Chapter 11 Representation & Description
|
|
|
- Loreen Patterson
- 5 years ago
- Views:
Transcription
1
2 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering scheme such as the ones shown in Fig11.1.
3 Chain Codes The method generally is unacceptable for two principal reasons: (1) The resulting chain of codes tends to be quite ling and, (2) any small disturbances along the boundary due to noise or imperfect segmentation cause changes in the code that may not be related to the shape of the boundary. An approach frequently used to circumvent the problem just discussed is to resample the boundary by selecting a larger grid spacing, as illustrated in Fig 11.2(a).
4
5 Chain Codes The chain code of a boundary depends on the starting point. We can normalize also for rotation by using the first difference of the chain code instead of the code itself. The first-difference of the 4-direction chain code is If we elect to treat the code as a circular. Here, the result is
6 Polygonal Approximations A digital boundary can be approximated with arbitrary accuracy by a polygon. In practice, the goal of polygonal approximation is to capture the essence of the boundary shape with the fewest possible polygonal segments.
7 Minimum perimeter polygons Fig. 11.3(b), producing a polygon of minimum perimeter that fits the geometry established by the cell strip.
8
9 Splitting techniques One approach to boundary segment splitting is to subdivide a segment successively into two part until a specified criterion is satisfied. For a closed boundary, the best starting points usually are two farthest points in the boundary. Fig 11.4(c) shows the result of using the splitting procedure with a threshold equal to 0.25 times the length of line ab.
10
11 Signatures A signature is a 1-D functional representation of a boundary and may be generated in various ways. One of the simplest is to plot the distance from the centroid to the boundary as a functoon of angle, as illustrated in Fig 11.5.
12
13 Signatures Signatures generated by the approach just described are invariant to translation, but they do depend on rotation and scaling. Normalization with respect to rotation can be achieved by finding a way to select the same starting centroid. Another way us to select the point in the eigen axis.
14 Signatures One way to normalize for this result is to scale all functions so that they always span the same range of values, say, [0,1]. Whatever the method used, keep in mind that the basic idea is to remove dependency on size while preserving the fundamental shape of the waveforms.
15 Boundary Segments Decomposing a boundary into segments often is useful. Decomposition reduces the boundary s complexity and thus simplifies the description process. In this case use of the convex hull of the region enclosed by the boundary is a powerful tool for robust decomposition of the boundary.
16 Boundary Segments Convex hull H of an arbitrary set S is the smallest convex set containing S. The set difference H-S is called the convex deficiency D of the set S. Fig 11.6(b) shows the result in this case. Note that in principle, this scheme is independent of region size and orentation.
17
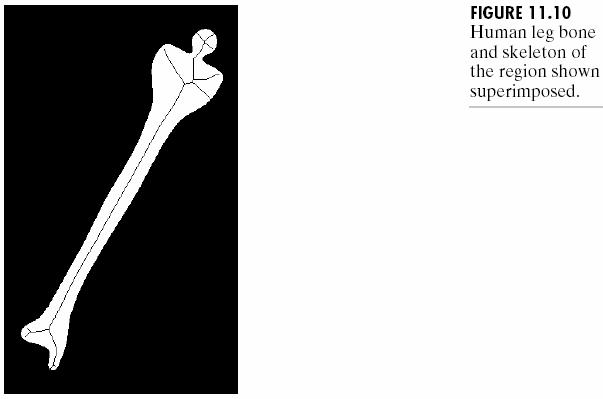
18 Skeletons An important approach to representing the structural shape of a plane region is to reduce it to a graph. This reduction may be accomplished by obtaining the skeleton of the region via a thinning (also called skeletonizing).
19 Skeletons The skeleton of a region may be defined via the medial axis transformation (MAT) proposed by Blum[1967]. The MAT of a region has an intuitive definition based on the so-called prairie fire concept. Consider an image region as a prairie of uniform, dry grass, and suppose that a fire is lit along its border. All fire fronts will advance into the region at the same speed. The MAT of the region is the set of points reached by more than one fire front at the same time.
20 Skeletons Numerous algorithms have been proposed for improving computational efficiency. Typically, these are thinning algorithm that iteratively delete edge points of a region subject to the constraints that deletion of these points: (1)does not remove end points (2)does not break connectivity (3)does not cause excessive erosion of the region.
21
22 Skeletons With reference to the 8-neighborhood notation shown in Fig 11.8, step 1 flags a contour point p1 for deletion if the following conditions are satisfied: (a) 2 N( p1 ) 6 (b) T ( p ) = 1 (c) (d) N( p1 ) is the number of ( p1 ) = p2 + p3 + L+ p8 + p9 where N p p p p p p = = 0 0 nonzero neighbors of p 1 ; that is
23
24 Skeletons T(p1) is the number of 0-1 transitions in the ordered sequence p2,p3,,p8,p9,p2. For example, N(p1)=4 and T(p1)=3 in Fig In step 2, conditions (a) and (b) remain the same, but conditions (c) and (d) are changed to (c') (d') p p 2 2 p p 4 6 p p 8 8 = = 0 0
25 Skeletons Step 1 is applied to every border pixel in the binary region under consideration. If all conditions are satisfied the point is flagged for deletion. However, the point is not deleted until all border points have been processed. After step 1 has been applied to all border points, those that were flagged are deleted (changed to 0). Then step 2 is applied to the resulting data in exactly the same manner as step 1. The basic procedure is applied iteratively until no further points are deleted.
26
27
28 Some Simple Descriptors The length of a boundary is one of its simplest descriptors. The diameter of a boundary B us defined as Diam(B) = max[ D ( p )] i, p j i, j,this line is so-called the major axis of the boundary. The minor axis of a boundary is defined as the line perpendicular to the major axis.
29 Shape Numbers As explained in Section , the first difference of a chain-coded boundary depends on the starting point. The shape number of such a boundary, bssed on the 4-directional code of Fig 11.1(a), is defined as the first difference of smallest magnitude. The order n of a shape number is defined as the number of digits in its representation.. Moreover, n is even for a closed boundary.
30

31
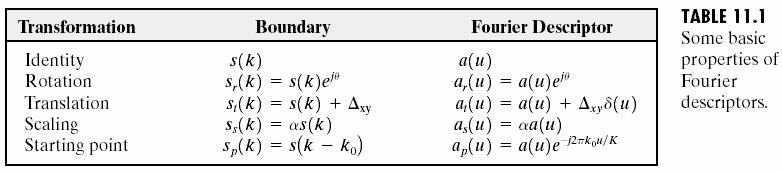
32 Fourier Descriptors
33
34
35
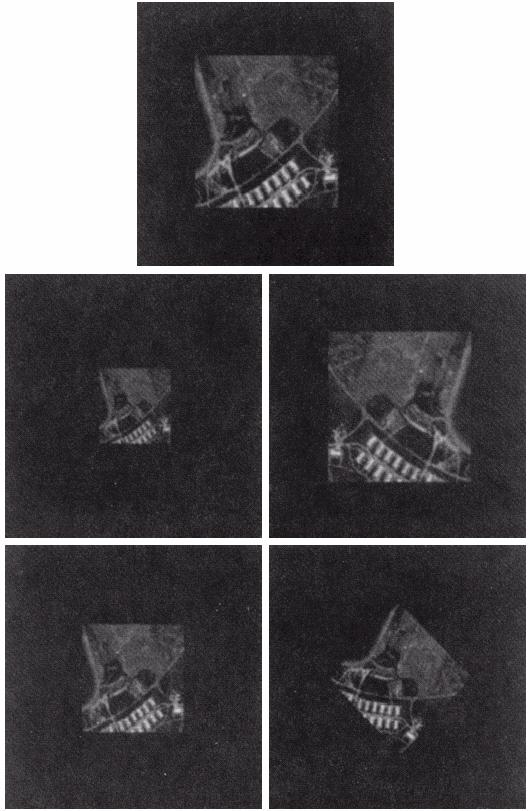
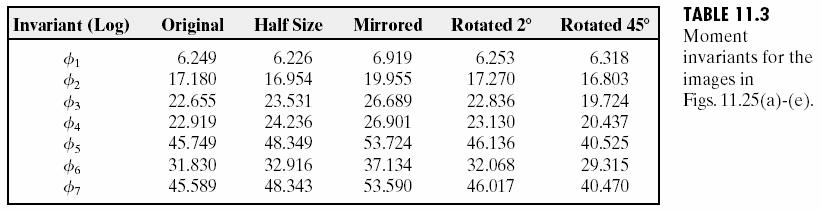
36 Statistical Moments
37
38 Some simple Descriptors The area of a region is defined as the number of pixels in the region. The perimeter of a region is the length of its boundary. Compactness of a region, defined as (perimeter)^2/area, and is minimal for a disk-shape region. Other simple measures used as region descriptors include the mean and median of the gray levels, the minimum and maximum gray-level values, and the number of pixels with above and below the mean.
39 Topological Descriptors If a topological descriptors is defined by the number of holes in the region, this property obviously will not be affected by a stretching or rotation transformation. Another topological property useful for region description is the number of connected components. The number of holes H and connected components C in a figure can be used to define the Euler Number E: E=C-H
40 Topological Descriptors The Euler number is also a topological property. The regions shown in Fig 11.19, for example, have Euler numbers equal to 0 and -1. Denoting the number of vertices by V, the number of edges by Q, and the number of faces by F gives the following relationship, called the Euler Formula: V Q + F = C = E. H
41
42
43
44
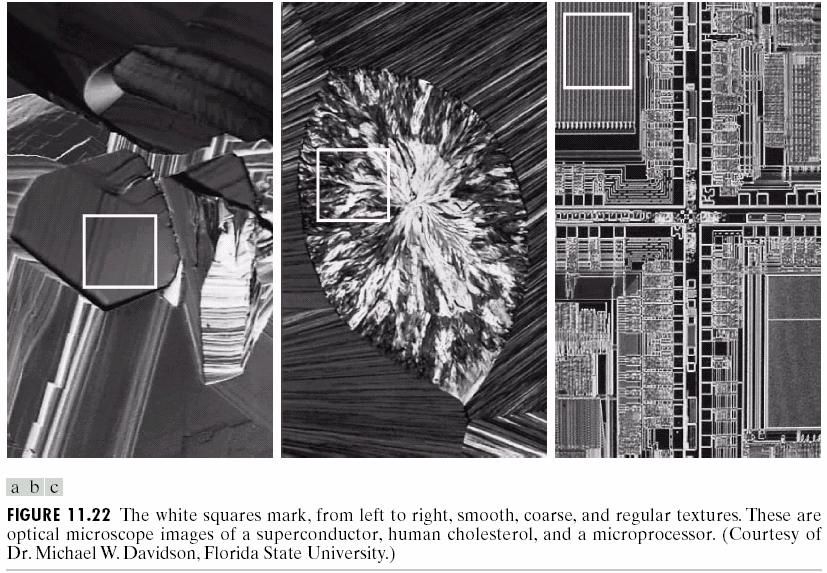
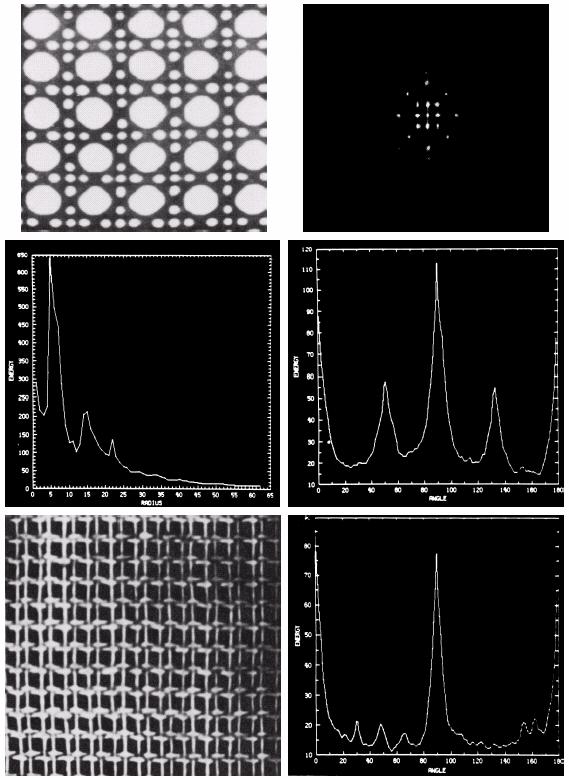
45 Texture An important approach to region description is to quantify its texture content.
46
47 Statistical approaches The nth moment of z about the mean is L 1 i = 0 n μ ( z ) = ( z m ) p( z ) m = z p ( ) n The second moment is of particular importance in texture description. It is a measure of gray-level contrast that can be used to establish descriptors of relative smoothness. For example, the measure is 0 for areas of contrast intensity (the variance is 0 here) and approaches 1 for 2 large value of σ z. i ( ) i 1 L 1 i = σ R = 2 i z i ( z)
48 Statistical approaches The third moment ( ) 3 μ3 z = ( zi m) p( z i ) is a i= 0 measure of the skewness of the histogram while the fourth moment is a measure of its relatives flatness. Some useful additional texture measures bases on histograms include a measure of L 1 2 uniformity, given by U p ( ) average entropy measure e L 1 = i= L = i= p z i ( z ) p( ) log 2 i z i

49
50 Statistical approaches C is called the gray-level co-occurrence matrix 1.Maximum probability max cij i, j 2.Element difference moment of order k ( i j) k c 3.Inverse element difference moment of order k k c ( i j) i j 4.Uniformity 5.Entropy i j i j i ij j i j 2 c ij cij log2 c ij ij ( )
51
52
53 Use of Principal Components for C x m x = E{ x} = E {( x - m )( x - m ) T } x Description covariance matrix of the vector population is defined as m = 1 K x x k K k = 1 x C x = 1 K K k = 1 x k x T k T m x m x
54 Digital Image Processing, 2nd ed. Use of Principal Components for Description ( ) {} = = = = = n y T x y y x C A AC C y E m m x A y λ λ λ O + = = = = = + = + = n k j j k j j n j j ms x T k x T e m y A x m y A x ^ λ λ λ

55
56
57
58
59

60
61
62
63
64
65
66
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Lecture 18 Representation and description I. 2. Boundary descriptors
 Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Digital Image Processing Chapter 11: Image Description and Representation
 Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Chapter 11 Representation & Description
 Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Ulrik Söderström 21 Feb Representation and description
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Lecture 10: Image Descriptors and Representation
 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
- Low-level image processing Image enhancement, restoration, transformation
 () Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
() Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
Feature description. IE PŁ M. Strzelecki, P. Strumiłło
 Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Digital Image Processing. Lecture # 15 Image Segmentation & Texture
 Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
Machine vision. Summary # 6: Shape descriptors
 Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Afdeling Toegepaste Wiskunde/ Division of Applied Mathematics Representation and description(skeletonization, shape numbers) SLIDE 1/16
 SLIDE 1/16") Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Processing of binary images
 Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Anne Solberg
 INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Morphological Image Processing
 Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Morphological Image Processing
 Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Robot vision review. Martin Jagersand
 Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Robust and efficient 2D Skeleton Shape Representation. using Shock Graphs
 1/19 Robust and efficient 2D Skeleton Shape Representation using Shock Graphs Chung, In Young Lee, Kang Eui 1. Introduction An important approach to representing the structural shape of a plane region
1/19 Robust and efficient 2D Skeleton Shape Representation using Shock Graphs Chung, In Young Lee, Kang Eui 1. Introduction An important approach to representing the structural shape of a plane region
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
SUMMARY PART I. What is texture? Uses for texture analysis. Computing texture images. Using variance estimates. INF 4300 Digital Image Analysis
 INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
IN5520 Digital Image Analysis. Two old exams. Practical information for any written exam Exam 4300/9305, Fritz Albregtsen
 IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
FROM PIXELS TO REGIONS
 Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
INTENSITY TRANSFORMATION AND SPATIAL FILTERING
 1 INTENSITY TRANSFORMATION AND SPATIAL FILTERING Lecture 3 Image Domains 2 Spatial domain Refers to the image plane itself Image processing methods are based and directly applied to image pixels Transform
1 INTENSITY TRANSFORMATION AND SPATIAL FILTERING Lecture 3 Image Domains 2 Spatial domain Refers to the image plane itself Image processing methods are based and directly applied to image pixels Transform
OBJECT DESCRIPTION - FEATURE EXTRACTION
 INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
 DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Dynamic Collision Detection
 Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Intensity Transformations and Spatial Filtering
 77 Chapter 3 Intensity Transformations and Spatial Filtering Spatial domain refers to the image plane itself, and image processing methods in this category are based on direct manipulation of pixels in
77 Chapter 3 Intensity Transformations and Spatial Filtering Spatial domain refers to the image plane itself, and image processing methods in this category are based on direct manipulation of pixels in
OCCHIO USA WHITE STONE VA TEL(866)
") PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Normalized cuts and image segmentation
 Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
Morphological Image Processing
 Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
CS534 Introduction to Computer Vision Binary Image Analysis. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
Morphological Image Processing
 Morphological Image Processing Introduction Morphology: a branch of biology that deals with the form and structure of animals and plants Morphological image processing is used to extract image components
Morphological Image Processing Introduction Morphology: a branch of biology that deals with the form and structure of animals and plants Morphological image processing is used to extract image components
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
Chapter 11 Arc Extraction and Segmentation
 Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Analysis of Binary Images
 Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Morphological Image Processing
 Digital Image Processing Lecture # 10 Morphological Image Processing Autumn 2012 Agenda Extraction of Connected Component Convex Hull Thinning Thickening Skeletonization Pruning Gray-scale Morphology Digital
Digital Image Processing Lecture # 10 Morphological Image Processing Autumn 2012 Agenda Extraction of Connected Component Convex Hull Thinning Thickening Skeletonization Pruning Gray-scale Morphology Digital
Image Restoration and Reconstruction
 Image Restoration and Reconstruction Image restoration Objective process to improve an image Recover an image by using a priori knowledge of degradation phenomenon Exemplified by removal of blur by deblurring
Image Restoration and Reconstruction Image restoration Objective process to improve an image Recover an image by using a priori knowledge of degradation phenomenon Exemplified by removal of blur by deblurring
Albert M. Vossepoel. Center for Image Processing
 Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course:
Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course:
Image Restoration and Reconstruction
 Image Restoration and Reconstruction Image restoration Objective process to improve an image, as opposed to the subjective process of image enhancement Enhancement uses heuristics to improve the image
Image Restoration and Reconstruction Image restoration Objective process to improve an image, as opposed to the subjective process of image enhancement Enhancement uses heuristics to improve the image
Mathematical Morphology and Distance Transforms. Robin Strand
 Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
Problem definition Image acquisition Image segmentation Connected component analysis. Machine vision systems - 1
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Examination in Image Processing
 Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
Texture. Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image.
 Texture Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image. Structural approach: a set of texels in some regular or repeated pattern
Texture Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image. Structural approach: a set of texels in some regular or repeated pattern
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Computer Vision. Image Segmentation. 10. Segmentation. Computer Engineering, Sejong University. Dongil Han
 Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/05 TEXTURE ANALYSIS
 ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
COMP_4190 Artificial Intelligence Computer Vision. Computer Vision. Levels of Abstraction. Digital Images
 COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
CS 490: Computer Vision Image Segmentation: Thresholding. Fall 2015 Dr. Michael J. Reale
 CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
IT Digital Image ProcessingVII Semester - Question Bank
 UNIT I DIGITAL IMAGE FUNDAMENTALS PART A Elements of Digital Image processing (DIP) systems 1. What is a pixel? 2. Define Digital Image 3. What are the steps involved in DIP? 4. List the categories of
UNIT I DIGITAL IMAGE FUNDAMENTALS PART A Elements of Digital Image processing (DIP) systems 1. What is a pixel? 2. Define Digital Image 3. What are the steps involved in DIP? 4. List the categories of
A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection
 A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection Tudor Barbu Institute of Computer Science, Iaşi, Romania Abstract We have focused on a set of problems related to
A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection Tudor Barbu Institute of Computer Science, Iaşi, Romania Abstract We have focused on a set of problems related to
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT
 CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Texture Analysis. Selim Aksoy Department of Computer Engineering Bilkent University
 Texture Analysis Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Texture An important approach to image description is to quantify its texture content. Texture
Texture Analysis Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Texture An important approach to image description is to quantify its texture content. Texture
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Filters. Advanced and Special Topics: Filters. Filters
 Filters Advanced and Special Topics: Filters Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong ELEC4245: Digital Image Processing (Second Semester, 2016 17)
Filters Advanced and Special Topics: Filters Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong ELEC4245: Digital Image Processing (Second Semester, 2016 17)
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Vivekananda. Collegee of Engineering & Technology. Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT.
 Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
Noise Model. Important Noise Probability Density Functions (Cont.) Important Noise Probability Density Functions
 Important Noise Probability Density Functions") Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS.
 SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
Hierarchical Representation of 2-D Shapes using Convex Polygons: a Contour-Based Approach
 Hierarchical Representation of 2-D Shapes using Convex Polygons: a Contour-Based Approach O. El Badawy, M. S. Kamel Pattern Analysis and Machine Intelligence Laboratory, Department of Systems Design Engineering,
Hierarchical Representation of 2-D Shapes using Convex Polygons: a Contour-Based Approach O. El Badawy, M. S. Kamel Pattern Analysis and Machine Intelligence Laboratory, Department of Systems Design Engineering,
Subdivision. Outline. Key Questions. Subdivision Surfaces. Advanced Computer Graphics (Spring 2013) Video: Geri s Game (outside link)
 Video: Geri s Game (outside link)") Advanced Computer Graphics (Spring 03) CS 83, Lecture 7: Subdivision Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs83/sp3 Slides courtesy of Szymon Rusinkiewicz, James O Brien with material from Denis
Advanced Computer Graphics (Spring 03) CS 83, Lecture 7: Subdivision Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs83/sp3 Slides courtesy of Szymon Rusinkiewicz, James O Brien with material from Denis
Basic relations between pixels (Chapter 2)
") Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN
 CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image