EECS490: Digital Image Processing. Lecture #23
|
|
|
- Estella James
- 6 years ago
- Views:
Transcription

1 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures
= A k 1( x, y)+ 1 if R( x, y) f( x, y, k) > T A k 1 ( x, y) otherwise The accumulator is incremented if the absolute difference between the reference frame and each successive frame is")
2 Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI) for a moving rectangle. A k ( x, y)= A k 1( x, y)+ 1 if R( x, y) f( x, y, k) > T A k 1 ( x, y) otherwise The accumulator is incremented if the absolute difference between the reference frame and each successive frame is above a threshold. We can also have positive and negative accumulator images. ( x, y)= P x, y k 1( )+ 1 if R ( x, y ) f ( x, y,t k ) > T N k ( x, y)= N k 1( x, y )+ 1 if R ( x, y ) f x, y,t k P k 1 ( x, y) otherwise N k 1 ( x, y) otherwise ( ) < T

3 Image Segmentation How do you construct a static reference image if something is always is motion?
4 People Counter EECS490: Digital Image Processing

. 4. Let b=n k and c=n k-1. 5.")
5 Boundary Tracking Assumptions: 1. The image is binary where 1=foreground and 0=background 2. The image is padded with a border of 0 s so an object cannot merge with the border. 3. There is only one object in this example. Moore Boundary Tracking Algorithm [1968]: 1. Start with the uppermost, leftmost foreground point b 0 in the image. Let c 0 be the west neighbor of b 0. Going clockwise from c 0 identify the first non-zero neighbor b 1 of b 0. Let c 1 be the background point immediately preceding b 1 in the sequence. 2. Let b=b 1 and c=c Let the 8-neighbors of b starting at c and proceeding clockwise be denoted as n 1, n 2,, n 8. Find the first n k which is foreground (i.e., a 1 ). 4. Let b=n k and c=n k Repeat steps 3 and 4 until b=b 0 and the next boundary point found is b 1. The sequence of b points found when the algorithm stops is the set of ordered boundary points.

6 Boundary Tracking The Moore boundary following algorithm repeats until b=b 0 and the next boundary point found is b 1. This prevents errors encountered in spurs. Simply finding b 0 again is not enough. For example, in this figure the algorithm would start at b 0, find b, and then come back to b 0 stopping prematurely with only b=b 0. However, the next boundary point found should be the circled point which is NOT b 1. Adding and the next boundary point found is b 1 will cause the algorithm to traverse the lower part of the object.

7 Chain Codes Examples of chain code direction numbers. A Freeman chain code represents a boundary as a connected sequence of straight line segments of specified direction and length.




8 Chain Codes Arbitrarily start chain code here 8-direction chain coded boundary Using original pixels usually results in a code which is too long and subject to noise Resample original image on a larger grid to reduce code size. 8-connected code:

 to get")
 Between end and start of")




9 Chain Codes 4-direction chain coded boundary Arbitrarily start chain code here 4-connected code: One practice is to rotate (pick start) to get smallest integer code. (START CODE HERE) Between end and start of boundary Chain codes can be normalized for rotation by using first differences. To compute the first difference go in counter-clockwise direction and find number of 90 rotations of direction. 1-> rotations ccw 0-> rotation ccw 1-> rotations ccw 0-> rotations ccw 3-> rotations ccw 3-> rotations ccw 2-> rotations ccw 2-> rotations ccw 4-connected difference code:




10 Noisy 570x570 image Chain Codes 9x9 averaging mask Otsu thresholded Single-point from Otsu thresholding (ignored) 8-directed chain code: Minimum magniture integer: First difference: Longest outer boundary Resampled on a 50x50 pixel grid Joining resampled pixels by straight lines



 Enclose boundary")


11 Minimum-Perimeter Polygon The goal is to represent the shape in a given boundary using the fewest possible number of sequences. Object boundary (binary image) Enclose boundary in a grid Allow boundary to shrink. The vertices of the polygon are all inner or outer corners of the grid.





12 Minimum-Perimeter Polygon convex convex The boundary cells from the previous slide enclose the circumscribed shape. Concave Concave mirror Traverse the 4-connected boundary of the circumscribed shape. Concave vertices on this boundary have mirrors on the outer boundary. The boundary is described by inner convex and outer concave vertices.


13 Minimum-Perimeter Polygon MPP Observations: 1. The MPP bounded by a simply connected cellular complex is not self-intersecting. 2. Every convex vertex of the MPP is a W vertex, but not every W vertex of a boundary is a vertex of the MPP. 3. Every mirrored concave vertex of the MPP is a B vertex, but not every B vertex of a boundary is a vertex of the MPP. 4. All B vertices are on or outside the MPP, and all W vertices are on or inside the MPP. 5. The uppermost, leftmost vertex in a sequence of vertices contained in a cellular complex is always a W vertex of the MPP. MPP convex Mirrored concave Cellular complex Not all vertices in the MPP become vertices of the MPP
14 Minimum-Perimeter Polygon Let a=(x 1,y 1 ), b=(x 2,y 2 ), and c=(x 3,y 3 ) A = x 1 y 1 1 x 2 y 2 1 x 3 y 3 1 sgn( a,b,c)= det( A)= > 0 if (a,b,c) is a counterclockwise sequence = 0 if (a,b,c) are collinear < 0 if (a,b,c) is a clockwise sequence

15 Minimum-Perimeter Polygon Definitions: Form a list whose rows are the coordinates of each vertex and whether that vertex is W or B. The concave verttices must be mirrored, the vertices must be in sequential order, and the first uppermost, leftmost vertex V O is a W vertex. There is a white crawler (W C ) and a black crawler (B C ). The Wc crawls along the convex W vertices, and the B C crawls along the mirrored concave B vertices.
 V K is on the positive side of the line (V L,W C ) [sgn(v L,W C,V K )>0 (b) V K is on the negative side of the line (V L,W C ) or is collinear with it [sgn(v L,W C,V K ) 0; V K is on the positive")
16 Minimum-Perimeter Polygon MPP Algorithm: 1. Set W C =B C =V O 2. (a) V K is on the positive side of the line (V L,W C ) [sgn(v L,W C,V K )>0 (b) V K is on the negative side of the line (V L,W C ) or is collinear with it [sgn(v L,W C,V K ) 0; V K is on the positive side of the line (V L,B C ) or is collinear with it [sgn(v L,B C,V K ) 0 (c) V K is on the negative side of the line (V L,B C ) [sgn(v L,B C,V K )<0 If condition (a) holds the next MPP vertex is W C and V L =W C ; set W C =B C =V L and continue with the next vertex. If condition (b) holds V K becomes a candidate MPP vertex. Set W C =V K if V K is convex otherwise set B C =V K. Continue with next vertex. If condition (c) holds the next vertex is B C and V L =B C. Re-initialize the algorithm by setting W C =B C =V L and continue with the next vertex after V L. 3. Continue until the first vertex is reached again.
 B The fundamental concept is to move the crawlers along the perimeter, calculate the curvatures,")


17 Minimum-Perimeter Polygon V 0 (1,4) W V 1 (2,3) B V 2 (3,3) W V 3 (3,2) B V 4 (4,1) W V 5 (7,1) W V 6 (8,2) B V 7 (9,2) B The fundamental concept is to move the crawlers along the perimeter, calculate the curvatures, and determine if the vertex is a vertex of the MPP. W C B C V L W C curvature B C curvature V 0 V 0 V 0 V 1 V 0 V 0 V 0 V L,W C,V 1 =0 V L,W B,V 1 =0 V 2 V 0 V 1 V 0 V L,W C,V 2 =0 V L,W B,V 2 >1 V 3 V 2 V 1 V 0 V L,W C,V 3 <0 V L,W B,V 3 =0 V 4 V 2 V 3 V 0 V L,W C,V 4 <0 V L,W B,V 4 =0 V 5 V 4 V 3 V 4 V L,W C,V 5 >0 V 5 V 4 V 4 V 4 V L,W C,V 5 =0 V L,W B,V 5 =0 V 6 V 5 V 4 V 4 V L,W C,V 6 >0 V 7 V 5 V 6 V 5 V L,W C,V 7 =0 V L,W B,V 7 =0







18 Minimum Perimeter Polygon 8-connected boundary MPP resampled 2x2, 206 vertices 566x566 binary image MPP resampled 3x3, 160 vertices MPP resampled 6x6, 92 vertices MPP resampled 4x4, 127 vertices MPP resampled 8x8, 66 vertices MPP resampled 16x16, 32 vertices MPP resampled 32x32, 13 vertices



19 Boundary Splitting Subdivide a segment successively until a specified criterion is satisfied 1. Identify the two most distant points joined by ab 2. Identify the most distant point up from ab 3. Identify the most distant point down from ab


-s.")

20 Signatures A signature is a 1-D representation of a boundary Signatures can be made invariant to translation but may be sensitive to rotation and scale. These signatures are r- but there are others such as (tangent)-s. Methods of selecting starting point can make signature independent of rotation 1. Select point farthest from centroid 2. Select point farthest from centroid along eigenaxis 3. Use a chain code
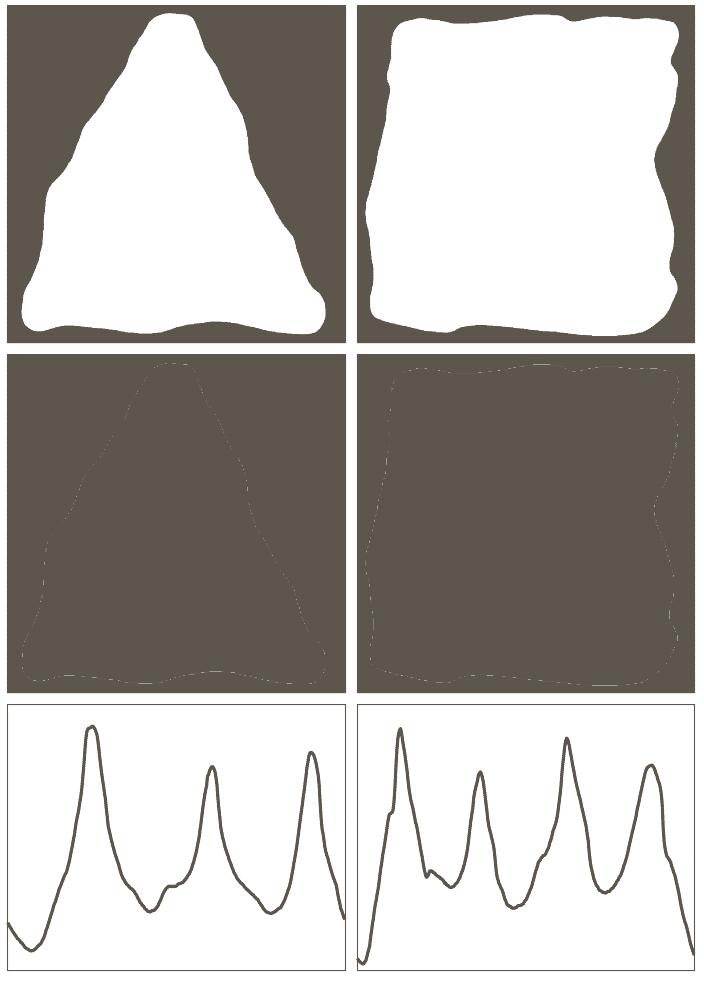
21 Signatures

22 Representation and Description The convex deficiency H-S The convex hull H The boundary of the object can be coded by the points where the boundary passes in and out of a convex deficiency


23 Median Axis Transformation Reduce the structure of a shape to a skeleton. However, as seen in our previous examples a morphological skeleton will not necessary be connected. Median Axis Transformation (MAT) of a region R with border B (guarantees connectivity of the skeleton) 1. For each point p in R find its closest* neighbor on B 2. If p has more than one closest * neighbor it belongs to the medial axis (skeleton) of B * Closest is defined using Euclidian distance




24 Thinning A suitable thinning algorithm is computationally MUCH faster that the MAT. Definitions A border point is any pixel with value 1 and at least one 8-connected neighbor with value 0. N(p 1 ) is the number of non-zero neighbors of p 1, i.e., N(p 1 )=p 2 +p 3 + +p 8 +p 9 T(p 1 ) is the number of 0->1 transitions in the ordered sequence p 1 p 2 p 3 p 9 p 2 p 1 is a boundary point N(p 1 ) = 4 T(p 1 ) = 3
 2 N(p 1 ) 6 % don t delete if p 1 is an end point or inside region (b) T(p 1 )=1 % prevents breaking lines (c) p 2 p 4 p 6 =0 %")
25 Representation and Description Algorithm for thinning binary images Step 1. Mark for deletion any border point which has all of the following: (a) 2 N(p 1 ) 6 % don t delete if p 1 is an end point or inside region (b) T(p 1 )=1 % prevents breaking lines (c) p 2 p 4 p 6 =0 % (c) and (d) say that either p 2 AND p 8 are 0 (d) p 4 p 6 p 8 =0 % or p 4 or p 6 are 0, i.e., not part of the skeleton Step 2. Mark for deletion any border point which has all of the following: (a) 2 N(p 1 ) 6 % don t delete if p 1 is an end point or inside region (b) T(p 1 )=1 % prevents breaking lines (c) p 2 p 4 p 8 =0 % (c) and (d) say that either p 4 AND p 6 are 0 (d) p 4 p 6 p 8 =0 % or p 2 OR p 8 are 0, i.e., not part of the skeleton Iterate by applying Step 1 to all border points and deleting marked points. Then apply Step 2 to all remaining border points and delete marked points. Continue until no further points are deleted.


26 Representation and Description Double branch since wider than left side Skeletonized ( thinned ) image.


27 Representation and Description 4-direction chain code To compute the first difference go in counter-clockwise direction and find number of 90 rotations of direction. The shape number n is the smallest magnitude first difference chain code. n is even for closed boundaries
![Representation and Description Definitions: Diameter = max[d(p i ),D(p j )] where p i and p j are points on the boundary.](/docs-images/76/74111551/images/28-3.jpg "Major axis is the line segment of length equal to the diameter and connecting two points on the boundary.")
28 Representation and Description Definitions: Diameter = max[d(p i ),D(p j )] where p i and p j are points on the boundary. Major axis is the line segment of length equal to the diameter and connecting two points on the boundary. Minor axis is the line perpendicular to the major axis and of such length that a box passing through the outer four points of intersection of the boundary and the major/minor axes completely enclose the boundary This box enclosing the boundary is called the basic rectangle. Eccentricity is the ratio of major to minor axis.


 which best")



29 Representation and Description 1. The major and minor axes 2. The basic rectangle 3. Use the rectangle with n=18 (given) which best approximates the shape of basic rectangle, i.e., 6x3= Resample boundary or use polygonal approximation 5. Computer chain code, its first difference, and the corresponding shape number.
= x")
= 1")
 are the Fourier descriptors of the")

30 Fourier Boundary Descriptors 1. Represent each point on a digital boundary as s k ( )= x k ( )+ jy x ( ) 2. Compute the DFT of the set of boundary points au ( )= 1 K K 1 s( k)e j 2 uk K,u = 0,1,2,...,K 1 k =0 3. The coefficients a(u) are the Fourier descriptors of the boundary K 1 s( k)= au ( )e + j 2 uk K u =0 Since K can be large we usually approximate the boundary by a smaller set of points, i.e., P, so that P 1 s( k) ŝ( k)= au ( )e + j 2 uk K u =0

31 Fourier Boundary Descriptors There are the same number of points in each reconstructed boundary but only the first P terms of the Fourier boundary descriptor were used to reconstruct the boundary. Basically, this is low-pass filtering of the shape.


32 Fourier Boundary Descriptors Fourier shape reconstruction using the first P=1434, 286, 144, 72, 36, 18 and 8 terms respectively.
 term")


33 Fourier Boundary Descriptors Shifts the DC (k=0) term Multiplies each term in a known way Rotation, scale, and translation of a boundary have simple effects on the Fourier description of that boundary.

 gr i K 1 ( ) n ( r)= r i m i=0 gr")
34 Moments Connect start and stop points and compute perpendicular displacement from this line Can compute the mean displacement m and higher order moments n μ n m = K 1 r i i=0 ( ) gr i K 1 ( ) n ( r)= r i m i=0 gr ( i )
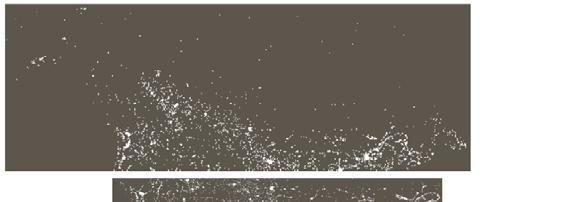

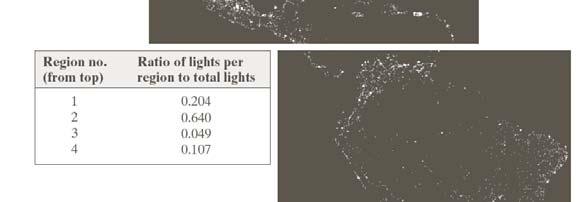

35 Other Representations Use ratio of white pixels to total area to estimate electrical energy consumption.





36 Topology Topology - properties that are unaffected by rubber sheet deformations The set of pixels that are connected to any pixel in S is called a connected component of S


37 Representation and Description E=C-H=1-1=0 E=C-H=1-2=-1 Euler number E=C-H C is the number of connected components; H is the number of holes



38 Representation and Description This polygonal network has: 7 vertices 11 edges 2 faces 3 holes 1 connected region Euler number E=V-Q+F V is the number of vertices Q is the number of edges F is the number of faces E=V-Q+F=7-11+2=-2


 gives")

 Computed skeleton")

39 Representation and Description Single infrared image Result of thresholding (largest T before river becomes disconnected) gives 1591connected components Single component with largest number of pixels (8479) Computed skeleton of this component useful for computing length of river branches, etc.
Lecture 18 Representation and description I. 2. Boundary descriptors
 Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Lecture 10: Image Descriptors and Representation
 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
Ulrik Söderström 21 Feb Representation and description
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Digital Image Processing Chapter 11: Image Description and Representation
 Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Chapter 11 Representation & Description
 Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
- Low-level image processing Image enhancement, restoration, transformation
 () Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
() Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Morphological Image Processing
 Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
Feature description. IE PŁ M. Strzelecki, P. Strumiłło
 Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Afdeling Toegepaste Wiskunde/ Division of Applied Mathematics Representation and description(skeletonization, shape numbers) SLIDE 1/16
 SLIDE 1/16") Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
Morphological Image Processing
 Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Machine vision. Summary # 6: Shape descriptors
 Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Anne Solberg
 INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
EECS490: Digital Image Processing. Lecture #20
 Lecture #20 Edge operators: LoG, DoG, Canny Edge linking Polygonal line fitting, polygon boundaries Edge relaxation Hough transform Image Segmentation Thresholded gradient image w/o smoothing Thresholded
Lecture #20 Edge operators: LoG, DoG, Canny Edge linking Polygonal line fitting, polygon boundaries Edge relaxation Hough transform Image Segmentation Thresholded gradient image w/o smoothing Thresholded
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
COMP_4190 Artificial Intelligence Computer Vision. Computer Vision. Levels of Abstraction. Digital Images
 COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
FROM PIXELS TO REGIONS
 Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Computational Geometry. Geometry Cross Product Convex Hull Problem Sweep Line Algorithm
 GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
EECS490: Digital Image Processing. Lecture #17
 Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Hierarchical Representation of 2-D Shapes using Convex Polygons: a Contour-Based Approach
 Hierarchical Representation of 2-D Shapes using Convex Polygons: a Contour-Based Approach O. El Badawy, M. S. Kamel Pattern Analysis and Machine Intelligence Laboratory, Department of Systems Design Engineering,
Hierarchical Representation of 2-D Shapes using Convex Polygons: a Contour-Based Approach O. El Badawy, M. S. Kamel Pattern Analysis and Machine Intelligence Laboratory, Department of Systems Design Engineering,
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Mathematical Morphology and Distance Transforms. Robin Strand
 Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Lecture 7: Computational Geometry
 Lecture 7: Computational Geometry CS 491 CAP Uttam Thakore Friday, October 7 th, 2016 Credit for many of the slides on solving geometry problems goes to the Stanford CS 97SI course lecture on computational
Lecture 7: Computational Geometry CS 491 CAP Uttam Thakore Friday, October 7 th, 2016 Credit for many of the slides on solving geometry problems goes to the Stanford CS 97SI course lecture on computational
Computer Graphics. The Two-Dimensional Viewing. Somsak Walairacht, Computer Engineering, KMITL
 Computer Graphics Chapter 6 The Two-Dimensional Viewing Somsak Walairacht, Computer Engineering, KMITL Outline The Two-Dimensional Viewing Pipeline The Clipping Window Normalization and Viewport Transformations
Computer Graphics Chapter 6 The Two-Dimensional Viewing Somsak Walairacht, Computer Engineering, KMITL Outline The Two-Dimensional Viewing Pipeline The Clipping Window Normalization and Viewport Transformations
Biomedical Image Analysis. Mathematical Morphology
 Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Triangulation and Convex Hull. 8th November 2018
 Triangulation and Convex Hull 8th November 2018 Agenda 1. Triangulation. No book, the slides are the curriculum 2. Finding the convex hull. Textbook, 8.6.2 2 Triangulation and terrain models Here we have
Triangulation and Convex Hull 8th November 2018 Agenda 1. Triangulation. No book, the slides are the curriculum 2. Finding the convex hull. Textbook, 8.6.2 2 Triangulation and terrain models Here we have
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
OCCHIO USA WHITE STONE VA TEL(866)
") PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
Introduction. Computer Vision & Digital Image Processing. Preview. Basic Concepts from Set Theory
 Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
SUMMARY PART I. What is texture? Uses for texture analysis. Computing texture images. Using variance estimates. INF 4300 Digital Image Analysis
 INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
EECS490: Digital Image Processing. Lecture #22
 Lecture #22 Gold Standard project images Otsu thresholding Local thresholding Region segmentation Watershed segmentation Frequency-domain techniques Project Images 1 Project Images 2 Project Images 3 Project
Lecture #22 Gold Standard project images Otsu thresholding Local thresholding Region segmentation Watershed segmentation Frequency-domain techniques Project Images 1 Project Images 2 Project Images 3 Project
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Processing of binary images
 Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
IN5520 Digital Image Analysis. Two old exams. Practical information for any written exam Exam 4300/9305, Fritz Albregtsen
 IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
On a coordinate plane, such a change can be described by counting the number of spaces, vertically and horizontally, that the figure has moved.
 Transformations We have studied four different kinds of transformations: translation, rotation, reflection, and dilation. Each one involves moving a figure to a new location on a plane. Translation Translation
Transformations We have studied four different kinds of transformations: translation, rotation, reflection, and dilation. Each one involves moving a figure to a new location on a plane. Translation Translation
(Refer Slide Time: 00:02:00)
") Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 18 Polyfill - Scan Conversion of a Polygon Today we will discuss the concepts
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 18 Polyfill - Scan Conversion of a Polygon Today we will discuss the concepts
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Morphological Image Processing
 Morphological Image Processing Introduction Morphology: a branch of biology that deals with the form and structure of animals and plants Morphological image processing is used to extract image components
Morphological Image Processing Introduction Morphology: a branch of biology that deals with the form and structure of animals and plants Morphological image processing is used to extract image components
Subset Warping: Rubber Sheeting with Cuts
 Subset Warping: Rubber Sheeting with Cuts Pierre Landau and Eric Schwartz February 14, 1994 Correspondence should be sent to: Eric Schwartz Department of Cognitive and Neural Systems Boston University
Subset Warping: Rubber Sheeting with Cuts Pierre Landau and Eric Schwartz February 14, 1994 Correspondence should be sent to: Eric Schwartz Department of Cognitive and Neural Systems Boston University
Lecture 3: Art Gallery Problems and Polygon Triangulation
 EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
Chapter 3. Sukhwinder Singh
 Chapter 3 Sukhwinder Singh PIXEL ADDRESSING AND OBJECT GEOMETRY Object descriptions are given in a world reference frame, chosen to suit a particular application, and input world coordinates are ultimately
Chapter 3 Sukhwinder Singh PIXEL ADDRESSING AND OBJECT GEOMETRY Object descriptions are given in a world reference frame, chosen to suit a particular application, and input world coordinates are ultimately
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Geometry / Integrated II TMTA Test units.
 1. An isosceles triangle has a side of length 2 units and another side of length 3 units. Which of the following best completes the statement The length of the third side of this triangle? (a) is (b) is
1. An isosceles triangle has a side of length 2 units and another side of length 3 units. Which of the following best completes the statement The length of the third side of this triangle? (a) is (b) is
CS534 Introduction to Computer Vision Binary Image Analysis. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
Shape representation by skeletonization. Shape. Shape. modular machine vision system. Feature extraction shape representation. Shape representation
 Shape representation by skeletonization Kálmán Palágyi Shape It is a fundamental concept in computer vision. It can be regarded as the basis for high-level image processing stages concentrating on scene
Shape representation by skeletonization Kálmán Palágyi Shape It is a fundamental concept in computer vision. It can be regarded as the basis for high-level image processing stages concentrating on scene
OBJECT DESCRIPTION - FEATURE EXTRACTION
 INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
Curriki Geometry Glossary
 Curriki Geometry Glossary The following terms are used throughout the Curriki Geometry projects and represent the core vocabulary and concepts that students should know to meet Common Core State Standards.
Curriki Geometry Glossary The following terms are used throughout the Curriki Geometry projects and represent the core vocabulary and concepts that students should know to meet Common Core State Standards.
Chapter 11 Arc Extraction and Segmentation
 Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
CSE 512 Course Project Operation Requirements
 CSE 512 Course Project Operation Requirements 1. Operation Checklist 1) Geometry union 2) Geometry convex hull 3) Geometry farthest pair 4) Geometry closest pair 5) Spatial range query 6) Spatial join
CSE 512 Course Project Operation Requirements 1. Operation Checklist 1) Geometry union 2) Geometry convex hull 3) Geometry farthest pair 4) Geometry closest pair 5) Spatial range query 6) Spatial join
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
Problem definition Image acquisition Image segmentation Connected component analysis. Machine vision systems - 1
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Morphological Image Processing
 Digital Image Processing Lecture # 10 Morphological Image Processing Autumn 2012 Agenda Extraction of Connected Component Convex Hull Thinning Thickening Skeletonization Pruning Gray-scale Morphology Digital
Digital Image Processing Lecture # 10 Morphological Image Processing Autumn 2012 Agenda Extraction of Connected Component Convex Hull Thinning Thickening Skeletonization Pruning Gray-scale Morphology Digital
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Course Number: Course Title: Geometry
 Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Flavor of Computational Geometry. Voronoi Diagrams. Shireen Y. Elhabian Aly A. Farag University of Louisville
 Flavor of Computational Geometry Voronoi Diagrams Shireen Y. Elhabian Aly A. Farag University of Louisville March 2010 Pepperoni Sparse Pizzas Olive Sparse Pizzas Just Two Pepperonis A person gets the
Flavor of Computational Geometry Voronoi Diagrams Shireen Y. Elhabian Aly A. Farag University of Louisville March 2010 Pepperoni Sparse Pizzas Olive Sparse Pizzas Just Two Pepperonis A person gets the
EE368 Project: Visual Code Marker Detection
 EE368 Project: Visual Code Marker Detection Kahye Song Group Number: 42 Email: kahye@stanford.edu Abstract A visual marker detection algorithm has been implemented and tested with twelve training images.
EE368 Project: Visual Code Marker Detection Kahye Song Group Number: 42 Email: kahye@stanford.edu Abstract A visual marker detection algorithm has been implemented and tested with twelve training images.
Connected components - 1
 Connected Components Basic definitions Connectivity, Adjacency, Connected Components Background/Foreground, Boundaries Run-length encoding Component Labeling Recursive algorithm Two-scan algorithm Chain
Connected Components Basic definitions Connectivity, Adjacency, Connected Components Background/Foreground, Boundaries Run-length encoding Component Labeling Recursive algorithm Two-scan algorithm Chain
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
Analysis of Binary Images
 Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
Morphological track 1
 Morphological track 1 Shapes Painting of living beings on cave walls at Lascaux [about 1500 th BC] L homme qui marche by Alberto Giacometti, 1948, NOUVELLES IMAGES Editor (1976) Les lutteurs by Honoré
Morphological track 1 Shapes Painting of living beings on cave walls at Lascaux [about 1500 th BC] L homme qui marche by Alberto Giacometti, 1948, NOUVELLES IMAGES Editor (1976) Les lutteurs by Honoré
Identifying and Reading Visual Code Markers
 O. Feinstein, EE368 Digital Image Processing Final Report 1 Identifying and Reading Visual Code Markers Oren Feinstein, Electrical Engineering Department, Stanford University Abstract A visual code marker
O. Feinstein, EE368 Digital Image Processing Final Report 1 Identifying and Reading Visual Code Markers Oren Feinstein, Electrical Engineering Department, Stanford University Abstract A visual code marker
Optimal Compression of a Polyline with Segments and Arcs
 Optimal Compression of a Polyline with Segments and Arcs Alexander Gribov Esri 380 New York Street Redlands, CA 92373 Email: agribov@esri.com arxiv:1604.07476v5 [cs.cg] 10 Apr 2017 Abstract This paper
Optimal Compression of a Polyline with Segments and Arcs Alexander Gribov Esri 380 New York Street Redlands, CA 92373 Email: agribov@esri.com arxiv:1604.07476v5 [cs.cg] 10 Apr 2017 Abstract This paper
4 Parametrization of closed curves and surfaces
 4 Parametrization of closed curves and surfaces Parametrically deformable models give rise to the question of obtaining parametrical descriptions of given pixel or voxel based object contours or surfaces,
4 Parametrization of closed curves and surfaces Parametrically deformable models give rise to the question of obtaining parametrical descriptions of given pixel or voxel based object contours or surfaces,
2-D Geometry for Programming Contests 1
 2-D Geometry for Programming Contests 1 1 Vectors A vector is defined by a direction and a magnitude. In the case of 2-D geometry, a vector can be represented as a point A = (x, y), representing the vector
2-D Geometry for Programming Contests 1 1 Vectors A vector is defined by a direction and a magnitude. In the case of 2-D geometry, a vector can be represented as a point A = (x, y), representing the vector
Image Processing. Bilkent University. CS554 Computer Vision Pinar Duygulu
 Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Multi-View Matching & Mesh Generation. Qixing Huang Feb. 13 th 2017
 Multi-View Matching & Mesh Generation Qixing Huang Feb. 13 th 2017 Geometry Reconstruction Pipeline RANSAC --- facts Sampling Feature point detection [Gelfand et al. 05, Huang et al. 06] Correspondences
Multi-View Matching & Mesh Generation Qixing Huang Feb. 13 th 2017 Geometry Reconstruction Pipeline RANSAC --- facts Sampling Feature point detection [Gelfand et al. 05, Huang et al. 06] Correspondences
Albert M. Vossepoel. Center for Image Processing
 Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course:
Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course:
Lesson 05. Mid Phase. Collision Detection
 Lesson 05 Mid Phase Collision Detection Lecture 05 Outline Problem definition and motivations Generic Bounding Volume Hierarchy (BVH) BVH construction, fitting, overlapping Metrics and Tandem traversal
Lesson 05 Mid Phase Collision Detection Lecture 05 Outline Problem definition and motivations Generic Bounding Volume Hierarchy (BVH) BVH construction, fitting, overlapping Metrics and Tandem traversal
Final Review. Image Processing CSE 166 Lecture 18
 Final Review Image Processing CSE 166 Lecture 18 Topics covered Basis vectors Matrix based transforms Wavelet transform Image compression Image watermarking Morphological image processing Segmentation
Final Review Image Processing CSE 166 Lecture 18 Topics covered Basis vectors Matrix based transforms Wavelet transform Image compression Image watermarking Morphological image processing Segmentation
CS6702 GRAPH THEORY AND APPLICATIONS 2 MARKS QUESTIONS AND ANSWERS
 CS6702 GRAPH THEORY AND APPLICATIONS 2 MARKS QUESTIONS AND ANSWERS 1 UNIT I INTRODUCTION CS6702 GRAPH THEORY AND APPLICATIONS 2 MARKS QUESTIONS AND ANSWERS 1. Define Graph. A graph G = (V, E) consists
CS6702 GRAPH THEORY AND APPLICATIONS 2 MARKS QUESTIONS AND ANSWERS 1 UNIT I INTRODUCTION CS6702 GRAPH THEORY AND APPLICATIONS 2 MARKS QUESTIONS AND ANSWERS 1. Define Graph. A graph G = (V, E) consists
Computational Geometry
 Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Divided-and-Conquer for Voronoi Diagrams Revisited. Supervisor: Ben Galehouse Presenter: Xiaoqi Cao
 Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
Dynamic Collision Detection
 Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Line Arrangement. Chapter 6
 Line Arrangement Chapter 6 Line Arrangement Problem: Given a set L of n lines in the plane, compute their arrangement which is a planar subdivision. Line Arrangements Problem: Given a set L of n lines
Line Arrangement Chapter 6 Line Arrangement Problem: Given a set L of n lines in the plane, compute their arrangement which is a planar subdivision. Line Arrangements Problem: Given a set L of n lines
ECE 600, Dr. Farag, Summer 09
 ECE 6 Summer29 Course Supplements. Lecture 4 Curves and Surfaces Aly A. Farag University of Louisville Acknowledgements: Help with these slides were provided by Shireen Elhabian A smile is a curve that
ECE 6 Summer29 Course Supplements. Lecture 4 Curves and Surfaces Aly A. Farag University of Louisville Acknowledgements: Help with these slides were provided by Shireen Elhabian A smile is a curve that
Correctness. The Powercrust Algorithm for Surface Reconstruction. Correctness. Correctness. Delaunay Triangulation. Tools - Voronoi Diagram
 Correctness The Powercrust Algorithm for Surface Reconstruction Nina Amenta Sunghee Choi Ravi Kolluri University of Texas at Austin Boundary of a solid Close to original surface Homeomorphic to original
Correctness The Powercrust Algorithm for Surface Reconstruction Nina Amenta Sunghee Choi Ravi Kolluri University of Texas at Austin Boundary of a solid Close to original surface Homeomorphic to original
Problem A. Interactive Smiley Face
 Problem A. Interactive Smiley Face 1 second Igor likes smiley faces a lot. He wrote a program that generates really large pictures of white and black pixels with smiley faces. Depending on Igor s mood,
Problem A. Interactive Smiley Face 1 second Igor likes smiley faces a lot. He wrote a program that generates really large pictures of white and black pixels with smiley faces. Depending on Igor s mood,
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Skeletonization and its applications. Dept. Image Processing & Computer Graphics University of Szeged, Hungary
 Skeletonization and its applications Kálmán Palágyi Dept. Image Processing & Computer Graphics University of Szeged, Hungary Syllabus Shape Shape features Skeleton Skeletonization Applications Syllabus
Skeletonization and its applications Kálmán Palágyi Dept. Image Processing & Computer Graphics University of Szeged, Hungary Syllabus Shape Shape features Skeleton Skeletonization Applications Syllabus
SUMMARY PART I. Variance, 2, is directly a measure of roughness. A bounded measure of smoothness is
 Digital Image Analsis SUMMARY PART I Fritz Albregtsen 4..6 Teture description of regions Remember: we estimate local properties (features) to be able to isolate regions which are similar in an image (segmentation),
Digital Image Analsis SUMMARY PART I Fritz Albregtsen 4..6 Teture description of regions Remember: we estimate local properties (features) to be able to isolate regions which are similar in an image (segmentation),
Digital Image Processing Lecture 7. Segmentation and labeling of objects. Methods for segmentation. Labeling, 2 different algorithms
 Digital Image Processing Lecture 7 p. Segmentation and labeling of objects p. Segmentation and labeling Region growing Region splitting and merging Labeling Watersheds MSER (extra, optional) More morphological
Digital Image Processing Lecture 7 p. Segmentation and labeling of objects p. Segmentation and labeling Region growing Region splitting and merging Labeling Watersheds MSER (extra, optional) More morphological