Introduction Feature Estimation Keypoint Detection Combining Keypoints and Features. PCL :: Features. Michael Dixon and Radu B.
|
|
|
- Nickolas Edwards
- 5 years ago
- Views:
Transcription

1 PCL :: Features Michael Dixon and Radu B. Rusu July 1, 2011
2 Outline 1. Introduction 2. Feature Estimation 3. Keypoint Detection 4. Combining Keypoints and Features
3 Introduction In this session, we ll talk about features and keypoints in PCL. Local feature estimation Surface normal estimation Point Feature Histogram descriptors Keypoint detection 3D SIFT keypoint detection Global feature estimation Viewpoint Feature Histogram descriptors Download the code and data at
4 Outline 1. Introduction 2. Feature Estimation 3. Keypoint Detection 4. Combining Keypoints and Features
5 What is a feature? Local Features What is a feature? In vision/perception, the word feature can mean many different things. In PCL, feature estimation means: computing a feature vector based on each points local neighborhood or sometimes, computing a single feature vector for the whole cloud
6 What is a feature? Local Features Feature vectors can be anything from simple surface normals to the complex feature descriptors need for registration or object detection. Today, we ll look at a couple of examples: Surface normal estimation (NormalEstimation) Point Feature Histogram estimation (FPFHEstimation) Viewpoint Feature Histogram estimation (VFHEstimation)
7 Local Features (1-2/5) Surface Normal Estimation. Theoretical Aspects: Basic Ingredients Given a point cloud with x,y,z 3D point coordinates

8 Local Features (1-2/5) Surface Normal Estimation. Theoretical Aspects: Basic Ingredients Given a point cloud with x,y,z 3D point coordinates Select each point s k-nearest neighbors, fit a local plane, and compute the plane normal
 ξ i = C j = k i=1 ξ i (p i p j")

9 Surface Normal and Curvature Estimation Local Features (3/5) ξ i = C j = k i=1 ξ i (p i p j ) T (p i p j ), p = 1 k k i=1 p i e d 2 i µ 2, p i outlier 1, p i inlier σ p = λ 0 λ 0 +λ 1 +λ 2
10 Feature estimation basics Create the feature estimation object (Templated on the input and output point types) Set the search method to use for the underlying neighborhood searches Create a k-d Tree and pass it to the feature estimator Specify the size of the local neighborhood to use when computing the features setradiussearch (r) or setnearestksearch (k) Set the input points Takes a shared pointer to a pcl::pointcloud Compute Outputs into a reference to a pcl::pointcloud
11 NormalEstimation example Estimating surface normals using pcl::normalestimation SurfaceNormalsPtr estimatesurfacenormals (const PointCloudPtr & input, float radius) { pcl::normalestimation<pointt, NormalT> normal_estimation; normal_estimation.setsearchmethod (pcl::kdtreeflann<pointt>::ptr (new pcl::kdtreeflann<pointt>)); normal_estimation.setradiussearch (radius); normal_estimation.setinputcloud (input); SurfaceNormalsPtr normals (new SurfaceNormals); normal_estimation.compute (*normals); } return (normals);

12 NormalEstimation results $./test_feature_estimation robot.pcd -n 0.03
13 Now let s look at a more complex feature, like... Point Feature Histograms (PFH)
14 A 3D feature descriptor Point Feature Histograms (PFH) For every point pair (p s, n s ); (p t, n t ), let u = n s, v = (p t p s ) u, w = u v f 0 = v, n j f 1 = u, p j p i / p j p i f 2 = p j p i f 3 = atan( w, n j, u, n j ) i hist = x 3 x=0 f x d f x max fx min d x
 i hist = x 3 x=0 f x d f x max fx min d")
15 A 3D feature descriptor Point Feature Histograms (PFH) f 0 = v, n j f 1 = u, p j p i / p j p i f 2 = p j p i f 3 = atan( w, n j, u, n j ) i hist = x 3 x=0 f x d f x max fx min d x
 For every")
, let u = n s, v = (p t p s ) u,")
16 A 3D feature descriptor Point Feature Histograms (PFH) For every point pair (p s, n s ); (p t, n t ), let u = n s, v = (p t p s ) u, w = u v

17 Point Feature Histograms (PFH) Points lying on different geometric primitives
18 As an example, we ll compute Fast Point Feature Histgram descriptors (a faster approximation of PFH) Even though FPFH feature descriptors are more complex than surface normals, the code is very similar The main difference: we need to set input normals First use pcl::estimatenormals Then pass in a shared pointer to the resulting normals
19 FPHFEstimation example LocalDescriptorsPtr computelocaldescriptors (const PointCloudPtr & points, const SurfaceNo float feature_radius) { pcl::fpfhestimation<pointt, NormalT, LocalDescriptorT> fpfh_estimati fpfh_estimation.setsearchmethod (pcl::kdtreeflann<pointt>::ptr (new pcl::kdtreeflann<pointt>)); fpfh_estimation.setradiussearch (feature_radius); fpfh_estimation.setinputcloud (points); fpfh_estimation.setinputnormals (normals); LocalDescriptorsPtr local_descriptors (new LocalDescriptors); fpfh_estimation.compute (*local_descriptors); } return (local_descriptors);
20 Outline 1. Introduction 2. Feature Estimation 3. Keypoint Detection 4. Combining Keypoints and Features
21 What is a keypoint? Keypoints What is a keypoint? A keypoint (also known as an interest point ) is simply a point that has been identified as a relevant in some way. Whether any given point is considered a keypoint or not depends on the keypoint detector in question.
22 What is a keypoint? Keypoints There s no strict definition for what constitutes a keypoint detector, but a good keypoint detector will find points which have the following properties: Sparseness: Typically, only a small subset of the points in the scene are keypoints Repeatiblity: If a point was determined to be a keypoint in one point cloud, a keypoint should also be found at the corresponding location in a similar point cloud. (Such points are often called "stable".) Distinctiveness: The area surrounding each keypoint should have a unique shape or appearance that can be captured by some feature descriptor
23 Why find keypoints? Keypoints What are the benefits of keypoints? Some features are expensive to compute, and it would be prohibitive to compute them at every point. Keypoints identify a small number of locations where computing feature descriptors is likely to be most effective. When searching for corresponding points, features computed at non-descriptive points will lead to ambiguous feature corespondences. By ignoring non-keypoints, one can reduce error when matching points.
24 Keypoint detection in PCL Keypoints There are a couple of keypoint detectors in PCL so far. In this tutorial, we ll focus on pcl::siftkeypoint A 3D adaptation of David Lowe s SIFT keypoint detector
25 SIFT keypoint detection The SIFT keypoint detector finds local extrema in a difference-of-gaussians (DoG) scale-space. This scale space and its extrema are computed based on several parameters: the size of the smallest scale the number of times the scale doubles the number of scales in between each doubling the minimum absolute DoG value needed to qualify as a keypoint Now let s look at an example of how to compute 3D SIFT keypoints in PCL
26 SIFTKeypoints example Computing keypoints on a cloud of points PointCloudPtr detectkeypoints (const PointCloudPtr & points, const SurfaceNormalsPtr float min_scale, int nr_octaves, int nr_scales_per_oc { pcl::siftkeypoint<pointt, pcl::pointwithscale> sift_detect; sift_detect.setsearchmethod (pcl::kdtreeflann<pointt>::ptr (new pcl::kdtreeflann<pointt>)); sift_detect.setscales (min_scale, nr_octaves, nr_scales_per_octave); sift_detect.setminimumcontrast (min_contrast); sift_detect.setinputcloud (points); pcl::pointcloud<pcl::pointwithscale> keypoints_temp; sift_detect.compute (keypoints_temp); PointCloudPtr keypoints (new PointCloud); pcl::copypointcloud (keypoints_temp, *keypoints); } return (keypoints);
27 Outline 1. Introduction 2. Feature Estimation 3. Keypoint Detection 4. Combining Keypoints and Features
28 Combining keypoints and features Keypoints and feature descriptors go hand-in-hand. Let s look at how to compute features only at a given set of keypoints.
29 Estimating features at a subset of points Create the feature estimation object Set the search method to use for the underlying neighborhood searches Specify the size of the local neighborhood to use when computing the features Set the search surface These points are used when searching for the input points neighbors Set the input points These are the points for each feature is computed Compute
30 Keypoints and features Computing local feature descriptors for a set of keypoints LocalDescriptorsPtr computelocaldescriptors (const PointCloudPtr & points, const SurfaceNo const PointCloudPtr & keypoints, float featur { pcl::fpfhestimation<pointt, NormalT, LocalDescriptorT> fpfh_estimati fpfh_estimation.setsearchmethod (pcl::kdtreeflann<pointt>::ptr (new fpfh_estimation.setradiussearch (feature_radius); fpfh_estimation.setsearchsurface (points); fpfh_estimation.setinputnormals (normals); fpfh_estimation.setinputcloud (keypoints); LocalDescriptorsPtr local_descriptors (new LocalDescriptors); fpfh_estimation.compute (*local_descriptors); } return (local_descriptors);
31 Global feature descriptors Computing global feature descriptors A global feature descriptor is A single descriptor computed over the entire cloud. Used to compare clouds for object recognition later in this tutorial As an example, we ll be using Viewpoint Feature Histograms
32 VFHEstimation Computing a VFH feature descriptor GlobalDescriptorsPtr computeglobaldescriptor (const PointCloudPtr & points, const SurfaceNo { pcl::vfhestimation<pointt, NormalT, GlobalDescriptorT> vfh_estimatio vfh_estimation.setsearchmethod (pcl::kdtreeflann<pointt>::ptr (new p vfh_estimation.setinputcloud (points); vfh_estimation.setinputnormals (normals); GlobalDescriptorsPtr global_descriptor (new GlobalDescriptors); vfh_estimation.compute (*global_descriptor); } return (global_descriptor);
33 Testing Use test_feature_estimation to run your code on a PCD file. The options are: -n Estimate surface normals -k Detect keypoints -l Compute local descriptors
34 Questions?
35 example The slides after this point are random ones we didn t end up using...

.")

36 PFH (5/5) Complexity Analysis Complexity is high: O(k 2 ). Optimizations to the rescue! Unordered Ordered
 = SPF (p) + 1 k k")
 Fast Point Feature")
37 Basic Concepts Fast PFH (1/4) Re-formulate: FPFH(p) = SPF (p) + 1 k k i=1 1 ω k SPF(p k ) Point Feature Histograms (PFH) Fast Point Feature Histograms (FPFH)

38 Theoretical formulation Fast PFH (2/4)

39 Noise Analysis Fast PFH (3/4) Synthetically noiseless Synthetically noisified

")
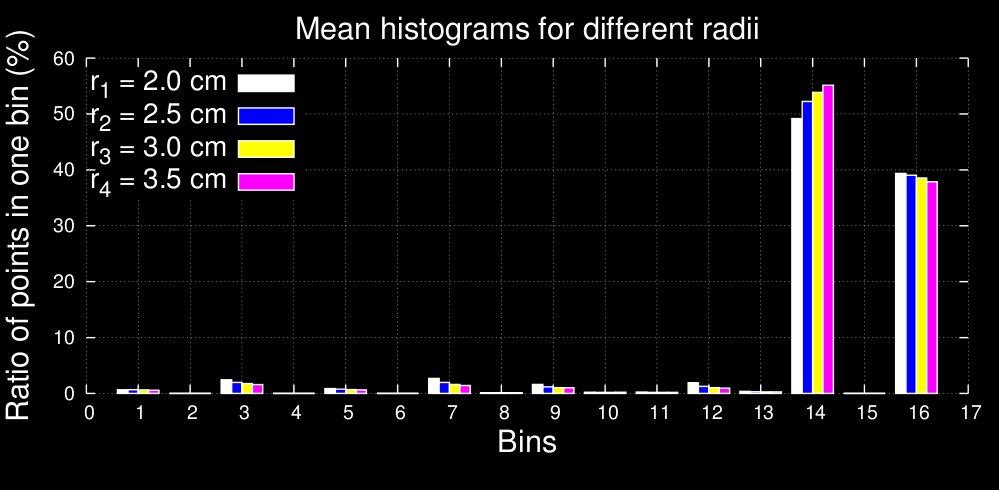
40 Noise Analysis Fast PFH (4/4)
; p.setradiussearch (0.")
41 pcl::normalestimation<t> p; Features (1/4) p.setinputcloud (data); p.setradiussearch (0.01);
; p.setradiussearch (0.")
42 pcl::normalestimation<t> p; Features (2/4) p.setinputcloud (data); p.setradiussearch (0.01);
43 pcl::boundaryestimation<t,n> p; p.setinputcloud (data); p.setinputnormals (normals); p.setradiussearch (0.01); Features (3/4)
; p.setinputnormals (normals); p.")
44 pcl::principalcurvaturesestimation<t,n> p; p.setinputcloud (data); p.setinputnormals (normals); p.setradiussearch (0.01); Features (4/4)

")
45 What scale to choose? Feature Persistence bad scale (too small) good scale Selecting the right scale (k-neighborhood) is problematic:
46 Consistent Normal Orientation Local Features (4-5/5) Before Extended Gaussian Image Orientation consistent for: 1. registration 2. feature estimation 3. surface representation normals on the Gaussian sphere should be in the same half-space



47 Consistent Normal Orientation Local Features (4-5/5) Before After (vsolet slookatsomecode : i or: propagate consistency through an EMST
3D Perception. Point Cloud Library.
 Introduction Motivation Acquisition Data representation Storage PCL PCL Examples 3D Perception.. November 2, 2010 [Introduction] Motivation Acquisition Data representation Storage PCL PCL Examples Outline
Introduction Motivation Acquisition Data representation Storage PCL PCL Examples 3D Perception.. November 2, 2010 [Introduction] Motivation Acquisition Data representation Storage PCL PCL Examples Outline
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Corner Detection. GV12/3072 Image Processing.
 Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Efficient Surface and Feature Estimation in RGBD
 Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Scale Invariant Feature Transform by David Lowe
 Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Image Matching. AKA: Image registration, the correspondence problem, Tracking,
 Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Multi-view 3D reconstruction. Problem formulation Projective ambiguity Rectification Autocalibration Feature points and their matching
 Multi-view 3D reconstruction Problem formulation Projective ambiguity Rectification Autocalibration Feature points and their matching Problem Given m images of n scene points captured from different viewpoints,
Multi-view 3D reconstruction Problem formulation Projective ambiguity Rectification Autocalibration Feature points and their matching Problem Given m images of n scene points captured from different viewpoints,
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition. Isma Hadji G. N. DeSouza
 Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
ENHANCING PCL USABILITY: A GUI FRONT-END, INTERFACING WITH VTK, IMAGE PROCESSING ON POINT CLOUDS, AND MORE! David Doria
 ENHANCING PCL USABILITY: A GUI FRONT-END, INTERFACING WITH VTK, IMAGE PROCESSING ON POINT CLOUDS, AND MORE! David Doria GSOC PROJECTS Object Reconstruction Web-based applications Recognition module improvements
ENHANCING PCL USABILITY: A GUI FRONT-END, INTERFACING WITH VTK, IMAGE PROCESSING ON POINT CLOUDS, AND MORE! David Doria GSOC PROJECTS Object Reconstruction Web-based applications Recognition module improvements
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
PS3 Review Session. Kuan Fang CS231A 02/16/2018
 PS3 Review Session Kuan Fang CS231A 02/16/2018 Overview Space carving Single Object Recognition via SIFT Histogram of Oriented Gradients (HOG) Space Carving Objective: Implement the process of space carving.
PS3 Review Session Kuan Fang CS231A 02/16/2018 Overview Space carving Single Object Recognition via SIFT Histogram of Oriented Gradients (HOG) Space Carving Objective: Implement the process of space carving.
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Designing Applications that See Lecture 7: Object Recognition
 stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Visual Tracking (1) Pixel-intensity-based methods
 Pixel-intensity-based methods") Intelligent Control Systems Visual Tracking (1) Pixel-intensity-based methods Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Pixel-intensity-based methods Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Comparison of Feature Detection and Matching Approaches: SIFT and SURF
 GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM INTRODUCTION
 A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Object Detection by Point Feature Matching using Matlab
 Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Towards 3D Point Cloud Based Object Maps for Household Environments
 Towards 3D Point Cloud Based Object Maps for Household Environments Radu Bogdan Rusu, Zoltan Csaba Marton, Nico Blodow, Mihai Dolha, Michael Beetz Technische Universität München, Computer Science Department,
Towards 3D Point Cloud Based Object Maps for Household Environments Radu Bogdan Rusu, Zoltan Csaba Marton, Nico Blodow, Mihai Dolha, Michael Beetz Technische Universität München, Computer Science Department,
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
3D SLAM in texture-less environments using rank order statistics Khalid Yousif, Alireza Bab-Hadiashar and Reza Hoseinnezhad
 3D SLAM in texture-less environments using rank order statistics Khalid Yousif, Alireza Bab-Hadiashar and Reza Hoseinnezhad School of Aerospace, Mechanical and Manufacturing Engineering, RMIT University,
3D SLAM in texture-less environments using rank order statistics Khalid Yousif, Alireza Bab-Hadiashar and Reza Hoseinnezhad School of Aerospace, Mechanical and Manufacturing Engineering, RMIT University,
Fast and Robust 3D Feature Extraction from Sparse Point Clouds
 Fast and Robust 3D Feature Extraction from Sparse Point Clouds Jacopo Serafin 1, Edwin Olson 2 and Giorgio Grisetti 1 Abstract Matching 3D point clouds, a critical operation in map building and localization,
Fast and Robust 3D Feature Extraction from Sparse Point Clouds Jacopo Serafin 1, Edwin Olson 2 and Giorgio Grisetti 1 Abstract Matching 3D point clouds, a critical operation in map building and localization,
Geometry based Repetition Detection for Urban Scene
 Geometry based Repetition Detection for Urban Scene Changchang Wu University of Washington Jan Michael Frahm UNC Chapel Hill Marc Pollefeys ETH Zürich Related Work Sparse Feature Matching [Loy et al. 06,
Geometry based Repetition Detection for Urban Scene Changchang Wu University of Washington Jan Michael Frahm UNC Chapel Hill Marc Pollefeys ETH Zürich Related Work Sparse Feature Matching [Loy et al. 06,
From Structure-from-Motion Point Clouds to Fast Location Recognition
 From Structure-from-Motion Point Clouds to Fast Location Recognition Arnold Irschara1;2, Christopher Zach2, Jan-Michael Frahm2, Horst Bischof1 1Graz University of Technology firschara, bischofg@icg.tugraz.at
From Structure-from-Motion Point Clouds to Fast Location Recognition Arnold Irschara1;2, Christopher Zach2, Jan-Michael Frahm2, Horst Bischof1 1Graz University of Technology firschara, bischofg@icg.tugraz.at
CSC494: Individual Project in Computer Science
 CSC494: Individual Project in Computer Science Seyed Kamyar Seyed Ghasemipour Department of Computer Science University of Toronto kamyar@cs.toronto.edu Abstract One of the most important tasks in computer
CSC494: Individual Project in Computer Science Seyed Kamyar Seyed Ghasemipour Department of Computer Science University of Toronto kamyar@cs.toronto.edu Abstract One of the most important tasks in computer
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Implementing the Scale Invariant Feature Transform(SIFT) Method
 Method") Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
3D Object Recognition using Multiclass SVM-KNN
 3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
Introduction to PCL: The Point Cloud Library
 Introduction to PCL: The Point Cloud Library Basic topics Alberto Pretto Thanks to Radu Bogdan Rusu, Bastian Steder and Jeff Delmerico for some of the slides! Point clouds: a definition A point cloud is
Introduction to PCL: The Point Cloud Library Basic topics Alberto Pretto Thanks to Radu Bogdan Rusu, Bastian Steder and Jeff Delmerico for some of the slides! Point clouds: a definition A point cloud is
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Introduction to PCL: The Point Cloud Library
 Introduction to PCL: The Point Cloud Library 1 - basic topics Alberto Pretto Thanks to Radu Bogdan Rusu, Bastian Steder and Jeff Delmerico for some of the slides! Contact Alberto Pretto, PhD Assistant
Introduction to PCL: The Point Cloud Library 1 - basic topics Alberto Pretto Thanks to Radu Bogdan Rusu, Bastian Steder and Jeff Delmerico for some of the slides! Contact Alberto Pretto, PhD Assistant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
3D Reconstruction From Multiple Views Based on Scale-Invariant Feature Transform. Wenqi Zhu
 3D Reconstruction From Multiple Views Based on Scale-Invariant Feature Transform Wenqi Zhu wenqizhu@buffalo.edu Problem Statement! 3D reconstruction 3D reconstruction is a problem of recovering depth information
3D Reconstruction From Multiple Views Based on Scale-Invariant Feature Transform Wenqi Zhu wenqizhu@buffalo.edu Problem Statement! 3D reconstruction 3D reconstruction is a problem of recovering depth information
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
A Novel Algorithm for Color Image matching using Wavelet-SIFT
 International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
SIFT: Scale Invariant Feature Transform
 1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Using Geometric Blur for Point Correspondence
 1 Using Geometric Blur for Point Correspondence Nisarg Vyas Electrical and Computer Engineering Department, Carnegie Mellon University, Pittsburgh, PA Abstract In computer vision applications, point correspondence
1 Using Geometric Blur for Point Correspondence Nisarg Vyas Electrical and Computer Engineering Department, Carnegie Mellon University, Pittsburgh, PA Abstract In computer vision applications, point correspondence
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest