A Visual Programming Environment for Machine Vision Engineers. Paul F Whelan
|
|
|
- Sherman Copeland
- 5 years ago
- Views:
Transcription
1 A Visual Programming Environment for Machine Vision Engineers Paul F Whelan Vision Systems Group School of Electronic Engineering, Dublin City University, Dublin 9, Ireland. Ph: Fax: paul.whelan@eeng.dcu.ie and Robert Sadleir Vision Systems Group School of Electronic Engineering, Dublin City University, Dublin 9, Ireland. Ph: Fax: robert.sadleir@dcu.ie July 2004
2 A Visual Programming Environment for Machine Vision Engineers Abstract: This paper will detail a free image analysis and software development environment for machine vision application development. The environment provides high-level access to over 300 image manipulation, processing and analysis algorithms through a well-defined and easy to use graphical interface. Users can extend the core library using the developer s interface via a plug-in which features automatic source code generation, compilation with full error feedback and dynamic algorithm updates. The paper will also discuss key issues associated with the environment and outline the advantages in adopting such a system for machine vision application development. Keywords: Machine Vision, Image Analysis, Visual Programming, Development Environment. Introduction For many novices to the world of machine vision, the development of automated vision solutions may seem a relatively easy task as it only requires a computer to understand basic elements such as shape, colour and texture? Of course this is not the case. Extracting useful information from images is a difficult task and as such requires a flexible machine vision application development environment. The visual programming environment outlined in this paper (called NeatVision) is one such system (NeatVision, 2004). It aims to provide novice and experienced machine vision engineer s with access to a Java based multi-platform development system. The
3 NeatVision environment provides an intuitive interface which is achieved using a drag and drop block diagram approach. Each image processing operation is represented by a graphical block with inputs and outputs that can be interconnected, edited and deleted as required. NeatVision (Version 2.0) is available free of charge and can be downloaded directly via the Internet (NeatVision, 2004) NeatVision: An Interactive Development Environment NeatVision is just one example of a visual programming development environment for machine vision, other notable examples include commercial programmes such as Khoros (Khoros, 2004) and WiT (Wit, 2004). Visual programming involves defining variables, specifying operations, which are to be performed on these variables and their derivatives in order to perform a specific task. This is achieved by creating a structured flow of data using branching, looping and conditional processing. Traditionally computer programs have been written using textual programming languages. Quiet often such programmes process data in a complex fashion leading to a situation whereby the data paths and the overall structure of the program cannot be easily identified from the textual description. This can make it very difficult to appreciate the relationship between the source code and the functionality that it represents. Although the programmer specifies the data flow in a visual program, the order in which the components execute is defined by the availability of data. Conditional processing concepts are supported in the visual domain by using dedicated flow control components. The main disadvantages of existing visual programming environments includes their cost, lack of cross platform support and the fact that many of them tend to be focused on image processing rather than image
4 analysis applications (the latter must be considered a key element of any practical machine vision application). Text based programming languages such as MATLAB (Matlab, 2004) can be a powerful alternative to visual programming. In addition to the disadvantages outlined with respect to the visual programming languages, text based approaches require the user to have a higher level of programming skills when compared to visual programming environments. Text based interactive environments are generally more suitable to experienced users, in fact experienced users can become frustrated by the visual programming environment as complex programmes can take longer to develop. Hence our aim is to produce a suitable environment for those new to machine vision while retaining the flexibility of program design for the more experienced users. Based on our review of exiting text and visual programming based machine vision development environments, the key criteria necessary are outlined below: Multi-platform: The development environment must be able to run on a wide range of computer platforms. Focused on machine vision engineering: The environment should contain a wide range of image processing and analysis techniques necessary to implement practical machine vision engineering applications. Easy to use: It should allow users to concentrate on the design of machine vision solutions, as opposed to emphasizing the programming task. Upgradeable: The environment must contain a mechanism to allow users to develop custom vision modules.
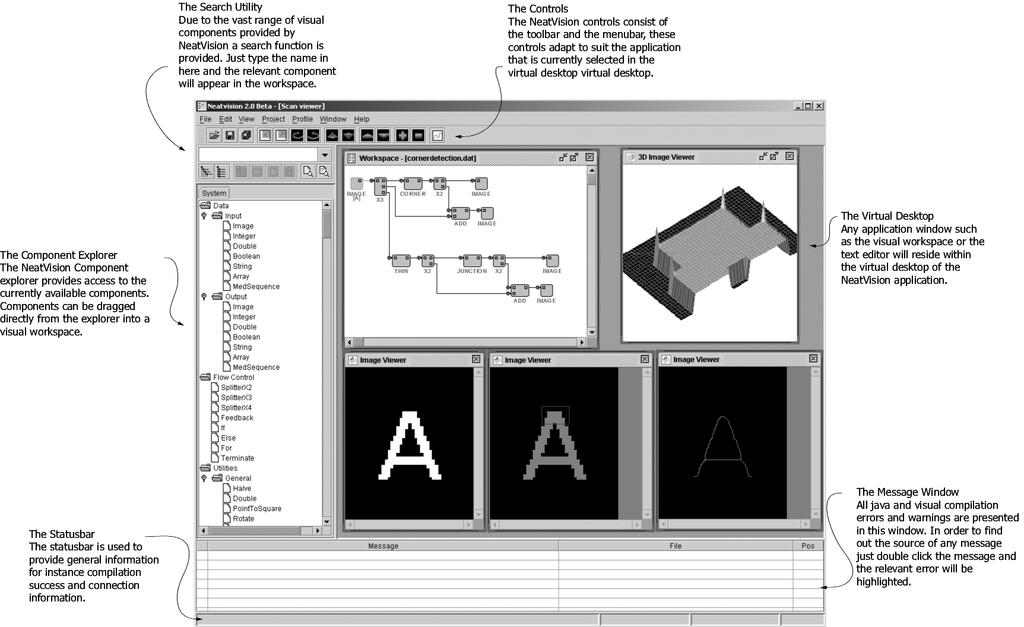
5 A visual program can be created by defining input data using the input components, then implementing the desired algorithm using the processing and flow control components. The data flow is specified by creating interconnections between the components. The program can be completed by adding output components to view the data resulting from the algorithm execution. Details on the design of the NeatVision development environment appear elsewhere (Whelan and Molloy, 2000). NeatVisions Graphical User Interface (GUI) The NeatVision GUI (Figure 1) consists primarily of a workspace where the processing blocks reside. The processing blocks represent the functionality available to the user. Support is provided for the positioning of blocks around the workspace, the creation and registration of interconnections between blocks. The lines connecting each block represent the path of the data through the system. Some of the blocks can generate child windows, which can be used for viewing outputs, setting parameters or selecting areas of interest from an image. If each block is thought of as a function, then the application can be thought of as a visual programming language. The inputs to each block correspond to the arguments of a function and the outputs from a block correspond to the return values. The advantage of this approach is that a block can return more than one value without the added complexity of using C-style pointers. In addition, the path of data through a visual program can be dictated using special flow control components. A visual program can range in complexity from three components upwards and is limited only by the availability of free memory.
6 As each block is processed it is highlighted (in green) to illustrate that it is active. This allows users to see the relevant speeds of each segment of the parallel data streams within a visual program. This can help identify potential processing bottlenecks within the workspace allowing for a more efficient balanced design. The colour coding of the blocks data connection type and its status also aids in the design process. To aid user operation each data connection has two colour coded properties, namely the block data type and connection status. NeatVision currently supports eight data types, i.e. Image (red), Integer / Array data (green), Double precision Floating point data (blue), Boolean data (orange), String data (pink), Fourier data (light blue), Coordinate data (purple) and Undefined data (black). The other connection property relates to its status. There are three main states for a connection, connected (green), disconnected (red) and disconnected but using default value (orange). This approach provides a fast and simple alternative to conventional text based programming, while still providing much of the power and flexibility. The visual workspace can be compiled and executed as with a conventional programming language. Errors and warnings are generated depending on the situation. There is currently support for 13 input graphics file formats and 11 output formats. System parameters can be adjusted and the system may be reset and executed again until the desired response is obtained. At any stage blocks may be added or removed from the system. NeatVision also contains a built in web browser to allow easy access to online notes and support tools.
7 Figure 1: Key features of the NeatVision environment. Design Details NeatVision is designed to work at two levels. The user level allows the design of imaging solutions within the visual programming environment using NeatVision's core set of functions. NeatVision (Version 2.0) contains 300 image manipulation, processing and analysis functions, ranging from pixel manipulation to colour image analysis to data visualisation. To aid novice users, a full introductory tutorial and some sample programmes can be found on the NeatVision website. A brief description of the main system components is given below: Data types: Image, integer, double, string, Boolean, array, medical image sequences. Flow control: Path splitting, feedback, if (else), for loop.
8 Utilities: Rotation, pixel manipulation, resize, URL control, additive noise generators, region of interest, masking operations. Arithmetic operators: Add, subtract, multiply, divide, logical operators. Histogram: General histogram analysis algorithms, local equalization. Image Processing: Look-up tables (LUT), threshold, contrast manipulation. Neighborhood based filtering: Lowpass, median, sharpen, DOLPS, convolution. Edge detection: Roberts, Laplacian, Sobel, zero crossing, Canny Edge features: Line/arc fitting, edge labelling and linking. Analysis: Thinning, binary detection, blob analysis, labelling, shape feature measures, bounding regions, grey scale corner detectors. Clustering: K-means (grey scale and colour), unsupervised colour clustering. Image transforms: Hough (line and circle), Medial Axis, DCT, Cooccurrance, Fourier, distance transforms. Morphology: Several morphological operators, including erosion, dilation, opening, closing, top-hat, hit-and-miss, watershed. Colour: Colour space conversion algorithms, RGB, HSI, XYZ, YIQ, Lab. 3D Volume: 3D Operators (thinning, Sobel, threshold, labelling), intensity projections, rendering engine (wire frame, flat, Gouraud, Phong). Low Level: Pixel level operators; get pixel value, set pixel value and basic shape generation. String: String operators, object addition, to upper case and to lower case. Maths: An extensive range of numerical operators and utilities, including constants and random number generation.
9 JAI Colour: Colour algorithms implemented using JAI (Java Advance Imaging (JAI, 2003)), operators, processing, filters and edge detectors. At the more advanced developers level, NeatVision allows experienced machine vision engineers to develop and integrate their own functionality (Figure 2) through the development and integration of new image processing/analysis modules. Readers should refer to the online NeatVision developers guide for more details on developing and integrating custom machine vision applications (DevGuide, 2004). (a) (b) (c) Figure 2: NeatVision component development wizard. (a) Select Add New Component from the popup menu of the user area of the component explorer. (b) Select component to be added. (c) Define the component skeleton (i.e. the number and
10 type of inputs and outputs for the associate block). This generates the necessary component wrapping code. Sample Applications NeatVision provides an image analysis software development environment that can work at several levels. For example, at a relatively low level individual pixels can be manipulated. Alternatively, NeatVision's built in functionality can be used to generate solutions to complex machine vision problems. This section outlines two basic sample applications, beginning with a simple morphological based task. Figure 3 illustrates how the reconstruction by dilation morphological operator can be used to remove or detect objects that are touching the binary image border. This would be typically used in microscopic imaging analysis (such as microstructure or cell counting applications) whereby we are only interested in objects within the field of view that do not touch the boundary. Figure 4 illustrates how NeatVision can be used to isolate defects in the center panel of a crown bottle top. The basic approach outlined here involves threholding the image prior to removing any isolated pixels. The largest blob (white connected region) is then isolated prior to erosion to remove edge artefacts. The convex hulls bay regions are then isolated and eroded (again to remove unwanted edge artefacts) prior to incorporation into the original image.
11 (a) (b) (c) (d) Figure 3: Removal of boundary objects using reconstruction by dilation. (a) Original image. (b) Boundary object removal. (c) Detected boundary objects. (d) Associated visual workspace.
12 (a) (b) (c) Figure 4: Bottle top inspection. (a) Input image. (b) Output image in which the defects are highlighted in white. (c) The NeatVision visual program. Conclusions While there is more to the design of a commercial machine vision system than the algorithmic development process (i.e. sensor, lighting and mechanical interface issues are equally important design tasks), a tool such as NeatVision has key advantages during the initial research stages. By using the built in functionality of NeatVision, it removes the requirement for the design engineer to develop custom code just to evaluate a potential algorithmic approach. Similarly the open cross-platform environment presented by this package makes it ideal for the teaching and exchange of ideas in a machine vision educational setting. The cross-platform nature of
13 NeatVision is especially convenient in the online educational environment, as it does not tie the user to a specific computing platform. One of the authors (PFW) has been successfully using earlier versions of NeatVision since 1995 is such an online educational role, where it has formed the main design platform for an online postgraduate and continuing educational programme in machine vision (EE544 (2004), Whelan (1997)). In summary, NeatVision was designed to allow novice and experienced users to focus on the machine vision design task rather than concerns about the subtlety of a given programming language. It allows machine vision engineers to implement their ideas in a dynamic and straightforward manner. NeatVision standard and developers versions are freely available via the Internet and are capable of running on a wide range of computer platforms (e.g. Windows, Solaris, Linux).
14 References NeatVision (2004), "NeatVision: Image Analysis and Software Development Environment", Available (MARCH) Khoros (2004), "Khoros: Khoral Research, Inc", Available (MARCH) WiT (2004), "WiT: Logical Vision", Available (MARCH) Matlab (2004), "MathWorks: Matlab", Available (MARCH) Whelan, P.F. and Molloy, D (2000), "Machine Vision Algorithms in Java: Techniques and Implementation", Springer-Verlag, London JAI (2004), "The Java Advanced Imaging (API)", Available (MARCH) DevGuide (2004), "NeatVision: Developers Guide", Available (MARCH)
15 EE544 (2004), "EE544: Computer and Machine Vision", Available (MARCH) Whelan, P.F. (1997), "Remote access to continuing engineering education - RACeE", IEE Engineering Science and Education Journal, 6(5), pp
16 Diagrams
17
18
19
20

21
NeatVision: A Development Environment for Machine Vision Engineers
 $ NeatVision: A Development Environment for Machine Vision Engineers By Paul F. Whelan, Robert Sadleir & Ovidiu Ghita 1 Abstract: This Chapter will detail a free image analysis development environment
$ NeatVision: A Development Environment for Machine Vision Engineers By Paul F. Whelan, Robert Sadleir & Ovidiu Ghita 1 Abstract: This Chapter will detail a free image analysis development environment
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
Keywords: Thresholding, Morphological operations, Image filtering, Adaptive histogram equalization, Ceramic tile.
 Volume 3, Issue 7, July 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Blobs and Cracks
Volume 3, Issue 7, July 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Blobs and Cracks
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
SECTION 5 IMAGE PROCESSING 2
 SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Biomedical Image Analysis. Mathematical Morphology
 Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
Albert M. Vossepoel. Center for Image Processing
 Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course:
Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course:
Detection of Edges Using Mathematical Morphological Operators
 OPEN TRANSACTIONS ON INFORMATION PROCESSING Volume 1, Number 1, MAY 2014 OPEN TRANSACTIONS ON INFORMATION PROCESSING Detection of Edges Using Mathematical Morphological Operators Suman Rani*, Deepti Bansal,
OPEN TRANSACTIONS ON INFORMATION PROCESSING Volume 1, Number 1, MAY 2014 OPEN TRANSACTIONS ON INFORMATION PROCESSING Detection of Edges Using Mathematical Morphological Operators Suman Rani*, Deepti Bansal,
Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Morphological Image Processing
 Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Morphological Image Processing
 Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Sobel Edge Detection Algorithm
 Sobel Edge Detection Algorithm Samta Gupta 1, Susmita Ghosh Mazumdar 2 1 M. Tech Student, Department of Electronics & Telecom, RCET, CSVTU Bhilai, India 2 Reader, Department of Electronics & Telecom, RCET,
Sobel Edge Detection Algorithm Samta Gupta 1, Susmita Ghosh Mazumdar 2 1 M. Tech Student, Department of Electronics & Telecom, RCET, CSVTU Bhilai, India 2 Reader, Department of Electronics & Telecom, RCET,
 DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
Morphological Image Processing GUI using MATLAB
 Trends Journal of Sciences Research (2015) 2(3):90-94 http://www.tjsr.org Morphological Image Processing GUI using MATLAB INTRODUCTION A digital image is a representation of twodimensional images as a
Trends Journal of Sciences Research (2015) 2(3):90-94 http://www.tjsr.org Morphological Image Processing GUI using MATLAB INTRODUCTION A digital image is a representation of twodimensional images as a
Introduction. Computer Vision & Digital Image Processing. Preview. Basic Concepts from Set Theory
 Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
Extraction and Recognition of Alphanumeric Characters from Vehicle Number Plate
 Extraction and Recognition of Alphanumeric Characters from Vehicle Number Plate Surekha.R.Gondkar 1, C.S Mala 2, Alina Susan George 3, Beauty Pandey 4, Megha H.V 5 Associate Professor, Department of Telecommunication
Extraction and Recognition of Alphanumeric Characters from Vehicle Number Plate Surekha.R.Gondkar 1, C.S Mala 2, Alina Susan George 3, Beauty Pandey 4, Megha H.V 5 Associate Professor, Department of Telecommunication
2: Image Display and Digital Images. EE547 Computer Vision: Lecture Slides. 2: Digital Images. 1. Introduction: EE547 Computer Vision
 EE547 Computer Vision: Lecture Slides Anthony P. Reeves November 24, 1998 Lecture 2: Image Display and Digital Images 2: Image Display and Digital Images Image Display: - True Color, Grey, Pseudo Color,
EE547 Computer Vision: Lecture Slides Anthony P. Reeves November 24, 1998 Lecture 2: Image Display and Digital Images 2: Image Display and Digital Images Image Display: - True Color, Grey, Pseudo Color,
Cartoon Transformation
 Cartoon Transformation Jake Garrison EE 440 Final Project - 12/5/2015 Features The core of the program relies on a gradient minimization algorithm based the gradient minimization concept. This filter generally
Cartoon Transformation Jake Garrison EE 440 Final Project - 12/5/2015 Features The core of the program relies on a gradient minimization algorithm based the gradient minimization concept. This filter generally
Image Processing: Final Exam November 10, :30 10:30
 Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Statistical Approach to a Color-based Face Detection Algorithm
 Statistical Approach to a Color-based Face Detection Algorithm EE 368 Digital Image Processing Group 15 Carmen Ng Thomas Pun May 27, 2002 Table of Content Table of Content... 2 Table of Figures... 3 Introduction:...
Statistical Approach to a Color-based Face Detection Algorithm EE 368 Digital Image Processing Group 15 Carmen Ng Thomas Pun May 27, 2002 Table of Content Table of Content... 2 Table of Figures... 3 Introduction:...
[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16
![[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16](/thumbs/89/98496315.jpg "[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16") Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Morphological Image Processing
 Morphological Image Processing Binary dilation and erosion" Set-theoretic interpretation" Opening, closing, morphological edge detectors" Hit-miss filter" Morphological filters for gray-level images" Cascading
Morphological Image Processing Binary dilation and erosion" Set-theoretic interpretation" Opening, closing, morphological edge detectors" Hit-miss filter" Morphological filters for gray-level images" Cascading
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
MOVING OBJECT DETECTION USING BACKGROUND SUBTRACTION ALGORITHM USING SIMULINK
 MOVING OBJECT DETECTION USING BACKGROUND SUBTRACTION ALGORITHM USING SIMULINK Mahamuni P. D 1, R. P. Patil 2, H.S. Thakar 3 1 PG Student, E & TC Department, SKNCOE, Vadgaon Bk, Pune, India 2 Asst. Professor,
MOVING OBJECT DETECTION USING BACKGROUND SUBTRACTION ALGORITHM USING SIMULINK Mahamuni P. D 1, R. P. Patil 2, H.S. Thakar 3 1 PG Student, E & TC Department, SKNCOE, Vadgaon Bk, Pune, India 2 Asst. Professor,
ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall Midterm Examination
 ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall 2008 October 29, 2008 Notes: Midterm Examination This is a closed book and closed notes examination. Please be precise and to the point.
ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall 2008 October 29, 2008 Notes: Midterm Examination This is a closed book and closed notes examination. Please be precise and to the point.
Lecture: Edge Detection
 CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
Reduced Image Noise on Shape Recognition Using Singular Value Decomposition for Pick and Place Robotic Systems
 Reduced Image Noise on Shape Recognition Using Singular Value Decomposition for Pick and Place Robotic Systems Angelo A. Beltran Jr. 1, Christian Deus T. Cayao 2, Jay-K V. Delicana 3, Benjamin B. Agraan
Reduced Image Noise on Shape Recognition Using Singular Value Decomposition for Pick and Place Robotic Systems Angelo A. Beltran Jr. 1, Christian Deus T. Cayao 2, Jay-K V. Delicana 3, Benjamin B. Agraan
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Experimentation on the use of Chromaticity Features, Local Binary Pattern and Discrete Cosine Transform in Colour Texture Analysis
 Experimentation on the use of Chromaticity Features, Local Binary Pattern and Discrete Cosine Transform in Colour Texture Analysis N.Padmapriya, Ovidiu Ghita, and Paul.F.Whelan Vision Systems Laboratory,
Experimentation on the use of Chromaticity Features, Local Binary Pattern and Discrete Cosine Transform in Colour Texture Analysis N.Padmapriya, Ovidiu Ghita, and Paul.F.Whelan Vision Systems Laboratory,
CMPUT 206. Introduction to Digital Image Processing
 CMPUT 206 Introduction to Digital Image Processing Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop - How does
CMPUT 206 Introduction to Digital Image Processing Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop - How does
OpenCV. OpenCV Tutorials OpenCV User Guide OpenCV API Reference. docs.opencv.org. F. Xabier Albizuri
 OpenCV OpenCV Tutorials OpenCV User Guide OpenCV API Reference docs.opencv.org F. Xabier Albizuri - 2014 OpenCV Tutorials OpenCV Tutorials: Introduction to OpenCV The Core Functionality (core module) Image
OpenCV OpenCV Tutorials OpenCV User Guide OpenCV API Reference docs.opencv.org F. Xabier Albizuri - 2014 OpenCV Tutorials OpenCV Tutorials: Introduction to OpenCV The Core Functionality (core module) Image
HCR Using K-Means Clustering Algorithm
 HCR Using K-Means Clustering Algorithm Meha Mathur 1, Anil Saroliya 2 Amity School of Engineering & Technology Amity University Rajasthan, India Abstract: Hindi is a national language of India, there are
HCR Using K-Means Clustering Algorithm Meha Mathur 1, Anil Saroliya 2 Amity School of Engineering & Technology Amity University Rajasthan, India Abstract: Hindi is a national language of India, there are
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
11. Gray-Scale Morphology. Computer Engineering, i Sejong University. Dongil Han
 Computer Vision 11. Gray-Scale Morphology Computer Engineering, i Sejong University i Dongil Han Introduction Methematical morphology represents image objects as sets in a Euclidean space by Serra [1982],
Computer Vision 11. Gray-Scale Morphology Computer Engineering, i Sejong University i Dongil Han Introduction Methematical morphology represents image objects as sets in a Euclidean space by Serra [1982],
The. Handbook ijthbdition. John C. Russ. North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina
 The IMAGE PROCESSING Handbook ijthbdition John C. Russ North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina (cp ) Taylor &. Francis \V J Taylor SiFrancis
The IMAGE PROCESSING Handbook ijthbdition John C. Russ North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina (cp ) Taylor &. Francis \V J Taylor SiFrancis
EECS490: Digital Image Processing. Lecture #17
 Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
IN5520 Digital Image Analysis. Two old exams. Practical information for any written exam Exam 4300/9305, Fritz Albregtsen
 IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Object Shape Recognition in Image for Machine Vision Application
 Object Shape Recognition in Image for Machine Vision Application Mohd Firdaus Zakaria, Hoo Seng Choon, and Shahrel Azmin Suandi Abstract Vision is the most advanced of our senses, so it is not surprising
Object Shape Recognition in Image for Machine Vision Application Mohd Firdaus Zakaria, Hoo Seng Choon, and Shahrel Azmin Suandi Abstract Vision is the most advanced of our senses, so it is not surprising
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Introduction to Video and Image Processing
 Thomas В. Moeslund Introduction to Video and Image Processing Building Real Systems and Applications Springer Contents 1 Introduction 1 1.1 The Different Flavors of Video and Image Processing 2 1.2 General
Thomas В. Moeslund Introduction to Video and Image Processing Building Real Systems and Applications Springer Contents 1 Introduction 1 1.1 The Different Flavors of Video and Image Processing 2 1.2 General
Noise Model. Important Noise Probability Density Functions (Cont.) Important Noise Probability Density Functions
 Important Noise Probability Density Functions") Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010
 An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Image Processing. Bilkent University. CS554 Computer Vision Pinar Duygulu
 Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Table 1. Different types of Defects on Tiles
 DETECTION OF SURFACE DEFECTS ON CERAMIC TILES BASED ON MORPHOLOGICAL TECHNIQUES ABSTRACT Grasha Jacob 1, R. Shenbagavalli 2, S. Karthika 3 1 Associate Professor, 2 Assistant Professor, 3 Research Scholar
DETECTION OF SURFACE DEFECTS ON CERAMIC TILES BASED ON MORPHOLOGICAL TECHNIQUES ABSTRACT Grasha Jacob 1, R. Shenbagavalli 2, S. Karthika 3 1 Associate Professor, 2 Assistant Professor, 3 Research Scholar
MASTER OF ENGINEERING IN ELECTRONIC SYSTEMS
 Automated measurement of the increase in size of the chick area vasculosa over time Raphael Walger April-August 2005 DUBLIN CITY UNIVERSITY SCHOOL OF ELECTRONIC ENGINEERING Project Report MASTER OF ENGINEERING
Automated measurement of the increase in size of the chick area vasculosa over time Raphael Walger April-August 2005 DUBLIN CITY UNIVERSITY SCHOOL OF ELECTRONIC ENGINEERING Project Report MASTER OF ENGINEERING
Morphological Image Processing
 Digital Image Processing Lecture # 10 Morphological Image Processing Autumn 2012 Agenda Extraction of Connected Component Convex Hull Thinning Thickening Skeletonization Pruning Gray-scale Morphology Digital
Digital Image Processing Lecture # 10 Morphological Image Processing Autumn 2012 Agenda Extraction of Connected Component Convex Hull Thinning Thickening Skeletonization Pruning Gray-scale Morphology Digital
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN
 CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
IDL Tutorial. Working with Images. Copyright 2008 ITT Visual Information Solutions All Rights Reserved
 IDL Tutorial Working with Images Copyright 2008 ITT Visual Information Solutions All Rights Reserved http://www.ittvis.com/ IDL is a registered trademark of ITT Visual Information Solutions for the computer
IDL Tutorial Working with Images Copyright 2008 ITT Visual Information Solutions All Rights Reserved http://www.ittvis.com/ IDL is a registered trademark of ITT Visual Information Solutions for the computer
Image Processing
 Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Advanced Vision System Integration. David Dechow Staff Engineer, Intelligent Robotics/Machine Vision FANUC America Corporation
 Advanced Vision System Integration David Dechow Staff Engineer, Intelligent Robotics/Machine Vision FANUC America Corporation Advanced Vision System Integration INTRODUCTION AND REVIEW Introduction and
Advanced Vision System Integration David Dechow Staff Engineer, Intelligent Robotics/Machine Vision FANUC America Corporation Advanced Vision System Integration INTRODUCTION AND REVIEW Introduction and
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
AnalySIS Tutorial part 2
 AnalySIS Tutorial part 2 Sveinung Lillehaug Neural Systems and Graphics Computing Laboratory Department of Anatomy University of Oslo N-0317 Oslo Norway www.nesys.uio.no Using AnalySIS to automatically
AnalySIS Tutorial part 2 Sveinung Lillehaug Neural Systems and Graphics Computing Laboratory Department of Anatomy University of Oslo N-0317 Oslo Norway www.nesys.uio.no Using AnalySIS to automatically
Examination in Image Processing
 Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chapter 9 Morphological Image Processing
 Morphological Image Processing Question What is Mathematical Morphology? An (imprecise) Mathematical Answer A mathematical tool for investigating geometric structure in binary and grayscale images. Shape
Morphological Image Processing Question What is Mathematical Morphology? An (imprecise) Mathematical Answer A mathematical tool for investigating geometric structure in binary and grayscale images. Shape
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Crush Around Augmented Reality Game Computer Vision and Image Processing for Mobile Platforms
 Crush Around Augmented Reality Game Computer Vision and Image Processing for Mobile Platforms Tomer Cagan cagan.tomer@post.idc.ac.il Ziv Levy levy.ziv@post.idc.ac.il School of Computer Science. The Interdisciplinary
Crush Around Augmented Reality Game Computer Vision and Image Processing for Mobile Platforms Tomer Cagan cagan.tomer@post.idc.ac.il Ziv Levy levy.ziv@post.idc.ac.il School of Computer Science. The Interdisciplinary
Image Analysis. Morphological Image Analysis
 Image Analysis Morphological Image Analysis Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008 University of Ioannina - Department
Image Analysis Morphological Image Analysis Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008 University of Ioannina - Department
A Simple Automated Void Defect Detection for Poor Contrast X-ray Images of BGA
 Proceedings of the 3rd International Conference on Industrial Application Engineering 2015 A Simple Automated Void Defect Detection for Poor Contrast X-ray Images of BGA Somchai Nuanprasert a,*, Sueki
Proceedings of the 3rd International Conference on Industrial Application Engineering 2015 A Simple Automated Void Defect Detection for Poor Contrast X-ray Images of BGA Somchai Nuanprasert a,*, Sueki
Image Processing. Traitement d images. Yuliya Tarabalka Tel.
 Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
A vision-based system for inspecting painted slates
 A vision-based system for inspecting painted slates Tim Carew, Paul F. Whelan and Ovidiu Ghita Vision Systems Laboratory, School of Electronic Engineering, Dublin City University, Dublin 9, Ireland. email:
A vision-based system for inspecting painted slates Tim Carew, Paul F. Whelan and Ovidiu Ghita Vision Systems Laboratory, School of Electronic Engineering, Dublin City University, Dublin 9, Ireland. email:
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Feature Extraction of Edge Detected Images
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Image segmentation. Stefano Ferrari. Università degli Studi di Milano Methods for Image Processing. academic year
 Image segmentation Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2017 2018 Segmentation by thresholding Thresholding is the simplest
Image segmentation Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2017 2018 Segmentation by thresholding Thresholding is the simplest
Binary Shape Characterization using Morphological Boundary Class Distribution Functions
 Binary Shape Characterization using Morphological Boundary Class Distribution Functions Marcin Iwanowski Institute of Control and Industrial Electronics, Warsaw University of Technology, ul.koszykowa 75,
Binary Shape Characterization using Morphological Boundary Class Distribution Functions Marcin Iwanowski Institute of Control and Industrial Electronics, Warsaw University of Technology, ul.koszykowa 75,
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 6 Sept 6 th, 2017 Pranav Mantini Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Today Review Logical Operations on Binary Images Blob Coloring
Digital Image Processing COSC 6380/4393 Lecture 6 Sept 6 th, 2017 Pranav Mantini Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Today Review Logical Operations on Binary Images Blob Coloring
Vivekananda. Collegee of Engineering & Technology. Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT.
 Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Binary Image Analysis. Binary Image Analysis. What kinds of operations? Results of analysis. Useful Operations. Example: red blood cell image
 inary Image Analysis inary Image Analysis inary image analysis consists of a set of image analysis operations that are used to produce or process binary images, usually images of s and s. represents the
inary Image Analysis inary Image Analysis inary image analysis consists of a set of image analysis operations that are used to produce or process binary images, usually images of s and s. represents the
Fast and accurate automated cell boundary determination for fluorescence microscopy
 Fast and accurate automated cell boundary determination for fluorescence microscopy Stephen Hugo Arce, Pei-Hsun Wu &, and Yiider Tseng Department of Chemical Engineering, University of Florida and National
Fast and accurate automated cell boundary determination for fluorescence microscopy Stephen Hugo Arce, Pei-Hsun Wu &, and Yiider Tseng Department of Chemical Engineering, University of Florida and National
Investigation on the Discrete Cosine Transform and Chromaticity Features in Colour Texture Analysis
 ISSC 2003, Limerick. July 1 2 Investigation on the Discrete Cosine Transform and Chromaticity Features in Colour Texture Analysis Padmapriya N, Ghita O and Whelan P.F Vision Systems Group School of Electronic
ISSC 2003, Limerick. July 1 2 Investigation on the Discrete Cosine Transform and Chromaticity Features in Colour Texture Analysis Padmapriya N, Ghita O and Whelan P.F Vision Systems Group School of Electronic
FPGA IMPLEMENTATION FOR REAL TIME SOBEL EDGE DETECTOR BLOCK USING 3-LINE BUFFERS
 FPGA IMPLEMENTATION FOR REAL TIME SOBEL EDGE DETECTOR BLOCK USING 3-LINE BUFFERS 1 RONNIE O. SERFA JUAN, 2 CHAN SU PARK, 3 HI SEOK KIM, 4 HYEONG WOO CHA 1,2,3,4 CheongJu University E-maul: 1 engr_serfs@yahoo.com,
FPGA IMPLEMENTATION FOR REAL TIME SOBEL EDGE DETECTOR BLOCK USING 3-LINE BUFFERS 1 RONNIE O. SERFA JUAN, 2 CHAN SU PARK, 3 HI SEOK KIM, 4 HYEONG WOO CHA 1,2,3,4 CheongJu University E-maul: 1 engr_serfs@yahoo.com,
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EDGE DETECTION-APPLICATION OF (FIRST AND SECOND) ORDER DERIVATIVE IN IMAGE PROCESSING
 ORDER DERIVATIVE IN IMAGE PROCESSING") Diyala Journal of Engineering Sciences Second Engineering Scientific Conference College of Engineering University of Diyala 16-17 December. 2015, pp. 430-440 ISSN 1999-8716 Printed in Iraq EDGE DETECTION-APPLICATION
Diyala Journal of Engineering Sciences Second Engineering Scientific Conference College of Engineering University of Diyala 16-17 December. 2015, pp. 430-440 ISSN 1999-8716 Printed in Iraq EDGE DETECTION-APPLICATION
Lab 2. Hanz Cuevas Velásquez, Bob Fisher Advanced Vision School of Informatics, University of Edinburgh Week 3, 2018
 Lab 2 Hanz Cuevas Velásquez, Bob Fisher Advanced Vision School of Informatics, University of Edinburgh Week 3, 2018 This lab will focus on learning simple image transformations and the Canny edge detector.
Lab 2 Hanz Cuevas Velásquez, Bob Fisher Advanced Vision School of Informatics, University of Edinburgh Week 3, 2018 This lab will focus on learning simple image transformations and the Canny edge detector.
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
Classification of image operations. Image enhancement (GW-Ch. 3) Point operations. Neighbourhood operation
 Point operations. Neighbourhood operation") Image enhancement (GW-Ch. 3) Classification of image operations Process of improving image quality so that the result is more suitable for a specific application. contrast stretching histogram processing
Image enhancement (GW-Ch. 3) Classification of image operations Process of improving image quality so that the result is more suitable for a specific application. contrast stretching histogram processing
Extracting Layers and Recognizing Features for Automatic Map Understanding. Yao-Yi Chiang
 Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
Lecture #13. Point (pixel) transformations. Neighborhood processing. Color segmentation
 transformations. Neighborhood processing. Color segmentation") Lecture #13 Point (pixel) transformations Color modification Color slicing Device independent color Color balancing Neighborhood processing Smoothing Sharpening Color segmentation Color Transformations
Lecture #13 Point (pixel) transformations Color modification Color slicing Device independent color Color balancing Neighborhood processing Smoothing Sharpening Color segmentation Color Transformations
Biomedical Image Analysis. Point, Edge and Line Detection
 Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 7: Mathematical Morphology Ulisses Braga-Neto ECE Department Texas A&M University Basics of Mathematical Morphology Mathematical Morphology (MM) is a discipline
ECEN 447 Digital Image Processing Lecture 7: Mathematical Morphology Ulisses Braga-Neto ECE Department Texas A&M University Basics of Mathematical Morphology Mathematical Morphology (MM) is a discipline
Lecture 18 Representation and description I. 2. Boundary descriptors
 Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Lecture 7: Morphological Image Processing
 I2200: Digital Image processing Lecture 7: Morphological Image Processing Prof. YingLi Tian Oct. 25, 2017 Department of Electrical Engineering The City College of New York The City University of New York
I2200: Digital Image processing Lecture 7: Morphological Image Processing Prof. YingLi Tian Oct. 25, 2017 Department of Electrical Engineering The City College of New York The City University of New York
Mathematical Morphology and Distance Transforms. Robin Strand
 Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...