Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping
|
|
|
- Dwight Hampton
- 6 years ago
- Views:
Transcription


1 Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
2 Motivation: Analogy to Documents O f a l l t h e s e n s o r y i m p r e s s i o n s proceeding to the brain, the visual experiences are the dominant ones. Our perception of the world around us is based essentially on the messages that reach the brain from our eyes. For a long time it sensory, was thought brain, that the retinal image was transmitted point by point to visual centers visual, in the perception, brain; the cerebral cortex was a movie screen, so to speak, upon which the image in the eye was projected. Through the discoveries of Hubel and eye, Wiesel cell, we now optical know that behind the origin of the visual perception in the brain there is a considerably nerve, more complicated image course of events. By following the visual impulses along Hubel, their path Wiesel to the various cell layers of the optical cortex, Hubel and Wiesel have been able to demonstrate that the message about the image falling on the retina undergoes a step-wise analysis in a system of nerve cells stored in columns. In this system each cell has its specific function and is responsible for a specific detail in the pattern of the retinal image. retinal, cerebral cortex, image source: L. Fei-Fei China is forecasting a trade surplus of $90bn ( 51bn) to $100bn this year, a threefold increase on 2004's $32bn. The Commerce Ministry said the surplus would be created by a predicted 30% jump in exports China, to $750bn, trade, compared with a 18% rise in imports to $660bn. The figures are likely to further annoy the US, surplus, which has commerce, long argued that China's exports are unfairly helped by a deliberately exports, undervalued imports, yuan. Beijing US, agrees the surplus is too high, but says the yuan, is only bank, one domestic, factor. Bank of China governor Zhou Xiaochuan said the country foreign, also needed increase, to do more to boost domestic demand so more goods stayed within the country. China trade, value increased the value of the yuan against the dollar by 2.1% in July and permitted it to trade within a narrow band, but the US wants the yuan to be allowed to trade freely. However, Beijing has made it clear that it will take its time and tread carefully before allowing the yuan to rise further in value. 2

3 Object Classification / Scene Recognition Analogy to documents: The content can be inferred from the frequency of words image source: L. Fei-Fei object bag of visual words 3
4 Bag of Visual Words Visual words = independent features face image source: L. Fei-Fei features 4




5 Bag of Visual Words Visual words = independent features Construct a dictionary of representative words codewords dictionary image source: L. Fei-Fei 5
6 Bag of Visual Words Visual words = independent features Construct a dictionary of representative words Represent the images based on a histogram of word occurrences (bag) Each detected feature is assigned to the closest entry in the codebook image source: L. Fei-Fei 6





7 Overview feature detection & representation codewords dictionary image representation slide adapted from: L. Fei-Fei
8 Feature Detection and Representation detected features in a set of training images (intensity changes) slide adapted from: L. Fei-Fei example patch 8

 slide adapted from: L.")
9 Feature Detection and Representation descriptor vectors (e.g., SIFT/SURF, consider local orientations of gradients) detected features in a set of training images (intensity changes) slide adapted from: L. Fei-Fei example patch 9
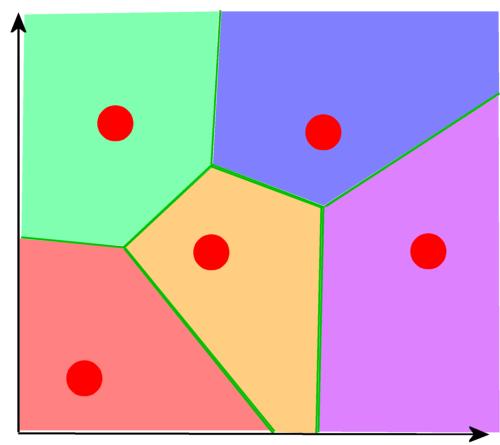
10 Learning the Dictionary slide adapted from: L. Fei-Fei
11 Learning the Dictionary cluster center = code words clustering, e.g., k-means slide adapted from: L. Fei-Fei

12 Example Codewords Dictionary Fei-Fei et al. 2005

13 Example Image Representation Build the histogram by assigning each detected feature to the closest entry in the codebook frequency.. slide adapted from: L. Fei-Fei codewords
14 Properties Bag-of-Words Compact summary of content Flexible to viewpoint, deformations Can be used for object / image classification by comparing the histograms (and applying some discriminative method) Ignores geometry Unclear how to choose optimal vocabulary Too small: Words not representative of all patches Too large: Artifacts, over-fitting 15
15 Appearance-Based Mapping with a Bag-of-Words Approach Based on M. Cummins & P. Newman FAB-MAP: Probabilistic Localization and Mapping in the Space of Appearance Int. Journal of Robotics Research, 2008 Appearance-only SLAM at Large Scale with FAB-MAP 2.0 Int. Journal of Robotics Research, 2010 Slides based on a presentation of Mark Cummins at R:SS

16 Motivation: Failure of Metric SLAM Appearance information can help to recover the pose estimate where metric approaches may fail 17
17 Appearance-Based Mapping (1) Recognize places based on visual appearance, even under difficult conditions Decide whether observations result from places already in the map, or from new, unseen places Difficult problem since different places may have similar visual appearance (and vice versa) Apply a bag-of-words approach Extension: Take into account that certain combinations of words co-occur 18
18 Appearance-Based Mapping (2) Parameterize the world as a set of discrete locations Estimate their positions in an appearance space Distinctive places can be recognized even after unknown motion (loop-closure) 19
19 Example current observation: map:

20








21 Learning the Visual Vocabulary feature extraction SURF


22 Clustering in Feature Space

23 Bag-of-Words Representation feature detection Word 753 quantize compute descriptor vectors...



![1 ]!](/docs-images/73/69061456/images/24-4.jpg "observation")

24 Inference in FAB-MAP map: new place current observation: Z = [ ]! observation at time k, v = number of words in dictionary
25 Environment Representation Collection of a set of discrete and disjoint locations at time k: Place appearance model: belief about the existence of scene elements (words) Detector model relates feature existence and feature detection observation existence 26
26 Graphical Model detector model word existence word observation

27 Correlations of Word Occurrence Visual words are not independent, instead they tend to co-occur 28
28 Capturing Correlations Learn a tree-structured Bayesian network to capture dependencies between words (Chow Liu algorithm) Word 28 Word
 z 741 z 28 z 119 z 611 z 3118 root")
29 Capturing Correlations Learn a tree-structured Bayesian network to capture dependencies between words (Chow Liu algorithm) z 741 z 28 z 119 z 611 z 3118 root parent of
30 Graphical Model detector model word existence word observation Chow Liu tree
31 Inference in FAB-MAP all observations up to k observation likelihood prior location i normalizing term
32 Observation Likelihood Chow Liu tree for the joint distribution 33
33 Observation Likelihood Chow Liu tree for the joint distribution 34
34 Observation Likelihood Chow Liu tree for the joint distribution can be further expanded and estimated from training data appearance model (updated online) 35
35 Location Prior Use a simple motion model to compute If the vehicle is at location i at time k-1, it is likely to be at one of the topologically adjacent locations at time t In case of unknown neighbors, part of the probability mass is assigned to a new place node (no odometry is used) 36
36 Normalization all observations up to k observation likelihood prior location i normalizing term We need to evaluate the normalizing term since the current observation might come from a location not yet contained in the map
37 mapped places unmapped places
38 mapped places unmapped places approximate by sampling: prior probability of being at a new location sampled place models
39 Updating Place Models Maximum likelihood data association after each observation Update the relevant place appearance model Each component is updated according to prior Bayes rule + two assumption: observations independent given place detection errors independent of location 40
40 Experimental Results 2k images, collected 30m apart, for training (vocabulary + Chow Liu tree) Vocabulary: 100k words 1000 km test data set: 103k images, ~8m apart, with 50k loop closures, 21h driving Robust matching even when place appearance changes Correct loop closures under perspective changes, rotation, lighting changes, dynamic objects,...


41 Perspective Change

42 Rotation

43 Lighting Change
44 Dynamic Objects


45 Perceptual Aliasing Correctly Rejected



46 Highest Confidence False Positives
 Trajectory from GPS")
47 Loop Closure (70 km Data Set) Trajectory from GPS data
48 Video 49
49 Timing Performance Mean computation times: Inference: 25 ms for 100k locations SURF detection + quantization: 483 ms
50 Visual Odometry 51
51 Visual Odometry with Loop Closure Constraints 52
52 Combined Result 53
53 Multi-Session Mapping 54
54 Multi-Session Mapping 55
55 Summary Appearance-only navigation Bag-of-words approach to recognize places Chow Liu tree to capture dependencies Probabilistic framework can deal with perceptual aliasing and new place detection Successfully detects loops in challenging outdoor environments Fast enough for online loop closure detection Can be used to complement metric SLAM 56
56 Further Reading M. Cummins & P. Newman FAB-MAP: Probabilistic Localization and Mapping in the Space of Appearance Int. Journal of Robotics Research, 2008 Appearance-only SLAM at Large Scale with FAB-MAP 2.0 Int. Journal of Robotics Research,
Pattern recognition (3)
") Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
Indexing local features and instance recognition May 15 th, 2018
 Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Distances and Kernels. Motivation
 Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Recognition with Bag-ofWords. (Borrowing heavily from Tutorial Slides by Li Fei-fei)
") Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Object Classification for Video Surveillance
 Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Indexing local features and instance recognition May 16 th, 2017
 Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 14 th, 2015
 Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Visual Navigation for Flying Robots. Structure From Motion
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Structure From Motion Dr. Jürgen Sturm VISNAV Oral Team Exam Date and Time Student Name Student Name Student Name Mon, July
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Structure From Motion Dr. Jürgen Sturm VISNAV Oral Team Exam Date and Time Student Name Student Name Student Name Mon, July
CS 4495 Computer Vision Classification 3: Bag of Words. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
Lecture 14: Indexing with local features. Thursday, Nov 1 Prof. Kristen Grauman. Outline
 Lecture 14: Indexing with local features Thursday, Nov 1 Prof. Kristen Grauman Outline Last time: local invariant features, scale invariant detection Applications, including stereo Indexing with invariant
Lecture 14: Indexing with local features Thursday, Nov 1 Prof. Kristen Grauman Outline Last time: local invariant features, scale invariant detection Applications, including stereo Indexing with invariant
Recognizing Object Instances. Prof. Xin Yang HUST
 Recognizing Object Instances Prof. Xin Yang HUST Applications Image Search 5 Years Old Techniques Applications For Toys Applications Traffic Sign Recognition Today: instance recognition Visual words quantization,
Recognizing Object Instances Prof. Xin Yang HUST Applications Image Search 5 Years Old Techniques Applications For Toys Applications Traffic Sign Recognition Today: instance recognition Visual words quantization,
Recognizing object instances
 Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Today. Main questions 10/30/2008. Bag of words models. Last time: Local invariant features. Harris corner detector: rotation invariant detection
 Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Recognizing object instances. Some pset 3 results! 4/5/2011. Monday, April 4 Prof. Kristen Grauman UT-Austin. Christopher Tosh.
 Recognizing object instances Some pset 3 results! Monday, April 4 Prof. UT-Austin Brian Bates Christopher Tosh Brian Nguyen Che-Chun Su 1 Ryu Yu James Edwards Kevin Harkness Lucy Liang Lu Xia Nona Sirakova
Recognizing object instances Some pset 3 results! Monday, April 4 Prof. UT-Austin Brian Bates Christopher Tosh Brian Nguyen Che-Chun Su 1 Ryu Yu James Edwards Kevin Harkness Lucy Liang Lu Xia Nona Sirakova
The bits the whirl-wind left out..
 The bits the whirl-wind left out.. Reading: Szeliski Background: 1 Edge Features Reading: Szeliski - 1.1 + 4.2.1 (Background: Ch 2 + 3.1 3.3) Background: 2 Edges as Gradients Edge detection = differential
The bits the whirl-wind left out.. Reading: Szeliski Background: 1 Edge Features Reading: Szeliski - 1.1 + 4.2.1 (Background: Ch 2 + 3.1 3.3) Background: 2 Edges as Gradients Edge detection = differential
Feature Matching + Indexing and Retrieval
 CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
Instance recognition
 Instance recognition Thurs Oct 29 Last time Depth from stereo: main idea is to triangulate from corresponding image points. Epipolar geometry defined by two cameras We ve assumed known extrinsic parameters
Instance recognition Thurs Oct 29 Last time Depth from stereo: main idea is to triangulate from corresponding image points. Epipolar geometry defined by two cameras We ve assumed known extrinsic parameters
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Image Features and Categorization. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Got your proposals! Thanks! Will reply with feedbacks this week. HW 4 Due 11:59pm on Wed,
Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Got your proposals! Thanks! Will reply with feedbacks this week. HW 4 Due 11:59pm on Wed,
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Image Features and Categorization. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Proposal due 11:59 PM on Thursday, Oct 27 Submit via CANVAS Send a copy to Jia-Bin and
Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Proposal due 11:59 PM on Thursday, Oct 27 Submit via CANVAS Send a copy to Jia-Bin and
Lecture 12 Visual recognition
 Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
Computer Vision. Exercise Session 10 Image Categorization
 Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization
 Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization Jung H. Oh, Gyuho Eoh, and Beom H. Lee Electrical and Computer Engineering, Seoul National University,
Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization Jung H. Oh, Gyuho Eoh, and Beom H. Lee Electrical and Computer Engineering, Seoul National University,
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Introduction to Mobile Robotics Multi-Robot Exploration
 Introduction to Mobile Robotics Multi-Robot Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras Exploration The approaches seen so far are purely passive. Given an unknown environment,
Introduction to Mobile Robotics Multi-Robot Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras Exploration The approaches seen so far are purely passive. Given an unknown environment,
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
FAB-MAP: Appearance-Based Place Recognition and Mapping using a Learned Visual Vocabulary Model
 Invited Applications Paper FAB-MAP: Appearance-Based Place Recognition and Mapping using a Learned Visual Vocabulary Model Mark Cummins Paul Newman University of Oxford, Parks Road, Oxford, OX1 3PJ, UK
Invited Applications Paper FAB-MAP: Appearance-Based Place Recognition and Mapping using a Learned Visual Vocabulary Model Mark Cummins Paul Newman University of Oxford, Parks Road, Oxford, OX1 3PJ, UK
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Topological Mapping. Discrete Bayes Filter
 Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Fast-SeqSLAM: Place Recognition and Multi-robot Map Merging. Sayem Mohammad Siam
 Fast-SeqSLAM: Place Recognition and Multi-robot Map Merging by Sayem Mohammad Siam A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department of Computing
Fast-SeqSLAM: Place Recognition and Multi-robot Map Merging by Sayem Mohammad Siam A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department of Computing
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Improving Vision-based Topological Localization by Combining Local and Global Image Features
 Improving Vision-based Topological Localization by Combining Local and Global Image Features Shuai Yang and Han Wang Nanyang Technological University, Singapore Introduction Self-localization is crucial
Improving Vision-based Topological Localization by Combining Local and Global Image Features Shuai Yang and Han Wang Nanyang Technological University, Singapore Introduction Self-localization is crucial
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Loop detection and extended target tracking using laser data
 Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Visual Recognition and Search April 18, 2008 Joo Hyun Kim
 Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
Introduction to SLAM Part II. Paul Robertson
 Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
Introduction to Object Recognition & Bag of Words (BoW) Models
 Models") : Introduction to Object Recognition & Bag of Words (BoW) Models Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction to object recognition Representation Learning Recognition
: Introduction to Object Recognition & Bag of Words (BoW) Models Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction to object recognition Representation Learning Recognition
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Introduction to Mobile Robotics Path Planning and Collision Avoidance
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS
 8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
Visual Pathways to the Brain
 Visual Pathways to the Brain 1 Left half of visual field which is imaged on the right half of each retina is transmitted to right half of brain. Vice versa for right half of visual field. From each eye
Visual Pathways to the Brain 1 Left half of visual field which is imaged on the right half of each retina is transmitted to right half of brain. Vice versa for right half of visual field. From each eye
 5*4%),-
5*4%),- Semantic Mapping and Reasoning Approach for Mobile Robotics
 Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Lecture 15: Object recognition: Bag of Words models & Part based generative models
 Lecture 15: Object recognition: Bag of Words models & Part based generative models Professor Fei Fei Li Stanford Vision Lab 1 Basic issues Representation How to represent an object category; which classification
Lecture 15: Object recognition: Bag of Words models & Part based generative models Professor Fei Fei Li Stanford Vision Lab 1 Basic issues Representation How to represent an object category; which classification
Introduction to Mobile Robotics Iterative Closest Point Algorithm. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras
 Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Experiments in Place Recognition using Gist Panoramas
 Experiments in Place Recognition using Gist Panoramas A. C. Murillo DIIS-I3A, University of Zaragoza, Spain. acm@unizar.es J. Kosecka Dept. of Computer Science, GMU, Fairfax, USA. kosecka@cs.gmu.edu Abstract
Experiments in Place Recognition using Gist Panoramas A. C. Murillo DIIS-I3A, University of Zaragoza, Spain. acm@unizar.es J. Kosecka Dept. of Computer Science, GMU, Fairfax, USA. kosecka@cs.gmu.edu Abstract
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
CS 231A Computer Vision (Fall 2011) Problem Set 4
 Problem Set 4") CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
Robust Place Recognition for 3D Range Data based on Point Features
 21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA Robust Place Recognition for 3D Range Data based on Point Features Bastian
21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA Robust Place Recognition for 3D Range Data based on Point Features Bastian
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Improving Recognition through Object Sub-categorization
 Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Robotics. Lecture 7: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Improving Vision-based Topological Localization by Combing Local and Global Image Features
 Improving Vision-based Topological Localization by Combing Local and Global Image Features Shuai Yang and Han Wang School of Electrical and Electronic Engineering Nanyang Technological University Singapore
Improving Vision-based Topological Localization by Combing Local and Global Image Features Shuai Yang and Han Wang School of Electrical and Electronic Engineering Nanyang Technological University Singapore
Det De e t cting abnormal event n s Jaechul Kim
 Detecting abnormal events Jaechul Kim Purpose Introduce general methodologies used in abnormality detection Deal with technical details of selected papers Abnormal events Easy to verify, but hard to describe
Detecting abnormal events Jaechul Kim Purpose Introduce general methodologies used in abnormality detection Deal with technical details of selected papers Abnormal events Easy to verify, but hard to describe
IN computer vision develop mathematical techniques in
 International Journal of Scientific & Engineering Research Volume 4, Issue3, March-2013 1 Object Tracking Based On Tracking-Learning-Detection Rupali S. Chavan, Mr. S.M.Patil Abstract -In this paper; we
International Journal of Scientific & Engineering Research Volume 4, Issue3, March-2013 1 Object Tracking Based On Tracking-Learning-Detection Rupali S. Chavan, Mr. S.M.Patil Abstract -In this paper; we
Recognition. Topics that we will try to cover:
 Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions
 Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions Akitsugu Noguchi and Keiji Yanai Department of Computer Science, The University of Electro-Communications, 1-5-1 Chofugaoka,
Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions Akitsugu Noguchi and Keiji Yanai Department of Computer Science, The University of Electro-Communications, 1-5-1 Chofugaoka,
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Descriptors for CV. Introduc)on:
on:") Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
Descriptors for CV Content 2014 1.Introduction 2.Histograms 3.HOG 4.LBP 5.Haar Wavelets 6.Video based descriptor 7.How to compare descriptors 8.BoW paradigm 1 2 1 2 Color RGB histogram Introduc)on: Image
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Object Recognition. Lecture 11, April 21 st, Lexing Xie. EE4830 Digital Image Processing
 Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
ORB SLAM 2 : an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras
 ORB SLAM 2 : an OpenSource SLAM System for Monocular, Stereo and RGBD Cameras Raul urartal and Juan D. Tardos Presented by: Xiaoyu Zhou Bolun Zhang Akshaya Purohit Lenord Melvix 1 Outline Background Introduction
ORB SLAM 2 : an OpenSource SLAM System for Monocular, Stereo and RGBD Cameras Raul urartal and Juan D. Tardos Presented by: Xiaoyu Zhou Bolun Zhang Akshaya Purohit Lenord Melvix 1 Outline Background Introduction
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Geometric VLAD for Large Scale Image Search. Zixuan Wang 1, Wei Di 2, Anurag Bhardwaj 2, Vignesh Jagadesh 2, Robinson Piramuthu 2
 Geometric VLAD for Large Scale Image Search Zixuan Wang 1, Wei Di 2, Anurag Bhardwaj 2, Vignesh Jagadesh 2, Robinson Piramuthu 2 1 2 Our Goal 1) Robust to various imaging conditions 2) Small memory footprint
Geometric VLAD for Large Scale Image Search Zixuan Wang 1, Wei Di 2, Anurag Bhardwaj 2, Vignesh Jagadesh 2, Robinson Piramuthu 2 1 2 Our Goal 1) Robust to various imaging conditions 2) Small memory footprint
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition. Isma Hadji G. N. DeSouza
 Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Robot Mapping. TORO Gradient Descent for SLAM. Cyrill Stachniss
 Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Object detection using non-redundant local Binary Patterns
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
Arbib: Slides for TMB2 Section 7.2 1
 Arbib: Slides for TMB2 Section 7.2 1 Lecture 20: Optic Flow Reading assignment: TMB2 7.2 If, as we walk forward, we recognize that a tree appears to be getting bigger, we can infer that the tree is in
Arbib: Slides for TMB2 Section 7.2 1 Lecture 20: Optic Flow Reading assignment: TMB2 7.2 If, as we walk forward, we recognize that a tree appears to be getting bigger, we can infer that the tree is in
Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization
 Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily