COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES
|
|
|
- Jack Thornton
- 5 years ago
- Views:
Transcription
1 COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28
2 Structure of presentation Reason Methods Test cases Analysis Conclusions why should we compare that we are going to compare scenarios of the tests 2 / 28
3 Rationale Emerging technologies Do you remember... when land measurements were tedious and photogrammetry was fast? when laser scanning made photogrammetry obsolete? when computer vision lead to SfM-MVS? 3 / 28
4 Rationale Bundler & CMVS-PMVS or SfM-MVS SIFT (Lowe, 1999) - Scale Invariant Feature Transform SURF (Bay et al., 2006) - Speeded Up Robust Feature SBA (Lourakis et al., 2009) - Sparse Bundle Adjustment Bundler (Snavely et al., 2006) CMVS & PMVS (Furukawa et al., 2009) [Clustered & Patched] Multi View Stereo 4 / 28
5 Rationale Bundler - CMVS & PMVS work flow Full automation up to scale Ability to manage 1000's of photos Use of uncalibrated cameras Easy & fast acquisition simple rules & convergent geometry Very dense, colour point cloud generation Fully automated capture of 's of points Minimization of blunders (noise) in point clouds Density & accuracy vary to distance common to all IBM BUT unknown accuracy (& precision) 5 / 28
6 Rationale Laser Scanning vs SfM-MVS Both are fast in acquisition & processing time Provide huge datasets of colour point clouds Advantages & disadvantages are apparent on both so why don't we perform a direct comparison, while adding the traditional photogrammetry in between from the engineer's point of view 6 / 28


7 Methods & hardware Terrestrial Laser Scanning 7 / 28
 adjustment OR use bar distance to scale object")
8 Methods & hardware Photogrammetry Zscan from MENCI Using triplets taken with parallel axis at known distances in between using a pre-calibrated bar (Triple stereo) Calibrated Nikon D90 with 24mm fixed focal May use control points and solve many triplets in a bundle (independent model) adjustment OR use bar distance to scale object 8 / 28
9 Methods & hardware Photogrammetry BAR BASE CAMERA-TO-OBJECT DISTANCE 9 / 28
10 Methods & hardware SfM-MVS Multiple un-calibrated hand held photos thought BundlerCMVS & PMVS work flow Measure control points in point cloud Perform a scaled similarity transformation for global registration If global registration not necessary, just scale model Black box - Difficult to amend or check process accuracy & precision 10 / 28

11 Test models / scenarios Artificial mathematical surface Simple facade Complex scene with a large 3D object 11 / 28

12 Sphere 0.4mm pixel size accuracy {0.8mm} Artificial surface as reference 300mm diameter styrofoam ball Texture applied Phototogrammetry & SfM-MVS tested only ZSCAN Distance 1.5 & 2.5m Base 10, 15, 20 & 25 cm SfM-MVS Five hand held photos autofocus 12 / 28

![5m with 10cm base [ZS] Same](/docs-images/94/118542445/images/13-3.jpg "triplet with SfM-MVS [PMVS3] Five")

![5m [PMVS5] ZSCAN models @ 1.](/docs-images/94/118542445/images/13-5.jpg "5m with 0.20, 0.30, 0.40, 0.")
13 Sphere What was compared ZSCAN triplet with parallel 1.5m with 10cm base [ZS] Same triplet with SfM-MVS [PMVS3] Five hand held photos, convergent geometry, autofocus [PMVS5] ZSCAN 1.5m with 0.20, 0.30, 0.40, 0.50 m bases, respectively 13 / 28
14 Sphere Precision assessment Comparison against the best-fit sphere, diameter being calculated from point cloud Scale from ZScan bar and manual measurements (7) Noise assessment ZS PMVS3 PMVS # of points Max Distance (mm) Mean Absolute Distance (mm) STD Distance (mm) Diameter (mm) 14 / 28
 Noise assessment ZS PMVS3 PMVS5 15 /")
15 Sphere Precision assessment Comparison against the best-fit sphere, diameter being calculated from point cloud Scale from ZScan bar and manual measurements (7) Noise assessment ZS PMVS3 PMVS5 15 / 28
16 Sphere Accuracy assessment Comparison against the 300mm diameter sphere Scale from ZScan bar and manual measurements (7) Overall assessment of accuracy Max distance (mm) Mean Absolute Difference (mm) Mean distance (mm) RMS (mm) Standard deviation (mm) Accuracy (%) (<2σ or <1.6mm) Completeness (%) on half sphere ZS PMVS PMVS / 28
 Overall assessment of accuracy ZS PMVS3 PMVS5 17")
17 Sphere Accuracy assessment Comparison against the 300mm diameter sphere Scale from ZScan bar and manual measurements (7) Overall assessment of accuracy ZS PMVS3 PMVS5 17 / 28

18 Facade Object description 13.0 x 5.5 m Narrow road: <5.0m object to photo distance Large homogeneous areas unfavourable to IBM Flat object difficult to recover focal length with self calibration TLS data from a single station, used as reference (~10.3 Mpoints), reduced to 4.3 Mpoints 18 / 28
 At ~5m distance")

19 Facade Photography ZSCAN 13 triplets for ZSCAN Hand held Typical photo (4288x2848 pix) At ~5m distance Ground pixel size 1.1 mm 39 vertical photos 36 oblique photos out of which 4 point clouds were created 19 / 28
![Facade Point clouds 13 triplets (39 photos) solved with ZSCAN using bundle adjustment [ZS] The aforementioned photos solved with SfM-MVS](/docs-images/94/118542445/images/20-2.jpg "[PMVStr] 39 hand held photos solved with SfM-MVS [PMVSvr] The afore mentioned 39 photos with additional 36 oblique photos (75 in total)")
20 Facade Point clouds 13 triplets (39 photos) solved with ZSCAN using bundle adjustment [ZS] The aforementioned photos solved with SfM-MVS [PMVStr] 39 hand held photos solved with SfM-MVS [PMVSvr] The afore mentioned 39 photos with additional 36 oblique photos (75 in total) [PMVSall] 20 / 28
21 Facade Comparison method PMVStr, PMVSvr & PMVSall models were scaled using 7 measured distances on the object All models were aligned with the TLS model using ICP Final analysis was done using commercial (point-tosurface) and in-house (point-to-point) software with similar results 21 / 28
22 Facade Analytic Comparison PMVSall PMVSvr PMVStr ZS Mean reprojection error [pix] STD focal length [pix] MAD (m) Mean (m) STD (m) # of points ZSCAN with 0.6m base is 3.41mm STDs of SfM-MVS is comparable to TLS data, if not better 22 / 28

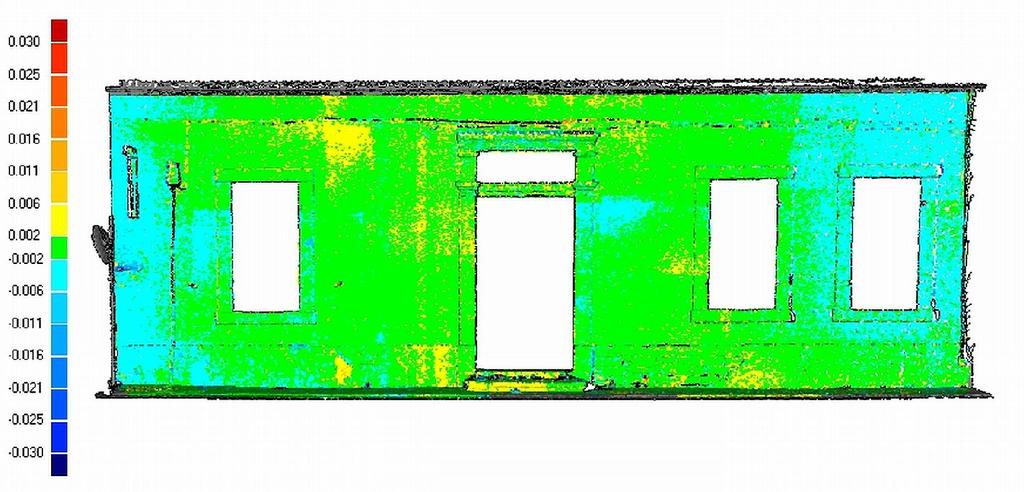
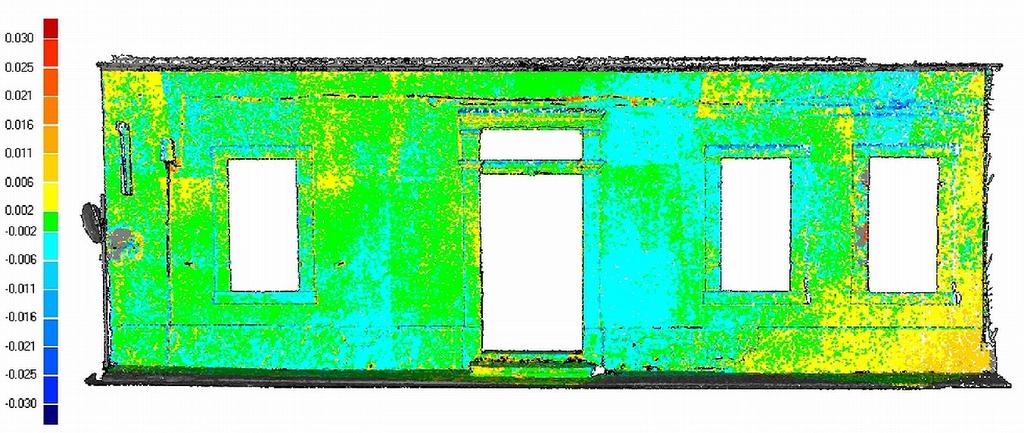
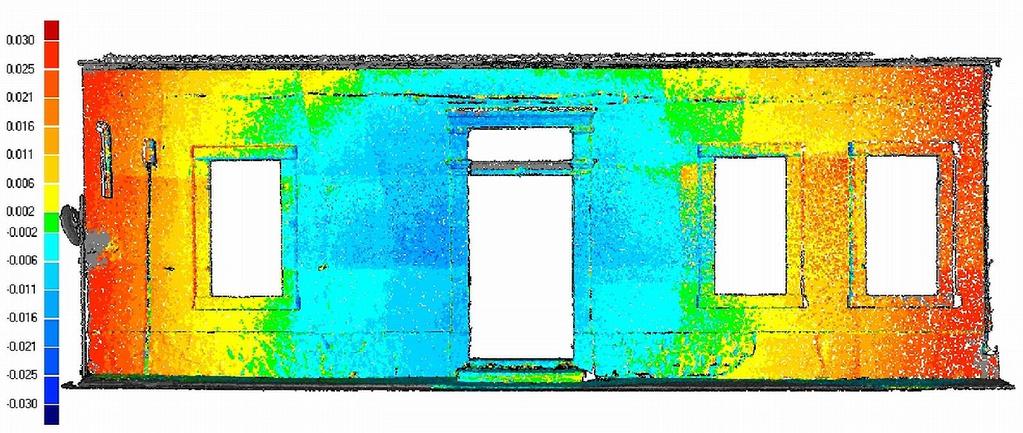
23 Facade Visual Comparison PMVSall PMVSvr ZS PMVStr 23 / 28

24 Complex Scene EAC's facilities after explosion Distance ~ 17-35m Height 26m Metal constructions, of high complexity TLS vs SfM-MVS, due to fast acquisition Variable illumination conditions at each side of the object - camera set to auto 24 / 28

25 Complex Scene Photography Selected positions & 3 sec auto acquisition while moving Auto focus ON, Sony a mm zoom lens 25 / 28


26 Complex Scene Qualitative assessment only 26 / 28
27 Conclusions & Discussion Accuracy of SfM-MVS methods is better to 'traditional' photogrammetry TLS & SfM-MVS accuracy comparable in facade TLS is better in complex scenes (simplicity, noise) Versatility of IBM allows accommodation of smaller objects with higher accuracy IBMs are still slower to final result, but cheaper IBMs have better colour/texture quality 27 / 28
28 so it depends on the application, people & hardware available while the combination is always an option Thank you for your attention 28 / 28
APPLICATIONS OF OPEN AND FREE SOFTWARE: FROM UNDERWATER TO THE SKY
 APPLICATIONS OF OPEN AND FREE SOFTWARE: FROM UNDERWATER TO THE SKY ISPRS Working Group V/2 Conference, Cultural heritage data acquisition and processing 17th 19th August 2011 - University of York, UK Why
APPLICATIONS OF OPEN AND FREE SOFTWARE: FROM UNDERWATER TO THE SKY ISPRS Working Group V/2 Conference, Cultural heritage data acquisition and processing 17th 19th August 2011 - University of York, UK Why
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
High Definition Modeling of Calw, Badstrasse and its Google Earth Integration
 Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Improving Initial Estimations for Structure from Motion Methods
 Improving Initial Estimations for Structure from Motion Methods University of Bonn Outline Motivation Computer-Vision Basics Stereo Vision Bundle Adjustment Feature Matching Global Initial Estimation Component
Improving Initial Estimations for Structure from Motion Methods University of Bonn Outline Motivation Computer-Vision Basics Stereo Vision Bundle Adjustment Feature Matching Global Initial Estimation Component
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING?
 3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING? F. Remondino 1 A. Guarnieri 2 A. Vettore 2 1 Institute of Geodesy and Photogrammetry ETH Hönggerberg - Zurich, Switzerland e-mail:
3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING? F. Remondino 1 A. Guarnieri 2 A. Vettore 2 1 Institute of Geodesy and Photogrammetry ETH Hönggerberg - Zurich, Switzerland e-mail:
Introduction to photogrammetry (with an underwater flavor)
") Introduction to photogrammetry (with an underwater flavor) NAS - UCY HFF Field school, Cyprus, 2016 Dimitrios Skarlatos, Assistant Professor, Cyprus University of Technology Photogrammetric vision Lab
Introduction to photogrammetry (with an underwater flavor) NAS - UCY HFF Field school, Cyprus, 2016 Dimitrios Skarlatos, Assistant Professor, Cyprus University of Technology Photogrammetric vision Lab
Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain
 Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain Michael Schwind, Michael J. Starek (Presenter) 18th Annual JALBTCX Airborne Coastal Mapping and Charting Technical Workshop,
Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain Michael Schwind, Michael J. Starek (Presenter) 18th Annual JALBTCX Airborne Coastal Mapping and Charting Technical Workshop,
Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds
 www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
DENSE 3D POINT CLOUD GENERATION FROM UAV IMAGES FROM IMAGE MATCHING AND GLOBAL OPTIMAZATION
 DENSE 3D POINT CLOUD GENERATION FROM UAV IMAGES FROM IMAGE MATCHING AND GLOBAL OPTIMAZATION S. Rhee a, T. Kim b * a 3DLabs Co. Ltd., 100 Inharo, Namgu, Incheon, Korea ahmkun@3dlabs.co.kr b Dept. of Geoinformatic
DENSE 3D POINT CLOUD GENERATION FROM UAV IMAGES FROM IMAGE MATCHING AND GLOBAL OPTIMAZATION S. Rhee a, T. Kim b * a 3DLabs Co. Ltd., 100 Inharo, Namgu, Incheon, Korea ahmkun@3dlabs.co.kr b Dept. of Geoinformatic
Photogrammetry for forest inventory.
 Photogrammetry for forest inventory. Marc Pierrot Deseilligny. IGN/ENSG, France. Jonathan Lisein. Ulg Gembloux Agro-Bio Tech, Belgium. 1- Photogrammetry 2- Application to forestry 3- Tools and proposed
Photogrammetry for forest inventory. Marc Pierrot Deseilligny. IGN/ENSG, France. Jonathan Lisein. Ulg Gembloux Agro-Bio Tech, Belgium. 1- Photogrammetry 2- Application to forestry 3- Tools and proposed
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects
 Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley Systems White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud Keriven
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley Systems White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud Keriven
Telecommunications Engineering Thesis
 Telecommunications Engineering Thesis Validating a Structure from Motion Tool for use on Videos recorded from an Unmanned Aerial Vehicle (UAV) David Núñez Clemente david.nunez.clemente@gmail.com Universidad
Telecommunications Engineering Thesis Validating a Structure from Motion Tool for use on Videos recorded from an Unmanned Aerial Vehicle (UAV) David Núñez Clemente david.nunez.clemente@gmail.com Universidad
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
THE ISPRS/EUROSDR BENCHMARK ON MULTI-PLATFORM PHOTOGRAMMETRY: RESULTS AND LESSON LEARNT FRANCESCO NEX AND MARKUS GERKE
 THE ISPRS/EUROSDR BENCHMARK ON MULTI-PLATFORM PHOTOGRAMMETRY: RESULTS AND LESSON LEARNT FRANCESCO NEX AND MARKUS GERKE Overview Summary of the results Statistics Data release What s next? ISPRS / EuroSDR
THE ISPRS/EUROSDR BENCHMARK ON MULTI-PLATFORM PHOTOGRAMMETRY: RESULTS AND LESSON LEARNT FRANCESCO NEX AND MARKUS GERKE Overview Summary of the results Statistics Data release What s next? ISPRS / EuroSDR
Robust extraction of image correspondences exploiting the image scene geometry and approximate camera orientation
 Robust extraction of image correspondences exploiting the image scene geometry and approximate camera orientation Bashar Alsadik a,c, Fabio Remondino b, Fabio Menna b, Markus Gerke a, George Vosselman
Robust extraction of image correspondences exploiting the image scene geometry and approximate camera orientation Bashar Alsadik a,c, Fabio Remondino b, Fabio Menna b, Markus Gerke a, George Vosselman
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
The raycloud A Vision Beyond the Point Cloud
 The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
Cultural Heritage. Geometric Recording of Cultural Monuments. Basic Principles of Geometric Recording. Specific requirements
 LOW COST DIGITAL PHOTOGRAMMETRIC TECHNIQUES FOR THE DOCUMENTATION OF CULTURAL HERITAGE Ch. Ioannidis, S. Soile, C. Potsiou Lab. of Photogrammetry School of Rural & Surveying Eng. National Technical University
LOW COST DIGITAL PHOTOGRAMMETRIC TECHNIQUES FOR THE DOCUMENTATION OF CULTURAL HERITAGE Ch. Ioannidis, S. Soile, C. Potsiou Lab. of Photogrammetry School of Rural & Surveying Eng. National Technical University
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/91/106305353.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects
 www.bentley.com Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud
www.bentley.com Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud
Lecture 8.2 Structure from Motion. Thomas Opsahl
 Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Data Acquisition, Leica Scan Station 2, Park Avenue and 70 th Street, NY
 Automated registration of 3D-range with 2D-color images: an overview 44 th Annual Conference on Information Sciences and Systems Invited Session: 3D Data Acquisition and Analysis March 19 th 2010 Ioannis
Automated registration of 3D-range with 2D-color images: an overview 44 th Annual Conference on Information Sciences and Systems Invited Session: 3D Data Acquisition and Analysis March 19 th 2010 Ioannis
Textured Mesh Surface Reconstruction of Large Buildings with Multi-View Stereo
 The Visual Computer manuscript No. (will be inserted by the editor) Textured Mesh Surface Reconstruction of Large Buildings with Multi-View Stereo Chen Zhu Wee Kheng Leow Received: date / Accepted: date
The Visual Computer manuscript No. (will be inserted by the editor) Textured Mesh Surface Reconstruction of Large Buildings with Multi-View Stereo Chen Zhu Wee Kheng Leow Received: date / Accepted: date
Multiview Photogrammetry 3D Virtual Geology for everyone
 Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
3D recording of archaeological excavation
 5 th International Conference Remote Sensing in Archaeology The Age of Sensing 13-15 October 2014 - Duke University 3D recording of archaeological excavation Stefano Campana UNIVERSITY of CAMBRIDGE Faculty
5 th International Conference Remote Sensing in Archaeology The Age of Sensing 13-15 October 2014 - Duke University 3D recording of archaeological excavation Stefano Campana UNIVERSITY of CAMBRIDGE Faculty
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
3D from Images - Assisted Modeling, Photogrammetry. Marco Callieri ISTI-CNR, Pisa, Italy
 3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
Automatic image-based reconstruction of historical buildings from Ayutthaya
 การประช มว ชาการว ศวกรรมโยธาแห งชาต คร งท 20 The 20 tth National Convention on Civil Engineering ว นท 8-10 กรกฎาคม 2558 จ. ชลบ ร 8-10 July 2015, Chonburi, THAILAND Automatic image-based reconstruction
การประช มว ชาการว ศวกรรมโยธาแห งชาต คร งท 20 The 20 tth National Convention on Civil Engineering ว นท 8-10 กรกฎาคม 2558 จ. ชลบ ร 8-10 July 2015, Chonburi, THAILAND Automatic image-based reconstruction
STATUS OF AIRBORNE OBLIQUE IMAGING EUROSDR COMMISSION I PROJECT OBLIQUE IMAGERY. Markus Gerke May 15, 2014
 STATUS OF AIRBORNE OBLIQUE IMAGING EUROSDR COMMISSION I PROJECT OBLIQUE IMAGERY Markus Gerke May 15, 2014 THE FIRST AIRBORNE PHOTOS WERE OBLIQUE First recorded aerial photograph in the US (Boston), by
STATUS OF AIRBORNE OBLIQUE IMAGING EUROSDR COMMISSION I PROJECT OBLIQUE IMAGERY Markus Gerke May 15, 2014 THE FIRST AIRBORNE PHOTOS WERE OBLIQUE First recorded aerial photograph in the US (Boston), by
AIT Inline Computational Imaging: Geometric calibration and image rectification
 AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
EVOLUTION OF POINT CLOUD
 Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
NETWORK DESIGN IN CLOSE-RANGE PHOTOGRAMMETRY WITH SHORT BASELINE IMAGES
 NETWORK DESIGN IN CLOSE-RANGE PHOTOGRAMMETRY WITH SHORT BASELINE IMAGES L. Barazzetti Dept. of Architecture, Built environment and Construction engineering (ABC) Politecnico di Milano, Piazza Leonardo
NETWORK DESIGN IN CLOSE-RANGE PHOTOGRAMMETRY WITH SHORT BASELINE IMAGES L. Barazzetti Dept. of Architecture, Built environment and Construction engineering (ABC) Politecnico di Milano, Piazza Leonardo
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
Chapters 1 9: Overview
 Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS
 AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS Ioannis Stamos Department of Computer Science Hunter College, City University of New York 695 Park Avenue, New York NY 10065 istamos@hunter.cuny.edu http://www.cs.hunter.cuny.edu/
AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS Ioannis Stamos Department of Computer Science Hunter College, City University of New York 695 Park Avenue, New York NY 10065 istamos@hunter.cuny.edu http://www.cs.hunter.cuny.edu/
ACCURACY OF EXTERIOR ORIENTATION FOR A RANGE CAMERA
 ACCURACY OF EXTERIOR ORIENTATION FOR A RANGE CAMERA Jan Boehm, Timothy Pattinson Institute for Photogrammetry, University of Stuttgart, Germany jan.boehm@ifp.uni-stuttgart.de Commission V, WG V/2, V/4,
ACCURACY OF EXTERIOR ORIENTATION FOR A RANGE CAMERA Jan Boehm, Timothy Pattinson Institute for Photogrammetry, University of Stuttgart, Germany jan.boehm@ifp.uni-stuttgart.de Commission V, WG V/2, V/4,
Quality Report Generated with Pro version
 Quality Report Generated with Pro version 2.2.22 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the sections Click here for
Quality Report Generated with Pro version 2.2.22 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the sections Click here for
TERRESTRIAL LASER SCANNER DATA PROCESSING
 TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
EVALUATION OF WORLDVIEW-1 STEREO SCENES AND RELATED 3D PRODUCTS
 EVALUATION OF WORLDVIEW-1 STEREO SCENES AND RELATED 3D PRODUCTS Daniela POLI, Kirsten WOLFF, Armin GRUEN Swiss Federal Institute of Technology Institute of Geodesy and Photogrammetry Wolfgang-Pauli-Strasse
EVALUATION OF WORLDVIEW-1 STEREO SCENES AND RELATED 3D PRODUCTS Daniela POLI, Kirsten WOLFF, Armin GRUEN Swiss Federal Institute of Technology Institute of Geodesy and Photogrammetry Wolfgang-Pauli-Strasse
3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES
 3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES Georgeta Pop (Manea), Alexander Bucksch, Ben Gorte Delft Technical University, Department of Earth Observation and Space Systems,
3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES Georgeta Pop (Manea), Alexander Bucksch, Ben Gorte Delft Technical University, Department of Earth Observation and Space Systems,
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Quality Report Generated with Pix4Dmapper Pro version
 Quality Report Generated with Pix4Dmapper Pro version 3.1.23 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the sections Click
Quality Report Generated with Pix4Dmapper Pro version 3.1.23 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the sections Click
Manhattan-world Stereo and Surface Reconstruction
 Manhattan-world Stereo and Surface Reconstruction Kuan-Ting Yu CSAIL MIT Cambridge, USA peterkty@csail.mit.edu Abstract Depth estimation from 2D images has been extensively studied in the computer vision
Manhattan-world Stereo and Surface Reconstruction Kuan-Ting Yu CSAIL MIT Cambridge, USA peterkty@csail.mit.edu Abstract Depth estimation from 2D images has been extensively studied in the computer vision
Multiray Photogrammetry and Dense Image. Photogrammetric Week Matching. Dense Image Matching - Application of SGM
 Norbert Haala Institut für Photogrammetrie Multiray Photogrammetry and Dense Image Photogrammetric Week 2011 Matching Dense Image Matching - Application of SGM p q d Base image Match image Parallax image
Norbert Haala Institut für Photogrammetrie Multiray Photogrammetry and Dense Image Photogrammetric Week 2011 Matching Dense Image Matching - Application of SGM p q d Base image Match image Parallax image
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
Quality Report Generated with Pix4Dmapper Pro version
 Quality Report Generated with Pix4Dmapper Pro version 3.2.23 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the sections Click
Quality Report Generated with Pix4Dmapper Pro version 3.2.23 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the sections Click
Automatic image network design leading to optimal image-based 3D models
 Automatic image network design leading to optimal image-based 3D models Enabling laymen to capture high quality 3D models of Cultural Heritage Bashar Alsadik & Markus Gerke, ITC, University of Twente,
Automatic image network design leading to optimal image-based 3D models Enabling laymen to capture high quality 3D models of Cultural Heritage Bashar Alsadik & Markus Gerke, ITC, University of Twente,
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Single Spin Image-ICP matching for Efficient 3D Object Recognition
 Single Spin Image-ICP matching for Efficient 3D Object Recognition Ernst Bovenkamp ernst.bovenkamp@tno.nl Arvid Halma arvid.halma@tno.nl Pieter Eendebak pieter.eendebak@tno.nl Frank ter Haar frank.terhaar@tno.nl
Single Spin Image-ICP matching for Efficient 3D Object Recognition Ernst Bovenkamp ernst.bovenkamp@tno.nl Arvid Halma arvid.halma@tno.nl Pieter Eendebak pieter.eendebak@tno.nl Frank ter Haar frank.terhaar@tno.nl
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
3D reconstruction how accurate can it be?
 Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
INTEGRATION OF MOBILE LASER SCANNING DATA WITH UAV IMAGERY FOR VERY HIGH RESOLUTION 3D CITY MODELING
 INTEGRATION OF MOBILE LASER SCANNING DATA WITH UAV IMAGERY FOR VERY HIGH RESOLUTION 3D CITY MODELING Xianfeng Huang 1,2 Armin Gruen 1, Rongjun Qin 1 Tangwu Du 1, Wei Fang 1 1 Singapore-ETH Center, Future
INTEGRATION OF MOBILE LASER SCANNING DATA WITH UAV IMAGERY FOR VERY HIGH RESOLUTION 3D CITY MODELING Xianfeng Huang 1,2 Armin Gruen 1, Rongjun Qin 1 Tangwu Du 1, Wei Fang 1 1 Singapore-ETH Center, Future
Quality Report Generated with version
 Quality Report Generated with version 3.3.67 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the feature Click here for additional
Quality Report Generated with version 3.3.67 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the feature Click here for additional
Computer Vision and Remote Sensing. Lessons Learned
 Computer Vision and Remote Sensing Lessons Learned 1 Department of Photogrammetry Institute for Geodesy and Geoinformation Universtity Bonn Outline Photogrammetry and its relatives Remote Sensing: the
Computer Vision and Remote Sensing Lessons Learned 1 Department of Photogrammetry Institute for Geodesy and Geoinformation Universtity Bonn Outline Photogrammetry and its relatives Remote Sensing: the
PART A Three-Dimensional Measurement with iwitness
 PART A Three-Dimensional Measurement with iwitness A1. The Basic Process The iwitness software system enables a user to convert two-dimensional (2D) coordinate (x,y) information of feature points on an
PART A Three-Dimensional Measurement with iwitness A1. The Basic Process The iwitness software system enables a user to convert two-dimensional (2D) coordinate (x,y) information of feature points on an
Identification Of the Main 3D Scanning Techniques Suitable for Use in Cultural Heritage Objects
 Identification Of the Main 3D Scanning Techniques Suitable for Use in Cultural Heritage Objects Tobias Reich i3mainz, Institute for Spatial Information and Surveying Technology University of Applied Sciences
Identification Of the Main 3D Scanning Techniques Suitable for Use in Cultural Heritage Objects Tobias Reich i3mainz, Institute for Spatial Information and Surveying Technology University of Applied Sciences
A System of Image Matching and 3D Reconstruction
 A System of Image Matching and 3D Reconstruction CS231A Project Report 1. Introduction Xianfeng Rui Given thousands of unordered images of photos with a variety of scenes in your gallery, you will find
A System of Image Matching and 3D Reconstruction CS231A Project Report 1. Introduction Xianfeng Rui Given thousands of unordered images of photos with a variety of scenes in your gallery, you will find
3D Reconstruction from FMV for terrain awareness
 3D Reconstruction from FMV for terrain awareness Fidel Gutiérrez Resendiz AVNTK S.C. Av. Chapalita 1143, Col. Chapalita, C.P. 45040 Guadalajara, Jalisco, México. fidel@avntk.com Copyright 2010 AVNTK S.C.
3D Reconstruction from FMV for terrain awareness Fidel Gutiérrez Resendiz AVNTK S.C. Av. Chapalita 1143, Col. Chapalita, C.P. 45040 Guadalajara, Jalisco, México. fidel@avntk.com Copyright 2010 AVNTK S.C.
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
A voxel-based approach for imaging voids in three-dimensional point clouds
 A voxel-based approach for imaging voids in three-dimensional point clouds Katie N. Salvaggio, Carl Salvaggio, and Shea Hagstrom ochester Institute of Technology, 54 Lomb Memorial Drive, ochester, NY,
A voxel-based approach for imaging voids in three-dimensional point clouds Katie N. Salvaggio, Carl Salvaggio, and Shea Hagstrom ochester Institute of Technology, 54 Lomb Memorial Drive, ochester, NY,
Oblique aerial imagery in the praxis: applications and challenges
 ISPRS / EuroSDR Workshop on Oblique aerial cameras sensors and data processing Barcelona, 10 October 2017 Oblique aerial imagery in the praxis: applications and challenges Daniela Poli, Kjersti Moe, Klaus
ISPRS / EuroSDR Workshop on Oblique aerial cameras sensors and data processing Barcelona, 10 October 2017 Oblique aerial imagery in the praxis: applications and challenges Daniela Poli, Kjersti Moe, Klaus
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Geometry of Aerial photogrammetry. Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization)
") Geometry of Aerial photogrammetry Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization) Image formation - Recap The geometry of imaging system
Geometry of Aerial photogrammetry Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization) Image formation - Recap The geometry of imaging system
Multi-view reconstruction for projector camera systems based on bundle adjustment
 Multi-view reconstruction for projector camera systems based on bundle adjustment Ryo Furuakwa, Faculty of Information Sciences, Hiroshima City Univ., Japan, ryo-f@hiroshima-cu.ac.jp Kenji Inose, Hiroshi
Multi-view reconstruction for projector camera systems based on bundle adjustment Ryo Furuakwa, Faculty of Information Sciences, Hiroshima City Univ., Japan, ryo-f@hiroshima-cu.ac.jp Kenji Inose, Hiroshi
Computer Vision. Introduction
 Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Grafica 3D per i beni culturali: Multiview stereo matching, the tools Maggio 2018
 Grafica 3D per i beni culturali: Multiview stereo matching, the tools 10-15 Maggio 2018 0 Image-based 3D Reconstruction Advantages: Automatic Fast (relatively to manual built) Good scalability (both small
Grafica 3D per i beni culturali: Multiview stereo matching, the tools 10-15 Maggio 2018 0 Image-based 3D Reconstruction Advantages: Automatic Fast (relatively to manual built) Good scalability (both small
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
Photogrammetry: A Modern Tool for Crash Scene Mapping
 Photogrammetry: A Modern Tool for Crash Scene Mapping Background A police accident investigator (AI) has many tasks when arriving at a crash scene. The officer s highest priority is public safety; the
Photogrammetry: A Modern Tool for Crash Scene Mapping Background A police accident investigator (AI) has many tasks when arriving at a crash scene. The officer s highest priority is public safety; the
Quality Report Generated with version
 Quality Report Generated with version 1.3.54 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the feature Click here for additional
Quality Report Generated with version 1.3.54 Important: Click on the different icons for: Help to analyze the results in the Quality Report Additional information about the feature Click here for additional
Processed :36:54 Average Ground Sampling Distance (GSD) Time for Initial Processing (without report)
 Time for Initial Processing (without report)") Important: Click on the different icons for: Dronedata Back Office Server Generated Quality Report Phase 1 Time 07h:33m:02s Phase 2 Time 02h:58m:08s Phase 3 Time Not Applicable Total Time All Phases 10h:31m:08s
Important: Click on the different icons for: Dronedata Back Office Server Generated Quality Report Phase 1 Time 07h:33m:02s Phase 2 Time 02h:58m:08s Phase 3 Time Not Applicable Total Time All Phases 10h:31m:08s
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements
 Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
THREE-DIMENSIONAL MAPPING OF AN ANCIENT CAVE PAINTINGS USING CLOSE-RANGE PHOTOGRAMMETRY AND TERRESTRIAL LASER SCANNING TECHNOLOGIES
 THREE-DIMENSIONAL MAPPING OF AN ANCIENT CAVE PAINTINGS USING CLOSE-RANGE PHOTOGRAMMETRY AND TERRESTRIAL LASER SCANNING TECHNOLOGIES Z. Majid a, M. F. M. Ariff a, K. M. Idris a, A. R. Yusoff a, K.M. Idris
THREE-DIMENSIONAL MAPPING OF AN ANCIENT CAVE PAINTINGS USING CLOSE-RANGE PHOTOGRAMMETRY AND TERRESTRIAL LASER SCANNING TECHNOLOGIES Z. Majid a, M. F. M. Ariff a, K. M. Idris a, A. R. Yusoff a, K.M. Idris
Fusion of laser scanning and Photogrammetric data for the documentation and VR visualization of an archaeological tomb complex
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Fusion of laser scanning and Photogrammetric data for the documentation and VR visualization of an archaeological tomb complex E.
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Fusion of laser scanning and Photogrammetric data for the documentation and VR visualization of an archaeological tomb complex E.
Video Georegistration: Key Challenges. Steve Blask Harris Corporation GCSD Melbourne, FL 32934
 Video Georegistration: Key Challenges Steve Blask sblask@harris.com Harris Corporation GCSD Melbourne, FL 32934 Definitions Registration: image to image alignment Find pixel-to-pixel correspondences between
Video Georegistration: Key Challenges Steve Blask sblask@harris.com Harris Corporation GCSD Melbourne, FL 32934 Definitions Registration: image to image alignment Find pixel-to-pixel correspondences between
28 out of 28 images calibrated (100%), all images enabled. 0.02% relative difference between initial and optimized internal camera parameters
, all images enabled. 0.02% relative difference between initial and optimized internal camera parameters") Dronedata Render Server Generated Quality Report Phase 1 Time 00h:01m:56s Phase 2 Time 00h:04m:35s Phase 3 Time 00h:13m:45s Total Time All Phases 00h:20m:16s Generated with Pix4Dmapper Pro - TRIAL version
Dronedata Render Server Generated Quality Report Phase 1 Time 00h:01m:56s Phase 2 Time 00h:04m:35s Phase 3 Time 00h:13m:45s Total Time All Phases 00h:20m:16s Generated with Pix4Dmapper Pro - TRIAL version
Unwrapping of Urban Surface Models
 Unwrapping of Urban Surface Models Generation of virtual city models using laser altimetry and 2D GIS Abstract In this paper we present an approach for the geometric reconstruction of urban areas. It is
Unwrapping of Urban Surface Models Generation of virtual city models using laser altimetry and 2D GIS Abstract In this paper we present an approach for the geometric reconstruction of urban areas. It is
Centre for Digital Image Measurement and Analysis, School of Engineering, City University, Northampton Square, London, ECIV OHB
 HIGH ACCURACY 3-D MEASUREMENT USING MULTIPLE CAMERA VIEWS T.A. Clarke, T.J. Ellis, & S. Robson. High accuracy measurement of industrially produced objects is becoming increasingly important. The techniques
HIGH ACCURACY 3-D MEASUREMENT USING MULTIPLE CAMERA VIEWS T.A. Clarke, T.J. Ellis, & S. Robson. High accuracy measurement of industrially produced objects is becoming increasingly important. The techniques
GRAPHICS TOOLS FOR THE GENERATION OF LARGE SCALE URBAN SCENES
 GRAPHICS TOOLS FOR THE GENERATION OF LARGE SCALE URBAN SCENES Norbert Haala, Martin Kada, Susanne Becker, Jan Böhm, Yahya Alshawabkeh University of Stuttgart, Institute for Photogrammetry, Germany Forename.Lastname@ifp.uni-stuttgart.de
GRAPHICS TOOLS FOR THE GENERATION OF LARGE SCALE URBAN SCENES Norbert Haala, Martin Kada, Susanne Becker, Jan Böhm, Yahya Alshawabkeh University of Stuttgart, Institute for Photogrammetry, Germany Forename.Lastname@ifp.uni-stuttgart.de
International Journal for Research in Applied Science & Engineering Technology (IJRASET) A Review: 3D Image Reconstruction From Multiple Images
 A Review: 3D Image Reconstruction From Multiple Images") A Review: 3D Image Reconstruction From Multiple Images Rahul Dangwal 1, Dr. Sukhwinder Singh 2 1 (ME Student) Department of E.C.E PEC University of TechnologyChandigarh, India-160012 2 (Supervisor)Department
A Review: 3D Image Reconstruction From Multiple Images Rahul Dangwal 1, Dr. Sukhwinder Singh 2 1 (ME Student) Department of E.C.E PEC University of TechnologyChandigarh, India-160012 2 (Supervisor)Department
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
1. Introduction. A CASE STUDY Dense Image Matching Using Oblique Imagery Towards All-in- One Photogrammetry
 Submitted to GIM International FEATURE A CASE STUDY Dense Image Matching Using Oblique Imagery Towards All-in- One Photogrammetry Dieter Fritsch 1, Jens Kremer 2, Albrecht Grimm 2, Mathias Rothermel 1
Submitted to GIM International FEATURE A CASE STUDY Dense Image Matching Using Oblique Imagery Towards All-in- One Photogrammetry Dieter Fritsch 1, Jens Kremer 2, Albrecht Grimm 2, Mathias Rothermel 1
Overview of the Trimble TX5 Laser Scanner
 Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Photo Tourism: Exploring Photo Collections in 3D
 Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy