Data Acquisition, Leica Scan Station 2, Park Avenue and 70 th Street, NY
|
|
|
- Lionel Stokes
- 5 years ago
- Views:
Transcription



1 Automated registration of 3D-range with 2D-color images: an overview 44 th Annual Conference on Information Sciences and Systems Invited Session: 3D Data Acquisition and Analysis March 19 th 2010 Ioannis Stamos City University it of New York Hunter College & Graduate Center Data Acquisition, Leica Scan Station 2, Park Avenue and 70 th Street, NY



2 Park Avenue: Six registered scans (top view) Brightness Images System Overview Range Images 2D feature extraction Segmentation 3D feature extraction Partial Model Range-Intensity Registration Range-Range Registration Complete Model FINAL PHOTOREALISTIC MODEL FINAL MODEL

3 Range-Intensity Registration Fixed relative positioning - limitations 2D sensor is limited by 3D scanner 3D scanning slow/laborious process 2D image capture fast/flexible 2D sensor cannot dynamically adjust parameters on site Cannot handle historical photographs
4 Automated methods One 2D image Untextured 3D model Ikeuchi 03 (edges reflectance image) Troccoli & Allen 04 (shadows) Stamos & Allen 01 (rectangles) Liu, Stamos 05 (parallelepipeds) Liu, Stamos 07(lines) One 2D image - Textured 3D model Yang, Stewart etal. 07 Schindler (regularities) Multiple 2D images (SfM/stereo) 3D model Liu, Stamos 06, Zhao etal. 05 Aerial 2D images 3D model Ding 08, Fisher 09, Neumann 09, Kaminsky 09. Input: Range Images System Outline (Liu, Stamos) Input: 2D Images 3D Line Extraction Range Registration 3D Line Clustering 3D Feature Extraction 2D Line Extraction Vanishing Point Extraction Camera Calibration and Rectification 2D Feature Extraction Automatic Features Matching and Translation Computation Final Transformation Optimization


 3D")





5 3D feature extraction, Thomas Hunter Building 3D Line Extraction Clustered 3D Lines (3 major directions) 3D Face Extraction Range-Range Registration 3 Faces Extracted (Front, Left and Right) 3D Feature Extraction Line Clustering All 3D Lines Extracted Rectangular Parallelepipeds Clustering lines into vertical/horizontal parallelepipeds



6 System Outline (Liu, Stamos) Input: Range Images Input: 2D Images 3D Line Extraction Range Registration 3D Line Clustering 3D Feature Extraction 2D Line Extraction Vanishing Points Extraction Camera Calibration and Rectification 2D Feature Extraction Automatic Features Matching and Translation Computation Final Transformation Optimization 2D FEATURE EXTRACTION 2D Line Extraction 2D Feature Extraction VPs Extraction Rectified 2D Lines Camera Calibration and Rectification Matching between VPs and 3D scene major directions Extracted Rectangles Rotation between camera and 3D scene








7 Vanishing Points (2D line clustering) Computing Vanishing Points





8 Solving for the rotation Clustering 2D lines from 2D image into horizontal/vertical rectangles




9 3D Features 2D Features


10 Translation computation from a matched 3D-2D pair Matching 3D parallelepipeds with 2D rectangles 3D parallelepipeds 2D rectangles Matches shown in blue

11 The performance on Thomas Hunter Building FP CM G OP (%) RDT (%) TIME (sec) 117 x x x x x x x x x x x Recovered camera locations wrt texture-mapped point model






12 Recovered camera locations wrt texture-mapped point model Virtual (synthetic) scene views




13 Virtual (synthetic) scene views Virtual (synthetic) scene views
14 Discussion Advantages Accurate Limited user interaction 2D plane to 3D plane matching Limitations Requires major facades Higher-order features decrease generality Non-interactive speed System II Outline (lines) Input: Range Images Input: 2D Images 3D Line Extraction Range Registration 3D Line Clustering 3D Feature Extraction 2D Line Extraction Vanishing Points Extraction Camera Calibration and Rotation Computation 2D Feature Extraction Automated Feature Matching and Translation Computation Final Transformation Optimization





15 Feature Detection User Interaction Z w Y w O w X w OpenGL Frame Y i Z c P Y c f X i C X c C o



16 Matching VPs and 3D dirs Image Plane D 3D a α D 3D b V a V b Z c Y c P β f O w Y w C Z w X w X c Initial List of Candidate Matches D 3D a D 3D b V a V b D 3D c D 3D d V a D 3D a V b D 3D c D 3D b Refined List of Candidate Matches D 3D d
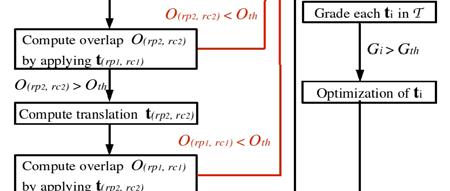
17 Focal length computation D 3D a α D 3D b Automatic Feature Matching and Translation Computation 3D Line Feature Get 2 pairs (l 3D a, l 2D a) and (l 3D b, l 2D b) 2D Line Feature Compute Translation C(l 3D a,l 2D a) Compute overlap O(l 3D b, l 2D b) by applying C(l 3D a, l 2D a) O(l 3D b, l 2D b) > Oth Compute Translation C(l 3D b, l 2D b) O(l 3D b, l 2D b) < Oth Compute overlap O(l 3D O(l 3D a, l 2D a) < Oth a, l 2D a) by applying C(l 3D b, l 2D b) No more pairs Grade each Ci in T Gi > Gth Optimization of Ci O(l 3D a, l 2D a) > Oth Candidate Trans C is the weighted average of C(l 3D a, l 2D a) and C(l 3D b, l 2D b). Store C in list T Final Translation

18 Translation computation: 3D-2D line match Image Plane A l 3D a S Y c l 2D a B Z c T C O w Y w X c R X w Z w Metric to be minimized for transform computation Kumar & Hanson




19 GCT 3D scene 2D image GCT User interaction 2D image



20 GCT Text. mapped 3D model (automated) 2D image GCT Text. mapped 3D model (automated) 2D image Corresponding 2D/proj. 3D lines


21 GCT 3D scene 2D image GCT Texture mapped 3D model Corresponding 2D/proj. 3D lines






22 Evaluation Selected 3D lines from 3D cloud Selected 2D lines Projection of 3D lines on 2D img Calculate error

")

")


23 3D lines 2D lines focal (init) focal (comp) Matches Error (pixels) Thomas Hunter Astor Place Grand Central Terminal







24 2D-image to 3D-range Registration Structure From Motion Range Images Many images CVPR, IJCV Unregistered Point Clouds 3D-range to 3D-SFM Registration Texture Mapping SFM Point Cloud Two Registered Point Clouds Final Output MULTIVIEW EXAMPLE
25 POSE AND STRUCTURE RECOVERY 3D Structure X j Common 2D-2D.. Frame 0 K[I 0] Frame 1 K[R 1 T 1 ] New Structure Frame 2 K[R 2 T 2 ] Frame N K[R N T N ] Initial pose and structure Compute [Ri Ti] using 6-point RANSAC Sequential updating to recover pose and structure 84 STRUCTURE AND MOTION REFINEMENT Bundle adjustment Minimize min reprojection D m error:,pˆ Mˆ m n Pˆ,Mˆ k i k 1 i 1 ki k i 2 Maximum Likelihood Estimation (assume error is zero-mean Gaussian noise) Huge problem but can be solved efficiently (use sparse bundle adjustment) 85



26 ALIGNING RANGE AND SFM POINT CLOUDS Range and SFM models Range model Range with overlaid SFM model (red)
27 3D-RANGE TO 3D-SFM REGISTRATION 3D-SFM points projected onto image 3D-Range points projected on same image Finding corresponding points between 3D-range and 3D-SFM models is possible on the 2D-image space 3D-RANGE TO 3D-SFM REGISTRATION 3D-SFM points projected onto image 3D-Range points projected on same image x :Projection of SFM point X x: Projection of SFM point X y : Projection of range point Y y: Projection of range point Y (X,Y) and (X,Y ) are candidate matches: y is the closest point to x and y the closest point to x in 2D-image space
 := # compatible matches (X,Y ).")
28 3D-RANGE TO 3D-SFM REGISTRATION Candidate matches (X,Y) and (X,Y ) are compatible iff the following scale factors are equal: 1. s 0 = X-C sfm / Y-C range 2. s 1 = X -C sfm / Y -C range 3. s 2 = X -X / Y -Y where C sfm is the COP wrt the SFM model and C range is the COP wrt the range model Confidence of (X,Y) := # compatible matches (X,Y ). Match (X,Y) with largest confidence among all 2D images provides the optimal scale factor s opt List C of robust matches := {(X,Y) such that s 0 s opt }U{(C sfm, C range ) of images} Scale, rotation, and translation computed by minimizing QUANTITATIVE RESULTS 91





29 Single Image to 3D range Structure-from-motion approach GRAND CENTRAL (1)

 Need accurate 3D features Need to")
30 GRAND CENTRAL (2) CONCLUSIONS Integration of multiview geometry with range registration 2D-to-3D registration is used for a subset of images that contain a sufficient number of linear features Brings these images into alignment with the dense 3D-range model Multiview geometry exploits 2D-point correspondences Brings all images into alignment and produces sparse SFM model 3D-range to 3D-SFM registration Aligns all images with the dense 3D-range model Accurate texture mapping onto dense 3D-range data Limitations: Need accurate vanishing points (3D-2D registration) Need accurate 3D features Need to handle symmetries
31 Credits Collaborators: Dr. Cecilia Chao Chen (Google, Inc.) Dr. Lingyun Liu (Google, Inc.) Dr. Siavash Zokai Dr. Gene Yu Prof. George Wolberg (CCNY) Funding: NSF CAREER,MRI,RI,MSC Awards PSC-CUNY Grants CUNY Institute of Software Design & Development Thank you
32 Automated registration of 3D-range with 2D-color images: an overview 44 th Annual Conference on Information Sciences and Systems Invited Session: 3D Data Acquisition and Analysis March 19 th 2010 Ioannis Stamos City University it of New York Hunter College & Graduate Center
Integrating Automated Range Registration with Multiview Geometry for the Photorealistic Modeling of Large-Scale Scenes
 Click here to download Manuscript: all.tex 1 1 1 1 1 0 1 0 1 Integrating Automated Range Registration with Multiview Geometry for the Photorealistic Modeling of Large-Scale Scenes Ioannis Stamos, Lingyun
Click here to download Manuscript: all.tex 1 1 1 1 1 0 1 0 1 Integrating Automated Range Registration with Multiview Geometry for the Photorealistic Modeling of Large-Scale Scenes Ioannis Stamos, Lingyun
AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS
 AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS Ioannis Stamos Department of Computer Science Hunter College, City University of New York 695 Park Avenue, New York NY 10065 istamos@hunter.cuny.edu http://www.cs.hunter.cuny.edu/
AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS Ioannis Stamos Department of Computer Science Hunter College, City University of New York 695 Park Avenue, New York NY 10065 istamos@hunter.cuny.edu http://www.cs.hunter.cuny.edu/
Estimation of Camera Pose with Respect to Terrestrial LiDAR Data
 Estimation of Camera Pose with Respect to Terrestrial LiDAR Data Wei Guan Suya You Guan Pang Computer Science Department University of Southern California, Los Angeles, USA Abstract In this paper, we present
Estimation of Camera Pose with Respect to Terrestrial LiDAR Data Wei Guan Suya You Guan Pang Computer Science Department University of Southern California, Los Angeles, USA Abstract In this paper, we present
Semi-automatic range to range registration: a feature-based method
 Semi-automatic range to range registration: a feature-based method Chen Chao Graduate Center of CUNY, New York, NY, CChen@gc.cuny.edu Ioannis Stamos Hunter College and Graduate Center of CUNY, New York,
Semi-automatic range to range registration: a feature-based method Chen Chao Graduate Center of CUNY, New York, NY, CChen@gc.cuny.edu Ioannis Stamos Hunter College and Graduate Center of CUNY, New York,
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
CSc Topics in Computer Graphics 3D Photography
 CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
Integrating Automated Range Registration with Multiview Geometry for the Photorealistic Modeling of Large-Scale Scenes
 Int J Comput Vis (2008) 78: 237 260 DOI 10.1007/s11263-007-0089-1 Integrating Automated Range Registration with Multiview Geometry for the Photorealistic Modeling of Large-Scale Scenes Ioannis Stamos Lingyun
Int J Comput Vis (2008) 78: 237 260 DOI 10.1007/s11263-007-0089-1 Integrating Automated Range Registration with Multiview Geometry for the Photorealistic Modeling of Large-Scale Scenes Ioannis Stamos Lingyun
Automatic Registration of LiDAR and Optical Imagery using Depth Map Stereo
 Automatic Registration of LiDAR and Optical Imagery using Depth Map Stereo Hyojin Kim Lawrence Livermore National Laboratory kim63@llnl.gov Carlos D. Correa Google Inc. cdcorrea@google.com Nelson Max University
Automatic Registration of LiDAR and Optical Imagery using Depth Map Stereo Hyojin Kim Lawrence Livermore National Laboratory kim63@llnl.gov Carlos D. Correa Google Inc. cdcorrea@google.com Nelson Max University
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Geometry and Texture Recovery of Scenes of Large Scale
 Computer Vision and Image Understanding 88, 94 118 (2002) doi:10.1006/cviu.2002.0963 Geometry and Texture Recovery of Scenes of Large Scale Ioannis Stamos Computer Science Department, Hunter College and
Computer Vision and Image Understanding 88, 94 118 (2002) doi:10.1006/cviu.2002.0963 Geometry and Texture Recovery of Scenes of Large Scale Ioannis Stamos Computer Science Department, Hunter College and
Automatic registration of 2 D with 3 D imagery in urban environments. 3 D rectangular structures from the range data and 2 D
 Automatic registration of 2 D with 3 D imagery in urban environments Ioannis Stamos and Peter K. Allen [Submitted for publication to ICCV 20] Abstract We are building a system that can automatically acquire
Automatic registration of 2 D with 3 D imagery in urban environments Ioannis Stamos and Peter K. Allen [Submitted for publication to ICCV 20] Abstract We are building a system that can automatically acquire
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
3D Modeling Using Planar Segments And Mesh Elements. Gene Yu and George Wolberg. City College / CUNY New York, NY 10031
 3D Modeling Using Planar Segments And Mesh Elements Ioannis Stamos Dept. of Computer Science Hunter College / CUNY New York, NY 10021 istamos@hunter.cuny.edu Gene Yu and George Wolberg Dept. of Computer
3D Modeling Using Planar Segments And Mesh Elements Ioannis Stamos Dept. of Computer Science Hunter College / CUNY New York, NY 10021 istamos@hunter.cuny.edu Gene Yu and George Wolberg Dept. of Computer
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Lecture 8.2 Structure from Motion. Thomas Opsahl
 Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
Low-Rank Based Algorithms for Rectification, Repetition Detection and De-Noising in Urban Images. A dissertation proposal by Juan Liu
 Low-Rank Based Algorithms for Rectification, Repetition Detection and De-Noising in Urban Images A dissertation proposal by Juan Liu Committee Committee: Professor Ioannis Stamos, Mentor, Hunter College
Low-Rank Based Algorithms for Rectification, Repetition Detection and De-Noising in Urban Images A dissertation proposal by Juan Liu Committee Committee: Professor Ioannis Stamos, Mentor, Hunter College
REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES
 REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES T. Yamakawa a, K. Fukano a,r. Onodera a, H. Masuda a, * a Dept. of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications,
REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES T. Yamakawa a, K. Fukano a,r. Onodera a, H. Masuda a, * a Dept. of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications,
Range Image Segmentation for Modeling and Object Detection in Urban Scenes
 Range Image Segmentation for Modeling and Object Detection in Urban Scenes Cecilia Chao Chen Ioannis Stamos Graduate Center / CUNY Hunter College / CUNY New York, NY 10016 New York, NY 10021 cchen@gc.cuny.edu
Range Image Segmentation for Modeling and Object Detection in Urban Scenes Cecilia Chao Chen Ioannis Stamos Graduate Center / CUNY Hunter College / CUNY New York, NY 10016 New York, NY 10021 cchen@gc.cuny.edu
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES
 COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Automated Feature-Based Range Registration of Urban Scenes of Large Scale
 Automated Feature-Based Range Registration of Urban Scenes of Large Scale Ioannis Stamos and Marius Leordeanu Department of Computer Science, Hunter College, City University of New York, NY, NY 1001 {istamos,mleordeanu}@hunter.cuny.edu
Automated Feature-Based Range Registration of Urban Scenes of Large Scale Ioannis Stamos and Marius Leordeanu Department of Computer Science, Hunter College, City University of New York, NY, NY 1001 {istamos,mleordeanu}@hunter.cuny.edu
Multi-view reconstruction for projector camera systems based on bundle adjustment
 Multi-view reconstruction for projector camera systems based on bundle adjustment Ryo Furuakwa, Faculty of Information Sciences, Hiroshima City Univ., Japan, ryo-f@hiroshima-cu.ac.jp Kenji Inose, Hiroshi
Multi-view reconstruction for projector camera systems based on bundle adjustment Ryo Furuakwa, Faculty of Information Sciences, Hiroshima City Univ., Japan, ryo-f@hiroshima-cu.ac.jp Kenji Inose, Hiroshi
Geometry based Repetition Detection for Urban Scene
 Geometry based Repetition Detection for Urban Scene Changchang Wu University of Washington Jan Michael Frahm UNC Chapel Hill Marc Pollefeys ETH Zürich Related Work Sparse Feature Matching [Loy et al. 06,
Geometry based Repetition Detection for Urban Scene Changchang Wu University of Washington Jan Michael Frahm UNC Chapel Hill Marc Pollefeys ETH Zürich Related Work Sparse Feature Matching [Loy et al. 06,
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Multiview Photogrammetry 3D Virtual Geology for everyone
 Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras
 Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Omni Stereo Vision of Cooperative Mobile Robots
 Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera
 Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera Michael P. Cutter University of California at Santa Cruz Baskin School of Engineering (Computer Engineering department) Santa Cruz,
Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera Michael P. Cutter University of California at Santa Cruz Baskin School of Engineering (Computer Engineering department) Santa Cruz,
Estimating the Location of a Camera with Respect to a 3D Model
 Estimating the Location of a Camera with Respect to a 3D Model Gehua Yang Jacob Becker Charles V. Stewart Department of Computer Science Rensselaer Polytechnic Institute Troy, NY 12180, U.S.A. {yangg2,beckej,stewart}@cs.rpi.edu
Estimating the Location of a Camera with Respect to a 3D Model Gehua Yang Jacob Becker Charles V. Stewart Department of Computer Science Rensselaer Polytechnic Institute Troy, NY 12180, U.S.A. {yangg2,beckej,stewart}@cs.rpi.edu
A New Representation for Video Inspection. Fabio Viola
 A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
Perspective projection
 Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
AIT Inline Computational Imaging: Geometric calibration and image rectification
 AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
High Definition Modeling of Calw, Badstrasse and its Google Earth Integration
 Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
Model Selection for Automated Architectural Reconstruction from Multiple Views
 Model Selection for Automated Architectural Reconstruction from Multiple Views Tomáš Werner, Andrew Zisserman Visual Geometry Group, University of Oxford Abstract We describe progress in automatically
Model Selection for Automated Architectural Reconstruction from Multiple Views Tomáš Werner, Andrew Zisserman Visual Geometry Group, University of Oxford Abstract We describe progress in automatically
Textured Mesh Surface Reconstruction of Large Buildings with Multi-View Stereo
 The Visual Computer manuscript No. (will be inserted by the editor) Textured Mesh Surface Reconstruction of Large Buildings with Multi-View Stereo Chen Zhu Wee Kheng Leow Received: date / Accepted: date
The Visual Computer manuscript No. (will be inserted by the editor) Textured Mesh Surface Reconstruction of Large Buildings with Multi-View Stereo Chen Zhu Wee Kheng Leow Received: date / Accepted: date
A Vision-based 2D-3D Registration System
 A Vision-based 2D-3D Registration System Quan Wang, Suya You CGIT/IMSC USC Los Angeles, CA 90089 quanwang@usc.edu, suyay@graphics.usc.edu Abstract In this paper, we propose an automatic system for robust
A Vision-based 2D-3D Registration System Quan Wang, Suya You CGIT/IMSC USC Los Angeles, CA 90089 quanwang@usc.edu, suyay@graphics.usc.edu Abstract In this paper, we propose an automatic system for robust
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Real Time Detection of Repeated Structures in Point Clouds of Urban Scenes
 Real Time Detection of Repeated Structures in Point Clouds of Urban Scenes Sam Friedman Hunter College & Graduate Center 695 Park Ave, New York NY, 10021 http:// www.welike2draw.com/ vision/ Ioannis Stamos
Real Time Detection of Repeated Structures in Point Clouds of Urban Scenes Sam Friedman Hunter College & Graduate Center 695 Park Ave, New York NY, 10021 http:// www.welike2draw.com/ vision/ Ioannis Stamos
Automatic registration of aerial imagery with untextured 3D LiDAR models
 Automatic registration of aerial imagery with untextured 3D LiDAR models Min Ding, Kristian Lyngbaek and Avideh Zakhor University of California, Berkeley Electrical Engineering and Computer Science Department
Automatic registration of aerial imagery with untextured 3D LiDAR models Min Ding, Kristian Lyngbaek and Avideh Zakhor University of California, Berkeley Electrical Engineering and Computer Science Department
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Quality Report Generated with version
 Quality Report Generated with version 3.3.67 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the feature Click here for additional
Quality Report Generated with version 3.3.67 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the feature Click here for additional
Quality Report Generated with version
 Quality Report Generated with version 1.3.54 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the feature Click here for additional
Quality Report Generated with version 1.3.54 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the feature Click here for additional
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
A Desktop 3D Scanner Exploiting Rotation and Visual Rectification of Laser Profiles
 A Desktop 3D Scanner Exploiting Rotation and Visual Rectification of Laser Profiles Carlo Colombo, Dario Comanducci, and Alberto Del Bimbo Dipartimento di Sistemi ed Informatica Via S. Marta 3, I-5139
A Desktop 3D Scanner Exploiting Rotation and Visual Rectification of Laser Profiles Carlo Colombo, Dario Comanducci, and Alberto Del Bimbo Dipartimento di Sistemi ed Informatica Via S. Marta 3, I-5139
Binocular Stereo Vision. System 6 Introduction Is there a Wedge in this 3D scene?
 System 6 Introduction Is there a Wedge in this 3D scene? Binocular Stereo Vision Data a stereo pair of images! Given two 2D images of an object, how can we reconstruct 3D awareness of it? AV: 3D recognition
System 6 Introduction Is there a Wedge in this 3D scene? Binocular Stereo Vision Data a stereo pair of images! Given two 2D images of an object, how can we reconstruct 3D awareness of it? AV: 3D recognition
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Improving Initial Estimations for Structure from Motion Methods
 Improving Initial Estimations for Structure from Motion Methods University of Bonn Outline Motivation Computer-Vision Basics Stereo Vision Bundle Adjustment Feature Matching Global Initial Estimation Component
Improving Initial Estimations for Structure from Motion Methods University of Bonn Outline Motivation Computer-Vision Basics Stereo Vision Bundle Adjustment Feature Matching Global Initial Estimation Component
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
EVOLUTION OF POINT CLOUD
 Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction
 Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS
 METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Dense 3D Modelling and Monocular Reconstruction of Deformable Objects
 Dense 3D Modelling and Monocular Reconstruction of Deformable Objects Anastasios (Tassos) Roussos Lecturer in Computer Science, University of Exeter Research Associate, Imperial College London Overview
Dense 3D Modelling and Monocular Reconstruction of Deformable Objects Anastasios (Tassos) Roussos Lecturer in Computer Science, University of Exeter Research Associate, Imperial College London Overview
Image stitching. Announcements. Outline. Image stitching
 Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds
 www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
Quality assessment and comparison of smartphone, airborne and leica c10 laser scanner based point clouds
 Delft University of Technology Quality assessment and comparison of smartphone, airborne and leica c10 laser scanner based point clouds Sirmacek, Beril; Lindenbergh, Roderik; Wang, Jinhu DOI 10.5194/isprs-archives-XLI-B5-581-2016
Delft University of Technology Quality assessment and comparison of smartphone, airborne and leica c10 laser scanner based point clouds Sirmacek, Beril; Lindenbergh, Roderik; Wang, Jinhu DOI 10.5194/isprs-archives-XLI-B5-581-2016
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/91/106305353.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation
 A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements
 Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
28 out of 28 images calibrated (100%), all images enabled. 0.02% relative difference between initial and optimized internal camera parameters
, all images enabled. 0.02% relative difference between initial and optimized internal camera parameters") Dronedata Render Server Generated Quality Report Phase 1 Time 00h:01m:56s Phase 2 Time 00h:04m:35s Phase 3 Time 00h:13m:45s Total Time All Phases 00h:20m:16s Generated with Pix4Dmapper Pro - TRIAL version
Dronedata Render Server Generated Quality Report Phase 1 Time 00h:01m:56s Phase 2 Time 00h:04m:35s Phase 3 Time 00h:13m:45s Total Time All Phases 00h:20m:16s Generated with Pix4Dmapper Pro - TRIAL version
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Supplementary Note to Detecting Building-level Changes of a City Using Street Images and a 2D City Map
 Supplementary Note to Detecting Building-level Changes of a City Using Street Images and a 2D City Map Daiki Tetsuka Takayuki Okatani Graduate School of Information Sciences, Tohoku University okatani@vision.is.tohoku.ac.jp
Supplementary Note to Detecting Building-level Changes of a City Using Street Images and a 2D City Map Daiki Tetsuka Takayuki Okatani Graduate School of Information Sciences, Tohoku University okatani@vision.is.tohoku.ac.jp
Recognizing Buildings in Urban Scene of Distant View ABSTRACT
 Recognizing Buildings in Urban Scene of Distant View Peilin Liu, Katsushi Ikeuchi and Masao Sakauchi Institute of Industrial Science, University of Tokyo, Japan 7-22-1 Roppongi, Minato-ku, Tokyo 106, Japan
Recognizing Buildings in Urban Scene of Distant View Peilin Liu, Katsushi Ikeuchi and Masao Sakauchi Institute of Industrial Science, University of Tokyo, Japan 7-22-1 Roppongi, Minato-ku, Tokyo 106, Japan
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Outline of Presentation. Introduction to Overwatch Geospatial Software Feature Analyst and LIDAR Analyst Software
 Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Quality Report Generated with Pix4Dmapper Pro version
 Quality Report Generated with Pix4Dmapper Pro version 3.1.23 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the sections Click
Quality Report Generated with Pix4Dmapper Pro version 3.1.23 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the sections Click
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
A Factorization Method for Structure from Planar Motion
 A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Sampling based Bundle Adjustment using Feature Matches between Ground-view and Aerial Images
 Sampling based Bundle Adjustment using Feature Matches between Ground-view and Aerial Images Hideyuki Kume, Tomokazu Sato and Naokazu Yokoya Nara Institute of Science and Technology, 8916-5 Takayama, Ikoma,
Sampling based Bundle Adjustment using Feature Matches between Ground-view and Aerial Images Hideyuki Kume, Tomokazu Sato and Naokazu Yokoya Nara Institute of Science and Technology, 8916-5 Takayama, Ikoma,
Clustering. Robert M. Haralick. Computer Science, Graduate Center City University of New York
 Clustering Robert M. Haralick Computer Science, Graduate Center City University of New York Outline K-means 1 K-means 2 3 4 5 Clustering K-means The purpose of clustering is to determine the similarity
Clustering Robert M. Haralick Computer Science, Graduate Center City University of New York Outline K-means 1 K-means 2 3 4 5 Clustering K-means The purpose of clustering is to determine the similarity