Category-level Localization
|
|
|
- Tyrone Cummings
- 5 years ago
- Views:
Transcription

1 Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb, Rob Fergus, Kristen Grauman, Bastian Leibe, Ivan Laptev, Fei-Fei Li, Marcin Marszalek, Pietro Perona, Deva Ramanan, Bernt Schiele, Jamie Shotton, Josef Sivic and Andrea Vedaldi











2 What we would like to be able to do Visual scene understanding What is in the image and where Gate Plant Dog 2: Sitting on Motorbike Dog 1: Terrier Ground: Gravel Wall Person: John Smith, holding Dog 2 Motorbike: Suzuki GSX 750 Object categories, identities, properties, activities, relations,

?")
3 Recognition Tasks Image Classification Does the image contain an aeroplane? Object Class Detection/Localization Where are the aeroplanes (if any)? Object Class Segmentation Which pixels are part of an aeroplane (if any)?
:")


:")




4 Things vs. Stuff Thing (n): An object with a specific size and shape. Ted Adelson, Forsyth et al Stuff (n): Material defined by a homogeneous or repetitive pattern of fine-scale properties, but has no specific or distinctive spatial extent or shape. Slide: Geremy Heitz




5 Recognition Task Object Class Detection/Localization Where are the aeroplanes (if any)? Challenges Imaging factors e.g. lighting, pose, occlusion, clutter Intra-class variation Compared to Classification Detailed prediction e.g. bounding box Location usually provided for training

6 Challenges: Background Clutter

7 Challenges: Occlusion and truncation

8 Challenges: Intra-class variation
9 Object Category Recognition by Learning Difficult to define model of a category. Instead, learn from example images

10 Level of Supervision for Learning Image-level label Bounding box Pixel-level segmentation Parts







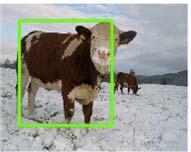






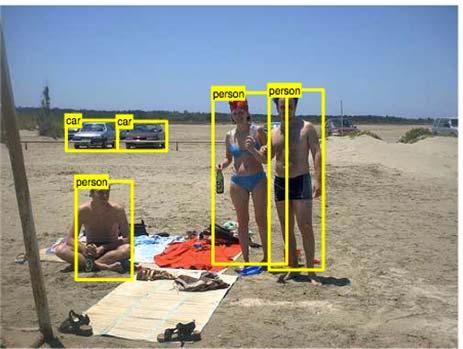
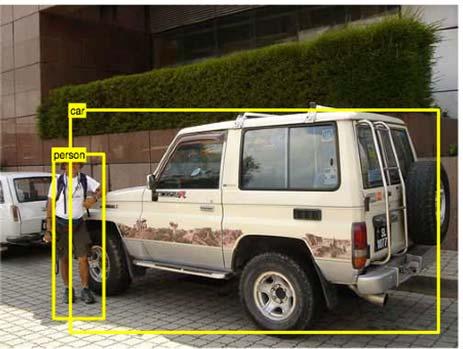
11 Preview of typical results aeroplane bicycle car cow horse motorbike
12 Class of model: Pictorial Structure Intuitive model of an object Model has two components 1. parts (2D image fragments) 2. structure (configuration of parts) Dates back to Fischler & Elschlager 1973 Is this complexity of representation necessary? Which features?
13 Restrict spatial deformations
14 Problem of background clutter Use a sub-window At correct position, no clutter is present Slide window to detect object Change size of window to search over scale
15 Outline 1. Sliding window detectors 2. Features and adding spatial information 3. Histogram of Oriented Gradients (HOG) 4. Two state of the art algorithms and PASCAL VOC 5. The future and challenges
16 Outline 1. Sliding window detectors Start: feature/classifier agnostic Method Problems/limitations 2. Features and adding spatial information 3. Histogram of Oriented Gradients (HOG) 4. Two state of the art algorithms and PASCAL VOC 5. The future and challenges


17 Detection by Classification Basic component: binary classifier Car/non-car Classifier Yes, No, not a a car car
18 Detection by Classification Detect objects in clutter by search Car/non-car Classifier Sliding window: exhaustive search over position and scale

19 Detection by Classification Detect objects in clutter by search Car/non-car Classifier Sliding window: exhaustive search over position and scale

20 Detection by Classification Detect objects in clutter by search Car/non-car Classifier Sliding window: exhaustive search over position and scale (can use same size window over a spatial pyramid of images)




21 Window (Image) Classification Training Data Feature Extraction Classifier Features usually engineered Classifier learnt from data Car/Non-car



22 Problems with sliding windows aspect ratio granuality (finite grid) partial occlusion multiple responses See work by Christoph Lampert et al CVPR 08, ECCV 08
23 Outline 1. Sliding window detectors 2. Features and adding spatial information Bag of visual word (BoW) models Beyond BoW I: Constellation and ISM models Beyond BoW II: Grids and spatial pyramids 3. Histogram of Oriented Gradients (HOG) 4. Two state of the art algorithms and PASCAL VOC 5. The future and challenges


24 Recap: Bag of (visual) Words representation Detect affine invariant local features (e.g. affine-harris) Represent by high-dimensional descriptors, e.g. 128-D for SIFT Map descriptors onto a common vocabulary of visual words Represent sliding window as a histogram over visual words a bag of words Summarizes sliding window content in a fixed-length vector suitable for classification



25 Examples for visual words Airplanes Motorbikes Faces Wild Cats Leaves People Bikes






26 Intuition Visual Vocabulary Visual words represent iconic image fragments Feature detectors and SIFT give invariance to local rotation and scale Discarding spatial information gives configuration invariance




27 Learning from positive ROI examples Bag of Words Feature Vector

28 Sliding window detector Classifier: SVM with linear kernel BOW representation for ROI Example detections for dog Lampert et al CVPR 08: Efficient branch and bound search over all windows




29 Discussion: ROI as a Bag of Visual Words Advantages No explicit modelling of spatial information high level of invariance to position and orientation in image Fixed length vector standard machine learning methods applicable Disadvantages No explicit modelling of spatial information less discriminative power Inferior to state of the art performance
30 Beyond BOW I: Pictorial Structure Intuitive model of an object Model has two components 1. parts (2D image fragments) 2. structure (configuration of parts) Dates back to Fischler & Elschlager 1973 Two approaches that have investigated this spring like model: Constellation model Implicit shape model (ISM)
31 Spatial Models Considered Fully connected shape model Star shape model x 1 x 1 x 6 x 2 x 6 x 2 x 5 x 3 x 5 x 3 x 4 x 4 e.g. Constellation Model Parts fully connected Recognition complexity: O(N P ) Method: Exhaustive search e.g. ISM Parts mutually independent Recognition complexity: O(NP) Method: Gen. Hough Transform P parts, N positions Slide credit: Rob Fergus







32 Constellation model Fergus, Perona & Zisserman,CVPR 03 Explicit structure model Joint Gaussian over all part positions Part detector determines position and scale Simultaneous learning of parts and structure Learn from images alone using EM algorithm x 6 x 5 x 1 x 4 x 2 x 3 Given detections: learn a six part model by optimizing part and configuration similarity


33 Example Learnt Motorbike Model Samples from appearance model




34 position of object determined Recognized Motorbikes




35 Airplanes
36 Discussion: Constellation Model Advantages Works well for many different object categories Can adapt well to categories where Shape is more important Appearance is more important Everything is learned from training data Weakly-supervised training possible Disadvantages Model contains many parameters that need to be estimated Cost increases exponentially with increasing number of parameters Fully connected model restricted to small number of parts. x 6 x 1 x 2 Recognition complexity: O(N P ) x 5 x 3 P parts, N positions x 4
37 Implicit Shape Model (ISM) Basic ideas Learn an appearance codebook Learn a star-topology structural model Features are considered independent given object centre Leibe, Leonardis, Schiele, 03/04 x 1 x 6 x 2 x 5 x 3 x 4 Algorithm: probabilistic Generalized Hough Transform










38 Codebook Representation Extraction of local object features Interest Points (e.g. Harris detector) Sparse representation of the object appearance Collect features from whole training set Example: Class specific vocabulary


39 Leibe & Schiele 03/04: Generalized Hough Transform Learning: for every cluster, store possible occurrences Recognition: for new image, let the matched patches vote for possible object positions


")
40 Leibe & Schiele 03/04: Generalized Hough Transform Interest Points Matched Codebook Entries Probabilistic Voting Voting Space (continuous) Backprojection of Maximum



41 Scale Voting: Efficient Computation s s s s y y y y x x Scale votes Binned accum. array Candidate maxima Refinement (MSME) Mean-Shift formulation for refinement Scale-adaptive balloon density estimator













42 Detection Results Qualitative Performance Recognizes different kinds of cars Robust to clutter, occlusion, low contrast, noise
 Works well for many different object categories")

43 Discussion: ISM and related models Advantages Scale and rotation invariance can be built into the representation from the start Relatively cheap to learn and test (inference) Works well for many different object categories Max-margin extensions possible, Maji & Malik, CVPR09 Disadvantages Requires searching for modes in the Hough space Similar to sliding window in this respect Is such a degree of invariance required? (many objects are horizontal)
44 Beyond BOW II: Grids and spatial pyramids Start from BoW for ROI no spatial information recorded sliding window detector Bag of Words Feature Vector
45 Adding Spatial Information to Bag of Words Bag of Words Concatenate Feature Vector Keeps fixed length feature vector for a window [Fergus et al, 2005]
 the spatial")



46 Tiling defines (records) the spatial correspondence of the words parameter: number of tiles If codebook has V visual words, then representation has dimension 4V Fergus et al ICCV 05
47 Spatial Pyramid represent correspondence 1 BoW 4 BoW 16 BoW As in scene/image classification can use pyramid kernel [Grauman & Darrell, 2005] [Lazebnik et al, 2006]
 Patch / SIFT Quantize Word [Luong & Malik, 1999] [Varma &")
48 Dense Visual Words Why extract only sparse image fragments? Good where lots of invariance and matches are needed, but not relevant to sliding window detection? Extract dense visual words on an overlapping grid More detail at the expense of invariance Pyramid histogram of visual words (PHOW) Patch / SIFT Quantize Word [Luong & Malik, 1999] [Varma & Zisserman, 2003] [Vogel & Schiele, 2004] [Jurie & Triggs, 2005] [Fei-Fei & Perona, 2005] [Bosch et al, 2006]
49 Outline 1. Sliding window detectors 2. Features and adding spatial information 3. Histogram of Oriented Gradients + linear SVM classifier Dalal & Triggs pedestrian detector HOG and history Training an object detector 4. Two state of the art algorithms and PASCAL VOC 5. The future and challenges
50 Dalal & Triggs CVPR 2005 Pedestrian detection Objective: detect (localize) standing humans in an image Sliding window classifier Train a binary classifier on whether a window contains a standing person or not Histogram of Oriented Gradients (HOG) feature Although HOG + SVM originally introduced for pedestrians has been used very successfully for many object categories

 frequency orientation")
51 Feature: Histogram of Oriented image Gradients (HOG) dominant direction HOG tile 64 x 128 pixel window into 8 x 8 pixel cells each cell represented by histogram over 8 orientation bins (i.e. angles in range degrees) frequency orientation
 = 16 x 8 (for tiling) x 8 (orientations) x 4 (for")
52 Histogram of Oriented Gradients (HOG) continued Adds a second level of overlapping spatial bins renormalizing orientation histograms over a larger spatial area Feature vector dimension (approx) = 16 x 8 (for tiling) x 8 (orientations) x 4 (for blocks) = 4096


53 Window (Image) Classification Training Data Feature Extraction Classifier HOG Features Linear SVM classifier pedestrian/non-pedestrian






54

55 Averaged examples
56 Classifier: linear SVM Advantages of linear SVM: f(x) =w > x + b Training (Learning) Very efficient packages for the linear case, e.g. LIBLINEAR for batch training and Pegasos for on-line training. Complexity O(N) for N training points (cf O(N^3) for general SVM) Testing (Detection) Non-linear Linear f(x) = f(x) = SX i α i k(x i, x)+b SX i α i x i > x + b = w > x + b S = # of support vectors = (worst case ) N size of training data Independent of size of training data More on linear/non-linear in the image classification lab

57 Dalal and Triggs, CVPR 2005

58 Learned model f(x) = w > x + b average over positive training data

59 Slide from Deva Ramanan

60 Why does HOG + SVM work so well? Similar to SIFT, records spatial arrangement of histogram orientations Compare to learning only edges: Complex junctions can be represented Avoids problem of early thresholding Represents also soft internal gradients Older methods based on edges have become largely obsolete HOG gives fixed length vector for window, suitable for feature vector for SVM









61 Contour-fragment models Shotton et al ICCV 05, Opelt et al ECCV 06 Generalized Hough like representation using contour fragments Contour fragments learnt from edges of training images Hough like voting for detection σ T x 1 p x 6 x 2 x 5 x 3 x 4
62 Training a sliding window detector Object detection is inherently asymmetric: much more non-object than object data Classifier needs to have very low false positive rate Non-object category is very complex need lots of data
63 Bootstrapping 1. Pick negative training set at random 2. Train classifier 3. Run on training data 4. Add false positives to training set 5. Repeat from 2 Collect a finite but diverse set of non-object windows Force classifier to concentrate on hard negative examples For some classifiers can ensure equivalence to training on entire data set
 1607 upper body annotations jittered to 32k positive samples 55k negatives sampled from the same set of frames Second stage training (retraining) 150k hard negatives found in")
64 Example: train an upper body detector Training data used for training and validation sets 33 Hollywood2 training movies 1122 frames with upper bodies marked First stage training (bootstrapping) 1607 upper body annotations jittered to 32k positive samples 55k negatives sampled from the same set of frames Second stage training (retraining) 150k hard negatives found in the training data






65 Training data positive annotations
























66 Positive windows Note: common size and alignment
























67 Jittered positives






















68 Jittered positives























69 Random negatives























70 Random negatives
71 Window (Image) first stage classification Jittered positives random negatives HOG Feature Extraction Linear SVM Classifier f(x) =w > x + b find high scoring false positives detections these are the hard negatives for the next round of training cost = # training images x inference on each image
























72 Hard negatives



















73 Hard negatives
74 First stage performance on validation set
75 Precision Recall curve correct windows returned windows Precision: % of returned windows that are correct Recall: % of correct windows that are returned 1 all windows precision classifier score decreasing recall
76 First stage performance on validation set
77 Performance after retraining
78 Effects of retraining




79 Side by side before retraining after retraining




80 Side by side before retraining after retraining





81 Side by side before retraining after retraining


82 Tracked upper body detections
83 Notes Training (bootstrapping, retraining) can be done in a more principled way using Structured Output learning with the cutting plane algorithm See Christoph Lampert s presentation An object category detector can be learnt from a single positive example See Alyosha Efros presentation on the Exemplar SVM by Malisiewicz, Gupta, Efros, ICCV 2011

84 Accelerating Sliding Window Search Sliding window search is slow because so many windows are needed e.g. x y scale 100,000 for a image Most windows are clearly not the object class of interest Can we speed up the search?
85 Cascaded Classification Build a sequence of classifiers with increasing complexity More complex, slower, lower false positive rate Classifier 1 Classifier face 2 Possibly a Classifier face N Possibly a Face Window Non-face Non-face Non-face Reject easy non-objects using simpler and faster classifiers


![features [Viola & Jones, 2001] Type of SVM kernel](/docs-images/94/122298384/images/86-2.jpg "[Vedaldi et al, 2009] Number of parts [Felzenszwalb")
86 Cascaded Classification Slow expensive classifiers only applied to a few windows significant speed-up Controlling classifier complexity/speed: Number of support vectors [Romdhani et al, 2001] Number of features [Viola & Jones, 2001] Type of SVM kernel [Vedaldi et al, 2009] Number of parts [Felzenszwalb et al, 2011]





87 Summary: Sliding Window Detection Can convert any image classifier into an object detector by sliding window. Efficient search methods available. Requirements for invariance are reduced by searching over e.g. translation and scale Spatial correspondence can be engineered in by spatial tiling
88 Outline 1. Sliding window detectors 2. Features and adding spatial information 3. HOG + linear SVM classifier 4. Two state of the art algorithms and PASCAL VOC VOC challenge Vedaldi et al multiple kernels and features, cascade Felzenswalb et al multiple parts, latent SVM 5. The future and challenges
 Dataset and Challenge Mark")

89 The PASCAL Visual Object Classes (VOC) Dataset and Challenge Mark Everingham Luc Van Gool Chris Williams John Winn Andrew Zisserman
, detection (where are the X s), and segmentation (which pixels belong to X) Taster competitions in 2-D human pose estimation (2007- present) and static action classes (2010-present)")
90 The PASCAL VOC Challenge Challenge in visual object recognition funded by PASCAL network of excellence Publicly available dataset of annotated images Main competitions in classification (is there an X in this image), detection (where are the X s), and segmentation (which pixels belong to X) Taster competitions in 2-D human pose estimation (2007- present) and static action classes (2010-present) Standard evaluation protocol (software supplied)










91 Dataset Content 20 classes: aeroplane, bicycle, boat, bottle, bus, car, cat, chair, cow, dining table, dog, horse, motorbike, person, potted plant, sheep, train, TV Real images downloaded from flickr, not filtered for quality Complex scenes, scale, pose, lighting, occlusion,...
92 Complete annotation of all objects Annotation Annotated in one session with written guidelines Occluded Object is significantly occluded within BB Difficult Not scored in evaluation Truncated Object extends beyond BB Pose Facing left




















93 Examples Aeroplane Bicycle Bird Boat Bottle Bus Car Cat Chair Cow




















94 Examples Dining Table Dog Horse Motorbike Person Potted Plant Sheep Sofa Train TV/Monitor
95 Challenges 20 object classes 1. Classification Challenge: Name Objects Predict whether at least one object of a given class is present in an image 2. Detection Challenge: Localize objects Predict the bounding boxes of all objects of a given class in an image (if any) 3. Segmentation Challenge: For each pixel, predict the class of the object containing that pixel or background.
96 Detection: Evaluation of Bounding Boxes Area of Overlap (AO) Measure Ground truth B gt B gt B p Predicted B p Detection if > Threshold 50% Evaluation: Average precision per class on predictions
97 Precision/Recall - Motorbike NLPR_DD_DC (58.3) NYUUCLA_HIERARCHY (56.9) OXFORD_DPM_MK (56.6) NUS_CONTEXT_SVM (55.8) UVA_SELSEARCH (54.4) UOCTTI_LSVM_MDPM (50.3) MISSOURI_LCC_TREE_CODING (48.6) MISSOURI_TREE_MAX_POOLING (48.6) CMIC_GS_DPM (41.6) BROOKES_STRUCT_DET_CRF (41.1) CMIC_SYNTHDPM (38.6) CORNELL_ISVM_VIEWPOINT (38.2) precision recall
98 Precision/Recall - Person NLPR_DD_DC (51.6) UOCTTI_WL-SSVM_GRAMMAR (49.2) UOCTTI_LSVM_MDPM (46.3) NYUUCLA_HIERARCHY (43.6) OXFORD_DPM_MK (43.3) MISSOURI_TREE_MAX_POOLING (42.9) MISSOURI_LCC_TREE_CODING (41.9) CMIC_SYNTHDPM (40.7) BROOKES_STRUCT_DET_CRF (38.4) NUS_CONTEXT_SVM (36.8) UVA_SELSEARCH (30.4) CORNELL_ISVM_VIEWPOINT (7.9) precision recall
99 Precision/Recall Potted plant UVA_SELSEARCH (16.2) NLPR_DD_DC (14.7) NYUUCLA_HIERARCHY (14.3) NUS_CONTEXT_SVM (12.3) OXFORD_DPM_MK (12.1) MISSOURI_LCC_TREE_CODING (11.6) MISSOURI_TREE_MAX_POOLING (11.6) UOCTTI_LSVM_MDPM (8.8) CMIC_GS_DPM (8.3) CMIC_SYNTHDPM (7.5) CORNELL_ISVM_VIEWPOINT (1.7) BROOKES_STRUCT_DET_CRF (1.5) precision recall















100 True Positives - Motorbike NLPR_DD_DC NYUUCLA_HIERARCHY OXFORD_DPM_MK








101 False Positives - Motorbike NLPR_DD_DC NYUUCLA_HIERARCHY OXFORD_DPM_MK












102 True Positives - Cat NYUUCLA_HIERARCHY OXFORD_DPM_MK UVA_SELSEARCH









103 False Positives - Cat NYUUCLA_HIERARCHY OXFORD_DPM_MK UVA_SELSEARCH


104 Progress Results on 2008 data improve for best methods for almost all categories Caveats: More training data + re-use of test data
105 Multiple Kernels for Object Detection Andrea Vedaldi, Varun Gulshan, Manik Varma, Andrew Zisserman ICCV 2009
106 Approach Fast Linear SVM Jumping Window Feature vector Quasi-linear SVM Non-linear SVM Three stage cascade Each stage uses a more powerful and more expensive classifier Multiple kernel learning for the classifiers over multiple features Jumping window first stage



107 Multiple Kernel Classification PHOW Gray MK SVM PHOW Color combine one kernel per histogram PHOG PHOG Sym Feature vector [Varma & Rai, 2007] [Gehler & Nowozin, 2009] Visual Words SSIM






108 Jumping window Training Position of visual word with respect to the object learn the position/scale/aspect ratio of the ROI with respect to the visual word Detection Handles change of aspect ratio Hypothesis
109 SVMs overview First stage linear SVM (or jumping window) time: #windows Second stage quasi-linear SVM χ 2 kernel time: #windows #dimensions Third stage non-linear SVM χ 2 -RBF kernel time: #windows #dimensions #SVs Feature vector Fast Linear SVM Quasi-linear SVM Non-linear SVM Jumping Window



110 Results



111 Results




112 Results


113 Single Kernel vs. Multiple Kernels Multiple Kernels gives substantial boost Multiple Kernel Learning: small improvement over averaging sparse feature selection
114 Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwalb, David Mcallester, Deva Ramanan, Ross Girshick PAMI 2010


115 Approach Mixture of deformable part-based models One component per aspect e.g. front/side view Each component has global template + deformable parts Discriminative training from bounding boxes alone






116 Example Model One component of person model x 1 x 6 x 2 x 5 x 3 x 4 root filters coarse resolution part filters finer resolution deformation models

 p0 : location of root p1,.")

117 Object Hypothesis Position of root + each part Each part: HOG filter (at higher resolution) z = (p0,..., pn) p0 : location of root p1,..., pn : location of parts Score is sum of filter scores minus deformation costs



118 Score of a Hypothesis Appearance term Spatial prior displacements filters deformation parameters concatenation of filters and deformation parameters concatenation of HOG features and part displacement features Linear classifier applied to feature subset defined by hypothesis




119 Training Training data = images + bounding boxes Need to learn: model structure, filters, deformation costs Training

120 Latent SVM (MI-SVM) Classifiers that score an example x using β are model parameters z are latent values Which component? Where are the parts? Training data We would like to find β such that: Minimize SVM objective
121 Latent SVM Training Convex if we fix z for positive examples Optimization: Initialize β and iterate: Pick best z for each positive example Optimize β with z fixed Alternation strategy Local minimum: needs good initialization Parts initialized heuristically from root
122 Person Model root filters coarse resolution part filters finer resolution deformation models Handles partial occlusion/truncation


123 Person model with 3 left-right components Mixture model using max over multiple components with leftright pairs
124 Car Model root filters coarse resolution part filters finer resolution deformation models






125 Car Detections high scoring true positives high scoring false positives






126 Person Detections high scoring true positives high scoring false positives (not enough overlap)
127 Comparison of Models
: Latent variables can learn best alignment in the ROI")

128 Summary Multiple features and multiple kernels boost performance Discriminative learning of model with latent variables for single feature (HOG): Latent variables can learn best alignment in the ROI training annotation Parts can be thought of as local SIFT vectors Some similarities to Implicit Shape Model/Constellation models but with discriminative/careful training throughout NB: Code available for latent model!
129 Outline 1. Sliding window detectors 2. Features and adding spatial information 3. HOG + linear SVM classifier 4. Two state of the art algorithms and PASCAL VOC 5. The future and challenges
130 Current Research Challenges Context from scene properties: GIST, BoW, stuff from other objects, e.g. Felzenszwalb et al, PAMI 10 from geometry of scene, e.g. Hoiem et al CVPR 06 Occlusion/truncation Winn & Shotton, Layout Consistent Random Field, CVPR 06 Vedaldi & Zisserman, NIPS 09 Yang et al, Layered Object Detection, CVPR 10 3D Scaling up thousands of classes Torralba et al, Feature sharing ImageNet Weak and noisy supervision
131
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Object Detection with Discriminatively Trained Part Based Models
 Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search
 Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Object Recognition with Deformable Models
 Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Learning Representations for Visual Object Class Recognition
 Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
c 2011 by Pedro Moises Crisostomo Romero. All rights reserved.
 c 2011 by Pedro Moises Crisostomo Romero. All rights reserved. HAND DETECTION ON IMAGES BASED ON DEFORMABLE PART MODELS AND ADDITIONAL FEATURES BY PEDRO MOISES CRISOSTOMO ROMERO THESIS Submitted in partial
c 2011 by Pedro Moises Crisostomo Romero. All rights reserved. HAND DETECTION ON IMAGES BASED ON DEFORMABLE PART MODELS AND ADDITIONAL FEATURES BY PEDRO MOISES CRISOSTOMO ROMERO THESIS Submitted in partial
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Semantic Pooling for Image Categorization using Multiple Kernel Learning
 Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds
 Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds Sudheendra Vijayanarasimhan Kristen Grauman Department of Computer Science University of Texas at Austin Austin,
Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds Sudheendra Vijayanarasimhan Kristen Grauman Department of Computer Science University of Texas at Austin Austin,
Learning to Localize Objects with Structured Output Regression
 Learning to Localize Objects with Structured Output Regression Matthew B. Blaschko and Christoph H. Lampert Max Planck Institute for Biological Cybernetics 72076 Tübingen, Germany {blaschko,chl}@tuebingen.mpg.de
Learning to Localize Objects with Structured Output Regression Matthew B. Blaschko and Christoph H. Lampert Max Planck Institute for Biological Cybernetics 72076 Tübingen, Germany {blaschko,chl}@tuebingen.mpg.de
Action recognition in videos
 Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
EECS 442 Computer vision Databases for object recognition and beyond Segments of this lectures are courtesy of Prof F. Li, R. Fergus and A.
 EECS 442 Computer vision Databases for object recognition and beyond Segments of this lectures are courtesy of Prof F. Li, R. Fergus and A. Zisserman Why are we talking about datasets? This is computer
EECS 442 Computer vision Databases for object recognition and beyond Segments of this lectures are courtesy of Prof F. Li, R. Fergus and A. Zisserman Why are we talking about datasets? This is computer
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 16: Object recognition: Part-based generative models
 Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
An Efficient Divide-and-Conquer Cascade for Nonlinear Object Detection
 An Efficient Divide-and-Conquer Cascade for Nonlinear Object Detection Christoph H. Lampert Max Planck Institute for Biological Cybernetics, Tübingen, Germany chl@tuebingen.mpg.de Abstract We introduce
An Efficient Divide-and-Conquer Cascade for Nonlinear Object Detection Christoph H. Lampert Max Planck Institute for Biological Cybernetics, Tübingen, Germany chl@tuebingen.mpg.de Abstract We introduce
Loose Shape Model for Discriminative Learning of Object Categories
 Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model Pedro Felzenszwalb University of Chicago pff@cs.uchicago.edu David McAllester Toyota Technological Institute at Chicago mcallester@tti-c.org
A Discriminatively Trained, Multiscale, Deformable Part Model Pedro Felzenszwalb University of Chicago pff@cs.uchicago.edu David McAllester Toyota Technological Institute at Chicago mcallester@tti-c.org
Deformable Part Models with Individual Part Scaling
 DUBOUT, FLEURET: DEFORMABLE PART MODELS WITH INDIVIDUAL PART SCALING 1 Deformable Part Models with Individual Part Scaling Charles Dubout charles.dubout@idiap.ch François Fleuret francois.fleuret@idiap.ch
DUBOUT, FLEURET: DEFORMABLE PART MODELS WITH INDIVIDUAL PART SCALING 1 Deformable Part Models with Individual Part Scaling Charles Dubout charles.dubout@idiap.ch François Fleuret francois.fleuret@idiap.ch
An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b
 5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Detecting Objects using Deformation Dictionaries
 Detecting Objects using Deformation Dictionaries Bharath Hariharan UC Berkeley bharath2@eecs.berkeley.edu C. Lawrence Zitnick Microsoft Research larryz@microsoft.com Piotr Dollár Microsoft Research pdollar@microsoft.com
Detecting Objects using Deformation Dictionaries Bharath Hariharan UC Berkeley bharath2@eecs.berkeley.edu C. Lawrence Zitnick Microsoft Research larryz@microsoft.com Piotr Dollár Microsoft Research pdollar@microsoft.com
CLASSIFICATION Experiments
 CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
Object Recognition and Detection
 CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Kernels for Visual Words Histograms
 Kernels for Visual Words Histograms Radu Tudor Ionescu and Marius Popescu Faculty of Mathematics and Computer Science University of Bucharest, No. 14 Academiei Street, Bucharest, Romania {raducu.ionescu,popescunmarius}@gmail.com
Kernels for Visual Words Histograms Radu Tudor Ionescu and Marius Popescu Faculty of Mathematics and Computer Science University of Bucharest, No. 14 Academiei Street, Bucharest, Romania {raducu.ionescu,popescunmarius}@gmail.com
Video Google faces. Josef Sivic, Mark Everingham, Andrew Zisserman. Visual Geometry Group University of Oxford
 Video Google faces Josef Sivic, Mark Everingham, Andrew Zisserman Visual Geometry Group University of Oxford The objective Retrieve all shots in a video, e.g. a feature length film, containing a particular
Video Google faces Josef Sivic, Mark Everingham, Andrew Zisserman Visual Geometry Group University of Oxford The objective Retrieve all shots in a video, e.g. a feature length film, containing a particular
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
Learning Collections of Part Models for Object Recognition
 Learning Collections of Part Models for Object Recognition Ian Endres, Kevin J. Shih, Johnston Jiaa, Derek Hoiem University of Illinois at Urbana-Champaign {iendres2,kjshih2,jiaa1,dhoiem}@illinois.edu
Learning Collections of Part Models for Object Recognition Ian Endres, Kevin J. Shih, Johnston Jiaa, Derek Hoiem University of Illinois at Urbana-Champaign {iendres2,kjshih2,jiaa1,dhoiem}@illinois.edu
Multiple Kernels for Object Detection
 Multiple Kernels for Object Detection Andrea Vedaldi Varun Gulshan Manik Varma 2 Andrew Zisserman Department of Engineering Science University of Oxford {vedaldi,varun,az}@robots.ox.ac.uk 2 Microsoft Research
Multiple Kernels for Object Detection Andrea Vedaldi Varun Gulshan Manik Varma 2 Andrew Zisserman Department of Engineering Science University of Oxford {vedaldi,varun,az}@robots.ox.ac.uk 2 Microsoft Research
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Local Features based Object Categories and Object Instances Recognition
 Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Segmenting Objects in Weakly Labeled Videos
 Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Computer Vision: Summary and Discussion
 12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
Attributes. Computer Vision. James Hays. Many slides from Derek Hoiem
 Many slides from Derek Hoiem Attributes Computer Vision James Hays Recap: Human Computation Active Learning: Let the classifier tell you where more annotation is needed. Human-in-the-loop recognition:
Many slides from Derek Hoiem Attributes Computer Vision James Hays Recap: Human Computation Active Learning: Let the classifier tell you where more annotation is needed. Human-in-the-loop recognition:
Learning and Recognizing Visual Object Categories Without First Detecting Features
 Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Learning Object Representations for Visual Object Class Recognition
 Learning Object Representations for Visual Object Class Recognition Marcin Marszalek, Cordelia Schmid, Hedi Harzallah, Joost Van de Weijer To cite this version: Marcin Marszalek, Cordelia Schmid, Hedi
Learning Object Representations for Visual Object Class Recognition Marcin Marszalek, Cordelia Schmid, Hedi Harzallah, Joost Van de Weijer To cite this version: Marcin Marszalek, Cordelia Schmid, Hedi
Automatic Discovery of Meaningful Object Parts with Latent CRFs
 Automatic Discovery of Meaningful Object Parts with Latent CRFs Paul Schnitzspan 1 Stefan Roth 1 Bernt Schiele 1,2 1 Department of Computer Science, TU Darmstadt 2 MPI Informatics, Saarbrücken Abstract
Automatic Discovery of Meaningful Object Parts with Latent CRFs Paul Schnitzspan 1 Stefan Roth 1 Bernt Schiele 1,2 1 Department of Computer Science, TU Darmstadt 2 MPI Informatics, Saarbrücken Abstract
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Immediate, scalable object category detection
 Immediate, scalable object category detection Yusuf Aytar Andrew Zisserman Visual Geometry Group, Department of Engineering Science, University of Oxford Abstract The objective of this work is object category
Immediate, scalable object category detection Yusuf Aytar Andrew Zisserman Visual Geometry Group, Department of Engineering Science, University of Oxford Abstract The objective of this work is object category
6.819 / 6.869: Advances in Computer Vision
 6.819 / 6.869: Advances in Computer Vision Image Retrieval: Retrieval: Information, images, objects, large-scale Website: http://6.869.csail.mit.edu/fa15/ Instructor: Yusuf Aytar Lecture TR 9:30AM 11:00AM
6.819 / 6.869: Advances in Computer Vision Image Retrieval: Retrieval: Information, images, objects, large-scale Website: http://6.869.csail.mit.edu/fa15/ Instructor: Yusuf Aytar Lecture TR 9:30AM 11:00AM
Object detection. Announcements. Last time: Mid-level cues 2/23/2016. Wed Feb 24 Kristen Grauman UT Austin
 Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Incremental Learning of Object Detectors Using a Visual Shape Alphabet
 Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Mixture Component Identification and Learning for Visual Recognition
 Mixture Component Identification and Learning for Visual Recognition Omid Aghazadeh, Hossein Azizpour, Josephine Sullivan, and Stefan Carlsson Computer Vision and Active Perception laboratory (CVAP), KTH,
Mixture Component Identification and Learning for Visual Recognition Omid Aghazadeh, Hossein Azizpour, Josephine Sullivan, and Stefan Carlsson Computer Vision and Active Perception laboratory (CVAP), KTH,
Efficient Kernels for Identifying Unbounded-Order Spatial Features
 Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Segmentation as Selective Search for Object Recognition in ILSVRC2011
 Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Structured output regression for detection with partial truncation
 Structured output regression for detection with partial truncation Andrea Vedaldi Andrew Zisserman Department of Engineering University of Oxford Oxford, UK {vedaldi,az}@robots.ox.ac.uk Abstract We develop
Structured output regression for detection with partial truncation Andrea Vedaldi Andrew Zisserman Department of Engineering University of Oxford Oxford, UK {vedaldi,az}@robots.ox.ac.uk Abstract We develop
Recognizing human actions in still images: a study of bag-of-features and part-based representations
 DELAITRE, LAPTEV, SIVIC: RECOGNIZING HUMAN ACTIONS IN STILL IMAGES. 1 Recognizing human actions in still images: a study of bag-of-features and part-based representations Vincent Delaitre 1 vincent.delaitre@ens-lyon.org
DELAITRE, LAPTEV, SIVIC: RECOGNIZING HUMAN ACTIONS IN STILL IMAGES. 1 Recognizing human actions in still images: a study of bag-of-features and part-based representations Vincent Delaitre 1 vincent.delaitre@ens-lyon.org
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Learning to Localize Objects with Structured Output Regression
 Learning to Localize Objects with Structured Output Regression Matthew Blaschko and Christopher Lampert ECCV 2008 Best Student Paper Award Presentation by Jaeyong Sung and Yiting Xie 1 Object Localization
Learning to Localize Objects with Structured Output Regression Matthew Blaschko and Christopher Lampert ECCV 2008 Best Student Paper Award Presentation by Jaeyong Sung and Yiting Xie 1 Object Localization
Templates and Background Subtraction. Prof. D. Stricker Doz. G. Bleser
 Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
Object Classification Problem
 HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
Fusing shape and appearance information for object category detection
 1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
Object Category Detection: Sliding Windows
 03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections
 Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,