Scenario/Motivation. Introduction System Overview Surface Estimation Geometric Category and Model Applications Conclusions
|
|
|
- Warren Hines
- 5 years ago
- Views:
Transcription
1 Single View Categorization and Modelling Nico Blodow, Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München IROS 2010 Workshop on Defining and Solving Realistic Perception Problems in Personal Robotics Taipei, October 2010







2 Scenario/Motivation! # #! % # # % #! &
3 Motivation Scenario: our robot is operating in a household environment, we have tables with objects on them, we want to reason about their arrangements, and perform manipulation. Problem: classify the clusters to find out their semantic meaning for reasoning, reconstruct the clusters to be able to grasp them. Solution: RSD, GRSD, SVM, Model Reconstruction


4 System Overview 1 1, ( ) + #! % & % 222 / 0..
5 System Overview 1 1, ( ) + #! % & % 222 / 0..
6 System Overview!






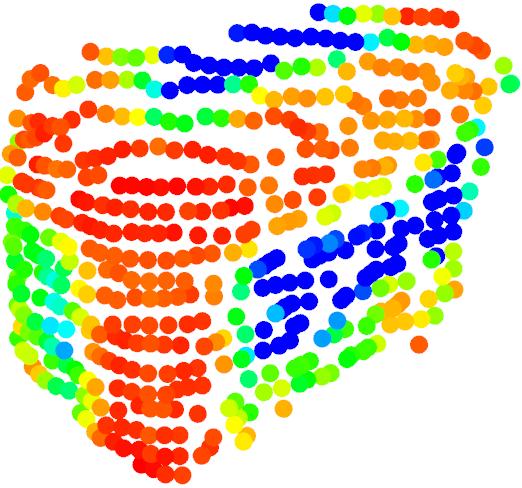
7 Segmentation and Smoothing of Data Detect tables and segment cluster in Euclidean sense Smooth data and compute accurate surface normals using Moving Least Squares fit of polynomial surfaces
 Local")





")
8 Radius-based Surface Descriptor (RSD) Local variation of normal angles by distance: Synthetic Data plane sphere sphere side corner cylinder cylinder top cylinder side edge handle Real Data small cylinder medium cylinder big cylinder handle1 handle2 handle3 Estimate minimum and maximum curvature radius from minimum and maximum angle/distance pairs: d (α) = 2r 1 cos(α) d (α) = rα + rα O(α5 ) d = rα

9 Radius-based Surface Descriptor (RSD) Voxelization of space and simple feature estimation to reduce computational complexity Since the minimum and maximum radius have physical meanings, simple intuitive rule-based local surface classification is possible [IROS2010:] Marton et al., General 3D Modelling of Novel Objects from a Single View


10 Global Radius-based Surface Descriptor A global feature is computed from each cluster by counting transitions between surface types Use geometric class to decide on what model to fit Each view is considered a training example, but only object category is checked Total time is around 0.2 seconds, from raw clusters to geometric category [Humanoids2010:] Marton, Pangercic, Hierarchical Object Geometric Categorization and Appearance Classification for Mobile Manipulation

11 Geometric Categorization using GRSD Categories are hand-picked for now, automatic grouping would be preferred The object categories of previously unseen views was successfully found in 89% of the time Each category has a best fitting geometric model whose parameters will be estimated
12 Model Reconstruction (Box, Cylinder) Box fitting: we fit a rectangular model directly to the points having normals perpendicular to the up axis (as we assume boxes to be standing on one of their sides). Cylinder fitting: we use a SaC approach which is based on the observation that on a cylinder surface, all normals are orthogonal to the cylinder axis, and intersect it. We consider the two lines defined by two sample points and their corresponding normals as two skew lines, and the shortest connecting line segment as the axis. Determining the radius is then a matter of computing the distance of one of the sample points to the axis.


13 Model Reconstruction (Box, Cylinder)
 Non-linear minimization using Levenberg-Marquardt for axis, and least")

14 Model Reconstruction (Arbitrary Rot.-Sym.) Non-linear minimization using Levenberg-Marquardt for axis, and least squares fit for contour m d l,l ( a, a, p i, n i ) 2 i=0 Needs checking of the generated surface for plausibility (parts only in occupied and occluded space) as in Blodow et. al. [Humanoids2009]
15 Short Demonstration roslaunch cloud_algos rotational_estimation_triangulation.launch







16 Grasping of Unmodelled Objects Estimating surface type and reconstruction using symmetries *
! * +! # #! % # # % #!")
 :- onplane(plane),")
, uniqueid(id),")
, Perceived).")
![[IROS2010:] Pangercic et al.](/docs-images/90/103681120/images/17-8.jpg ", Combining Perception and Knowledge")
17 Interpretations of Scenes Missing Objects )! * +! # #! % # # % #! & ' ( perceivedobjectsonplane(plane, Perceived) :- onplane(plane), setof(obj-hyp, ( on(obj, Plane), category(obj,cat), uniqueid(id), objectinstace(obj,knownobj), Obj-Hyp = [Id,Obj,Cat,KnownObj]), Perceived). [IROS2010:] Pangercic et al., Combining Perception and Knowledge Processing for Everyday Manipulation
18 Pros and Cons Advantages automatic model reconstruction for previously unseen objects more accurate and robust grasping through completed geometric model potential speedup of visual classification based on geometrical info connection to high-level reasoning Constraints segmentable horizontal supporting plane physically separated objects apriori trained geometric categories objects with planar and rotational symmetry (plus handles)

19 Discussion Thanks! Intelligent Autonomus Systems Group: TUM ROS Package Repository: tum-ros-pkg/mapping/ Contact:
Robots Towards Making Sense of 3D Data
 Nico Blodow, Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RSS 2010 Workshop on Strategies and Evaluation for Mobile Manipulation
Nico Blodow, Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RSS 2010 Workshop on Strategies and Evaluation for Mobile Manipulation
Efficient Surface and Feature Estimation in RGBD
 Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
General 3D Modelling of Novel Objects from a Single View
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan General 3D Modelling of Novel Objects from a Single View Zoltan-Csaba Marton, Dejan Pangercic,
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan General 3D Modelling of Novel Objects from a Single View Zoltan-Csaba Marton, Dejan Pangercic,
General 3D Modelling of Novel Objects from a Single View
 General 3D Modelling of Novel Objects from a Single View Zoltan-Csaba Marton, Dejan Pangercic, Nico Blodow, Jonathan Kleinehellefort, Michael Beetz Intelligent Autonomous Systems, Technische Universität
General 3D Modelling of Novel Objects from a Single View Zoltan-Csaba Marton, Dejan Pangercic, Nico Blodow, Jonathan Kleinehellefort, Michael Beetz Intelligent Autonomous Systems, Technische Universität
Hierarchical Object Geometric Categorization and Appearance Classification for Mobile Manipulation
 Hierarchical Object Geometric Categorization and Appearance Classification for Mobile Manipulation Zoltan-Csaba Marton, Dejan Pangercic, Radu Bogdan Rusu, Andreas Holzbach, Michael Beetz Intelligent Autonomous
Hierarchical Object Geometric Categorization and Appearance Classification for Mobile Manipulation Zoltan-Csaba Marton, Dejan Pangercic, Radu Bogdan Rusu, Andreas Holzbach, Michael Beetz Intelligent Autonomous
Learning Informative Point Classes for the Acquisition of Object Model Maps
 Learning Informative Point Classes for the Acquisition of Object Model Maps Radu Bogdan Rusu, Zoltan Csaba Marton, Nico Blodow, Michael Beetz Intelligent Autonomous Systems, Technische Universität München,
Learning Informative Point Classes for the Acquisition of Object Model Maps Radu Bogdan Rusu, Zoltan Csaba Marton, Nico Blodow, Michael Beetz Intelligent Autonomous Systems, Technische Universität München,
Estimation of Surface Geometries in Point Clouds for the Manipulation of Novel Household Objects
 Estimation of Surface Geometries in Point Clouds for the Manipulation of Novel Household Objects Siddarth Jain and Brenna Argall Northwestern University, Evanston, IL, USA 60208 Shirley Ryan AbilityLab,
Estimation of Surface Geometries in Point Clouds for the Manipulation of Novel Household Objects Siddarth Jain and Brenna Argall Northwestern University, Evanston, IL, USA 60208 Shirley Ryan AbilityLab,
Robustly Segmenting Cylindrical and Box-like Objects in Cluttered Scenes using Depth Cameras
 Robustly Segmenting Cylindrical and Box-like Objects in Cluttered Scenes using Depth Cameras Lucian Cosmin Goron1, Zoltan-Csaba Marton2, Gheorghe Lazea1, Michael Beetz2 lucian.goron@aut.utcluj.ro, marton@cs.tum.edu,
Robustly Segmenting Cylindrical and Box-like Objects in Cluttered Scenes using Depth Cameras Lucian Cosmin Goron1, Zoltan-Csaba Marton2, Gheorghe Lazea1, Michael Beetz2 lucian.goron@aut.utcluj.ro, marton@cs.tum.edu,
Voxelized Shape and Color Histograms for RGB-D
 Voxelized Shape and Color Histograms for RGB-D Asako Kanezaki, Zoltan-Csaba Marton, Dejan Pangercic, Tatsuya Harada, Yasuo Kuniyoshi, Michael Beetz ** {kanezaki, harada, kuniyosh}@isi.imi.i.u-tokyo.ac.jp,
Voxelized Shape and Color Histograms for RGB-D Asako Kanezaki, Zoltan-Csaba Marton, Dejan Pangercic, Tatsuya Harada, Yasuo Kuniyoshi, Michael Beetz ** {kanezaki, harada, kuniyosh}@isi.imi.i.u-tokyo.ac.jp,
Object Categorization in Clutter using Additive Features and Hashing of Part-graph Descriptors
 Object Categorization in Clutter using Additive Features and Hashing of Part-graph Descriptors Zoltan-Csaba Marton, Ferenc Balint-Benczedi, Florian Seidel, Lucian Cosmin Goron, and Michael Beetz Intelligent
Object Categorization in Clutter using Additive Features and Hashing of Part-graph Descriptors Zoltan-Csaba Marton, Ferenc Balint-Benczedi, Florian Seidel, Lucian Cosmin Goron, and Michael Beetz Intelligent
Detecting Partially Occluded Objects via Segmentation and Validation
 IEEE WORKSHOP ON ROBOT VISION (WORV), 2013 Detecting Partially Occluded Objects via Segmentation and Validation Martin Levihn Matthew Dutton Alexander J. B. Trevor Mike Silman Georgia Institute of Technology
IEEE WORKSHOP ON ROBOT VISION (WORV), 2013 Detecting Partially Occluded Objects via Segmentation and Validation Martin Levihn Matthew Dutton Alexander J. B. Trevor Mike Silman Georgia Institute of Technology
9. Three Dimensional Object Representations
 9. Three Dimensional Object Representations Methods: Polygon and Quadric surfaces: For simple Euclidean objects Spline surfaces and construction: For curved surfaces Procedural methods: Eg. Fractals, Particle
9. Three Dimensional Object Representations Methods: Polygon and Quadric surfaces: For simple Euclidean objects Spline surfaces and construction: For curved surfaces Procedural methods: Eg. Fractals, Particle
Action Recognition in Intelligent Environments using Point Cloud Features Extracted from Silhouette Sequences
 Action Recognition in Intelligent Environments using Point Cloud Features Extracted from Silhouette Sequences Radu Bogdan Rusu, Jan Bandouch, Zoltan Csaba Marton, Nico Blodow, Michael Beetz Intelligent
Action Recognition in Intelligent Environments using Point Cloud Features Extracted from Silhouette Sequences Radu Bogdan Rusu, Jan Bandouch, Zoltan Csaba Marton, Nico Blodow, Michael Beetz Intelligent
Design Intent of Geometric Models
 School of Computer Science Cardiff University Design Intent of Geometric Models Frank C. Langbein GR/M78267 GR/S69085/01 NUF-NAL 00638/G Auckland University 15th September 2004; Version 1.1 Design Intent
School of Computer Science Cardiff University Design Intent of Geometric Models Frank C. Langbein GR/M78267 GR/S69085/01 NUF-NAL 00638/G Auckland University 15th September 2004; Version 1.1 Design Intent
Towards 3D Point Cloud Based Object Maps for Household Environments
 Towards 3D Point Cloud Based Object Maps for Household Environments Radu Bogdan Rusu, Zoltan Csaba Marton, Nico Blodow, Mihai Dolha, Michael Beetz Technische Universität München, Computer Science Department,
Towards 3D Point Cloud Based Object Maps for Household Environments Radu Bogdan Rusu, Zoltan Csaba Marton, Nico Blodow, Mihai Dolha, Michael Beetz Technische Universität München, Computer Science Department,
Design Intent of Geometric Models
 School of Computer Science Cardiff University Design Intent of Geometric Models Frank C. Langbein GR/M78267 GR/S69085/01 NUF-NAL 00638/G Massey University 22nd September 2004; Version 1.0 Design Intent
School of Computer Science Cardiff University Design Intent of Geometric Models Frank C. Langbein GR/M78267 GR/S69085/01 NUF-NAL 00638/G Massey University 22nd September 2004; Version 1.0 Design Intent
Segmentation of point clouds
 Segmentation of point clouds George Vosselman INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Extraction of information from point clouds 1 Segmentation algorithms Extraction
Segmentation of point clouds George Vosselman INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Extraction of information from point clouds 1 Segmentation algorithms Extraction
Robot-to-Camera Calibration: A Generic Approach Using 6D Detections
 Robot-to-Camera Calibration: A Generic Approach Using 6D Detections Christian Nissler and Zoltan-Csaba Marton Institute of Robotics and Mechatronics, German Aerospace Center (DLR) Muenchner Str. 2, D-82234
Robot-to-Camera Calibration: A Generic Approach Using 6D Detections Christian Nissler and Zoltan-Csaba Marton Institute of Robotics and Mechatronics, German Aerospace Center (DLR) Muenchner Str. 2, D-82234
Functional Object Mapping of Kitchen Environments
 Functional Object Mapping of Kitchen Environments Radu Bogdan Rusu, Zoltan Csaba Marton, Nico Blodow, Mihai Emanuel Dolha, Michael Beetz Intelligent Autonomous Systems, Technische Universität München {rusu,marton,blodow,dolha,beetz}@cs.tum.edu
Functional Object Mapping of Kitchen Environments Radu Bogdan Rusu, Zoltan Csaba Marton, Nico Blodow, Mihai Emanuel Dolha, Michael Beetz Intelligent Autonomous Systems, Technische Universität München {rusu,marton,blodow,dolha,beetz}@cs.tum.edu
Object Class and Instance Recognition on RGB-D Data
 Object Class and Instance Recognition on RGB-D Data Viktor Seib, Susanne Christ-Friedmann, Susanne Thierfelder, Dietrich Paulus Active Vision Group (AGAS), University of Koblenz-Landau Universitätsstr.
Object Class and Instance Recognition on RGB-D Data Viktor Seib, Susanne Christ-Friedmann, Susanne Thierfelder, Dietrich Paulus Active Vision Group (AGAS), University of Koblenz-Landau Universitätsstr.
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Calypso Construction Features. Construction Features 1
 Calypso 1 The Construction dropdown menu contains several useful construction features that can be used to compare two other features or perform special calculations. Construction features will show up
Calypso 1 The Construction dropdown menu contains several useful construction features that can be used to compare two other features or perform special calculations. Construction features will show up
Rectangular Coordinates in Space
 Rectangular Coordinates in Space Philippe B. Laval KSU Today Philippe B. Laval (KSU) Rectangular Coordinates in Space Today 1 / 11 Introduction We quickly review one and two-dimensional spaces and then
Rectangular Coordinates in Space Philippe B. Laval KSU Today Philippe B. Laval (KSU) Rectangular Coordinates in Space Today 1 / 11 Introduction We quickly review one and two-dimensional spaces and then
An efficient alternative approach for home furniture detection and localization by an autonomous mobile robot
 An efficient alternative approach for home furniture detection and localization by an autonomous mobile robot Oscar Alonso-Ramirez, Yaser Aguas-Garcia, Antonio Marin-Hernandez, Homero V. Rios-Figueroa,
An efficient alternative approach for home furniture detection and localization by an autonomous mobile robot Oscar Alonso-Ramirez, Yaser Aguas-Garcia, Antonio Marin-Hernandez, Homero V. Rios-Figueroa,
POSITION, DIRECTION AND MOVEMENT Year 1 Year 2 Year 3 Year 4 Year 5 Year 6 Use mathematical
 POSITION, DIRECTION AND MOVEMENT Year 1 Year 2 Year 3 Year 4 Year 5 Year 6 Use mathematical Use mathematical Describe positions on a Identify, describe and vocabulary to describe vocabulary to describe
POSITION, DIRECTION AND MOVEMENT Year 1 Year 2 Year 3 Year 4 Year 5 Year 6 Use mathematical Use mathematical Describe positions on a Identify, describe and vocabulary to describe vocabulary to describe
Vectors and the Geometry of Space
 Vectors and the Geometry of Space In Figure 11.43, consider the line L through the point P(x 1, y 1, z 1 ) and parallel to the vector. The vector v is a direction vector for the line L, and a, b, and c
Vectors and the Geometry of Space In Figure 11.43, consider the line L through the point P(x 1, y 1, z 1 ) and parallel to the vector. The vector v is a direction vector for the line L, and a, b, and c
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Study Guide and Review
 State whether each sentence is or false. If false, replace the underlined term to make a sentence. 1. Euclidean geometry deals with a system of points, great circles (lines), and spheres (planes). false,
State whether each sentence is or false. If false, replace the underlined term to make a sentence. 1. Euclidean geometry deals with a system of points, great circles (lines), and spheres (planes). false,
Constraint-Based Task Programming with CAD Semantics: From Intuitive Specification to Real-Time Control
 Constraint-Based Task Programming with CAD Semantics: From Intuitive Specification to Real-Time Control Nikhil Somani, Andre Gaschler, Markus Rickert, Alexander Perzylo, and Alois Knoll Abstract In this
Constraint-Based Task Programming with CAD Semantics: From Intuitive Specification to Real-Time Control Nikhil Somani, Andre Gaschler, Markus Rickert, Alexander Perzylo, and Alois Knoll Abstract In this
WE expect the future World Wide Web to include a. Using Web Catalogs to Locate and Categorize Unknown Furniture Pieces in 3D Laser Scans
 Using Web Catalogs to Locate and Categorize Unknown Furniture Pieces in 3D Laser Scans Oscar Martinez Mozos, Member, IEEE, Zoltan-Csaba Marton, Member, IEEE, and Michael Beetz, Member, IEEE, Abstract In
Using Web Catalogs to Locate and Categorize Unknown Furniture Pieces in 3D Laser Scans Oscar Martinez Mozos, Member, IEEE, Zoltan-Csaba Marton, Member, IEEE, and Michael Beetz, Member, IEEE, Abstract In
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
DD2429 Computational Photography :00-19:00
 . Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
. Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
Geometric Algebra. 8. Conformal Geometric Algebra. Dr Chris Doran ARM Research
 Geometric Algebra 8. Conformal Geometric Algebra Dr Chris Doran ARM Research Motivation Projective geometry showed that there is considerable value in treating points as vectors Key to this is a homogeneous
Geometric Algebra 8. Conformal Geometric Algebra Dr Chris Doran ARM Research Motivation Projective geometry showed that there is considerable value in treating points as vectors Key to this is a homogeneous
CREATING 3D WRL OBJECT BY USING 2D DATA
 ISSN : 0973-7391 Vol. 3, No. 1, January-June 2012, pp. 139-142 CREATING 3D WRL OBJECT BY USING 2D DATA Isha 1 and Gianetan Singh Sekhon 2 1 Department of Computer Engineering Yadavindra College of Engineering,
ISSN : 0973-7391 Vol. 3, No. 1, January-June 2012, pp. 139-142 CREATING 3D WRL OBJECT BY USING 2D DATA Isha 1 and Gianetan Singh Sekhon 2 1 Department of Computer Engineering Yadavindra College of Engineering,
INFERENCE OF SEGMENTED, VOLUMETRIC SHAPE FROM INTENSITY IMAGES
 INFERENCE OF SEGMENTED, VOLUMETRIC SHAPE FROM INTENSITY IMAGES Parag Havaldar and Gérard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, California
INFERENCE OF SEGMENTED, VOLUMETRIC SHAPE FROM INTENSITY IMAGES Parag Havaldar and Gérard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, California
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Today. Today. Introduction. Matrices. Matrices. Computergrafik. Transformations & matrices Introduction Matrices
 Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
L1 - Introduction. Contents. Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming
 L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
A triangle that has three acute angles Example:
 1. acute angle : An angle that measures less than a right angle (90 ). 2. acute triangle : A triangle that has three acute angles 3. angle : A figure formed by two rays that meet at a common endpoint 4.
1. acute angle : An angle that measures less than a right angle (90 ). 2. acute triangle : A triangle that has three acute angles 3. angle : A figure formed by two rays that meet at a common endpoint 4.
Junior Circle Meeting 9 Commutativity and Inverses. May 30, We are going to examine different ways to transform the square below:
 Junior Circle Meeting 9 Commutativity and Inverses May 0, 2010 We are going to examine different ways to transform the square below: Just as with the triangle from last week, we are going to examine flips
Junior Circle Meeting 9 Commutativity and Inverses May 0, 2010 We are going to examine different ways to transform the square below: Just as with the triangle from last week, we are going to examine flips
CS354 Computer Graphics Rotations and Quaternions
 Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Standard 2.0 Knowledge of Geometry: Students will apply the properties of one-,
 VSC - Mathematics Print pages on legal paper, landscape mode. Grade PK Grade K Grade 1 Grade 2 Grade 3 Grade 4 Grade 5 Grade 6 Grade 7 Grade 8 Geometry: Students will apply the properties of one-, two-,
VSC - Mathematics Print pages on legal paper, landscape mode. Grade PK Grade K Grade 1 Grade 2 Grade 3 Grade 4 Grade 5 Grade 6 Grade 7 Grade 8 Geometry: Students will apply the properties of one-, two-,
16.6. Parametric Surfaces. Parametric Surfaces. Parametric Surfaces. Vector Calculus. Parametric Surfaces and Their Areas
 16 Vector Calculus 16.6 and Their Areas Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. and Their Areas Here we use vector functions to describe more general
16 Vector Calculus 16.6 and Their Areas Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. and Their Areas Here we use vector functions to describe more general
Semantic RGB-D Perception for Cognitive Robots
 Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
The figures below are all prisms. The bases of these prisms are shaded, and the height (altitude) of each prism marked by a dashed line:
 of each prism marked by a dashed line:") Prisms Most of the solids you ll see on the Math IIC test are prisms or variations on prisms. A prism is defined as a geometric solid with two congruent bases that lie in parallel planes. You can create
Prisms Most of the solids you ll see on the Math IIC test are prisms or variations on prisms. A prism is defined as a geometric solid with two congruent bases that lie in parallel planes. You can create
7 Fractions. Number Sense and Numeration Measurement Geometry and Spatial Sense Patterning and Algebra Data Management and Probability
 7 Fractions GRADE 7 FRACTIONS continue to develop proficiency by using fractions in mental strategies and in selecting and justifying use; develop proficiency in adding and subtracting simple fractions;
7 Fractions GRADE 7 FRACTIONS continue to develop proficiency by using fractions in mental strategies and in selecting and justifying use; develop proficiency in adding and subtracting simple fractions;
This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane?
 Intersecting Circles This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane? This is a problem that a programmer might have to solve, for example,
Intersecting Circles This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane? This is a problem that a programmer might have to solve, for example,
Lecture 3 Sections 2.2, 4.4. Mon, Aug 31, 2009
 Model s Lecture 3 Sections 2.2, 4.4 World s Eye s Clip s s s Window s Hampden-Sydney College Mon, Aug 31, 2009 Outline Model s World s Eye s Clip s s s Window s 1 2 3 Model s World s Eye s Clip s s s Window
Model s Lecture 3 Sections 2.2, 4.4 World s Eye s Clip s s s Window s Hampden-Sydney College Mon, Aug 31, 2009 Outline Model s World s Eye s Clip s s s Window s 1 2 3 Model s World s Eye s Clip s s s Window
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
A 3D Pattern for Post Estimation for Object Capture
 A 3D Pattern for Post Estimation for Object Capture Lei Wang, Cindy Grimm, and Robert Pless Department of Computer Science and Engineering Washington University One Brookings Drive, St. Louis, MO, 63130
A 3D Pattern for Post Estimation for Object Capture Lei Wang, Cindy Grimm, and Robert Pless Department of Computer Science and Engineering Washington University One Brookings Drive, St. Louis, MO, 63130
Master s Thesis: Real-Time Object Shape Perception via Force/Torque Sensor
 S. Rau TAMS-Oberseminar 1 / 25 MIN-Fakultät Fachbereich Informatik Master s Thesis: Real-Time Object Shape Perception via Force/Torque Sensor Current Status Stephan Rau Universität Hamburg Fakultät für
S. Rau TAMS-Oberseminar 1 / 25 MIN-Fakultät Fachbereich Informatik Master s Thesis: Real-Time Object Shape Perception via Force/Torque Sensor Current Status Stephan Rau Universität Hamburg Fakultät für
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS
 METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
Working with the BCC Z Space II Filter
 Working with the BCC Z Space II Filter Normally, if you create an effect with multiple DVE layers, each layer is rendered separately. The layer that is topmost in the timeline overlaps all other layers,
Working with the BCC Z Space II Filter Normally, if you create an effect with multiple DVE layers, each layer is rendered separately. The layer that is topmost in the timeline overlaps all other layers,
Smarter Balanced Vocabulary (from the SBAC test/item specifications)
") Example: Smarter Balanced Vocabulary (from the SBAC test/item specifications) Notes: Most terms area used in multiple grade levels. You should look at your grade level and all of the previous grade levels.
Example: Smarter Balanced Vocabulary (from the SBAC test/item specifications) Notes: Most terms area used in multiple grade levels. You should look at your grade level and all of the previous grade levels.
Geometry and Gravitation
 Chapter 15 Geometry and Gravitation 15.1 Introduction to Geometry Geometry is one of the oldest branches of mathematics, competing with number theory for historical primacy. Like all good science, its
Chapter 15 Geometry and Gravitation 15.1 Introduction to Geometry Geometry is one of the oldest branches of mathematics, competing with number theory for historical primacy. Like all good science, its
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy
 Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy Sharjeel Anwar, Dr. Shoaib, Taosif Iqbal, Mohammad Saqib Mansoor, Zubair
Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy Sharjeel Anwar, Dr. Shoaib, Taosif Iqbal, Mohammad Saqib Mansoor, Zubair
Acquisition of a Dense 3D Model Database for Robotic Vision
 Acquisition of a Dense 3D Model Database for Robotic Vision Muhammad Zeeshan Zia, Ulrich Klank, and Michael Beetz Abstract Service Robots in real world environments need to have computer vision capability
Acquisition of a Dense 3D Model Database for Robotic Vision Muhammad Zeeshan Zia, Ulrich Klank, and Michael Beetz Abstract Service Robots in real world environments need to have computer vision capability
ME 115(b): Final Exam, Spring
: Final Exam, Spring") ME 115(b): Final Exam, Spring 2011-12 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
ME 115(b): Final Exam, Spring 2011-12 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
UNIT 10: Basic Geometric Shapes
 UNIT 10: Basic Geometric Shapes SOLIDCast allows you to create basic geometric shapes that can be part of a casting model. Some simple castings may be created entirely with this type of shape. In other
UNIT 10: Basic Geometric Shapes SOLIDCast allows you to create basic geometric shapes that can be part of a casting model. Some simple castings may be created entirely with this type of shape. In other
Assignment 2 : Projection and Homography
 TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
Projector Calibration for Pattern Projection Systems
 Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
SECTION SIX Teaching/ Learning Geometry. General Overview
 SECTION SIX Teaching/ Learning Geometry General Overview The learning outcomes for Geometry focus on the development of an understanding of the properties of three-dimensional and plane shapes and how
SECTION SIX Teaching/ Learning Geometry General Overview The learning outcomes for Geometry focus on the development of an understanding of the properties of three-dimensional and plane shapes and how
Combining Isometries- The Symmetry Group of a Square
 Combining Isometries- The Symmetry Group of a Square L.A. Romero August 22, 2017 1 The Symmetry Group of a Square We begin with a definition. Definition 1.1. The symmetry group of a figure is the collection
Combining Isometries- The Symmetry Group of a Square L.A. Romero August 22, 2017 1 The Symmetry Group of a Square We begin with a definition. Definition 1.1. The symmetry group of a figure is the collection
Figure (5) Kohonen Self-Organized Map
 Kohonen Self-Organized Map") 2- KOHONEN SELF-ORGANIZING MAPS (SOM) - The self-organizing neural networks assume a topological structure among the cluster units. - There are m cluster units, arranged in a one- or two-dimensional array;
2- KOHONEN SELF-ORGANIZING MAPS (SOM) - The self-organizing neural networks assume a topological structure among the cluster units. - There are m cluster units, arranged in a one- or two-dimensional array;
CS 465 Program 4: Modeller
 CS 465 Program 4: Modeller out: 30 October 2004 due: 16 November 2004 1 Introduction In this assignment you will work on a simple 3D modelling system that uses simple primitives and curved surfaces organized
CS 465 Program 4: Modeller out: 30 October 2004 due: 16 November 2004 1 Introduction In this assignment you will work on a simple 3D modelling system that uses simple primitives and curved surfaces organized
Seminar Heidelberg University
 Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Functions of Several Variables
 . Functions of Two Variables Functions of Several Variables Rectangular Coordinate System in -Space The rectangular coordinate system in R is formed by mutually perpendicular axes. It is a right handed
. Functions of Two Variables Functions of Several Variables Rectangular Coordinate System in -Space The rectangular coordinate system in R is formed by mutually perpendicular axes. It is a right handed
Escher s Circle Limit Anneke Bart Saint Louis University Introduction
 Escher s Circle Limit Anneke Bart Saint Louis University http://math.slu.edu/escher/ Introduction What are some of the most fundamental things we do in geometry? In the beginning we mainly look at lines,
Escher s Circle Limit Anneke Bart Saint Louis University http://math.slu.edu/escher/ Introduction What are some of the most fundamental things we do in geometry? In the beginning we mainly look at lines,
Lecture Outlines Chapter 26
 Lecture Outlines Chapter 26 11/18/2013 2 Chapter 26 Geometrical Optics Objectives: After completing this module, you should be able to: Explain and discuss with diagrams, reflection and refraction of light
Lecture Outlines Chapter 26 11/18/2013 2 Chapter 26 Geometrical Optics Objectives: After completing this module, you should be able to: Explain and discuss with diagrams, reflection and refraction of light
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Transformations in Ray Tracing. MIT EECS 6.837, Durand and Cutler
 Transformations in Ray Tracing Linear Algebra Review Session Tonight! 7:30 9 PM Last Time: Simple Transformations Classes of Transformations Representation homogeneous coordinates Composition not commutative
Transformations in Ray Tracing Linear Algebra Review Session Tonight! 7:30 9 PM Last Time: Simple Transformations Classes of Transformations Representation homogeneous coordinates Composition not commutative
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS INTRODUCTION
 DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Glossary of dictionary terms in the AP geometry units
 Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Acquiring Models of Rectangular 3D Objects for Robot Maps
 Acquiring Models of Rectangular 3D Objects for Robot Maps Derik Schröter and Michael Beetz Technische Universität München Boltzmannstr. 3, 85748 Garching b. München, Germany schroetdin.tum.de, beetzin.tum.de
Acquiring Models of Rectangular 3D Objects for Robot Maps Derik Schröter and Michael Beetz Technische Universität München Boltzmannstr. 3, 85748 Garching b. München, Germany schroetdin.tum.de, beetzin.tum.de
CATIA V5 Parametric Surface Modeling
 CATIA V5 Parametric Surface Modeling Version 5 Release 16 A- 1 Toolbars in A B A. Wireframe: Create 3D curves / lines/ points/ plane B. Surfaces: Create surfaces C. Operations: Join surfaces, Split & Trim
CATIA V5 Parametric Surface Modeling Version 5 Release 16 A- 1 Toolbars in A B A. Wireframe: Create 3D curves / lines/ points/ plane B. Surfaces: Create surfaces C. Operations: Join surfaces, Split & Trim
Polygonal representation of 3D urban terrain point-cloud data
 Polygonal representation of 3D urban terrain point-cloud data part I Borislav Karaivanov The research is supported by ARO MURI 23 February 2011 USC 1 Description of problem Assumptions: unstructured 3D
Polygonal representation of 3D urban terrain point-cloud data part I Borislav Karaivanov The research is supported by ARO MURI 23 February 2011 USC 1 Description of problem Assumptions: unstructured 3D
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras
 Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Object Recognition. The Chair Room
 Object Recognition high-level interpretations objects scene elements image elements raw images Object recognition object recognition is a typical goal of image analysis object recognition includes - object
Object Recognition high-level interpretations objects scene elements image elements raw images Object recognition object recognition is a typical goal of image analysis object recognition includes - object
Sculpting 3D Models. Glossary
 A Array An array clones copies of an object in a pattern, such as in rows and columns, or in a circle. Each object in an array can be transformed individually. Array Flyout Array flyout is available in
A Array An array clones copies of an object in a pattern, such as in rows and columns, or in a circle. Each object in an array can be transformed individually. Array Flyout Array flyout is available in
Geometry Spring 2017 Item Release
 Geometry Spring 2017 Item Release 1 Geometry Reporting Category: Congruence and Proof Question 2 16743 20512 Content Cluster: Use coordinates to prove simple geometric theorems algebraically and to verify
Geometry Spring 2017 Item Release 1 Geometry Reporting Category: Congruence and Proof Question 2 16743 20512 Content Cluster: Use coordinates to prove simple geometric theorems algebraically and to verify
GRADE 3 GRADE-LEVEL GOALS
 Content Strand: Number and Numeration Understand the Meanings, Uses, and Representations of Numbers Understand Equivalent Names for Numbers Understand Common Numerical Relations Place value and notation
Content Strand: Number and Numeration Understand the Meanings, Uses, and Representations of Numbers Understand Equivalent Names for Numbers Understand Common Numerical Relations Place value and notation
PITSCO Math Individualized Prescriptive Lessons (IPLs)
") Orientation Integers 10-10 Orientation I 20-10 Speaking Math Define common math vocabulary. Explore the four basic operations and their solutions. Form equations and expressions. 20-20 Place Value Define
Orientation Integers 10-10 Orientation I 20-10 Speaking Math Define common math vocabulary. Explore the four basic operations and their solutions. Form equations and expressions. 20-20 Place Value Define
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Laser-based Perception for Door and Handle Identification
 Laser-based Perception for Door and Handle Identification Radu Bogdan Rusu, Wim Meeussen, Sachin Chitta, Michael Beetz Intelligent Autonomous Systems, Department of Computer Science, Technische Universität
Laser-based Perception for Door and Handle Identification Radu Bogdan Rusu, Wim Meeussen, Sachin Chitta, Michael Beetz Intelligent Autonomous Systems, Department of Computer Science, Technische Universität
GTPS Curriculum Grade 6 Math
 14 days 4.16A2 Demonstrate a sense of the relative magnitudes of numbers. 4.1.6.A.7 Develop and apply number theory concepts in problem solving situations. Primes, factors, multiples Common multiples,
14 days 4.16A2 Demonstrate a sense of the relative magnitudes of numbers. 4.1.6.A.7 Develop and apply number theory concepts in problem solving situations. Primes, factors, multiples Common multiples,
Physically-Based Modeling and Animation. University of Missouri at Columbia
 Overview of Geometric Modeling Overview 3D Shape Primitives: Points Vertices. Curves Lines, polylines, curves. Surfaces Triangle meshes, splines, subdivision surfaces, implicit surfaces, particles. Solids
Overview of Geometric Modeling Overview 3D Shape Primitives: Points Vertices. Curves Lines, polylines, curves. Surfaces Triangle meshes, splines, subdivision surfaces, implicit surfaces, particles. Solids
Andy Project. Tushar Chugh, William Seto, Bikramjot Hanzra, Shiyu Dong, Tae-Hyung Kim. The Robotics Institute Carnegie Mellon University
 Andy Project Tushar Chugh, William Seto, Bikramjot Hanzra, Shiyu Dong, Tae-Hyung Kim. The Robotics Institute Carnegie Mellon University Mentors Special thanks to our mentors - Jean Oh -- Project Scientist,
Andy Project Tushar Chugh, William Seto, Bikramjot Hanzra, Shiyu Dong, Tae-Hyung Kim. The Robotics Institute Carnegie Mellon University Mentors Special thanks to our mentors - Jean Oh -- Project Scientist,
Autonomous Mapping of Kitchen Environments and Applications
 Autonomous Mapping of Kitchen Environments and Applications Zoltan Marton, Nico Blodow, Mihai Dolha, Moritz Tenorth, Radu Bogdan Rusu, Michael Beetz Intelligent Autonomous Systems, Technische Universität
Autonomous Mapping of Kitchen Environments and Applications Zoltan Marton, Nico Blodow, Mihai Dolha, Moritz Tenorth, Radu Bogdan Rusu, Michael Beetz Intelligent Autonomous Systems, Technische Universität
Chapter 26 Geometrical Optics
 Chapter 26 Geometrical Optics 1 Overview of Chapter 26 The Reflection of Light Forming Images with a Plane Mirror Spherical Mirrors Ray Tracing and the Mirror Equation The Refraction of Light Ray Tracing
Chapter 26 Geometrical Optics 1 Overview of Chapter 26 The Reflection of Light Forming Images with a Plane Mirror Spherical Mirrors Ray Tracing and the Mirror Equation The Refraction of Light Ray Tracing
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
TD2 : Stereoscopy and Tracking: solutions
 TD2 : Stereoscopy and Tracking: solutions Preliminary: λ = P 0 with and λ > 0. If camera undergoes the rigid transform: (R,T), then with, so that is the intrinsic parameter matrix. C(Cx,Cy,Cz) is the point
TD2 : Stereoscopy and Tracking: solutions Preliminary: λ = P 0 with and λ > 0. If camera undergoes the rigid transform: (R,T), then with, so that is the intrinsic parameter matrix. C(Cx,Cy,Cz) is the point
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Tutorial 3. Jun Xu, Teaching Asistant csjunxu/ February 16, COMP4134 Biometrics Authentication
 Tutorial 3 Jun Xu, Teaching Asistant http://www4.comp.polyu.edu.hk/ csjunxu/ COMP4134 Biometrics Authentication February 16, 2017 Table of Contents Problems Problem 1: Answer the questions Problem 2: Pattern
Tutorial 3 Jun Xu, Teaching Asistant http://www4.comp.polyu.edu.hk/ csjunxu/ COMP4134 Biometrics Authentication February 16, 2017 Table of Contents Problems Problem 1: Answer the questions Problem 2: Pattern
Section 7.2 Volume: The Disk Method
 Section 7. Volume: The Disk Method White Board Challenge Find the volume of the following cylinder: No Calculator 6 ft 1 ft V 3 1 108 339.9 ft 3 White Board Challenge Calculate the volume V of the solid
Section 7. Volume: The Disk Method White Board Challenge Find the volume of the following cylinder: No Calculator 6 ft 1 ft V 3 1 108 339.9 ft 3 White Board Challenge Calculate the volume V of the solid