MULTIPLE DRONE CINEMATOGRAPHY I. Mademlis 1, I. Pitas 1, A. Messina 2
|
|
|
- Maximilian Knight
- 5 years ago
- Views:
Transcription

1 MULTIPLE DRONE CINEMATOGRAPHY I. Mademlis 1, I. Pitas 1, A. Messina 2 1 Aristotle University of Thessaloniki 2 Rai - Centre for Research and Technological Innovation





2
3 MULTIDRONE in a nutshell H2020 ICT Research and Innovation Actions on multiple-actor systems 8 partners Univ. of Thessaloniki, University of Bristol, THALES, RAI, Deutsche Welle, Istituto Superior Tecnico, Univ. of Seville, Alerion



4 Main Objectives Improved multiple drone decisional autonomy, robustness and safety; Innovative, safe and fast multiple drone active perception and AV shooting Application and demonstration in three media production scenarios

5 UAV Cinematography UAV cinematography is mainly derived from traditional ground and aerial cinematography, but must also take into account UAV-specific limitations, capabilities, properties. A visual vocabulary of UAV cinematography can be defined, consisting in: Shot types Combinations of framing shot types + UAV / camera motion types. 2009, Jim Zuckerman
6 UAV Cinematography Composition principles: Central Composition. Rule of Thirds. Lighting rules. Depth-of-Field / Focus settings. Need to define a standardized UAV shot type taxonomy
7 UAV Cinematography Actual drone footage and related articles / guidelines were used to this end: A total of 8 framing (static) shot types and 26 UAV / camera motion types suitable for UAV media production have been identified. Camera motion types were clustered into groups according to their characteristics. Visually pleasing combinations of framing shot types and camera motion types were identified.
8 Framing Shot Types Framing Shot Types are more or less those of traditional cinematography. Most are defined based on the percentage of the video frame width / height covered by the single target / subject. FRAMING SHOT TYPE Percentage of frame width/height covered by target Extreme Long Shot (ELS) <5% Very Long Shot (VLS) 5-20% Long Shot (LS) 20-40% Medium Shot (MS) 40-60% Medium Close Up (MCU) 60-75% Close Up (CU) >75%
9 Framing Shot Types A couple of Framing Shot Types deal with two or more subjects / targets: 2 Shot / 3 Shot: 2/3 subjects appear on frame, equally visible (typically LS or MS). Over the Shoulder (OTS): Adapted from traditional cinematography OTS. Main target fully visible, secondary target visible at the video frame edge.




10 Framing Shot Types Example UAV shot types when shooting boat targets from the side. Extreme Long Shot Long Shot Medium Close Up Two Shot
11 UAV / Camera Motion Types UAV / camera motion types can be considered as either scene-oriented or target-oriented. Four groups of UAV / camera motion types were defined. Static shots (6). No UAV motion, target may or may not be present: Static Shot (SS) Static Shot of Still Target (SSST) Static Shot of Moving Target (SSMT) Static Aerial Pan (SAP) Static Aerial Tilt (SAT).
12 UAV / Camera Motion Types Dynamic shots (6). Moving UAV, no target: Moving Aerial Pan or Tilt (MAP, MAT) Pedestal / Elevator Shot (PS) Bird s Eye Shot (BIRD) Moving Bird s Eye Shot (MOVBIRD) Survey Shot (SURVEY) Fly-Through (FLYTHROUGH).
13 UAV / Camera Motion Types Target Tracking shots (11). UAV motion depends on target motion: Moving Aerial Pan with Moving Target (MAPMT) Moving Aerial Tilt with Moving Target (MATMT) Lateral Tracking Shot (LTS) Vertical Tracking Shot (VTS) Orbit (ORBIT) Fly-Over (FLYOVER) Fly-By (FLYBY).
14 UAV / Camera Motion Types Target Tracking shots (continued) Chase/Follow Shot (CHASE) Descent (DESCENT) Descent-Over (DESCENTOVER) Ascent (ASCENT)

15 UAV / Camera Motion Types Lateral Tracking Shot (LTS) Camera stays focused on the moving target. UAV flies sideways / in parallel to the target, matching its speed. Source: Youtube: "5 Drone Moves Every Flier Should Know",

16 UAV / Camera Motion Types Chase/Follow (CHASE) Camera stays focused on the moving target. UAV follows / leads the target from behind / from the front, matching its speed. Source: Youtube: "Drone footage of Cycle- Racing", 4LC9ig
. Source: Youtube: \"Drone Chasing Horses\", https://www.youtube.com/watch?")
17 UAV / Camera Motion Types Orbit (ORBIT) Camera gimbal is slowly rotating, so as to keep the still or moving target properly framed. UAV circles around the target while following its trajectory (if any). Source: Youtube: "Drone Chasing Horses", uw8py9qmw


18 UAV / Camera Motion Types Static Aerial Tilt (SAT) UAV hovers. Camera gimbal rotates slowly around the pitch axis in order to capture the scene context. Source: Youtube: "5 Drone Moves Every Flier Should Know", =1hz-lkx4o6c

19 UAV / Camera Motion Types Moving Bird s Eye Shot (MOVBIRD) Camera remains stable facing vertically down. UAV is slowly flying parallel to the terrain with constant velocity. Source: Youtube: "How to film amazing aerials with your drone DroneFilmSchool", ch?v=zmqcsdj7vbe

20 UAV / Camera Motion Types Survey Shot Camera remains stable facing ahead or backwards. UAV is slowly flying parallel to the terrain with constant velocity. Source: Youtube: "Manor House Stables - Drone Film - Horses", ch?v=56qonxc28dw copyright owner: M7 Aerial
21 UAV / Camera Motion Types Dynamic Target shots (3): a target exists, but UAV trajectory also depends on other factors Constrained Lateral Tracking Shot (CONLTS) Pedestal/Elevator with Target (PST) Reveal Shot (REVEAL) Constrained Lateral Tracking Shot (CONLTS) Camera remains stable, focused on the moving target. UAV follows the target but it is constrained to move onto a pre-defined flight plane vertical to the ground plane. Useful in sports, e.g. football.



22 Multiple UAV Motion Types Motion types involving 2 or more drones in orchestrated motion can be also considered.

23 Target detection

24 Target detection


25 Target detection Target/object examples: athletes, boats, biclycles.

26 Target detection
27 Object detection Single view object detection Deep learning (CNN) object detection. Light weight CNNs for object detection. Multiple view object detection.

28 Object detection Object detection = classification + localization: Find what is in a picture as well as where it is.
29 Object detection Input: an image. Output: bounding boxes containing depicted objects. Each image contains a different number of objects (outputs). Typical approach: train a specialized classifier and deploy in sliding-window style to detect all object of that class. Very inefficient, quite ineffective. Goal: combine classification and localization into a single architecture for multiple, multiclass object detection.
30 Object detection with CNNs Deep Learning (DL) approach: train a classifier on, say, 1000 classes of ILSVRC. OverFeat (2013) was one of the first DL approaches to object detection. Its convolutional method made multi-scale sliding window efficient. Based on AlexNet architecture.

31 Object detection with CNNs Overfeat: Object detection at increasing image resolutions Sermanet, Pierre, et al. "Overfeat: Integrated recognition, localization and detection using convolutional networks." International Conference on Learning Representations (ICLR2014), CBLS, April
32 Object detection with CNNs Impact of Deep Learning. Pascal VOC (object detection)
33 Imaging for drone safety Human crowd detection for safe autonomous drones Emergency landing site detection.
34 Human crowd detection for safe autonomous drones Detect where crowd exists. Comply with legislation. Detect emergency landing points. Provide heatmaps of the estimated probability of crowd presence in each location.


35 Human crowd detection for safe autonomous drones
36 Human crowd detection for safe autonomous drones Limited previous efforts on crowd detection, using computer vision techniques. Crowded scenes are considered in related research works involving crowds, e.g.,: crowd understanding, crowd counting, human detection and tracking in crowds.
37 Human crowd detection for drone flight safety using CNNs In [1], a method utilizing Convolutional Neural Networks (CNNs) for crowd detection is proposed. Two approaches: transforming a pre-trained CNN to a fast, fully-convolutional network, devising a two-loss-training model, enhancing the separability of the crowd and non-crowd classes. [1] Tzelepi, Maria, and Anastasios Tefas, "Human Crowd Detection for Drone Flight Safety Using Convolutional Neural Networks." in European Signal Processing Conference (EUSIPCO), Kos, Greece, 2017.
38 Human crowd detection for drone flight safety using CNNs Provide lightweight models, as imposed by the computational restrictions of the application. Effectively distinguish between crowded and non-crowded scenes. Provide crowd heatmaps to semantically enhance flight maps by defining no-fly zones.

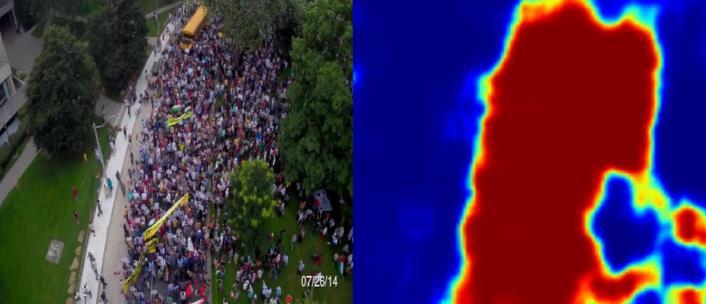
39 Human crowd heatmaps

40 Human crowd heatmaps
41
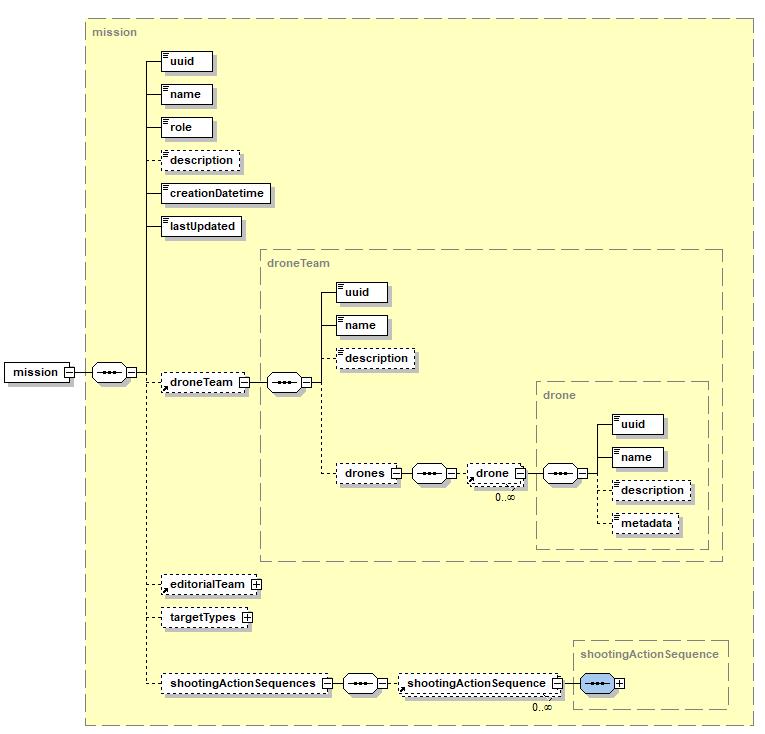
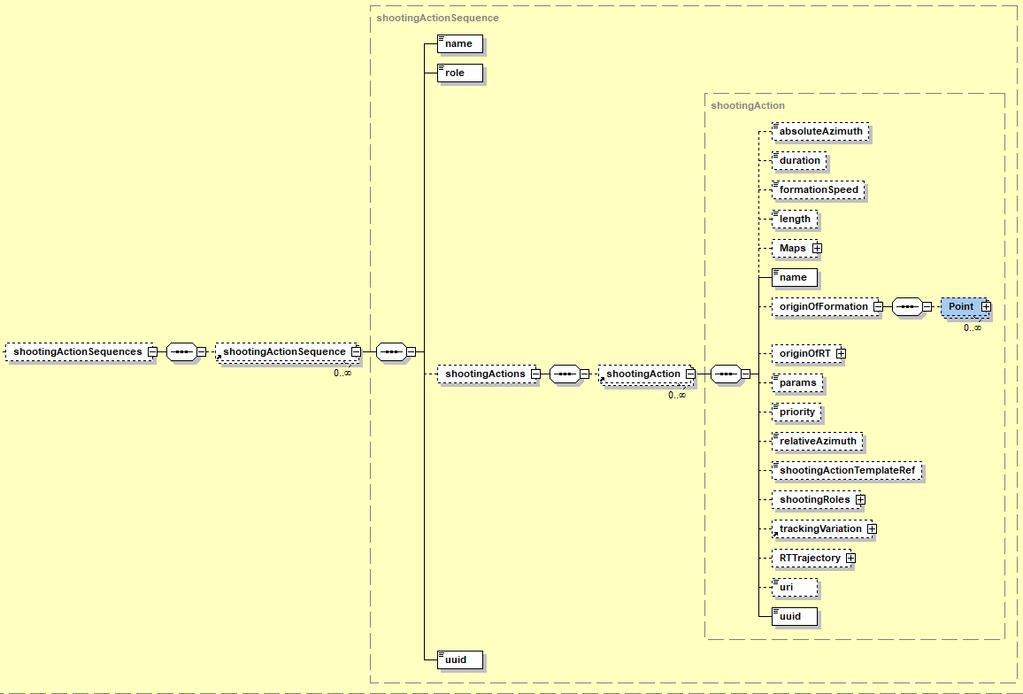
42 Production Planning Schema XML Schema
43 Conclusions MULTIDRONE is aiming at defining and developing innovative multi-actor autonomous system for UAV-based media production Many challenges, here we focused on two Drone cinematography principles for media production planning Target detection for automated tracking using DL
44

45
Drone Cinematography
 Drone Cinematography Contributors: N. Nikolaidis, I. Mademlis, I. Pitas Aristotle University of Thessaloniki, Greece Presenter: Prof. Ioannis Pitas Aristotle University of Thessaloniki pitas@aiia.csd.auth.gr
Drone Cinematography Contributors: N. Nikolaidis, I. Mademlis, I. Pitas Aristotle University of Thessaloniki, Greece Presenter: Prof. Ioannis Pitas Aristotle University of Thessaloniki pitas@aiia.csd.auth.gr
VIDEO PRODUCTION TECHNOLOGY AND LIVELIHOOOD EDUCATION Y2 THIRD TERM AY
 VIDEO PRODUCTION MOTION PICTURE a series of pictures projected on a screen in a rapid succession with objects shown in successive positions slightly changed so as to produce the optical effect of a continuous
VIDEO PRODUCTION MOTION PICTURE a series of pictures projected on a screen in a rapid succession with objects shown in successive positions slightly changed so as to produce the optical effect of a continuous
Screenplay. Timing and motion. Martin Constable October 23, RMIT Vietnam
 Screenplay Timing and motion Martin Constable October 23, 2017 RMIT Vietnam The Storyboard A storyboard is made before a movie is shot (i.e. production). A storyboard: Indicate how the story will be told.
Screenplay Timing and motion Martin Constable October 23, 2017 RMIT Vietnam The Storyboard A storyboard is made before a movie is shot (i.e. production). A storyboard: Indicate how the story will be told.
Equipment. Remote Systems & Sensors. Altitude Imaging uses professional drones and sensors operated by highly skilled remote pilots
 Remote Systems & Sensors Altitude Imaging uses professional drones and sensors operated by highly skilled remote pilots Equipment www.altitude-imaging.com About Us Altitude Imaging has been providing a
Remote Systems & Sensors Altitude Imaging uses professional drones and sensors operated by highly skilled remote pilots Equipment www.altitude-imaging.com About Us Altitude Imaging has been providing a
Video Basics. Camera Shots, Camera Angles, and Camera Movement
 Video Basics Camera Shots, Camera Angles, and Camera Movement The Building Blocks of Video: O Frame O Shot O Scene O Sequence The Frame O The smallest piece of information in film. O A single still image
Video Basics Camera Shots, Camera Angles, and Camera Movement The Building Blocks of Video: O Frame O Shot O Scene O Sequence The Frame O The smallest piece of information in film. O A single still image
Fuzzy Set Theory in Computer Vision: Example 3
 Fuzzy Set Theory in Computer Vision: Example 3 Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Purpose of these slides are to make you aware of a few of the different CNN architectures
Fuzzy Set Theory in Computer Vision: Example 3 Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Purpose of these slides are to make you aware of a few of the different CNN architectures
The Modern Archetype of Drones. Symmetrical facet design radiates a brilliance in the sky
 The Modern Archetype of Drones Symmetrical facet design radiates a brilliance in the sky INSTANT FLYING The Xiro Xplorer is ready to fly right out of the box. Attach the propellers, install the battery
The Modern Archetype of Drones Symmetrical facet design radiates a brilliance in the sky INSTANT FLYING The Xiro Xplorer is ready to fly right out of the box. Attach the propellers, install the battery
INSPIRE 1 Quick Start Guide V1.0
 INSPIRE Quick Start Guide V.0 The Inspire is a professional aerial filmmaking and photography platform that is ready to fly right out of the box. Featuring an onboard camera equipped with a 0mm lens and
INSPIRE Quick Start Guide V.0 The Inspire is a professional aerial filmmaking and photography platform that is ready to fly right out of the box. Featuring an onboard camera equipped with a 0mm lens and
A COMPARISON OF STANDARD FIXED-WING VS MULTIROTOR DRONE PHOTOGRAMMETRY SURVEYS
 A COMPARISON OF STANDARD FIXED-WING VS MULTIROTOR DRONE PHOTOGRAMMETRY SURVEYS Dr Steve Harwin, UAV Operations, Tas KEY QUESTIONS What detail, scale and accuracy are needed? For change analysis the data
A COMPARISON OF STANDARD FIXED-WING VS MULTIROTOR DRONE PHOTOGRAMMETRY SURVEYS Dr Steve Harwin, UAV Operations, Tas KEY QUESTIONS What detail, scale and accuracy are needed? For change analysis the data
Spark Release Notes. What s New? Notes:
 Date: 2017.12.13 Aircraft Firmware: V 01.00.0800 Remote Controller Firmware: V 01.00.0400 DJI GO 4 App ios: V 4.1.22 DJI GO 4 App Android: V 4.1.22 Added support for DJI Goggles RE (with firmware v01.00.00.02
Date: 2017.12.13 Aircraft Firmware: V 01.00.0800 Remote Controller Firmware: V 01.00.0400 DJI GO 4 App ios: V 4.1.22 DJI GO 4 App Android: V 4.1.22 Added support for DJI Goggles RE (with firmware v01.00.00.02
Lightweight Two-Stream Convolutional Face Detection
 Lightweight Two-Stream Convolutional Face Detection Danai Triantafyllidou, Paraskevi Nousi and Anastasios Tefas Department of Informatics, Aristotle University of Thessaloniki, Thessaloniki, Greece danaitri22@gmail.com,
Lightweight Two-Stream Convolutional Face Detection Danai Triantafyllidou, Paraskevi Nousi and Anastasios Tefas Department of Informatics, Aristotle University of Thessaloniki, Thessaloniki, Greece danaitri22@gmail.com,
CS5245 VISION & GRAPHICS FOR SPECIAL EFFECTS PROJECT PROPOSAL
 CS5245 VISION & GRAPHICS FOR SPECIAL EFFECTS PROJECT PROPOSAL Title of effect video Out of Control Project team members Chen Ling Wei U065170E Tan Rei Wen Alex U065359M Wang Kai U065179J The Effect A missile
CS5245 VISION & GRAPHICS FOR SPECIAL EFFECTS PROJECT PROPOSAL Title of effect video Out of Control Project team members Chen Ling Wei U065170E Tan Rei Wen Alex U065359M Wang Kai U065179J The Effect A missile
Epic Made Easy The Redesigned 350 QX3
 Available November 2014 350 QX3 AP Combo BLH8160 (APC) Epic Made Easy The Redesigned 350 QX3 Capturing spectacular aerial video and stills is even easier with the new Blade 350 QX3. Its simplified controls,
Available November 2014 350 QX3 AP Combo BLH8160 (APC) Epic Made Easy The Redesigned 350 QX3 Capturing spectacular aerial video and stills is even easier with the new Blade 350 QX3. Its simplified controls,
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
Homework #1. Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling
 Computer Graphics Instructor: Brian Curless CSE 457 Spring 2014 Homework #1 Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Saturday, April th Due:
Computer Graphics Instructor: Brian Curless CSE 457 Spring 2014 Homework #1 Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Saturday, April th Due:
Vision Based Tracking for Unmanned Aerial Vehicle
 Advances in Aerospace Science and Applications. ISSN 2277-3223 Volume 4, Number 1 (2014), pp. 59-64 Research India Publications http://www.ripublication.com/aasa.htm Vision Based Tracking for Unmanned
Advances in Aerospace Science and Applications. ISSN 2277-3223 Volume 4, Number 1 (2014), pp. 59-64 Research India Publications http://www.ripublication.com/aasa.htm Vision Based Tracking for Unmanned
Fuzzy Set Theory in Computer Vision: Example 3, Part II
 Fuzzy Set Theory in Computer Vision: Example 3, Part II Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Resource; CS231n: Convolutional Neural Networks for Visual Recognition https://github.com/tuanavu/stanford-
Fuzzy Set Theory in Computer Vision: Example 3, Part II Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Resource; CS231n: Convolutional Neural Networks for Visual Recognition https://github.com/tuanavu/stanford-
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Dragonfly Pro USER MANUAL
 New vision of the world Shenzhen Simtoo Intelligent Technology Co., Ltd. West Industry Building A5, Park Road, Bao An District, Shenzhen, China 518000 TEL: +86 755 2373 2452 Web: www.simtoo.com Email:
New vision of the world Shenzhen Simtoo Intelligent Technology Co., Ltd. West Industry Building A5, Park Road, Bao An District, Shenzhen, China 518000 TEL: +86 755 2373 2452 Web: www.simtoo.com Email:
Over the years, they have been used several tools to perform aerial surveys of analyzed to archaeological sites and monuments. From the plane to the
 Over the years, they have been used several tools to perform aerial surveys of analyzed to archaeological sites and monuments. From the plane to the balloon, the balloon to the telescopic rods, all of
Over the years, they have been used several tools to perform aerial surveys of analyzed to archaeological sites and monuments. From the plane to the balloon, the balloon to the telescopic rods, all of
Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving assistance applications on smart mobile devices
 Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Pervasive Computing. OpenLab Jan 14 04pm L Institute of Networked and Embedded Systems
 Pervasive Computing Institute of Networked and Embedded Systems OpenLab 2010 Jan 14 04pm L4.1.01 MISSION STATEMENT Founded in 2007, the Pervasive Computing Group at Klagenfurt University is part of the
Pervasive Computing Institute of Networked and Embedded Systems OpenLab 2010 Jan 14 04pm L4.1.01 MISSION STATEMENT Founded in 2007, the Pervasive Computing Group at Klagenfurt University is part of the
Design and Development of Unmanned Tilt T-Tri Rotor Aerial Vehicle
 Design and Development of Unmanned Tilt T-Tri Rotor Aerial Vehicle K. Senthil Kumar, Mohammad Rasheed, and T.Anand Abstract Helicopter offers the capability of hover, slow forward movement, vertical take-off
Design and Development of Unmanned Tilt T-Tri Rotor Aerial Vehicle K. Senthil Kumar, Mohammad Rasheed, and T.Anand Abstract Helicopter offers the capability of hover, slow forward movement, vertical take-off
Reality Modeling Drone Capture Guide
 Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
Autodesk Navisworks Freedom Quick Reference Guide
 WP CAD 00074 March 2012 Guide by Andy Davis Autodesk Navisworks Freedom Quick Reference Guide Quick Reference Guide to Autodesk Navisworks Freedom Opening a Model To open a model, click on the Application
WP CAD 00074 March 2012 Guide by Andy Davis Autodesk Navisworks Freedom Quick Reference Guide Quick Reference Guide to Autodesk Navisworks Freedom Opening a Model To open a model, click on the Application
MAVIC PRO. Quick Start Guide V1.4
 MAVIC PRO Quick Start Guide V1.4 Aircraft The DJITM MAVICTM Pro is DJI's smallest flying camera, featuring a fully stabilized camera, Intelligent Flight Modes and Obstacle Avoidance inside a revolutionary
MAVIC PRO Quick Start Guide V1.4 Aircraft The DJITM MAVICTM Pro is DJI's smallest flying camera, featuring a fully stabilized camera, Intelligent Flight Modes and Obstacle Avoidance inside a revolutionary
Project: UAV Payload Retract Mechanism. Company Background. Introduction
 Ascent Vision Technologies LLC 90 Aviation Lane Belgrade, MT 59714 Tel 406.388.2092 Fax 406.388.8133 www.ascentvision.com Project: UAV Payload Retract Mechanism Company Background Ascent Vision Technologies
Ascent Vision Technologies LLC 90 Aviation Lane Belgrade, MT 59714 Tel 406.388.2092 Fax 406.388.8133 www.ascentvision.com Project: UAV Payload Retract Mechanism Company Background Ascent Vision Technologies
Object Detection. Part1. Presenter: Dae-Yong
 Object Part1 Presenter: Dae-Yong Contents 1. What is an Object? 2. Traditional Object Detector 3. Deep Learning-based Object Detector What is an Object? Subset of Object Recognition What is an Object?
Object Part1 Presenter: Dae-Yong Contents 1. What is an Object? 2. Traditional Object Detector 3. Deep Learning-based Object Detector What is an Object? Subset of Object Recognition What is an Object?
Zero Launch Angle. since θ=0, then v oy =0 and v ox = v o. The time required to reach the water. independent of v o!!
 Zero Launch Angle y h since θ=0, then v oy =0 and v ox = v o and based on our coordinate system we have x o =0, y o =h x The time required to reach the water independent of v o!! 1 2 Combining Eliminating
Zero Launch Angle y h since θ=0, then v oy =0 and v ox = v o and based on our coordinate system we have x o =0, y o =h x The time required to reach the water independent of v o!! 1 2 Combining Eliminating
UNIT 22. Remote Sensing and Photogrammetry. Start-up. Reading. In class discuss the following questions:
 UNIT 22 Remote Sensing and Photogrammetry Start-up In class discuss the following questions: A. What do you know about remote sensing? B. What does photogrammetry do? C. Is there a connection between the
UNIT 22 Remote Sensing and Photogrammetry Start-up In class discuss the following questions: A. What do you know about remote sensing? B. What does photogrammetry do? C. Is there a connection between the
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
The mobile device holder can be tilted at different positions and angles. DO NOT force an overlarge mobile device into the mobile device holder.
 Remote Controller Profile The Phantom 3 Standard remote controller features a 2.4 GHz WiFi Video Downlink, 5.8 GHz aircraft transmission system, and a built-in battery. It is capable of transmitting signals
Remote Controller Profile The Phantom 3 Standard remote controller features a 2.4 GHz WiFi Video Downlink, 5.8 GHz aircraft transmission system, and a built-in battery. It is capable of transmitting signals
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
GH-50. Gimbal Head. You re on steady ground
 GH-50 Gimbal Head You re on steady ground 1 INTRODUCTION Thank You for choosing Oben! The Oben GH-50 is a gimbal-type tripod head designed to balance a lens along its vertical and horizontal axes. Ideal
GH-50 Gimbal Head You re on steady ground 1 INTRODUCTION Thank You for choosing Oben! The Oben GH-50 is a gimbal-type tripod head designed to balance a lens along its vertical and horizontal axes. Ideal
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
CS230: Lecture 3 Various Deep Learning Topics
 CS230: Lecture 3 Various Deep Learning Topics Kian Katanforoosh, Andrew Ng Today s outline We will learn how to: - Analyse a problem from a deep learning approach - Choose an architecture - Choose a loss
CS230: Lecture 3 Various Deep Learning Topics Kian Katanforoosh, Andrew Ng Today s outline We will learn how to: - Analyse a problem from a deep learning approach - Choose an architecture - Choose a loss
Surveying like never before
 CAD functionalities GCP Mapping and Aerial Image Processing Software for Land Surveying Specialists Surveying like never before www.3dsurvey.si Modri Planet d.o.o., Distributors: info@3dsurvey.si +386
CAD functionalities GCP Mapping and Aerial Image Processing Software for Land Surveying Specialists Surveying like never before www.3dsurvey.si Modri Planet d.o.o., Distributors: info@3dsurvey.si +386
Camera Actions. Shots, Angles & Movements
 Camera Actions Shots, Angles & Movements Camera Shots (Shot Sizes) Camera Shots There are several different Camera Shots used in TV and Film Production. Each Camera Shot is given a name and description
Camera Actions Shots, Angles & Movements Camera Shots (Shot Sizes) Camera Shots There are several different Camera Shots used in TV and Film Production. Each Camera Shot is given a name and description
Storyboarding and Scriptwriting AD210 Spring 2011 Gregory V. Eckler. Storyboarding and Scriptwriting Project 1
 Storyboarding and Scriptwriting Project 1 Project Title Schedule Opening The Show 4/6 Review Project 1 4/13 Project 1 Sketches Due 4/20 Project 1 Storyboards Due Project History Project Description Project
Storyboarding and Scriptwriting Project 1 Project Title Schedule Opening The Show 4/6 Review Project 1 4/13 Project 1 Sketches Due 4/20 Project 1 Storyboards Due Project History Project Description Project
Technical Paper of HITCSC Team for The International Aerial Robotics Competition
 Technical Paper of HITCSC Team for The International Aerial Robotics Competition Qingtao Yu, Yuanhong Li, Hang Yu, Haodi Yao, Rui Xing, Qi Zhao, Xiaowei Xing Harbin Institute of Tecnology ABSTRACT This
Technical Paper of HITCSC Team for The International Aerial Robotics Competition Qingtao Yu, Yuanhong Li, Hang Yu, Haodi Yao, Rui Xing, Qi Zhao, Xiaowei Xing Harbin Institute of Tecnology ABSTRACT This
Ronin-S Release Notes
 Date: 2018.11.19 Firmware: v1.6.0.50 Ronin App ios: v1.1.6 Ronin App Android: v1.1.6 DJI Pro Assistant for Ronin (PC): v2.0.0 DJI Pro Assistant for Ronin (Mac): v2.0.0 User Manual: v1.2 Added option to
Date: 2018.11.19 Firmware: v1.6.0.50 Ronin App ios: v1.1.6 Ronin App Android: v1.1.6 DJI Pro Assistant for Ronin (PC): v2.0.0 DJI Pro Assistant for Ronin (Mac): v2.0.0 User Manual: v1.2 Added option to
DJI Phantom 3 - Standard Edition + Softshell Backpack
 DJI Phantom 3 - Standard Edition + Softshell Backpack SAVE21% Drone Capabilities Included 2.7K / 12 Megapixel Camera Integrated 3-Axis Stabilization Gimbal Easy to Fly, Intelligent Flight System Live HD
DJI Phantom 3 - Standard Edition + Softshell Backpack SAVE21% Drone Capabilities Included 2.7K / 12 Megapixel Camera Integrated 3-Axis Stabilization Gimbal Easy to Fly, Intelligent Flight System Live HD
Mavic Air Release Notes
 Date : 2018.05.03 v01.00.0400 v4.2.12 v4.2.12 Improved firmware data safety. Fixed an issue where GPS location changes inexplicably, and when RTH is abnormal due to compass interference. Optimized vision
Date : 2018.05.03 v01.00.0400 v4.2.12 v4.2.12 Improved firmware data safety. Fixed an issue where GPS location changes inexplicably, and when RTH is abnormal due to compass interference. Optimized vision
Cs : Computer Vision Final Project Report
 Cs 600.461: Computer Vision Final Project Report Giancarlo Troni gtroni@jhu.edu Raphael Sznitman sznitman@jhu.edu Abstract Given a Youtube video of a busy street intersection, our task is to detect, track,
Cs 600.461: Computer Vision Final Project Report Giancarlo Troni gtroni@jhu.edu Raphael Sznitman sznitman@jhu.edu Abstract Given a Youtube video of a busy street intersection, our task is to detect, track,
Yield Estimation using faster R-CNN
 Yield Estimation using faster R-CNN 1 Vidhya Sagar, 2 Sailesh J.Jain and 2 Arjun P. 1 Assistant Professor, 2 UG Scholar, Department of Computer Engineering and Science SRM Institute of Science and Technology,Chennai,
Yield Estimation using faster R-CNN 1 Vidhya Sagar, 2 Sailesh J.Jain and 2 Arjun P. 1 Assistant Professor, 2 UG Scholar, Department of Computer Engineering and Science SRM Institute of Science and Technology,Chennai,
2D VISUAL TRACKING FOR SPORTS UAV CINEMATOGRAPHY APPLICATIONS
 2D VISUAL RACKING FOR SPORS UAV CINEMAOGRAPHY APPLICAIONS Orestis Zachariadis Vasileios Mygdalis Ioannis Mademlis Nikos Nikolaidis Ioannis Pitas Department of Electrical and Electronic Engineering, University
2D VISUAL RACKING FOR SPORS UAV CINEMAOGRAPHY APPLICAIONS Orestis Zachariadis Vasileios Mygdalis Ioannis Mademlis Nikos Nikolaidis Ioannis Pitas Department of Electrical and Electronic Engineering, University
Deep Learning for Remote Sensing
 1 ENPC Data Science Week Deep Learning for Remote Sensing Alexandre Boulch 2 ONERA Research, Innovation, expertise and long-term vision for industry, French government and Europe 3 Materials Optics Aerodynamics
1 ENPC Data Science Week Deep Learning for Remote Sensing Alexandre Boulch 2 ONERA Research, Innovation, expertise and long-term vision for industry, French government and Europe 3 Materials Optics Aerodynamics
PHANTOM 3. Quick Start Guide ADVANCED V1.2
 PHANTOM 3 ADVANCED Quick Start Guide V.2 Phantom 3 Advanced It s time to meet your Phantom. The Phantom 3 Advanced s camera records video at up to 080p/60fps and captures 2 megapixel photos. Review the
PHANTOM 3 ADVANCED Quick Start Guide V.2 Phantom 3 Advanced It s time to meet your Phantom. The Phantom 3 Advanced s camera records video at up to 080p/60fps and captures 2 megapixel photos. Review the
UNIT Media: Basic Video Camera Operations (SCQF level 5)
") National Unit Specification: general information CODE F585 11 SUMMARY The purpose of this Unit is to enable candidates to develop an understanding of basic video camera operations and processes. This is
National Unit Specification: general information CODE F585 11 SUMMARY The purpose of this Unit is to enable candidates to develop an understanding of basic video camera operations and processes. This is
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Marker Based Localization of a Quadrotor. Akshat Agarwal & Siddharth Tanwar
 Marker Based Localization of a Quadrotor Akshat Agarwal & Siddharth Tanwar Objective Introduction Objective: To implement a high level control pipeline on a quadrotor which could autonomously take-off,
Marker Based Localization of a Quadrotor Akshat Agarwal & Siddharth Tanwar Objective Introduction Objective: To implement a high level control pipeline on a quadrotor which could autonomously take-off,
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
HALF YEARLY EXAMINATIONS 2017/2018. Answer ALL questions showing your working Where necessary give your answers correct to 2 decimal places.
 Track 2 SECONDAR Y SCHOOL MRIEHEL HALF YEARLY EXAMINATIONS 2017/2018 FORM: 4 PHYSICS Time: 1½ hrs Name: Class: Answer ALL questions showing your working Where necessary give your answers correct to 2 decimal
Track 2 SECONDAR Y SCHOOL MRIEHEL HALF YEARLY EXAMINATIONS 2017/2018 FORM: 4 PHYSICS Time: 1½ hrs Name: Class: Answer ALL questions showing your working Where necessary give your answers correct to 2 decimal
Unmanned Vehicle Technology Researches for Outdoor Environments. *Ju-Jang Lee 1)
") Keynote Paper Unmanned Vehicle Technology Researches for Outdoor Environments *Ju-Jang Lee 1) 1) Department of Electrical Engineering, KAIST, Daejeon 305-701, Korea 1) jjlee@ee.kaist.ac.kr ABSTRACT The
Keynote Paper Unmanned Vehicle Technology Researches for Outdoor Environments *Ju-Jang Lee 1) 1) Department of Electrical Engineering, KAIST, Daejeon 305-701, Korea 1) jjlee@ee.kaist.ac.kr ABSTRACT The
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
DEEP NEURAL NETWORKS FOR OBJECT DETECTION
 DEEP NEURAL NETWORKS FOR OBJECT DETECTION Sergey Nikolenko Steklov Institute of Mathematics at St. Petersburg October 21, 2017, St. Petersburg, Russia Outline Bird s eye overview of deep learning Convolutional
DEEP NEURAL NETWORKS FOR OBJECT DETECTION Sergey Nikolenko Steklov Institute of Mathematics at St. Petersburg October 21, 2017, St. Petersburg, Russia Outline Bird s eye overview of deep learning Convolutional
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Stereoscopic Video Description for Human Action Recognition
 Stereoscopic Video Description for Human Action Recognition Ioannis Mademlis, Alexandros Iosifidis, Anastasios Tefas, Nikos Nikolaidis and Ioannis Pitas Department of Informatics, Aristotle University
Stereoscopic Video Description for Human Action Recognition Ioannis Mademlis, Alexandros Iosifidis, Anastasios Tefas, Nikos Nikolaidis and Ioannis Pitas Department of Informatics, Aristotle University
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Inspire 2 Release Notes
 Date: 2018.04.18 Remote Controller Firmware: DJI GO 4 app: V01.02.0100 V01.01.0010 ios V 4.2.12 or above, Android V 4.2.12 or above Added support for adjusting the maximum velocity of aircraft s real-time
Date: 2018.04.18 Remote Controller Firmware: DJI GO 4 app: V01.02.0100 V01.01.0010 ios V 4.2.12 or above, Android V 4.2.12 or above Added support for adjusting the maximum velocity of aircraft s real-time
Animation. Animation. Animation. Animation. Animation
 By Neil Moore B00653254 For my project I decided that I was going to use Brief 1 On your own. I had many different ideas that I could have chose from but I decided that stop motion was the way forward
By Neil Moore B00653254 For my project I decided that I was going to use Brief 1 On your own. I had many different ideas that I could have chose from but I decided that stop motion was the way forward
STEP 1: MODULE MOUNTING / WIRING:
 VER1.0 PINOUT DIAGRAM: PORT 1 - INPUT 1 (S.BUS, PWM, PPM INPUT) PORT 2 - INPUT 2 (PWM MODE INPUT OR AUX OUTPUT DEFINED IN SOFTWARE) PORT 3 - OUTPUT 1 (S.BUS OUTPUT) PORT 4 - OUTPUT 2 (SERVO OUTPUT) PORT
VER1.0 PINOUT DIAGRAM: PORT 1 - INPUT 1 (S.BUS, PWM, PPM INPUT) PORT 2 - INPUT 2 (PWM MODE INPUT OR AUX OUTPUT DEFINED IN SOFTWARE) PORT 3 - OUTPUT 1 (S.BUS OUTPUT) PORT 4 - OUTPUT 2 (SERVO OUTPUT) PORT
EVENT DETECTION AND HUMAN BEHAVIOR RECOGNITION. Ing. Lorenzo Seidenari
 EVENT DETECTION AND HUMAN BEHAVIOR RECOGNITION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it What is an Event? Dictionary.com definition: something that occurs in a certain place during a particular
EVENT DETECTION AND HUMAN BEHAVIOR RECOGNITION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it What is an Event? Dictionary.com definition: something that occurs in a certain place during a particular
YouTube (and other online video-sharing sites) The audience and message. In-the-field uses. The techniques. Camera movements Panning: left, right
 The audience and message. In-the-field uses. The techniques. Camera movements Panning: left, right") Proportion of total US Internet traffic (including video) YouTube (and other online video-sharing sites) Post video content. Develop video contests and/or collaborations. Being used extensively in training
Proportion of total US Internet traffic (including video) YouTube (and other online video-sharing sites) Post video content. Develop video contests and/or collaborations. Being used extensively in training
FPVMODEL. Rescue-2. Integrated with 1 OX Zoom HD Camera Intended for Search and Rescue Missions USER MANUAL
 FPVMODEL Rescue-2 USER MANUAL Integrated with 1 OX Zoom HD Camera Intended for Search and Rescue Missions FP IU n-= WWW.FPVMODEL.COM Copyright 201 7 FPVMODEL LIMITED WARNING AND DISCLAIMER Make sure not
FPVMODEL Rescue-2 USER MANUAL Integrated with 1 OX Zoom HD Camera Intended for Search and Rescue Missions FP IU n-= WWW.FPVMODEL.COM Copyright 201 7 FPVMODEL LIMITED WARNING AND DISCLAIMER Make sure not
Personalizing the EOS 1D Mark II with Custom and Personal Functions Part 1 Custom Functions Text copyright E.J. Peiker, all rights reserved
 Personalizing the EOS 1D Mark II with Custom and Personal Functions Part 1 Custom Functions Text copyright E.J. Peiker, all rights reserved Modern digital SLR s offer many ways to customize the performance
Personalizing the EOS 1D Mark II with Custom and Personal Functions Part 1 Custom Functions Text copyright E.J. Peiker, all rights reserved Modern digital SLR s offer many ways to customize the performance
PREMIUM PROPERTY MARKETING
 PREMIUM PROPERTY MARKETING 01789 722 500 contact@mcs-media.com www.mcs-media.com WHAT WE DO Aerial Drone videos Ground based videos Architectural photography 3D Walkthroughs Single property websites Professional
PREMIUM PROPERTY MARKETING 01789 722 500 contact@mcs-media.com www.mcs-media.com WHAT WE DO Aerial Drone videos Ground based videos Architectural photography 3D Walkthroughs Single property websites Professional
DSIAC TECHNICAL INQUIRY RESPONSE
 DSIAC TECHNICAL INQUIRY RESPONSE Comparison of GoPro Karma and DJI Mavic Pro Compact Drone Systems November 29, 2016 DSIAC is a Department of Defense Information Analysis Center MAIN OFFICE 4695 Millennium
DSIAC TECHNICAL INQUIRY RESPONSE Comparison of GoPro Karma and DJI Mavic Pro Compact Drone Systems November 29, 2016 DSIAC is a Department of Defense Information Analysis Center MAIN OFFICE 4695 Millennium
Stop-Motion TOPICS. The Stop-Motion Camera Stop-Motion Options Add Mode Stop-Motion Camera Orientation Onion Skin
 Stop-Motion Stop-Motion is a technique whereby objects are photographed in a series of slightly different positions such that they appear to move when the photographs are played back in quick succession.
Stop-Motion Stop-Motion is a technique whereby objects are photographed in a series of slightly different positions such that they appear to move when the photographs are played back in quick succession.
Part Localization by Exploiting Deep Convolutional Networks
 Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
QBALL-X4 QUICK START GUIDE
 QBALL-X4 QUICK START GUIDE A STEP BY STEP GUIDE TO FLY THE QBALL-X4 UAV This is a step by step guide to fly the Qball-X4 unmanned aerial vehicle. It is highly recommended to follow this guide particularly
QBALL-X4 QUICK START GUIDE A STEP BY STEP GUIDE TO FLY THE QBALL-X4 UAV This is a step by step guide to fly the Qball-X4 unmanned aerial vehicle. It is highly recommended to follow this guide particularly
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Ceilbot vision and mapping system
 Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
PHANTOM 4 Release Notes
 2017.09.12 Overview Remote Controller Firmware: v1.9.3.0 DJI GO 4 App ios: v4.1.10 DJI GO 4 App Android: v4.1.10 What s New Added support for Head Tracking function when connected with the DJI Goggles.
2017.09.12 Overview Remote Controller Firmware: v1.9.3.0 DJI GO 4 App ios: v4.1.10 DJI GO 4 App Android: v4.1.10 What s New Added support for Head Tracking function when connected with the DJI Goggles.
TG VR Gimbal User Manual V Accsoon. All Rights Reserved.
 TG20 360 VR Gimbal User Manual V1.0 20161209 www.accsoon.com E-mail: salse@accsoon.com 0 Disclaimers and Warnings Congratulations on purchasing you new VR Gimbal. Please read this manual and disclaimer
TG20 360 VR Gimbal User Manual V1.0 20161209 www.accsoon.com E-mail: salse@accsoon.com 0 Disclaimers and Warnings Congratulations on purchasing you new VR Gimbal. Please read this manual and disclaimer
ZENMUSE X5 User Manual
 ZENMUSE X5 User Manual 2015.11 V1.0 Searching for Keywords Search for keywords such as battery and install to find a topic. If you are using Adobe Acrobat Reader to read this document, press Ctrl+F on
ZENMUSE X5 User Manual 2015.11 V1.0 Searching for Keywords Search for keywords such as battery and install to find a topic. If you are using Adobe Acrobat Reader to read this document, press Ctrl+F on
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
UNIT - V PERSPECTIVE PROJECTION OF SIMPLE SOLIDS
 UNIT - V PERSPECTIVE PROJECTION OF SIMPLE SOLIDS Definitions 1. Perspective Projection is the graphic representation of an object on a single plane called Picture Plane (PP), as it appears to an observer.
UNIT - V PERSPECTIVE PROJECTION OF SIMPLE SOLIDS Definitions 1. Perspective Projection is the graphic representation of an object on a single plane called Picture Plane (PP), as it appears to an observer.
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
SketchUp. SketchUp. Google SketchUp. Using SketchUp. The Tool Set
 Google Google is a 3D Modelling program which specialises in making computer generated representations of real-world objects, especially architectural, mechanical and building components, such as windows,
Google Google is a 3D Modelling program which specialises in making computer generated representations of real-world objects, especially architectural, mechanical and building components, such as windows,
Image Composition System Using Multiple Mobile Robot Cameras
 Image Composition System Using Multiple Mobile Robot Cameras We have developed a high-precision video composition system which integrates a robotic camera able to move like a real cameraman with computer
Image Composition System Using Multiple Mobile Robot Cameras We have developed a high-precision video composition system which integrates a robotic camera able to move like a real cameraman with computer
Visual features detection based on deep neural network in autonomous driving tasks
 430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
REACH NEW HEIGHTS. Catalog 2015/2016 AEE.COM
 REACH NEW HEIGHTS Catalog 2015/2016 AEE.COM 1 OVERVIEW CAMS DRONES ACCESSORIES PROMO MATERIAL ABOUT AEE 6-15 16-21 22-29 30-31 32-33 AEE.COM DISCOVER THE UNBELIEVABLE WITH AEE 2 3 OVERVIEW OVERVIEW S90
REACH NEW HEIGHTS Catalog 2015/2016 AEE.COM 1 OVERVIEW CAMS DRONES ACCESSORIES PROMO MATERIAL ABOUT AEE 6-15 16-21 22-29 30-31 32-33 AEE.COM DISCOVER THE UNBELIEVABLE WITH AEE 2 3 OVERVIEW OVERVIEW S90
Three-Dimensional Viewing Hearn & Baker Chapter 7
 Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
The intelligent mapping & inspection drone
 The intelligent mapping & inspection drone 3 reasons to choose exom 1 flight, 3 types of imagery With exom you can switch between capturing video, still and thermal imagery during the same flight, without
The intelligent mapping & inspection drone 3 reasons to choose exom 1 flight, 3 types of imagery With exom you can switch between capturing video, still and thermal imagery during the same flight, without
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Geometry of Aerial photogrammetry. Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization)
") Geometry of Aerial photogrammetry Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization) Image formation - Recap The geometry of imaging system
Geometry of Aerial photogrammetry Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization) Image formation - Recap The geometry of imaging system
CANAL FOLLOWING USING AR DRONE IN SIMULATION
 CANAL FOLLOWING USING AR DRONE IN SIMULATION ENVIRONMENT Ali Ahmad, Ahmad Aneeque Khalid Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060006, 14060019}@lums.edu.pk
CANAL FOLLOWING USING AR DRONE IN SIMULATION ENVIRONMENT Ali Ahmad, Ahmad Aneeque Khalid Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060006, 14060019}@lums.edu.pk
Autofocus Modes. The focus and exposure can then be adjusted to fit that face no matter what portion of the picture it is in.
 Autofocus Modes Face detection The camera automatically detects the person s s face. The focus and exposure can then be adjusted to fit that face no matter what portion of the picture it is in. Multi-area
Autofocus Modes Face detection The camera automatically detects the person s s face. The focus and exposure can then be adjusted to fit that face no matter what portion of the picture it is in. Multi-area
Open Pit Mines. Terrestrial LiDAR and UAV Aerial Triangulation for. Figure 1: ILRIS at work
 Terrestrial LiDAR and UAV Aerial Triangulation for Open Pit Mines Figure 1: ILRIS at work Figure 2: Geo-Copter X-8000 taking off ay what you will about the past few years, it has produced some useful tools
Terrestrial LiDAR and UAV Aerial Triangulation for Open Pit Mines Figure 1: ILRIS at work Figure 2: Geo-Copter X-8000 taking off ay what you will about the past few years, it has produced some useful tools
Homework #1. Displays, Image Processing, Affine Transformations, Hierarchical Modeling
 Computer Graphics Instructor: Brian Curless CSE 457 Spring 215 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Thursday, April 9 th Due: Thursday, April
Computer Graphics Instructor: Brian Curless CSE 457 Spring 215 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Thursday, April 9 th Due: Thursday, April
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
CHAPTER 5 ARRAYS AND MATRICES. Copyright 2013 Pearson Education, Inc.
 CHAPTER 5 ARRAYS AND MATRICES One-Dimensional Arrays When solving engineering problems the data consist of just a single number, and some other times we have hundreds of numbers that need to be identified
CHAPTER 5 ARRAYS AND MATRICES One-Dimensional Arrays When solving engineering problems the data consist of just a single number, and some other times we have hundreds of numbers that need to be identified
arxiv: v1 [cs.cv] 18 Jun 2017
![arxiv: v1 [cs.cv] 18 Jun 2017](/thumbs/75/72105835.jpg "arxiv: v1 [cs.cv] 18 Jun 2017") Using Deep Networks for Drone Detection arxiv:1706.05726v1 [cs.cv] 18 Jun 2017 Cemal Aker, Sinan Kalkan KOVAN Research Lab. Computer Engineering, Middle East Technical University Ankara, Turkey Abstract
Using Deep Networks for Drone Detection arxiv:1706.05726v1 [cs.cv] 18 Jun 2017 Cemal Aker, Sinan Kalkan KOVAN Research Lab. Computer Engineering, Middle East Technical University Ankara, Turkey Abstract
BCC 3D Extruded Image Shatter Filter
 BCC 3D Extruded Image Shatter Filter 3D Extruded Image Shatter shatters the image in 3D space and disperses the image fragments. Unlike the 3D Image Shatter filter, this filter allows you to create threedimensional
BCC 3D Extruded Image Shatter Filter 3D Extruded Image Shatter shatters the image in 3D space and disperses the image fragments. Unlike the 3D Image Shatter filter, this filter allows you to create threedimensional
Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies
 ISSN: 2321-7782 (Online) e-isjn: A4372-3114 Impact Factor: 7.327 Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies Research Article
ISSN: 2321-7782 (Online) e-isjn: A4372-3114 Impact Factor: 7.327 Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies Research Article
Tutorial (Beginner level): Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (without Ground Control Points)
: Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (without Ground Control Points)") Tutorial (Beginner level): Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (without Ground Control Points) Overview Agisoft PhotoScan Professional allows to generate georeferenced dense point
Tutorial (Beginner level): Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (without Ground Control Points) Overview Agisoft PhotoScan Professional allows to generate georeferenced dense point