CONTENTS. xfischertechnik Mobile Robots. xintroductory Example; Sliding Door
|
|
|
- Georgia Lawrence
- 6 years ago
- Views:
Transcription

1 CONTENTS xmobile Robots xfischertechnik Mobile Robots xthe Kit xintroductory Example; Sliding Door xhelpful Tips
2 Welcome to the Intelligent Interface online documentation by fischertechnik x How to handle this Online Documentation in short: Click the button to access the next page Click the button to access the previous page Click the button to access the contents You can access a chapter directly by clicking the titles in the contents. The online ducumentation offers you many more navigation functions. Just click on the menu bar and try it out for yourself. Have fun with fischertechnik.

3 Mobile Robots Today s high-tech world could not function without the aid of robots. For example, the use of so-called service robots in support of manufacturing processes is extremely widespread in many industries. The following figure shows just how numerous and varied the applications for mobile robots are. Shown here is a rolling robot developed by the Fraunhofer Institute for Production Technology and Automation in Stuttgart.
4 As a mobile information source, the robot guides visitors through the institute. The robot s touch screen can be used to call up a wide variety of information. This type of robot is also extremely well suited to other applications, such as the role of a museum guide. Robots are also used to perform physically hard or dangerous work, for example, in atomic energy plants or cleaning up contaminated areas. These types of applications require a high degree of mobility and movement capability. Here, mobility and independent action are the most important abilities. Robot movement is either remote controlled or pre-programmed into the robot with the aid of a computer. The development of computer-controlled walking robots represents a particular challenge. The purpose of this, is to teach the machines a variety of motions. In doing this, insect movements form the preferred model. The advantage of machines that can walk as opposed to those which employ wheels or rollers to achieve mobility, lies primarily in better mobility over difficult terrain and in overcoming obstacles.

5 The first serious attempts to develop walking machines took place in 1967 at a Tokyo university. Initially, human movement rather than that of insects or quadrupeds formed the model for the machine s walking actions. Ongoing development of these attempts finally led to the first, two- legged, walking machine in However, walking speeds were still very slow. The so-called Wabot-2 robot is

6 the star of the current crop of two-legged robots. It is outfitted with 50 degrees o freedom of motion and 78 microprocessors. With the aid of a CCD camera, the robot is able to read notes, play and organ, and even converse. Under the leadership of Prof. Y. Baudoin, an electro-pneumatic robot equipped with six legs and known as Achilles was developed and built by a team at the Royal Military Academy, Brussels. Equipped with a camera and optical proximity sensors on its upper surface and its six legs, this robot is designed to react to raised or sunken obstacles (objects or holes in its path).

7 Currently, the most famous mobile robot model can be found on Mars. The Rover Sojourner is a selfdirected robot being used to explore the Martian surface. It weighs approx kg, is about the size of a milk crate, and is propelled by six wheels. Solar cells are employed to provide the robot with the necessary energy to carry out its designated scientific and technical experiments. The power supply is supported by batteries for night work or for times of limited sunlight. The Rover Sojourner is equipped with cameras and sensors that allow it to find its own path across unknown terrain, and to avoid obstacles.
8 Future developments will increasingly concentrate on robots that control themselves. Application areas for these robots can be found wherever actions cannot be preprogrammed because of unpredictable changes in the environment. At this point, only humans can fulfill such tasks. Reasons for this include the lack of developed artificial intelligence, inadequate memory and processing capabilities, and the limited capabilities of current sensor systems. fischertechnik Mobile Robots Building machines and robots, writing control software for them on a PC, and setting the final product in motion appears, at first glance, to be a highly complex and technical task. However, fischertechnik turns it into a fascinating and creative hobby. MOBILE ROBOTS - the name is the concept because, for the first time, a construction kit has been supplied with an intelligent interface for home and
9 semi-professional applications. Using the Windows software, LLWIN (Lucky Logic for Windows), on a PC, programs can be created for mobile robot models. These programs are then loaded via the serial port to the new intelligent interface with its own microprocessor. The interface, built into the model, can then be disconnected from the PC and is capable of autonomously controlling the models. No longer is there an annoying cable running between the model and the PC to limit the model s freedom of motion. Models can now react to obstacles and changes in brightness just as real robots do. The Kit The kit contains a number of fischertechnik parts, motors, and sensors that can be used to build a total of eight different models. Three stationary starter models - a sliding door, pulse counter, and a stamp - provide an introduction to the uses of the components, the software, and the intelligent interface. This models are simple and easy to build and their application programs are uncomplicated and easily understood.

10 The five mobile robots, MR1 to MR5, are designed to perform different tasks: MR1, the base model with two motors and two position sensor switches, can travel forwards, backwards, to the left, and to the right along pre programmed.

11 MR2 uses its bumper to recognize obstacles and circumvents them.

12 MR3 recognizes ledges such as table edges. It can move around a table without falling off.

13 MR4 always follows a light source such as a flashlight directed at it.
.")
14 MR5 is capable of moving along a black track laid out against a white background (e.g., insulation tape or magic marker).
15 The printed construction manual provides detailed information on building and wiring the models. The CD-ROM contains the LLWIN software, V2.1, with sample programs for each model, together with the LLWIN Handbooks and the intelligent interface. The models that can be built from the kit by no means exhaust the topic of mobile robots. Using other fischertechnik components, the models can be expanded, while the LLWIN software lets you create many of your own program concepts.
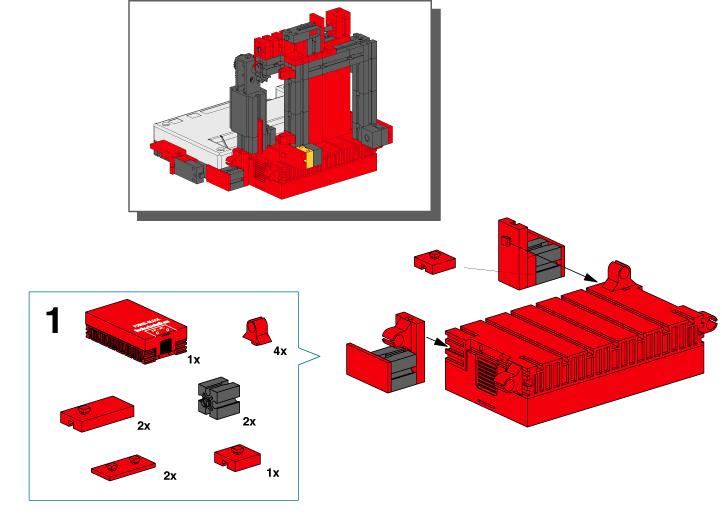
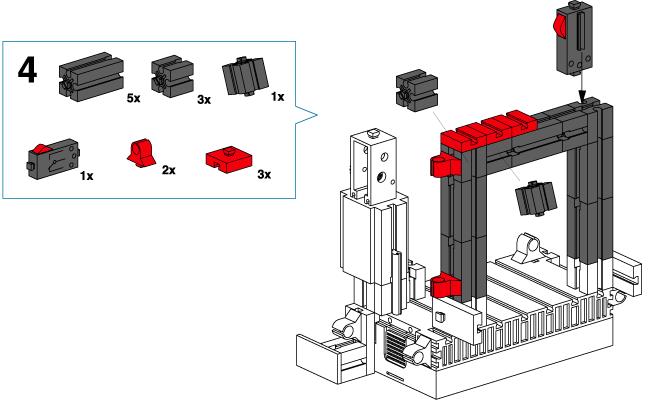
16 Introductory Example; Sliding Door First, we will build the sliding door introductory model, connect it to the PC, and then run it. This is designed to ease your way into the world of fischertechnik computing, and to clearly demonstrate the relationships between the fischertechnik model, the interface, and the software, as well as illustrate the difference between the active and passive modes. First, build the sliding door model and connect the cables and plugs to the interface as described. The model is also described in the printed construction manual.
17
18
19
20
21
22
23
24

25 Circuit Diagram
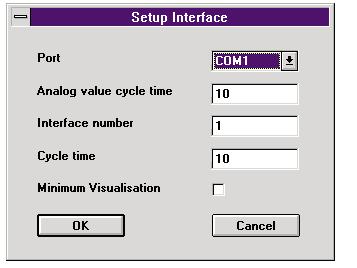
26 Now, using the connection cable, connect the interface to an open serial port on your PC (COM1 or COM2). If your PC is equipped with a 25-pin plug, the cable connector will not fit. In this case, you must purchase an adapter from your local computer retailer. After installing the LLWIN software on your PC, start it, and call up the Project window, then select Open from the pull-down menu and select the project door.mdl from the mobile directory. After selecting the Setup Interface function from the Options menu, you can specify the COM port you are using (COM1 or COM2) in the Port item.
27

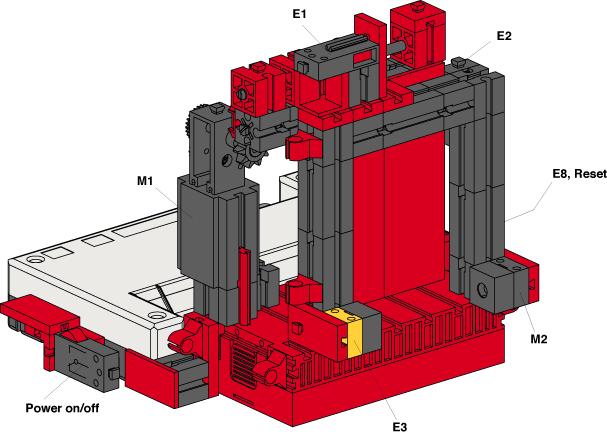
28 Select Check Interface from the Options menu to test whether your computer is accessing the interface and whether the motor, lamp, and sensors have been properly connected. Use the left mouse button to start the motors turning to the left, and the right button to start them turning to the right.
29 If the motors do not operate or if the message No connection to the interface appears on the screen, check for the following possible error sources: x Is the power supply connected to the interface (red LED on)? You can use the Power on/off switch to interrupt the battery power supply to the interface. x Interface connection cable plugged in? x Have you specified the right interface in setup interface? x Is there an active mode program still running on the interface? To delete a program from the interface, briefly interrupt the power supply. When everything is running correctly, select the Start function from the Run menu. The program then runs in the so-called passive mode, in witch the interface is permanently connected to the PC.
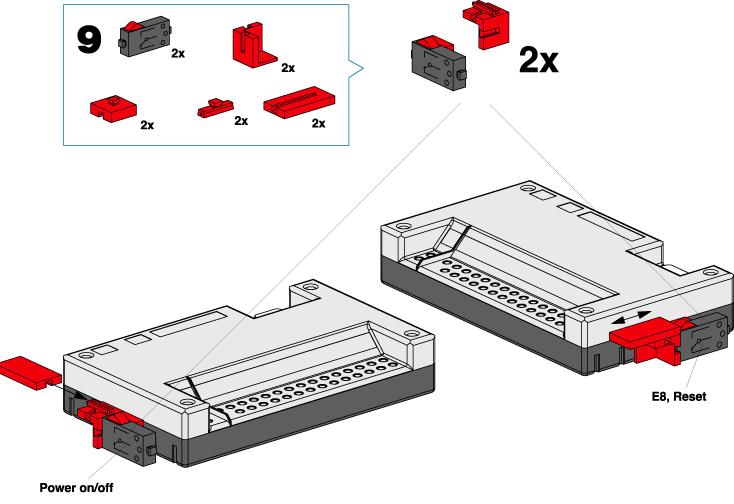
30 The program first closes the sliding door. When the light barrier is broken, the door opens. The door remains open for a specified period of time, then automatically closes. The current door state is displayed on your terminal. To terminate the program, either select the Stop item from the Run menu, or press <F9>. Now restart the program, but select Download from the Run menu. This loads the program to the interface. Your screen no longer displays the current status. However, you can now disconnect the interface from your PC, and the program will continue running. To stop the program, press the switch on the right side of the interface. This switch is connected to E8 and activates the RESET software function block. Release the switch and the program starts from the beginning. The second Power on/off switch on the left of the interface interrupts the power supply if the interface is connected to a battery. This deletes the program from the interface and returns the interface to the passive mode. You must first delete an existing program before you can load a new or modified program, or restart a program in the passive mode.
31 Helpful Tips: x To switch from the active back to the passive mode or to load a program to the interface if one is already running on it, you must first briefly interrupt the power supply to the interface. This deletes any program on the interface and returns the interface to the passive mode, after which you can load a new program to the interface. x It is most practical to operate stationary models such as the sliding door in the passive mode. The connection cable to the PC does not interfere with the door s function, and your PC s terminal can be used as a display instrument. x On the other hand, mobile robots are naturally operated in the active mode, since real mobility can only be achieved by disconnecting the model from the PC. x The capacity of the interface microprocessor is limited. When programs with more than 80 function blocks are run in the active mode, rapid counting pulses (e.g., those coming from a pulse wheel) may not be counted correctly. You should therefore use the passive mode to process very large programs.
32 So much for an introduction into the fischertechnik world of computing. Now let s go! The construction manual contains instructions for the other starter models. Work your way through them before attempting the more complicated mobile ones. But remember, the mobile robots are waiting impatiently to finally explore the world outside the kit. Finally, we would be interested in hearing from you to find out how whether like the sliding door instructions on the CD-ROM, oder whether you prefer to use printed instructions. Please write us your comments and opinions! And now, have fun with you mobile robots.
Discover Robotics & Programming CURRICULUM SAMPLE
 OOUTLINE 5 POINTS FOR EDP Yellow Level Overview Robotics incorporates mechanical engineering, electrical engineering and computer science - all of which deal with the design, construction, operation and
OOUTLINE 5 POINTS FOR EDP Yellow Level Overview Robotics incorporates mechanical engineering, electrical engineering and computer science - all of which deal with the design, construction, operation and
Roof Truss Roller Press, Tables and Jigging
 RoofTracker II Roof Truss Roller Press, Tables and Jigging August 2015 Page 1 Table of Contents Equipment Introduction to the Equipment Restricted Zone Truss Terminology Parts of a Truss Important Notes
RoofTracker II Roof Truss Roller Press, Tables and Jigging August 2015 Page 1 Table of Contents Equipment Introduction to the Equipment Restricted Zone Truss Terminology Parts of a Truss Important Notes
How-To #3: Make and Use a Motor Controller Shield
 How-To #3: Make and Use a Motor Controller Shield The Arduino single-board computer can be used to control servos and motors. But sometimes more current is required than the Arduino can provide, either
How-To #3: Make and Use a Motor Controller Shield The Arduino single-board computer can be used to control servos and motors. But sometimes more current is required than the Arduino can provide, either
Robotics Adventure Book Scouter manual STEM 1
 Robotics Robotics Adventure Book Scouter Manual Robotics Adventure Book Scouter manual STEM 1 A word with our Scouters: This activity is designed around a space exploration theme. Your Scouts will learn
Robotics Robotics Adventure Book Scouter Manual Robotics Adventure Book Scouter manual STEM 1 A word with our Scouters: This activity is designed around a space exploration theme. Your Scouts will learn
Part A: Monitoring the Rotational Sensors of the Motor
 LEGO MINDSTORMS NXT Lab 1 This lab session is an introduction to the use of motors and rotational sensors for the Lego Mindstorm NXT. The first few parts of this exercise will introduce the use of the
LEGO MINDSTORMS NXT Lab 1 This lab session is an introduction to the use of motors and rotational sensors for the Lego Mindstorm NXT. The first few parts of this exercise will introduce the use of the
2. Why is it important to remove loose jewelry before working inside a computer case?
 Chapter 2 Solutions Reviewing the Basics 1. When taking a computer apart, why is it important to not stack boards on top of each other? Answer: You could accidentally dislodge a chip. 2. Why is it important
Chapter 2 Solutions Reviewing the Basics 1. When taking a computer apart, why is it important to not stack boards on top of each other? Answer: You could accidentally dislodge a chip. 2. Why is it important
Attaching DX Encoders to your Majestic Carriage
 Attaching DX Encoders to your Majestic Carriage Encoders are the white wheels that you need to have on your carriage in order for the stitch regulation to work. Encoders detect the movement of the machine
Attaching DX Encoders to your Majestic Carriage Encoders are the white wheels that you need to have on your carriage in order for the stitch regulation to work. Encoders detect the movement of the machine
IRF90 - Rotating Focuser
 IRF90 - Rotating Focuser Part # 600180 REV092111 Page 1 Contents Introduction and Overview... 3 Limitations... 3 Packing List... 4 Installation... 5 Remove Existing Focuser... 5 Installing the Rotating
IRF90 - Rotating Focuser Part # 600180 REV092111 Page 1 Contents Introduction and Overview... 3 Limitations... 3 Packing List... 4 Installation... 5 Remove Existing Focuser... 5 Installing the Rotating
FOOTBALLER ROBOT KIT C-9893
 FOOTBALLER ROBOT KIT C-9893 NOTE: This kit is recommended for children aged 14 years, always accompanied by an adult www.cebekit.com - info@cebekit.com Contents Multi-Channel I/R Remote Control Box: 1.
FOOTBALLER ROBOT KIT C-9893 NOTE: This kit is recommended for children aged 14 years, always accompanied by an adult www.cebekit.com - info@cebekit.com Contents Multi-Channel I/R Remote Control Box: 1.
OV1000 Part No OV1000 HEIGHT ADJUSTABLE TABLE USER GUIDE
 OV1000 Part No. 23624 OV1000 HEIGHT ADJUSTABLE TABLE USER GUIDE PRODUCT OVERVIEW User Guide: OV1000 OV1000 HEIGHT ADJUSTABLE TABLE A healthier work environment starts with the option to sit or stand throughout
OV1000 Part No. 23624 OV1000 HEIGHT ADJUSTABLE TABLE USER GUIDE PRODUCT OVERVIEW User Guide: OV1000 OV1000 HEIGHT ADJUSTABLE TABLE A healthier work environment starts with the option to sit or stand throughout
logic table of contents: squarebot logic subsystem 7.1 parts & assembly concepts to understand 7 subsystems interfaces 7 logic subsystem inventory 7
 logic table of contents: squarebot logic subsystem 7.1 parts & assembly concepts to understand 7 subsystems interfaces 7 logic subsystem inventory 7 7 1 The Vex Micro Controller coordinates the flow of
logic table of contents: squarebot logic subsystem 7.1 parts & assembly concepts to understand 7 subsystems interfaces 7 logic subsystem inventory 7 7 1 The Vex Micro Controller coordinates the flow of
ASSAN ESC PC Interface Software User s Guide
 ASSAN ESC PC Interface Software User s Guide Dear customer, Welcome to use ASSAN ESC PC Connector and Interface Software. It allows of the Electronic Speed Controller programming in the desktop PC and
ASSAN ESC PC Interface Software User s Guide Dear customer, Welcome to use ASSAN ESC PC Connector and Interface Software. It allows of the Electronic Speed Controller programming in the desktop PC and
Rover 5. Explorer kit
 Rover 5 Explorer kit The explorer kit provides the perfect interface between your Rover 5 chassis and your micro-controller with all the hardware you need so you can start programming right away. PCB Features:
Rover 5 Explorer kit The explorer kit provides the perfect interface between your Rover 5 chassis and your micro-controller with all the hardware you need so you can start programming right away. PCB Features:
Experimental Procedure
 1 of 14 9/10/2018, 11:38 AM https://www.sciencebuddies.org/science-fair-projects/project-ideas/robotics_p028/robotics/obstacle-avoiding-robot (http://www.sciencebuddies.org/science-fair-projects /project-ideas/robotics_p028/robotics/obstacle-avoiding-robot)
1 of 14 9/10/2018, 11:38 AM https://www.sciencebuddies.org/science-fair-projects/project-ideas/robotics_p028/robotics/obstacle-avoiding-robot (http://www.sciencebuddies.org/science-fair-projects /project-ideas/robotics_p028/robotics/obstacle-avoiding-robot)
Motors & Wheels. Wheels can be attached to the KIBO s motors to make them spin. The motors can be attached to the KIBO robot to make it move!
 Motors & Wheels + Wheels can be attached to the KIBO s motors to make them spin. = The motors can be attached to the KIBO robot to make it move! + KIBO s motors can be attached in 2 ways to make KIBO move
Motors & Wheels + Wheels can be attached to the KIBO s motors to make them spin. = The motors can be attached to the KIBO robot to make it move! + KIBO s motors can be attached in 2 ways to make KIBO move
Copyright White Box Robotics Inc. and Frontline Robotics Inc
 Disclaimer Working with electronics and installing the plastics will require care and patience. PROPER GROUNDING PROCEDURES before handling the electronics. Touching the robot chassis (which is common
Disclaimer Working with electronics and installing the plastics will require care and patience. PROPER GROUNDING PROCEDURES before handling the electronics. Touching the robot chassis (which is common
Troubleshooting in navigation system 2
 Page 1 of 7 Pin assignments, functions etc. apply to vehicles of the series E38 and E39 with navigation system 2 (as from production break PU 97) Introduction The navigation system is a dynamic system
Page 1 of 7 Pin assignments, functions etc. apply to vehicles of the series E38 and E39 with navigation system 2 (as from production break PU 97) Introduction The navigation system is a dynamic system
OV1001 Part No OV1001 HEIGHT ADJUSTABLE TABLE USER GUIDE
 OV1001 Part No. 23620 OV1001 HEIGHT ADJUSTABLE TABLE USER GUIDE PRODUCT OVERVIEW User Guide: OV1001 OV1001 HEIGHT ADJUSTABLE TABLE A healthier work environment starts with the option to sit or stand throughout
OV1001 Part No. 23620 OV1001 HEIGHT ADJUSTABLE TABLE USER GUIDE PRODUCT OVERVIEW User Guide: OV1001 OV1001 HEIGHT ADJUSTABLE TABLE A healthier work environment starts with the option to sit or stand throughout
Programming with the NXT using the touch and ultrasonic sensors. To be used with the activity of the How do Human Sensors Work?
 Programming with the NXT using the touch and ultrasonic sensors To be used with the activity of the How do Human Sensors Work? lesson How do you incorporate sensors into your programs? What you know: You
Programming with the NXT using the touch and ultrasonic sensors To be used with the activity of the How do Human Sensors Work? lesson How do you incorporate sensors into your programs? What you know: You
09/05/2014. Engaging electronics for the new D&T curriculum. Geoff Hampson Managing Director of Kitronik. Presentation overview
 Presentation overview Engaging electronics for the new D&T curriculum Geoff Hampson Managing Director of Kitronik What to include Free web resources Electronic project ideas Using programmable components
Presentation overview Engaging electronics for the new D&T curriculum Geoff Hampson Managing Director of Kitronik What to include Free web resources Electronic project ideas Using programmable components
RISC OS 3 software upgrade fitting instructions
 RISC OS 3 software upgrade fitting instructions Contents Page number Introduction 2 Packing list 2 An overview of the software upgrade procedure 4 Identifying your upgrade 4 Upgrading your computers hardware
RISC OS 3 software upgrade fitting instructions Contents Page number Introduction 2 Packing list 2 An overview of the software upgrade procedure 4 Identifying your upgrade 4 Upgrading your computers hardware
SDP:01. Scania Diagnos & Programmer 3. User instructions. Issue 1. Scania CV AB 2006, Sweden
 SDP:01 Issue 1 en Scania Diagnos & Programmer 3 User instructions Scania CV AB 2006, Sweden Contents Contents Introduction General... 3 Why SDP3?... 4 System requirements and ancillary equipment System
SDP:01 Issue 1 en Scania Diagnos & Programmer 3 User instructions Scania CV AB 2006, Sweden Contents Contents Introduction General... 3 Why SDP3?... 4 System requirements and ancillary equipment System
External filter wheels for G2, G3 and G4 CCD cameras
 External filter wheels for G2, G3 and G4 CCD cameras User's Manual Version 2.2 Modified on May 19th, 2017 All information furnished by Moravian Instruments is believed to be accurate. Moravian Instruments
External filter wheels for G2, G3 and G4 CCD cameras User's Manual Version 2.2 Modified on May 19th, 2017 All information furnished by Moravian Instruments is believed to be accurate. Moravian Instruments
EV3 Programming Workshop for FLL Coaches
 EV3 Programming Workshop for FLL Coaches Tony Ayad 2017 Outline This workshop is intended for FLL coaches who are interested in learning about Mindstorms EV3 programming language. Programming EV3 Controller
EV3 Programming Workshop for FLL Coaches Tony Ayad 2017 Outline This workshop is intended for FLL coaches who are interested in learning about Mindstorms EV3 programming language. Programming EV3 Controller
TI-Innovator Rover Setup Guide
 TI-Innovator Rover Setup Guide This guidebook applies to TI-Innovator Rover which requires TI-Innovator Sketch software version 1.2 or later. To obtain the latest version of the documentation, go to education.ti.com/go/download.
TI-Innovator Rover Setup Guide This guidebook applies to TI-Innovator Rover which requires TI-Innovator Sketch software version 1.2 or later. To obtain the latest version of the documentation, go to education.ti.com/go/download.
INTRODUCTION CT87E FEATURES AND CONTROLS
 INTRODUCTION The CT87E is a precision instrument used to monitor and record the presence or absence of voltage, light, or sound level such as what would be produced by an operating electric motor or compressor.
INTRODUCTION The CT87E is a precision instrument used to monitor and record the presence or absence of voltage, light, or sound level such as what would be produced by an operating electric motor or compressor.
The GENIE Light Kit is ideal for introducing simple lighting projects, such as an electronic die, a wearable badge or a night-time warning system.
 Introduction 1 Welcome to the GENIE microcontroller system! The GENIE Light Kit is ideal for introducing simple lighting projects, such as an electronic die, a wearable badge or a night-time warning system.
Introduction 1 Welcome to the GENIE microcontroller system! The GENIE Light Kit is ideal for introducing simple lighting projects, such as an electronic die, a wearable badge or a night-time warning system.
Revo 120. User Manual
 Revo 120 User Manual GENERAL INFORMATION Congratulations, you have just purchased one of the most innovative and reliable lighting fixtures on the market today! The Revo 120 has been designed to perform
Revo 120 User Manual GENERAL INFORMATION Congratulations, you have just purchased one of the most innovative and reliable lighting fixtures on the market today! The Revo 120 has been designed to perform
Click Install View Touch. Installation starts. Click Next. Click Finish.
 1. Please read the instructions carefully. Improper installation may cause permanent damages, which may not be covered by the warranty. 2. Check all the parts in the package against the following parts
1. Please read the instructions carefully. Improper installation may cause permanent damages, which may not be covered by the warranty. 2. Check all the parts in the package against the following parts
Robolab. Table of Contents. St. Mary s School, Panama. Robotics. Ch. 5: Robolab, by: Ernesto E. Angulo J.
 Robolab 5 Table of Contents Objectives...2 Starting the program...2 Programming...3 Downloading...8 Tools...9 Icons...9 Loops and jumps...11 Multiple tasks...12 Timers...12 Variables...14 Sensors...15
Robolab 5 Table of Contents Objectives...2 Starting the program...2 Programming...3 Downloading...8 Tools...9 Icons...9 Loops and jumps...11 Multiple tasks...12 Timers...12 Variables...14 Sensors...15
Professional Entertainment Technology. imove 50SR. Innovation, Quality, Performance 21-
 Innovation, Quality, Performance 21- imove 50SR User Guide Professional Entertainment Technology EC Declaration of Conformity We declare that our products (lighting equipments) comply with the following
Innovation, Quality, Performance 21- imove 50SR User Guide Professional Entertainment Technology EC Declaration of Conformity We declare that our products (lighting equipments) comply with the following
INSTRUCTION MANUAL. * Design and Specifications are subject to change without notice. ver. 1.0 PRINTED IN KOREA
 INSTRUCTION MANUAL * Design and Specifications are subject to change without notice. ver. 1.0 PRINTED IN KOREA INSTRUCTION MANUAL Thank you for purchasing this product. For proper usage and application,
INSTRUCTION MANUAL * Design and Specifications are subject to change without notice. ver. 1.0 PRINTED IN KOREA INSTRUCTION MANUAL Thank you for purchasing this product. For proper usage and application,
Introduction CLASS 1 LED PRODUCT
 Introduction Thank you for purchasing a set of FlightLights, a high performance LED system for model aircraft designed and manufactured by BrainCube Aeromodels Ltd. This manual will describe how to safely
Introduction Thank you for purchasing a set of FlightLights, a high performance LED system for model aircraft designed and manufactured by BrainCube Aeromodels Ltd. This manual will describe how to safely
Sense Autonomous 2_11. All rights reserved.
 Sense Autonomous Sense Autonomous 2_11 All rights reserved. The material in this book may not be copied, duplicated, printed, translated, re-edited or broadcast without prior agreement in writing. For
Sense Autonomous Sense Autonomous 2_11 All rights reserved. The material in this book may not be copied, duplicated, printed, translated, re-edited or broadcast without prior agreement in writing. For
SAMURAI SCAN 50 LED-SC50D. User Guide. Innovation, Quality, Performance. Professional Entertainment Technology 19-
 SAMURAI SCAN 50 LED-SC50D Innovation, Quality, Performance User Guide Professional Entertainment Technology 19- EC Declaration of Conformity We declare that our products (lighting equipments) comply with
SAMURAI SCAN 50 LED-SC50D Innovation, Quality, Performance User Guide Professional Entertainment Technology 19- EC Declaration of Conformity We declare that our products (lighting equipments) comply with
MSI Safety Devices PRODUCT INFORMATION
 MSI Safety Devices PRODUCT INFORMATION A top system from the relay to the controller. MSI safety devices from Leuze electronic. With the MSI safety relays and safety controllers, optoelectronic safety
MSI Safety Devices PRODUCT INFORMATION A top system from the relay to the controller. MSI safety devices from Leuze electronic. With the MSI safety relays and safety controllers, optoelectronic safety
PC Focus Control Operator's Guide
 PC Focus Control Operator's Guide Copyright 2008 JMI Telescopes Jim's Mobile, Incorporated 8550 West 14th Avenue Lakewood, CO 80215 U.S.A. Phone (303) 233-5353 Fax (303) 233-5359 Order Line (800) 247-0304
PC Focus Control Operator's Guide Copyright 2008 JMI Telescopes Jim's Mobile, Incorporated 8550 West 14th Avenue Lakewood, CO 80215 U.S.A. Phone (303) 233-5353 Fax (303) 233-5359 Order Line (800) 247-0304
How-To #7: Assemble an H-bridge Circuit Board
 How-To #7: Assemble an H-bridge Circuit Board Making a DC motor turn is relatively easy: simply connect the motor's terminals to a power supply. But what if the motor is to be controlled by an Arduino,
How-To #7: Assemble an H-bridge Circuit Board Making a DC motor turn is relatively easy: simply connect the motor's terminals to a power supply. But what if the motor is to be controlled by an Arduino,
TA0139 USER MANUAL ARDUINO 2 WHEEL DRIVE WIRELESS BLUETOOTH ROBOT KIT
 TA0139 USER MANUAL ARDUINO 2 WHEEL DRIVE WIRELESS BLUETOOTH ROBOT KIT I Contents Overview TA0139... 1 Getting started: Arduino 2 Wheel Drive Wireless Bluetooth Robot Kit using Arduino UNO... 1 2.1. What
TA0139 USER MANUAL ARDUINO 2 WHEEL DRIVE WIRELESS BLUETOOTH ROBOT KIT I Contents Overview TA0139... 1 Getting started: Arduino 2 Wheel Drive Wireless Bluetooth Robot Kit using Arduino UNO... 1 2.1. What
DIGITAL GAME CAMERA. Model DC-6SS
 DIGITAL GAME CAMERA Model DC-6SS CONTENTS: WELCOME... 2 GETTING STARTED... 3 MOTION DETECTOR... 4-8 CAMERA MENUS... 9-10 CONNECTING TO A COMPUTER... 11 TROUBLESHOOTING... 12 WARRANTY... 13 Leaf River Outdoor
DIGITAL GAME CAMERA Model DC-6SS CONTENTS: WELCOME... 2 GETTING STARTED... 3 MOTION DETECTOR... 4-8 CAMERA MENUS... 9-10 CONNECTING TO A COMPUTER... 11 TROUBLESHOOTING... 12 WARRANTY... 13 Leaf River Outdoor
Robotic Systems ECE 401RB Fall 2006
 The following notes are from: Robotic Systems ECE 401RB Fall 2006 Lecture 13: Processors Part 1 Chapter 12, G. McComb, and M. Predko, Robot Builder's Bonanza, Third Edition, Mc- Graw Hill, 2006. I. Introduction
The following notes are from: Robotic Systems ECE 401RB Fall 2006 Lecture 13: Processors Part 1 Chapter 12, G. McComb, and M. Predko, Robot Builder's Bonanza, Third Edition, Mc- Graw Hill, 2006. I. Introduction
Contents. - i - Ver.:2
 Contents 1 Accessories of D-Point 2... 2 2 Connecting Projector to PC... 4 3 Pen Action... 4 4 Driver Installation... 5 5 Configuration Setting... 8 6 D-Point 2 Pull-up Menu... 12 7 DT02 Multi-touch Interactive
Contents 1 Accessories of D-Point 2... 2 2 Connecting Projector to PC... 4 3 Pen Action... 4 4 Driver Installation... 5 5 Configuration Setting... 8 6 D-Point 2 Pull-up Menu... 12 7 DT02 Multi-touch Interactive
RC350 Controller. Rev 01.30
 RC350 Controller Rev 01.30 Manufactured by: Taege Engineering Ltd Main West Road, Sheffield 7500 New Zealand Ph: 64 3 318 3824 Fax: 64 3 318 3646 E-mail: sales@taege.com www.taege.com : Dealer / Local
RC350 Controller Rev 01.30 Manufactured by: Taege Engineering Ltd Main West Road, Sheffield 7500 New Zealand Ph: 64 3 318 3824 Fax: 64 3 318 3646 E-mail: sales@taege.com www.taege.com : Dealer / Local
Installation, Usage and Maintenance Guide for Kit 1
 Installation, Usage and Maintenance Guide for Kit 1 July 2013 WARNING Read this document before installing or using Data East/Sega Speaker Light Mod by Pinballtoppers Improper installation, improper use,
Installation, Usage and Maintenance Guide for Kit 1 July 2013 WARNING Read this document before installing or using Data East/Sega Speaker Light Mod by Pinballtoppers Improper installation, improper use,
University of Jordan Faculty of Engineering and Technology Mechatronics Engineering Department
 University of Jordan Faculty of Engineering and Technology Mechatronics Engineering Department 2016 Control and Measurement Laboratory Robotino Robot (Mobile Robot System) Robotino Robot Objectives: The
University of Jordan Faculty of Engineering and Technology Mechatronics Engineering Department 2016 Control and Measurement Laboratory Robotino Robot (Mobile Robot System) Robotino Robot Objectives: The
EQUIPMENT OPERATION MANUAL
 EQUIPMENT OPERATION MANUAL Loctite 200, 300, and 400 Series Benchtop Robots Book 1 of 4: A Company FOR SAFE USE Safety Notes Read the following Warnings and Cautions thoroughly for the safe use of the
EQUIPMENT OPERATION MANUAL Loctite 200, 300, and 400 Series Benchtop Robots Book 1 of 4: A Company FOR SAFE USE Safety Notes Read the following Warnings and Cautions thoroughly for the safe use of the
3.6 MONITORING AND CONTROL SYSTEMS
 3.6 MONITORING AND CONTROL SYSTEMS 3.6.1 OVERVIEW OF MONITORING AND CONTROL SYSTEMS REAL-TIME APPLICATIONS A real-time system is one that can react quickly enough to data input to affect the real world.
3.6 MONITORING AND CONTROL SYSTEMS 3.6.1 OVERVIEW OF MONITORING AND CONTROL SYSTEMS REAL-TIME APPLICATIONS A real-time system is one that can react quickly enough to data input to affect the real world.
MATRIX LED LED User Manual Please read the instructions carefully before use
 MATRIX LED LED-7871 User Manual Please read the instructions carefully before use 1- 1. Safety Introductions TABLE OF CONTENTS WARNING Please read the instructions carefully which includes important information
MATRIX LED LED-7871 User Manual Please read the instructions carefully before use 1- 1. Safety Introductions TABLE OF CONTENTS WARNING Please read the instructions carefully which includes important information
Roller Shutter Guide. Radio Motors with Wireless Controls
 Roller Shutter Guide Radio Motors with Wireless Controls Technology an integral part of everyday life Introducing the next generation roller shutter motor and control solutions from SWS UK. In todays world,
Roller Shutter Guide Radio Motors with Wireless Controls Technology an integral part of everyday life Introducing the next generation roller shutter motor and control solutions from SWS UK. In todays world,
Roller Shutter Guide. Radio Motors with Wireless Controls
 Roller Shutter Guide Radio Motors with Wireless Controls Technology an integral part of everyday life Introducing the next generation roller shutter motor and control solutions from SWS UK. In todays world,
Roller Shutter Guide Radio Motors with Wireless Controls Technology an integral part of everyday life Introducing the next generation roller shutter motor and control solutions from SWS UK. In todays world,
Jippo Play - Installation Manual Page 1 INSTALLATION MANUAL. Intro Camera Operation Installation - Wrangler JK... 2
 Jippo Play - Installation Manual Page 1 INSTALLATION MANUAL CONTENTS Intro... 1 Camera Operation... 2 Installation - Wrangler JK... 2 Jippo Play Configuration... 6 VES Installation... 7 Camera Installation...
Jippo Play - Installation Manual Page 1 INSTALLATION MANUAL CONTENTS Intro... 1 Camera Operation... 2 Installation - Wrangler JK... 2 Jippo Play Configuration... 6 VES Installation... 7 Camera Installation...
RS3000 SERIES BILL ACCEPTORS
 Flash Diagnostic Codes RS3000 SERIES BILL ACCEPTORS INSTALLATION GUIDE s of the bill acceptor. Below is a chart that lists all the flash codes of the RS3000 Bill Acceptor and a description of each code.
Flash Diagnostic Codes RS3000 SERIES BILL ACCEPTORS INSTALLATION GUIDE s of the bill acceptor. Below is a chart that lists all the flash codes of the RS3000 Bill Acceptor and a description of each code.
XPS 13 Convertible Service Manual
 XPS 13 Convertible Service Manual Computer Model: XPS 9365 Regulatory Model: P71G Regulatory Type: P71G001 Notes, cautions, and warnings NOTE: A NOTE indicates important information that helps you make
XPS 13 Convertible Service Manual Computer Model: XPS 9365 Regulatory Model: P71G Regulatory Type: P71G001 Notes, cautions, and warnings NOTE: A NOTE indicates important information that helps you make
Mobile Robots: An Introduction.
 Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
XPS 15 2-in-1. Service Manual. Computer Model: XPS Regulatory Model: P73F Regulatory Type: P73F001
 XPS 15 2-in-1 Service Manual Computer Model: XPS 15-9575 Regulatory Model: P73F Regulatory Type: P73F001 Notes, cautions, and warnings NOTE: A NOTE indicates important information that helps you make better
XPS 15 2-in-1 Service Manual Computer Model: XPS 15-9575 Regulatory Model: P73F Regulatory Type: P73F001 Notes, cautions, and warnings NOTE: A NOTE indicates important information that helps you make better
The Roboguard System Introduction to Roboguard and its Decoders. 1
 Table of Contents The Roboguard System Introduction to Roboguard and its Decoders. 1 Page: The Roboguard 1. Roboguard Instalation 2 2. Aligning the Beams for Optimal Performance 3 3. Modifying the Beam
Table of Contents The Roboguard System Introduction to Roboguard and its Decoders. 1 Page: The Roboguard 1. Roboguard Instalation 2 2. Aligning the Beams for Optimal Performance 3 3. Modifying the Beam
Tech Tips. BeeBots. WeDo
 Tech Tips Teachers, especially classroom teachers who are implementing a robotics unit in their classroom, may not have much troubleshooting experience and may not have ready access to tech support. As
Tech Tips Teachers, especially classroom teachers who are implementing a robotics unit in their classroom, may not have much troubleshooting experience and may not have ready access to tech support. As
I. BASIC OPERATION (PREPARATION)
") 10 lcon indicators used in this manual I. BASIC OPERATION (PREPARATION) Operation direction Attention Lamp blinking Attaching the Camera Strap 11 1 2 3 1. Use a coin or similar object to slide the clasp
10 lcon indicators used in this manual I. BASIC OPERATION (PREPARATION) Operation direction Attention Lamp blinking Attaching the Camera Strap 11 1 2 3 1. Use a coin or similar object to slide the clasp
ASTRO-PHYSICS GTO CONTROL BOX FOR SERVO DRIVE Model GTOCP1
 ASTRO-PHYSICS GTO CONTROL BOX FOR SERVO DRIVE Model GTOCP1 GTO CONTROL BOX GTOCP1 The GTO control box contains all of the circuitry to drive the two servo motors and the logic required to navigate the
ASTRO-PHYSICS GTO CONTROL BOX FOR SERVO DRIVE Model GTOCP1 GTO CONTROL BOX GTOCP1 The GTO control box contains all of the circuitry to drive the two servo motors and the logic required to navigate the
DM-918 OPERATIONS MANUAL AUTORANGING MULTIMETER
 DM-918 OPERATIONS MANUAL AUTORANGING MULTIMETER SAFETY INFORMATION The following safety information must be observed to ensure maximum personal safety during the operation of this meter: This meter is
DM-918 OPERATIONS MANUAL AUTORANGING MULTIMETER SAFETY INFORMATION The following safety information must be observed to ensure maximum personal safety during the operation of this meter: This meter is
Quick Start Guide: RL78G14 Motor Control Starter Kit
 Document Contents 1.0 Introduction 1 2.0 Board Layout 1 3.0 Stand Alone Demonstration Mode 2 4.0 Installation 3 5.0 Using the GUI 4 6.0 RL78/G14 Programming 6 7.0 RL78/G14 Debugging 7 8.0 Next Steps 8
Document Contents 1.0 Introduction 1 2.0 Board Layout 1 3.0 Stand Alone Demonstration Mode 2 4.0 Installation 3 5.0 Using the GUI 4 6.0 RL78/G14 Programming 6 7.0 RL78/G14 Debugging 7 8.0 Next Steps 8
Computer Interface for Focusmate Driver/Digital Indicator. Operating Guide
 Computer Interface for Focusmate Driver/Digital Indicator Operating Guide Tele Vue 32 Elkay Dr., Chester, New York 10918 (845) 469-4551. televue.com Visionary Introduction Your new Focusmaster is the link
Computer Interface for Focusmate Driver/Digital Indicator Operating Guide Tele Vue 32 Elkay Dr., Chester, New York 10918 (845) 469-4551. televue.com Visionary Introduction Your new Focusmaster is the link
Dell XPS 14z Owner s Manual
 Dell XPS 14z Owner s Manual Computer model: L412z Regulatory model: P24G series Regulatory type: P24G001 Notes, Cautions, and Warnings NOTE: A NOTE indicates important information that helps you make better
Dell XPS 14z Owner s Manual Computer model: L412z Regulatory model: P24G series Regulatory type: P24G001 Notes, Cautions, and Warnings NOTE: A NOTE indicates important information that helps you make better
MECHATRONICS CATALOGUE
 2008 MECHATRONICS CATALOGUE 2 3 Mechatronics - Micro PLC training systems Mechatronics - Compact pneumatic press You can use the module with task board and task cards......with a traffic light module..
2008 MECHATRONICS CATALOGUE 2 3 Mechatronics - Micro PLC training systems Mechatronics - Compact pneumatic press You can use the module with task board and task cards......with a traffic light module..
HUB-ee BMD-S Arduino Proto Shield V1.0
 HUB-ee BMD-S Arduino Proto Shield V1.0 User guide and assembly instructions Document Version 1.0 Introduction 2 Schematic 3 Quick user guide 4 Assembly 5 1) DIP Switches 5 2) Micro-MaTch Connector Headers
HUB-ee BMD-S Arduino Proto Shield V1.0 User guide and assembly instructions Document Version 1.0 Introduction 2 Schematic 3 Quick user guide 4 Assembly 5 1) DIP Switches 5 2) Micro-MaTch Connector Headers
LME Software Block Quick Reference 1. Common Palette
 LME Software Block Quick Reference Common Palette Move Block Use this block to set your robot to go forwards or backwards in a straight line or to turn by following a curve. Define how far your robot will
LME Software Block Quick Reference Common Palette Move Block Use this block to set your robot to go forwards or backwards in a straight line or to turn by following a curve. Define how far your robot will
multipulse, multilog Installation and operating manual All that counts. EnergyMetering
 EnergyMetering multipulse, multilog Installation and operating manual Electronic pulse counter module with 3 inputs for connection of meters with pulse outputs All that counts. General information With
EnergyMetering multipulse, multilog Installation and operating manual Electronic pulse counter module with 3 inputs for connection of meters with pulse outputs All that counts. General information With
SCRATCH BUILDER R Q R O B O T C O D I N G G U I D E
 SCRATCH BUILDER R Q R O B O T C O D I N G G U I D E Scratch is developed by the Lifelong Kindergarten Group at the MIT Media Lab. See http://scratch.mit.edu1 W W W. R O B O B U I L D E R. N E T 01 INSTRALLATION
SCRATCH BUILDER R Q R O B O T C O D I N G G U I D E Scratch is developed by the Lifelong Kindergarten Group at the MIT Media Lab. See http://scratch.mit.edu1 W W W. R O B O B U I L D E R. N E T 01 INSTRALLATION
The Hardware Abstraction Layer
 The Hardware Abstraction Layer Ethan Y. Myers Wesley Y. Myers Cedar Brook Academy The Hardware Abstraction Layer 1. Introduction The Hardware Abstraction Layer (HAL) is a layer of software that hides the
The Hardware Abstraction Layer Ethan Y. Myers Wesley Y. Myers Cedar Brook Academy The Hardware Abstraction Layer 1. Introduction The Hardware Abstraction Layer (HAL) is a layer of software that hides the
Installation Job Aid for VSP 4450GTX-HT- PWR+
 Installation Job Aid for VSP 4450GTX-HT- PWR+ Notices Release 6.1.0.0 NN46251-305 Issue 02.01 November 2017 Notice paragraphs alert you about issues that require your attention. The following paragraphs
Installation Job Aid for VSP 4450GTX-HT- PWR+ Notices Release 6.1.0.0 NN46251-305 Issue 02.01 November 2017 Notice paragraphs alert you about issues that require your attention. The following paragraphs
Goal: We want to build an autonomous vehicle (robot)
") Goal: We want to build an autonomous vehicle (robot) This means it will have to think for itself, its going to need a brain Our robot s brain will be a tiny computer called a microcontroller Specifically
Goal: We want to build an autonomous vehicle (robot) This means it will have to think for itself, its going to need a brain Our robot s brain will be a tiny computer called a microcontroller Specifically
Chapter 1: Getting Started
 Getting Started Page 9 Chapter 1: Getting Started HOW MANY MICROCONTROLLERS DID YOU USE TODAY? A microcontroller is a kind of miniature computer brain that you can find in all kinds of devices. Some common,
Getting Started Page 9 Chapter 1: Getting Started HOW MANY MICROCONTROLLERS DID YOU USE TODAY? A microcontroller is a kind of miniature computer brain that you can find in all kinds of devices. Some common,
SkyeLynxComms DataHog Communications Software
 DataHog Communications Software SKLS 990 Skye Instruments Ltd., 21 Ddole Enterprise Park, Llandrindod Wells, Powys LD1 6DF UK Tel: +44 (0) 1597 824811 skyemail@skyeinstruments.com www.skyeinstruments.com
DataHog Communications Software SKLS 990 Skye Instruments Ltd., 21 Ddole Enterprise Park, Llandrindod Wells, Powys LD1 6DF UK Tel: +44 (0) 1597 824811 skyemail@skyeinstruments.com www.skyeinstruments.com
DV5-2. SC-DV5_Main.jpg. SC-DV5_Main.jpg. SC-DV5_Main.jpg
 DV5-2 SC-DV5_Main.jpg SC-DV5_Main.jpg SC-DV5_Main.jpg Overview Camera: Overview -screen Display: The DV5-2 body camera is an advanced recording system with many options and features available. Please review
DV5-2 SC-DV5_Main.jpg SC-DV5_Main.jpg SC-DV5_Main.jpg Overview Camera: Overview -screen Display: The DV5-2 body camera is an advanced recording system with many options and features available. Please review
Inspiron Service Manual. 2-in-1. Computer Model: Inspiron Regulatory Model: P69G Regulatory Type: P69G001
 Inspiron 13 5000 2-in-1 Service Manual Computer Model: Inspiron 13-5378 Regulatory Model: P69G Regulatory Type: P69G001 Notes, cautions, and warnings NOTE: A NOTE indicates important information that helps
Inspiron 13 5000 2-in-1 Service Manual Computer Model: Inspiron 13-5378 Regulatory Model: P69G Regulatory Type: P69G001 Notes, cautions, and warnings NOTE: A NOTE indicates important information that helps
KTX PC User Manual. KumoTeck 06/25/2010. Tech Support. Masahiro Ishida
 KTX PC User Manual KumoTeck 06/25/2010 Tech Support Masahiro Ishida 1 Introduction Thank you for purchasing KTX-PC from us. This Manual explains how we treat this robot and its accessories. Please read
KTX PC User Manual KumoTeck 06/25/2010 Tech Support Masahiro Ishida 1 Introduction Thank you for purchasing KTX-PC from us. This Manual explains how we treat this robot and its accessories. Please read
Fire Bird V Insect - Nex Robotics
 Fire Bird V Insect is a small six legged robot. It has three pair of legs driven by one servo each. Robot can navigate itself using Sharp IR range sensors. It can be controlled wirelessly using ZigBee
Fire Bird V Insect is a small six legged robot. It has three pair of legs driven by one servo each. Robot can navigate itself using Sharp IR range sensors. It can be controlled wirelessly using ZigBee
629/P32 (X10/P32) PIC CHIP. On - Off Operating Instructions (Revision 2)
 PIC CHIP. On - Off Operating Instructions (Revision 2)") 629/P32 (X10/P32) PIC CHIP On - Off Operating Instructions (Revision 2) This manual is a living document, therefore it will change when needed to clarify and explain the operation of the 629/P32 (X10/P32)
629/P32 (X10/P32) PIC CHIP On - Off Operating Instructions (Revision 2) This manual is a living document, therefore it will change when needed to clarify and explain the operation of the 629/P32 (X10/P32)
LED MOVING HEAD FLEX BEAM K8 RGBW. User Manual. Please read the instruction carefully before use
 LED MOVING HEAD FLEX BEAM K8 RGBW 1 User Manual Please read the instruction carefully before use CONTENTS 1. Safety Instructions... 3 2. Technical Specifications... 4 3. How To Set The Unit... 5 3.1 Front
LED MOVING HEAD FLEX BEAM K8 RGBW 1 User Manual Please read the instruction carefully before use CONTENTS 1. Safety Instructions... 3 2. Technical Specifications... 4 3. How To Set The Unit... 5 3.1 Front
WIRELESS VEHICLE WITH ANIMATRONIC ROBOTIC ARM
 WIRELESS VEHICLE WITH ANIMATRONIC ROBOTIC ARM PROJECT REFERENCE NO. : 37S0918 COLLEGE : P A COLLEGE OF ENGINEERING, MANGALORE BRANCH : ELECTRONICS & COMMUNICATION GUIDE : MOHAMMAD RAFEEQ STUDENTS : CHARANENDRA
WIRELESS VEHICLE WITH ANIMATRONIC ROBOTIC ARM PROJECT REFERENCE NO. : 37S0918 COLLEGE : P A COLLEGE OF ENGINEERING, MANGALORE BRANCH : ELECTRONICS & COMMUNICATION GUIDE : MOHAMMAD RAFEEQ STUDENTS : CHARANENDRA
Innovation First, Inc Full-Size Robot Controller Reference Guide
 2004 Full-Size Robot Controller Reference Guide 2.19.2004 www.innovationfirst.com Page 2 Table of Contents 1. Robot Controller Overview... 3 2. Main Power Input... 4 3. Battery Backup Power... 4 4. PROGRAM...
2004 Full-Size Robot Controller Reference Guide 2.19.2004 www.innovationfirst.com Page 2 Table of Contents 1. Robot Controller Overview... 3 2. Main Power Input... 4 3. Battery Backup Power... 4 4. PROGRAM...
Branch PLC. Velocio s Branch PLC
 Velocio s Branch PLC Branch PLC The Branch PLC is a member of the Velocio s groundbreaking series of programmable logic controllers. These PLCs introduce revolutionary new concepts, capabilities, performance
Velocio s Branch PLC Branch PLC The Branch PLC is a member of the Velocio s groundbreaking series of programmable logic controllers. These PLCs introduce revolutionary new concepts, capabilities, performance
imove 50SR LED-MS50A User Guide Professional Entertainment Technology
 imove 50SR LED-MS50A User Guide Professional Entertainment Technology TABLE OF CONTENTS 1. Safety Instruction 2. Technical Specification 3. How To Set The Unit 4. How To Control The Unit 5. Troubleshooting
imove 50SR LED-MS50A User Guide Professional Entertainment Technology TABLE OF CONTENTS 1. Safety Instruction 2. Technical Specification 3. How To Set The Unit 4. How To Control The Unit 5. Troubleshooting
Welcome 1. Precaution
 Table of Contents EN Precaution....2 Preparation.. 4 Standard accessories....4 Parts Names & Functions...5 Computer System requirements.... 6 Technical Specifications 7 Install the software.. 7 Start Microscope.8
Table of Contents EN Precaution....2 Preparation.. 4 Standard accessories....4 Parts Names & Functions...5 Computer System requirements.... 6 Technical Specifications 7 Install the software.. 7 Start Microscope.8
ROBOLAB Reference Guide
 ROBOLAB Reference Guide Version 1.2 2 Preface: Getting Help with ROBOLAB ROBOLAB is a growing application for which users can receive support in many different ways. Embedded in ROBOLAB are context help
ROBOLAB Reference Guide Version 1.2 2 Preface: Getting Help with ROBOLAB ROBOLAB is a growing application for which users can receive support in many different ways. Embedded in ROBOLAB are context help
Floppy Disk To USB. Converter Installation and. Operation Manual
 Floppy Disk To USB Converter Installation and Operation Manual Kit Price $125.00 Plus Shipping Why Should I Change My Floppy Drive To A USB Drive? You won't ever need floppies anymore and yet you'll be
Floppy Disk To USB Converter Installation and Operation Manual Kit Price $125.00 Plus Shipping Why Should I Change My Floppy Drive To A USB Drive? You won't ever need floppies anymore and yet you'll be
Stopping time and machine diagnosis tool. Smart.
 Stopping time and machine diagnosis tool Smart www.jokabsafety.com Contents Page 1 Stopping time 8:2 Stopping time and Machine Diagnosis Tool - Smart 8:3 Smart Manager 8:4 Smart and accessories 8:6 2 3
Stopping time and machine diagnosis tool Smart www.jokabsafety.com Contents Page 1 Stopping time 8:2 Stopping time and Machine Diagnosis Tool - Smart 8:3 Smart Manager 8:4 Smart and accessories 8:6 2 3
TC200 Operation & Installation Guide. Revision 1.0
 TC200 Operation & Installation Guide Revision 1.0 2006 2007 Monit Limited. Product of New Zealand. Introduction Thank you for your purchase of this rally computer product. At monit, we take pride in everything
TC200 Operation & Installation Guide Revision 1.0 2006 2007 Monit Limited. Product of New Zealand. Introduction Thank you for your purchase of this rally computer product. At monit, we take pride in everything
STAGE TRI-PAR 18TC CP-18TC. User Manual. Please read the instructions carefully before use
 STAGE TRI-PAR 18TC CP-18TC User Manual Please read the instructions carefully before use TABLE OF CONTENTS 1. Safety Instructions 2. Technical Specifications 3. How to Set the Fixture 4. How to Control
STAGE TRI-PAR 18TC CP-18TC User Manual Please read the instructions carefully before use TABLE OF CONTENTS 1. Safety Instructions 2. Technical Specifications 3. How to Set the Fixture 4. How to Control
970 Serials Lights. Multi-Function Lights System FEATURES SPECIFICATION
 970 Serials Lights Multi-Function Lights System FEATURES Suitable for Marine & Vehicle Easy to install & Easily relearning Remote Unit Wide Range Rotation movement. Dual Function Control with Wire Control
970 Serials Lights Multi-Function Lights System FEATURES Suitable for Marine & Vehicle Easy to install & Easily relearning Remote Unit Wide Range Rotation movement. Dual Function Control with Wire Control
Service Bulletin. MiTek. RoofTracker Roof Truss Roller Press. Machinery Affected: Adding an Operator Platform. Machinery Division
 MiTek Machinery Division Service Bulletin Machinery Affected: Document: Title: Applies To: RoofTracker Roof Truss Roller Press SB171 Adding an Operator Platform Frames 51 and Lower Copyright 2006 MiTek.
MiTek Machinery Division Service Bulletin Machinery Affected: Document: Title: Applies To: RoofTracker Roof Truss Roller Press SB171 Adding an Operator Platform Frames 51 and Lower Copyright 2006 MiTek.
BYK-mac. Total color impression of effect finishes. Ergonomic design and easy operation. Reliable readings at any time
 BYK-mac Total color impression of effect finishes The appearance of effect finishes is influenced by different viewing angles and viewing conditions. Apart from a light-dark flop and color shift special
BYK-mac Total color impression of effect finishes The appearance of effect finishes is influenced by different viewing angles and viewing conditions. Apart from a light-dark flop and color shift special
Conveyor Station Exercise 1: Learning about components and their function
 Conveyor Station Exercise 1: Learning about components and their function Learning objective Upon completing this exercise, you should be familiar with the most important components in the conveyor station
Conveyor Station Exercise 1: Learning about components and their function Learning objective Upon completing this exercise, you should be familiar with the most important components in the conveyor station
Drexel University Electrical and Computer Engineering Department ECE 200 Intelligent Systems Spring Lab 1. Pencilbox Logic Designer
 Lab 1. Pencilbox Logic Designer Introduction: In this lab, you will get acquainted with the Pencilbox Logic Designer. You will also use some of the basic hardware with which digital computers are constructed
Lab 1. Pencilbox Logic Designer Introduction: In this lab, you will get acquainted with the Pencilbox Logic Designer. You will also use some of the basic hardware with which digital computers are constructed
OLOGY HEIGHT-ADJUSTABLE DESKS. Troubleshooting Guide
 Troubleshooting Guide Power Cable Cantilevers Control Box Low-Voltage Cable Controller Lifting Column Foot Understructure OLOGY HEIGHT-ADJUSTABLE DESKS HOW THEY WORK Each Lifting Column contains an individual
Troubleshooting Guide Power Cable Cantilevers Control Box Low-Voltage Cable Controller Lifting Column Foot Understructure OLOGY HEIGHT-ADJUSTABLE DESKS HOW THEY WORK Each Lifting Column contains an individual
Direction Control of Robotic Fish Using Infrared Sensor Modules and IPMC Activation Schemes with a dspic30f4013 DSC
 Direction Control of Robotic Fish Using Infrared Sensor Modules and IPMC Activation Schemes with a dspic30f4013 DSC Carl A. Coppola 04/03/2009 ECE 480, Team 04 ME 481, Team 09 Abstract This application
Direction Control of Robotic Fish Using Infrared Sensor Modules and IPMC Activation Schemes with a dspic30f4013 DSC Carl A. Coppola 04/03/2009 ECE 480, Team 04 ME 481, Team 09 Abstract This application
VMA633 OWNER S MANUAL INSTALLATION GUIDE 6.5 WIDE ACTIVE MARTIX TFT COLOUR LCD MONITOR VMA INCH WIDE LCD MONITOR
 6.5 INCH WIDE LCD MONITOR 6.5 WIDE ACTIVE MARTIX TFT COLOUR LCD MONITOR OWNER S MANUAL INSTALLATION GUIDE OWNER S MANUAL WARNING! THE CLARION LCD MONITOR IS DESIGNED FOR NAVIGATION PURPOSE AND REAR SEAT
6.5 INCH WIDE LCD MONITOR 6.5 WIDE ACTIVE MARTIX TFT COLOUR LCD MONITOR OWNER S MANUAL INSTALLATION GUIDE OWNER S MANUAL WARNING! THE CLARION LCD MONITOR IS DESIGNED FOR NAVIGATION PURPOSE AND REAR SEAT
Zartek. CDP-808 Two Button Wireless Intercom Installers Manual
 Zartek CDP-808 Two Button Wireless Intercom Installers Manual ZA-614 Two Button Gate station including power supply, relay board and external antenna ZA-613 Handsets with charger ZA-613-E Handsets with
Zartek CDP-808 Two Button Wireless Intercom Installers Manual ZA-614 Two Button Gate station including power supply, relay board and external antenna ZA-613 Handsets with charger ZA-613-E Handsets with
LITTLE SMART USER S MANUAL. VTECH Printed in China
 LITTLE SMART USER S MANUAL VTECH Printed in China 91-01327-000 Dear Parent: At VTech we know that a child has the ability to do great things. That s why all of our electronic learning products are uniquely
LITTLE SMART USER S MANUAL VTECH Printed in China 91-01327-000 Dear Parent: At VTech we know that a child has the ability to do great things. That s why all of our electronic learning products are uniquely
NNG-Ford V1 NTV-KIT558. Navigation interface for FORD vehicles equipped with 8.4 MyTouch NTV-DOC218
 3950 NW 120th Ave, Coral Springs, FL 33065 TEL 561-955-9770 FAX 561-955-9760 NNG-Ford V1 Navigation interface for FORD vehicles equipped with 8.4 MyTouch NTV-KIT558 NTV-DOC218 SoftTouch Navigation System
3950 NW 120th Ave, Coral Springs, FL 33065 TEL 561-955-9770 FAX 561-955-9760 NNG-Ford V1 Navigation interface for FORD vehicles equipped with 8.4 MyTouch NTV-KIT558 NTV-DOC218 SoftTouch Navigation System