Stereo SLAM. Davide Migliore, PhD Department of Electronics and Information, Politecnico di Milano, Italy
|
|
|
- Evan Willis
- 6 years ago
- Views:
Transcription

1 Stereo SLAM, PhD Department of Electronics and Information, Politecnico di Milano, Italy
2 What is a Stereo Camera? Slide n 2 Do you remember the pin-hole camera?

3 What is a Stereo Camera? Slide n 3 Two cameras that perceive the world - Each camera has a P matrix

4 What is a Stereo Camera? Slide n 4 Two cameras that perceive the world

5 What is a Stereo Camera? Slide n 5 Two cameras that perceive the world


6 What is a Stereo Camera? Slide n 6 Two cameras that perceive the world
7 What is a Stereo Camera? Slide n 7 Error modeling problem
8 Stereo SLAM (Paz et al. 2008) Slide n 8 The idea - Use the Unified Inverse Depth parametrization (Montiel et al. 2006) - Rectify images and initialize the point using
9 Stereo SLAM (Paz et al. 2008) Slide n 9 Measurement Equations
10 Stereo SLAM (Paz et al. 2008) Slide n 10 Measurement Equations
 Slide n")
11 Stereo SLAM (Paz et al. 2008) Slide n 11
12 Classic EKF SLAM Slide n 12 PhD - migliore@elet.polimi.it
13 Classic EKF SLAM Slide n 12 Extended Kalman Filter Video Frame PhD - migliore@elet.polimi.it
14 Classic EKF SLAM Slide n 12 Extended Kalman Filter FD Feature Detection Feature Initialization Prediction Video Frame Update SLAM Filter PhD - migliore@elet.polimi.it
15 Classic EKF SLAM Slide n 12 Extended Kalman Filter FD Feature Detection Feature Initialization Prediction Video Frame Update SLAM Filter PhD - migliore@elet.polimi.it

16 Classic EKF SLAM Slide n 12 Extended Kalman Filter FD Feature Detection Feature Initialization Prediction Data Association Video Frame DA Update SLAM Filter PhD - migliore@elet.polimi.it
17 Classic EKF SLAM Slide n 12 Extended Kalman Filter FD Feature Detection Feature Initialization Prediction Data Association Video Frame DA Update SLAM Filter PhD - migliore@elet.polimi.it
18 Stereo SLAM (Paz et al. 2008) Slide n 13 Data Association Trouble
 Slide n 14 Data")
19 Stereo SLAM (Paz et al. 2008) Slide n 14 Data Association Trouble
 Slide n 15 Data")
20 Stereo SLAM (Paz et al. 2008) Slide n 15 Data Association Trouble
21 Compatibility Slide n 16

22 NN Data Association Slide n 17
23 NN Data Association Slide n 18
24 Joint Compatibility Slide n 19

25 JCBB Slide n 20
26 JCBB Slide n 21
27 Demo Time Slide n 22 Switch on Matlab
 Slide n 23 Joint Compatibility")
28 Stereo SLAM (Paz et al. 2008) Slide n 23 Joint Compatibility Branch & Bound Results
 Slide n 24")
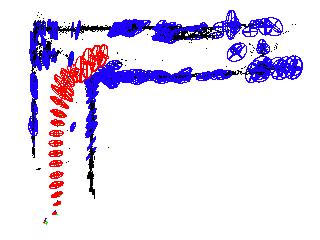
29 Stereo SLAM (Paz et al. 2008) Slide n 24 Results
30 Scaling problem Slide n 25
31 Scaling problem Slide n 26 O(n 2 )
32 Solution: local maps Slide n 27 Switch to matlab again
 Slide n 28")
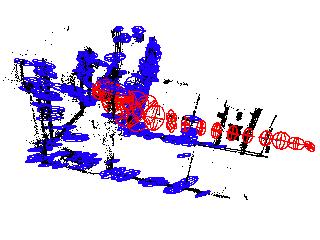
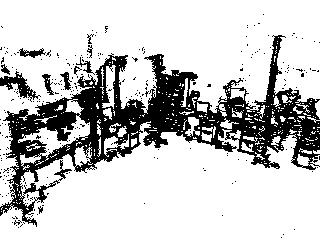
33 Stereo SLAM (Paz et al. 2008) Slide n 28 Results
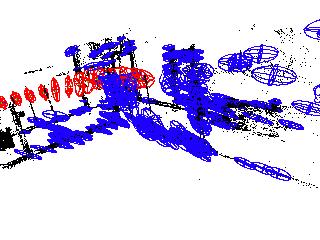
34 Stereo SLAM (Paz et al. 2008) Slide n 29 Results
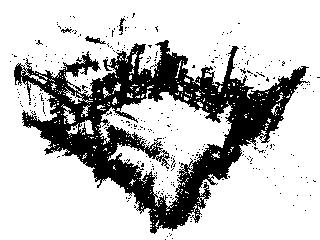
35 Stereo SLAM (Tomono 2009) Slide n 30 Results

")

36 Stereo SLAM (Tomono 2009) Slide n 30 Results

")



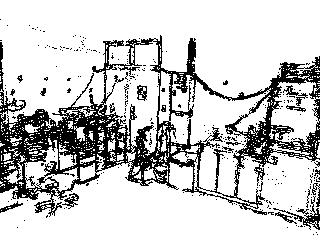
37 Stereo SLAM (Tomono 2009) Slide n 31 Results
38 Stereo SLAM (Tomono 2009) Slide n 32 Results
39 Inverse Scaling? Slide n 33 Is it possible to use the inverse scaling? Yes Results? Coming soon!!
40 Thanks for your attention Slide n 34 PhD - migliore@elet.polimi.it
41 Thanks for your attention Slide n 34 Questions PhD - migliore@elet.polimi.it
42 Omnidirectional SLAM, PhD Department of Electronics and Information, Politecnico di Milano, Italy


43 What is an Omni Camera? Slide n Omnidirectional sensors come in many varieties, but by definition must have a wide field-of-view. ~180º FOV ~360º FOV >180º FOV wide FOV dioptric cameras (e.g. fisheye) catadioptric cameras (e.g. cameras and mirror systems) polydioptric cameras (e.g. multiple overlapping cameras)
44 (Poly-)Dioptric solutions Slide n One to two fish-eye cameras or many synchornized cameras Pros: - High resolution per viewing angle Cons: - Bandwidth - Multiple cameras







45 (Poly-)Dioptric solutions Slide n One to two fish-eye cameras or many synchornized cameras Homebrewed polydioptric cameras are cheaper, but require calibrating and synchronizing; commercial designs tend to be expensive






46 Catadioptric solutions Slide n Usually single camera combined with convex mirror Pros: - Single image Cons: - Blind spots - Low resolution
47 Camera Models Slide n 40 Perspective camera Image plane (CCD) Single effective viewpoint
48 Camera Models Slide n 40 Perspective camera Image plane (CCD) Single effective viewpoint
49 Camera Models Slide n 40 Perspective camera Image plane (CCD) Single effective viewpoint
50 Camera Models Slide n 40 Perspective camera Image plane (CCD) Single effective viewpoint
51 Camera Models Slide n Catadioptric cameras
52 Camera Models Slide n Catadioptric cameras mirror
53 Camera Models Slide n Catadioptric cameras mirror perspective camera
54 Camera Models Slide n Catadioptric cameras mirror perspective camera
55 Camera Models Slide n Catadioptric cameras mirror perspective camera
56 Camera Models Slide n Catadioptric cameras mirror perspective camera
57 Camera Models Slide n Catadioptric cameras mirror perspective camera
58 Camera Models Slide n Central catadioptric cameras mirror camera
59 Camera Models Slide n Central catadioptric cameras mirror camera single effective viewpoint
 camera single effective")
60 Camera Models Slide n Central catadioptric cameras mirror (surface of revolution of a conic) camera single effective viewpoint
61 Types of central catadioptric cameras Slide n 43 F1 F2
62 Types of central catadioptric cameras Slide n 43 hyperbola + perspective camera F1 F2
63 Types of central catadioptric cameras Slide n 43 hyperbola + perspective camera parabola + orthographic lens F1 F1 F2
64 Types of central catadioptric cameras Slide n 43 hyperbola + perspective camera parabola + orthographic lens F1 F1 F2
65 Types of central catadioptric cameras Slide n 43 hyperbola + perspective camera parabola + orthographic lens F1 F1 F2

66 Types of central catadioptric cameras Slide n 43 hyperbola + perspective camera parabola + orthographic lens... F1 F1 F2
67 Other types of central cameras Slide n 44

68 Other types of central cameras Slide n 44
69 Why do we need calibration? Slide n 45 Z Y X p = v u
70 Why do we need calibration? Slide n 45 Calibration gives the relation between 2D & 3D Z For each pixel 3D vector emanating from the single viewpoint X Y p = u v
71 Why do we need calibration? Slide n 45 Calibration gives the relation between 2D & 3D Z For each pixel 3D vector emanating from the single viewpoint X Y p = u v
72 Why do we need calibration? Slide n 45 Calibration gives the relation between 2D & 3D Z For each pixel 3D vector emanating from the single viewpoint X Y p = u v
73 Why do we need calibration? Slide n 45 Calibration gives the relation between 2D & 3D Z For each pixel 3D vector emanating from the single viewpoint X Y p = u v

74 Why do we need calibration? Slide n 45 Calibration gives the relation between 2D & 3D Z For each pixel 3D vector emanating from the single viewpoint X Y p = u v
75 What? Slide n Z X Y u v
76 What? Slide n Center of the omnidirectional image Z X Y u v
77 What? Slide n Center of the omnidirectional image Camera focal length Z X Y v u Focal length
78 What? Slide n Center of the omnidirectional image Camera focal length Orientation and position between camera & mirror Z X Y R, T Focal length u v
79 What? Slide n Center of the omnidirectional image Camera focal length Orientation and position between camera & mirror Mirror shape Z X Y R, T Focal length u v
80 Assumptions Slide n Z X Y R, T u v Focal length
81 Assumptions Slide n 1. Mirror and camera axes are aligned => Z X Y R, T u v Focal length
82 Assumptions Slide n 1. Mirror and camera axes are aligned => Z X Y R, T u v Focal length
83 Assumptions Slide n 1. Mirror and camera axes are aligned => Z X Y 2. x-y mirror axes coincide with u-v camera axes => R, T u v Focal length
84 And how about non-central cameras? Slide n Reflected rays do not intersect in a point but are tangent to a caustic

85 And how about non-central cameras? Slide n Reflected rays do not intersect in a point but are tangent to a caustic

86 Visual Odometry (Scaramuzza et al. 2009) Slide n 49

87 Omni SFM (Lhuillier et al. 2008) Slide n 50

88 Omni SFM (Lhuillier et al. 2008) Slide n 51

89 Omni SFM (Lhuillier et al. 2008) Slide n 52
90 Thanks for your attention Slide n 53 PhD - migliore@elet.polimi.it


91 Thanks for your attention Slide n 53 Questions PhD - migliore@elet.polimi.it
Image formation. Thanks to Peter Corke and Chuck Dyer for the use of some slides
 Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
AP Physics: Curved Mirrors and Lenses
 The Ray Model of Light Light often travels in straight lines. We represent light using rays, which are straight lines emanating from an object. This is an idealization, but is very useful for geometric
The Ray Model of Light Light often travels in straight lines. We represent light using rays, which are straight lines emanating from an object. This is an idealization, but is very useful for geometric
CV: 3D to 2D mathematics. Perspective transformation; camera calibration; stereo computation; and more
 CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
Introduction to Autonomous Mobile Robots
 Introduction to Autonomous Mobile Robots i Contents vii Contents Acknowledgments xiii Preface xv 1 Introduction 1 1.1 Introduction 1 1.2 An Overview of the Book 11 2 Locomotion 13 2.1 Introduction 13 2.1.1
Introduction to Autonomous Mobile Robots i Contents vii Contents Acknowledgments xiii Preface xv 1 Introduction 1 1.1 Introduction 1 1.2 An Overview of the Book 11 2 Locomotion 13 2.1 Introduction 13 2.1.1
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Catadioptric camera model with conic mirror
 LÓPEZ-NICOLÁS, SAGÜÉS: CATADIOPTRIC CAMERA MODEL WITH CONIC MIRROR Catadioptric camera model with conic mirror G. López-Nicolás gonlopez@unizar.es C. Sagüés csagues@unizar.es Instituto de Investigación
LÓPEZ-NICOLÁS, SAGÜÉS: CATADIOPTRIC CAMERA MODEL WITH CONIC MIRROR Catadioptric camera model with conic mirror G. López-Nicolás gonlopez@unizar.es C. Sagüés csagues@unizar.es Instituto de Investigación
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Monitoring surrounding areas of truck-trailer combinations
 Monitoring surrounding areas of truck-trailer combinations Tobias Ehlgen 1 and Tomas Pajdla 2 1 Daimler-Chrysler Research and Technology, Ulm tobias.ehlgen@daimlerchrysler.com 2 Center of Machine Perception,
Monitoring surrounding areas of truck-trailer combinations Tobias Ehlgen 1 and Tomas Pajdla 2 1 Daimler-Chrysler Research and Technology, Ulm tobias.ehlgen@daimlerchrysler.com 2 Center of Machine Perception,
Motion estimation of unmanned marine vehicles Massimo Caccia
 Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it
Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
On the Use of Inverse Scaling in Monocular SLAM
 On the Use of Inverse Scaling in Monocular SLAM Daniele Marzorati 1, Matteo Matteucci 2, Davide Migliore 2, Domenico G. Sorrenti 1 1 Università degli Studi di Milano - Bicocca 2 Politecnico di Milano SLAM
On the Use of Inverse Scaling in Monocular SLAM Daniele Marzorati 1, Matteo Matteucci 2, Davide Migliore 2, Domenico G. Sorrenti 1 1 Università degli Studi di Milano - Bicocca 2 Politecnico di Milano SLAM
Sampling Site Close-Up Camera for Small Body Sample Return Mission
 Sampling Site Close-Up Camera for Small Body Sample Return Mission Naoko Ogawa *1 Hirohide Demura *2 Naru Hirata *2 Hajime Yano *1*3 Makoto Yoshikawa *1*3 *1 JAXA Space Exploration Center, JAXA *2 The
Sampling Site Close-Up Camera for Small Body Sample Return Mission Naoko Ogawa *1 Hirohide Demura *2 Naru Hirata *2 Hajime Yano *1*3 Makoto Yoshikawa *1*3 *1 JAXA Space Exploration Center, JAXA *2 The
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Structure from Small Baseline Motion with Central Panoramic Cameras
 Structure from Small Baseline Motion with Central Panoramic Cameras Omid Shakernia René Vidal Shankar Sastry Department of Electrical Engineering & Computer Sciences, UC Berkeley {omids,rvidal,sastry}@eecs.berkeley.edu
Structure from Small Baseline Motion with Central Panoramic Cameras Omid Shakernia René Vidal Shankar Sastry Department of Electrical Engineering & Computer Sciences, UC Berkeley {omids,rvidal,sastry}@eecs.berkeley.edu
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Pre-Calculus Guided Notes: Chapter 10 Conics. A circle is
 Name: Pre-Calculus Guided Notes: Chapter 10 Conics Section Circles A circle is _ Example 1 Write an equation for the circle with center (3, ) and radius 5. To do this, we ll need the x1 y y1 distance formula:
Name: Pre-Calculus Guided Notes: Chapter 10 Conics Section Circles A circle is _ Example 1 Write an equation for the circle with center (3, ) and radius 5. To do this, we ll need the x1 y y1 distance formula:
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Calibration of a Different Field-of-view Stereo Camera System using an Embedded Checkerboard Pattern
 Calibration of a Different Field-of-view Stereo Camera System using an Embedded Checkerboard Pattern Pathum Rathnayaka, Seung-Hae Baek and Soon-Yong Park School of Computer Science and Engineering, Kyungpook
Calibration of a Different Field-of-view Stereo Camera System using an Embedded Checkerboard Pattern Pathum Rathnayaka, Seung-Hae Baek and Soon-Yong Park School of Computer Science and Engineering, Kyungpook
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
A New Method and Toolbox for Easily Calibrating Omnidirectional Cameras
 A ew Method and Toolbox for Easily Calibrating Omnidirectional Cameras Davide Scaramuzza 1 and Roland Siegwart 1 1 Swiss Federal Institute of Technology Zurich (ETHZ) Autonomous Systems Lab, CLA-E, Tannenstrasse
A ew Method and Toolbox for Easily Calibrating Omnidirectional Cameras Davide Scaramuzza 1 and Roland Siegwart 1 1 Swiss Federal Institute of Technology Zurich (ETHZ) Autonomous Systems Lab, CLA-E, Tannenstrasse
Introduction to Computer Vision. Introduction CMPSCI 591A/691A CMPSCI 570/670. Image Formation
 Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
Math 155, Lecture Notes- Bonds
 Math 155, Lecture Notes- Bonds Name Section 10.1 Conics and Calculus In this section, we will study conic sections from a few different perspectives. We will consider the geometry-based idea that conics
Math 155, Lecture Notes- Bonds Name Section 10.1 Conics and Calculus In this section, we will study conic sections from a few different perspectives. We will consider the geometry-based idea that conics
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
A new approach for terrain description in mobile robots for humanitarian demining missions
 ABSTRACT A new approach for terrain description in mobile robots for humanitarian demining missions C. Salinas, M. Armada, P. Gonzalez de Santos Department of Automatic Control Industrial Automation Institute
ABSTRACT A new approach for terrain description in mobile robots for humanitarian demining missions C. Salinas, M. Armada, P. Gonzalez de Santos Department of Automatic Control Industrial Automation Institute
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Omni Stereo Vision of Cooperative Mobile Robots
 Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Precise Omnidirectional Camera Calibration
 Precise Omnidirectional Camera Calibration Dennis Strelow, Jeffrey Mishler, David Koes, and Sanjiv Singh Carnegie Mellon University {dstrelow, jmishler, dkoes, ssingh}@cs.cmu.edu Abstract Recent omnidirectional
Precise Omnidirectional Camera Calibration Dennis Strelow, Jeffrey Mishler, David Koes, and Sanjiv Singh Carnegie Mellon University {dstrelow, jmishler, dkoes, ssingh}@cs.cmu.edu Abstract Recent omnidirectional
ALGEBRA II UNIT X: Conic Sections Unit Notes Packet
 Name: Period: ALGEBRA II UNIT X: Conic Sections Unit Notes Packet Algebra II Unit 10 Plan: This plan is subject to change at the teacher s discretion. Section Topic Formative Work Due Date 10.3 Circles
Name: Period: ALGEBRA II UNIT X: Conic Sections Unit Notes Packet Algebra II Unit 10 Plan: This plan is subject to change at the teacher s discretion. Section Topic Formative Work Due Date 10.3 Circles
Understanding Variability
 Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little
 Se, Lowe, and Little") SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
arxiv:cs/ v1 [cs.cv] 24 Mar 2003
![arxiv:cs/ v1 [cs.cv] 24 Mar 2003](/thumbs/86/93082437.jpg "arxiv:cs/ v1 [cs.cv] 24 Mar 2003") Differential Methods in Catadioptric Sensor Design with Applications to Panoramic Imaging Technical Report arxiv:cs/0303024v1 [cs.cv] 24 Mar 2003 R. Andrew Hicks Department of Mathematics Drexel University
Differential Methods in Catadioptric Sensor Design with Applications to Panoramic Imaging Technical Report arxiv:cs/0303024v1 [cs.cv] 24 Mar 2003 R. Andrew Hicks Department of Mathematics Drexel University
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Field of View (Zoom)
") Image Projection Field of View (Zoom) Large Focal Length compresses depth 400 mm 200 mm 100 mm 50 mm 28 mm 17 mm 1995-2005 Michael Reichmann FOV depends of Focal Length f f Smaller FOV = larger Focal
Image Projection Field of View (Zoom) Large Focal Length compresses depth 400 mm 200 mm 100 mm 50 mm 28 mm 17 mm 1995-2005 Michael Reichmann FOV depends of Focal Length f f Smaller FOV = larger Focal
Conic Sections. College Algebra
 Conic Sections College Algebra Conic Sections A conic section, or conic, is a shape resulting from intersecting a right circular cone with a plane. The angle at which the plane intersects the cone determines
Conic Sections College Algebra Conic Sections A conic section, or conic, is a shape resulting from intersecting a right circular cone with a plane. The angle at which the plane intersects the cone determines
Stereo with Mirrors*
 Stereo with Mirrors* Sameer A. Nene and Shree K. Nayar Department of Computer Science Columbia University New York, NY 10027 Abstract In this paper, we propose the use of mirrors and a single camera for
Stereo with Mirrors* Sameer A. Nene and Shree K. Nayar Department of Computer Science Columbia University New York, NY 10027 Abstract In this paper, we propose the use of mirrors and a single camera for
LET S FOCUS ON FOCUSING
 LET S FOCUS ON FOCUSING How A Lens Works The distance between the center of the lens and the focal point is called the FOCAL LENGTH. Images are only sharp where the focal plane meets the focal point. To
LET S FOCUS ON FOCUSING How A Lens Works The distance between the center of the lens and the focal point is called the FOCAL LENGTH. Images are only sharp where the focal plane meets the focal point. To
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
On the Calibration of Non Single Viewpoint Catadioptric Sensors
 On the Calibration of Non Single Viewpoint Catadioptric Sensors Alberto Colombo 1, Matteo Matteucci 2, and Domenico G. Sorrenti 1 1 Università degli Studi di Milano Bicocca, Dipartimento di Informatica,
On the Calibration of Non Single Viewpoint Catadioptric Sensors Alberto Colombo 1, Matteo Matteucci 2, and Domenico G. Sorrenti 1 1 Università degli Studi di Milano Bicocca, Dipartimento di Informatica,
Remote Reality Demonstration
 Remote Reality Demonstration Terrance E. Boult EECS Dept., 19 Memorial Drive West Lehigh Univ., Bethlehem, PA 18015 tboult@eecs.lehigh.edu Fax: 610 758 6279 Contact Author: T.Boult Submission category:
Remote Reality Demonstration Terrance E. Boult EECS Dept., 19 Memorial Drive West Lehigh Univ., Bethlehem, PA 18015 tboult@eecs.lehigh.edu Fax: 610 758 6279 Contact Author: T.Boult Submission category:
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Calibration between a Central Catadioptric Camera and a Laser Range Finder for Robotic Applications
 Calibration between a Central Catadioptric and a for Robotic Applications Christopher Mei and Patrick Rives INRIA, 4 Route des Lucioles - BP 93, 69 Sophia-Antipolis, Cedex - France {christopher.mei, patrick.rives}@sophia.inria.fr
Calibration between a Central Catadioptric and a for Robotic Applications Christopher Mei and Patrick Rives INRIA, 4 Route des Lucioles - BP 93, 69 Sophia-Antipolis, Cedex - France {christopher.mei, patrick.rives}@sophia.inria.fr
Uncalibrated Video Compass for Mobile Robots from Paracatadioptric Line Images
 Uncalibrated Video Compass for Mobile Robots from Paracatadioptric Line Images Gian Luca Mariottini and Domenico Prattichizzo Dipartimento di Ingegneria dell Informazione Università di Siena Via Roma 56,
Uncalibrated Video Compass for Mobile Robots from Paracatadioptric Line Images Gian Luca Mariottini and Domenico Prattichizzo Dipartimento di Ingegneria dell Informazione Università di Siena Via Roma 56,
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
GEOMETRY OF CURVES CHAPMAN & HALL/CRC. Boca Raton London New York Washington, D.C.
 GEOMETRY OF CURVES JOHN W. RUTTER CHAPMAN & HALL/CRC Boca Raton London New York Washington, D.C. Contents Introduction 0.1 Cartesian coordinates 0.2 Polar coordinates 0.3 The Argand diagram 0.4 Polar equations
GEOMETRY OF CURVES JOHN W. RUTTER CHAPMAN & HALL/CRC Boca Raton London New York Washington, D.C. Contents Introduction 0.1 Cartesian coordinates 0.2 Polar coordinates 0.3 The Argand diagram 0.4 Polar equations
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Visual Tracking of Planes with an Uncalibrated Central Catadioptric Camera
 The 29 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 29 St. Louis, USA Visual Tracking of Planes with an Uncalibrated Central Catadioptric Camera A. Salazar-Garibay,
The 29 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 29 St. Louis, USA Visual Tracking of Planes with an Uncalibrated Central Catadioptric Camera A. Salazar-Garibay,
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
Chapter 12 3D Localisation and High-Level Processing
 Chapter 12 3D Localisation and High-Level Processing This chapter describes how the results obtained from the moving object tracking phase are used for estimating the 3D location of objects, based on the
Chapter 12 3D Localisation and High-Level Processing This chapter describes how the results obtained from the moving object tracking phase are used for estimating the 3D location of objects, based on the
Computer Vision Project-1
 University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
Generic and Real-Time Structure from Motion
 Generic and Real-Time Structure from Motion E. Mouragnon 1,2, M. Lhuillier 1, M. Dhome 1, F. Dekeyser 2 and P. Sayd 2 1 LASMEA UMR 6602, Université Blaise Pascal/CNRS, 63177 Aubière Cedex, France 2 CEA,
Generic and Real-Time Structure from Motion E. Mouragnon 1,2, M. Lhuillier 1, M. Dhome 1, F. Dekeyser 2 and P. Sayd 2 1 LASMEA UMR 6602, Université Blaise Pascal/CNRS, 63177 Aubière Cedex, France 2 CEA,
ECE-161C Cameras. Nuno Vasconcelos ECE Department, UCSD
 ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
A Computer Vision Sensor for Panoramic Depth Perception
 A Computer Vision Sensor for Panoramic Depth Perception Radu Orghidan 1, El Mustapha Mouaddib 2, and Joaquim Salvi 1 1 Institute of Informatics and Applications, Computer Vision and Robotics Group University
A Computer Vision Sensor for Panoramic Depth Perception Radu Orghidan 1, El Mustapha Mouaddib 2, and Joaquim Salvi 1 1 Institute of Informatics and Applications, Computer Vision and Robotics Group University
Ray Tracing I. History
 History Ray Tracing came from the Physics of lens making. The process was that of drawing lines or rays through a glass shape to determine it s lens properties. It is also related to early perspective
History Ray Tracing came from the Physics of lens making. The process was that of drawing lines or rays through a glass shape to determine it s lens properties. It is also related to early perspective
Probabilistic 2D Acoustic Source Localization Using Direction of Arrivals in Robot Sensor Networks
 Probabilistic 2D Acoustic Source Localization Using Direction of Arrivals in Robot Sensor Networks Riccardo Levorato and Enrico Pagello Department of Information Engineering, University of Padova, Italy
Probabilistic 2D Acoustic Source Localization Using Direction of Arrivals in Robot Sensor Networks Riccardo Levorato and Enrico Pagello Department of Information Engineering, University of Padova, Italy
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
CS 563 Advanced Topics in Computer Graphics Camera Models. by Kevin Kardian
 CS 563 Advanced Topics in Computer Graphics Camera Models by Kevin Kardian Introduction Pinhole camera is insufficient Everything in perfect focus Less realistic Different camera models are possible Create
CS 563 Advanced Topics in Computer Graphics Camera Models by Kevin Kardian Introduction Pinhole camera is insufficient Everything in perfect focus Less realistic Different camera models are possible Create
Omni Flow. Libor Spacek Department of Computer Science University of Essex, Colchester, CO4 3SQ, UK. Abstract. 1. Introduction
 Omni Flow Libor Spacek Department of Computer Science University of Essex, Colchester, CO4 3SQ, UK. Abstract Catadioptric omnidirectional sensors (catadioptric cameras) capture instantaneous images with
Omni Flow Libor Spacek Department of Computer Science University of Essex, Colchester, CO4 3SQ, UK. Abstract Catadioptric omnidirectional sensors (catadioptric cameras) capture instantaneous images with
Waves & Oscillations
 Physics 42200 Waves & Oscillations Lecture 26 Propagation of Light Hecht, chapter 5 Spring 2015 Semester Matthew Jones Geometric Optics Typical problems in geometric optics: Given an optical system, what
Physics 42200 Waves & Oscillations Lecture 26 Propagation of Light Hecht, chapter 5 Spring 2015 Semester Matthew Jones Geometric Optics Typical problems in geometric optics: Given an optical system, what
Conic Sections: Parabolas
 Conic Sections: Parabolas Why are the graphs of parabolas, ellipses, and hyperbolas called 'conic sections'? Because if you pass a plane through a double cone, the intersection of the plane and the cone
Conic Sections: Parabolas Why are the graphs of parabolas, ellipses, and hyperbolas called 'conic sections'? Because if you pass a plane through a double cone, the intersection of the plane and the cone
COMP30019 Graphics and Interaction Perspective & Polygonal Geometry
 COMP30019 Graphics and Interaction Perspective & Polygonal Geometry Department of Computing and Information Systems The Lecture outline Introduction Perspective Geometry Virtual camera Centre of projection
COMP30019 Graphics and Interaction Perspective & Polygonal Geometry Department of Computing and Information Systems The Lecture outline Introduction Perspective Geometry Virtual camera Centre of projection
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein. Lecture 23: Photometric Stereo
 CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
Mid-Chapter Quiz: Lessons 7-1 through 7-3
 Write an equation for and graph a parabola with the given focus F and vertex V 1. F(1, 5), V(1, 3) Because the focus and vertex share the same x coordinate, the graph is vertical. The focus is (h, k +
Write an equation for and graph a parabola with the given focus F and vertex V 1. F(1, 5), V(1, 3) Because the focus and vertex share the same x coordinate, the graph is vertical. The focus is (h, k +
Light, Photons, and MRI
 Light, Photons, and MRI When light hits an object, some of it will be reflected. The reflected light can form an image. We usually want to be able to characterize the image given what we know about the
Light, Photons, and MRI When light hits an object, some of it will be reflected. The reflected light can form an image. We usually want to be able to characterize the image given what we know about the
Humanoid Robotics. Least Squares. Maren Bennewitz
 Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Name: Class: Date: Conics Multiple Choice Pre-Test. Multiple Choice Identify the choice that best completes the statement or answers the question.
 Name: Class: Date: Conics Multiple Choice Pre-Test Multiple Choice Identify the choice that best completes the statement or answers the question. 1 Graph the equation x 2 + y 2 = 36. Then describe the
Name: Class: Date: Conics Multiple Choice Pre-Test Multiple Choice Identify the choice that best completes the statement or answers the question. 1 Graph the equation x 2 + y 2 = 36. Then describe the
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Cameras and Radiometry. Last lecture in a nutshell. Conversion Euclidean -> Homogenous -> Euclidean. Affine Camera Model. Simplified Camera Models
 Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
Light: Geometric Optics
 Light: Geometric Optics 23.1 The Ray Model of Light Light very often travels in straight lines. We represent light using rays, which are straight lines emanating from an object. This is an idealization,
Light: Geometric Optics 23.1 The Ray Model of Light Light very often travels in straight lines. We represent light using rays, which are straight lines emanating from an object. This is an idealization,
CSCI 5980: Assignment #3 Homography
 Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Image Formation I Chapter 2 (R. Szelisky)
") Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Estimation of Camera Motion with Feature Flow Model for 3D Environment Modeling by Using Omni-Directional Camera
 Estimation of Camera Motion with Feature Flow Model for 3D Environment Modeling by Using Omni-Directional Camera Ryosuke Kawanishi, Atsushi Yamashita and Toru Kaneko Abstract Map information is important
Estimation of Camera Motion with Feature Flow Model for 3D Environment Modeling by Using Omni-Directional Camera Ryosuke Kawanishi, Atsushi Yamashita and Toru Kaneko Abstract Map information is important
Degeneracy of the Linear Seventeen-Point Algorithm for Generalized Essential Matrix
 J Math Imaging Vis 00 37: 40-48 DOI 0007/s085-00-09-9 Authors s version The final publication is available at wwwspringerlinkcom Degeneracy of the Linear Seventeen-Point Algorithm for Generalized Essential
J Math Imaging Vis 00 37: 40-48 DOI 0007/s085-00-09-9 Authors s version The final publication is available at wwwspringerlinkcom Degeneracy of the Linear Seventeen-Point Algorithm for Generalized Essential
Multi-View Omni-Directional Imaging
 Multi-View Omni-Directional Imaging Tuesday, December 19, 2000 Moshe Ben-Ezra, Shmuel Peleg Abstract This paper describes a novel camera design or the creation o multiple panoramic images, such that each
Multi-View Omni-Directional Imaging Tuesday, December 19, 2000 Moshe Ben-Ezra, Shmuel Peleg Abstract This paper describes a novel camera design or the creation o multiple panoramic images, such that each
Stereo Observation Models
 Stereo Observation Models Gabe Sibley June 16, 2003 Abstract This technical report describes general stereo vision triangulation and linearized error modeling. 0.1 Standard Model Equations If the relative
Stereo Observation Models Gabe Sibley June 16, 2003 Abstract This technical report describes general stereo vision triangulation and linearized error modeling. 0.1 Standard Model Equations If the relative
Towards a visual perception system for LNG pipe inspection
 Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Ray Tracing I. Internet Raytracing Competition
 History Ray Tracing came from the Physics of lens making. The process was that of drawing lines or rays through a glass shape to determine it s lens properties. It is also related to early perspective
History Ray Tracing came from the Physics of lens making. The process was that of drawing lines or rays through a glass shape to determine it s lens properties. It is also related to early perspective
Equi-areal Catadioptric Sensors
 Equi-areal Catadioptric Sensors R. Anew Hicks Ronald K. Perline Department of Mathematics and Computer Science Drexel University Philadelphia, PA 904 ahicks, rperline @mcs.exel.edu Abstract A prominent
Equi-areal Catadioptric Sensors R. Anew Hicks Ronald K. Perline Department of Mathematics and Computer Science Drexel University Philadelphia, PA 904 ahicks, rperline @mcs.exel.edu Abstract A prominent
Perception II: Pinhole camera and Stereo Vision
 Perception II: Pinhole camera and Stereo Vision Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Mobile Robot Control Scheme knowledge, data base mission commands Localization
Perception II: Pinhole camera and Stereo Vision Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Mobile Robot Control Scheme knowledge, data base mission commands Localization
Robotics - Projective Geometry and Camera model. Marcello Restelli
 Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Image Warping and Mosacing
 Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment