arxiv: v1 [cs.cv] 10 Aug 2018
|
|
|
- Randolph Wilfred Stokes
- 5 years ago
- Views:
Transcription

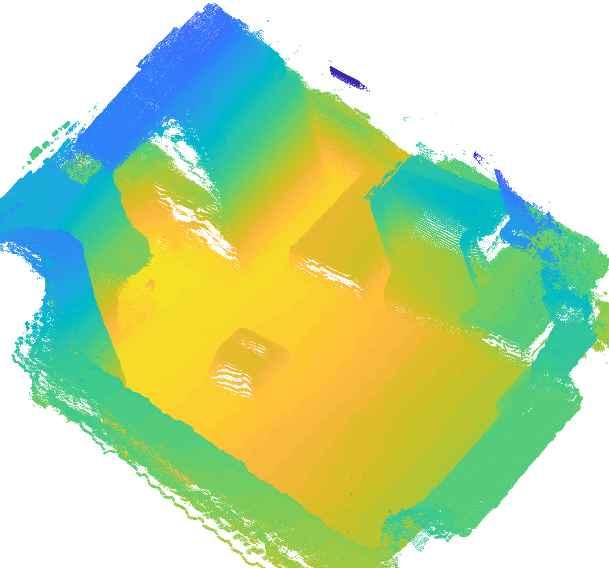
![cv] 10 Aug 2018 Abstract A major element of depth perception and 3D understanding is the ability to predict the 3D layout of a scene and its contained objects for a novel pose.](/docs-images/94/118960501/images/1-1.jpg "Indoor environments are particularly suitable for novel view prediction, since the set of objects in such environments is relatively restricted.")
1 Weakly supervised learning of indoor geometry by dual warping Pulak Purkait Ujwal Bonde Christopher Zach Toshiba Research Europe, Cambridge, U.K. {pulak.cv, ujwal.bonde, arxiv: v1 [cs.cv] 10 Aug 2018 Abstract A major element of depth perception and 3D understanding is the ability to predict the 3D layout of a scene and its contained objects for a novel pose. Indoor environments are particularly suitable for novel view prediction, since the set of objects in such environments is relatively restricted. In this work we address the task of 3D prediction especially for indoor scenes by leveraging only weak supervision. In the literature 3D scene prediction is usually solved via a 3D voxel grid. However, such methods are limited to estimating rather coarse 3D voxel grids, since predicting entire voxel spaces has large computational costs. Hence, our method operates in image-space rather than in voxel space, and the task of 3D estimation essentially becomes a depth image completion problem. We propose a novel approach to easily generate training data containing depth maps with realistic occlusions, and subsequently train a network for completing those occluded regions. Using multiple publicly available dataset [18, 12] we benchmark our method against existing approaches and are able to obtain superior performance. We further demonstrate the flexibility of our method by presenting results for new view synthesis of RGB-D images. 1. Introduction Scene completion has drawn a lot of attention recently from the computer vision [19], robotics [9] as well as the neuroscience community [5]. Most of these works are driven by the assumption that 3D scene completion is important for 3D scene understanding which in turn is useful for tasks such as robot navigation. Towards this end, recent works have addressed 3D scene completion by semantic voxel filling [18, 1]. However, these approaches are limited as follows: (i) semantic labeling of 3D voxels will generally produce coarse labelings in order to be computationally feasible, and (ii) labeling of voxels in the object interior might be redundant as one is mostly interested in object surfaces. Therefore, we focus on predicting detailed surfaces rather than semantic voxels. Moreover, methods Figure 1. Given an input depth image proposed network can generate multiple depth images which can be further combined for 3D scene completion. predicting entire voxel grids rely on large labeled datasets that are expensive to create and label [18]. In contrast, our system does not require any additional labeled data and only relies on calibrated depth images which are easy to acquire using existing RGB-D sensors [16]. An instance of the predicted output is displayed in Fig. 1. In summary our contributions are as follows: We propose a network architecture to predict depth at arbitrary viewpoints given a single depth image. The network is trained solely using unlabeled depth images without relying on additional supervision signals. 2. Literature Review In computer vision literature the problem of scene completion was addressed by some of the earliest work into human perception understanding [10], where it is conjectured that human perception relies on its ability to complete scenes. With the availability of cheap sensors [16] and computational resources a renewed interest is seen in this field. In [18, 2] the authors predict the complete 3D scene from a single depth image using a network to learn shape prior of indoor objects. Given a new scene they predict the voxelised volume with semantic labels for each voxel along with its occupancy probability. Learning these prior requires a large synthetic dataset [18, 1] or the need to manually label real world data [12], both of which are expensive procedures. In comparison our method solely relies 1
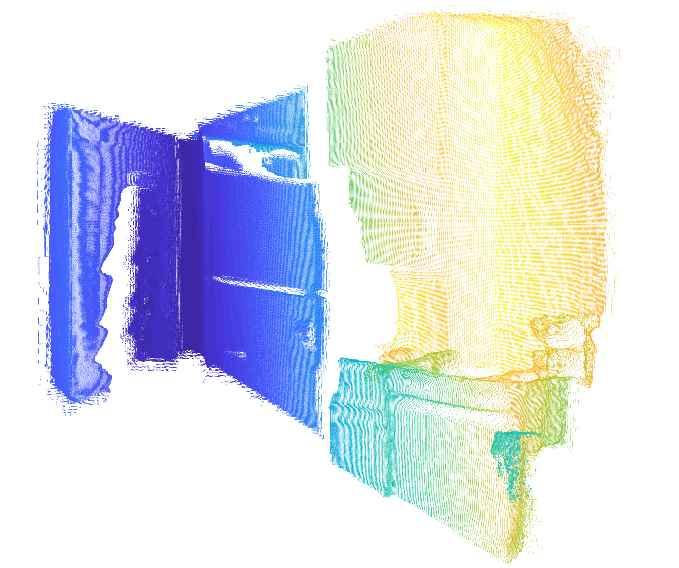
 An instance of our training set Figure 2. We avoid predicting depth at the target pose, i.e., P depth prediction network O, by the following depth completion strategy: P warp to target pose Õ depth completion network O.")
2 Input Depth P warped to target pose X Depth prediction network X Depth at target pose O Depth completion Network ~ O Ground-truth generation P ( O, ~ O ) Original and occluded depth pair (a) Our strategy of depth prediction (b) An instance of our training set Figure 2. We avoid predicting depth at the target pose, i.e., P depth prediction network O, by the following depth completion strategy: P warp to target pose Õ depth completion network O. on (synthetically) transforming calibrated depth images to generate training data. Moreover the final prediction in the above-mentioned works is a coarse grid of voxels whereas our system outputs a full-resolution depth image for a desired viewpoint. Our approach shares similarities with [22] and [13], which also use displacement fields to solve an image completion/inpainting task. However, these methods are restricted to single or few objects and its unclear how they would generalize to natural scenes. We model the scene completion task as an instance of depth image inpainting (e.g. [7]). Using low rank approximations is a popular framework for image inpainting [6]. In [20] the authors extend this approach from RGB to depth images using additional regularization to the gradients. Similar to our work they do not require additional labeled data. However the noise patterns used in image inpainting are often either random and unstructured (e.g. salt and pepper noise) or structured but artificial (e.g. text superimposition). In contrast this work explicitly considers naturally occurring structured missing regions, i.e occlusions generated by warping images based on a given depth map. The authors of [14, 23] use RGB information to complete a sparse depth image. This is restrictive as we can only complete viewpoints that have corresponding RGB images. On the other hand as we do not rely on RGB images we are able to synthesize arbitrary viewpoints within a reasonably distance from the observed depth map. 3. Dataset generation via dual warping Given a depth image at a particular pose our target is to generate depth views at arbitrary locations. A natural way to accomplish this would be to generate a pair of depth images of the same scene from different view-points and use them as ground truth. However, for this we would require the complete 3D model of a scene from which synthetic pairwise views could be generated, i.e. two different depth images of the same scene with the ground truth poses. These 3D models are rarely available or time-consuming to acquire. In this work we exploit a novel strategy to generate training data solely from given depth images. Let P be a given depth image and O be the depth image at the target pose that we want to estimate. The estimation of the depth image at a novel view-point P O consists of is modelled via two stages: (i) a geometric warping step and (ii) filling of the occluded regions. The former is very straight-forward and can be computed efficiently. Thus, we pose the novel view generation as a depth completion problem (Fig. 2). A convolutional network is trained for this task. A strongly supervised approach requires training data consisting of depth map pairs (O, ÕP ), where ÕP is the depth map P warped to the pose of O, and the task of the DNN is to fill in missing depth values in ÕP to match O. It therefore requires acquisition of multiple (at least two) depth maps for each scene, and a strongly supervised method is consequently not applicable on e.g. unordered collections of unrelated depth maps. Thus, we replace the strongly supervised task by a weakly supervised one, which as a by-product turns out to be also less challenging in terms of problem difficulty (see below). Let Õ be the depth map obtained by warping P O (i.e. O warped to the pose of P ) back to the pose of O, then the training data consists of pairs (O, Õ). Since a given depth map is warped twice we call it dual warping (see Fig. 2). It only requires independent depth images {O} and a method to generate realistic nearby poses (corresponding to the poses of depth maps {P }, if they were supplied). Thus, we state our first strategy for training data generation below: Strategy 1. The occlusion O\Õ generated by warping forth and back serves us the ground truth occluded and complete image pair (Õ, O). Note that some parts of the depth map O become occluded during the dual warping. Further, O y = Õy for all pixels y with visible depth Õy > 0, and e.g. Õy = 0 for occluded pixels. To this end, one can raise a fundamental question: why does one require a complex strategy 1 to train a depth completion network. A straight-forward choice would be following one: 2
![(a) (b) (c) (d) Figure 3. (a) An instance of a real depth image from NYU Dataset [12] where pixels with unknown depths (NaN) are marked with zero.](/docs-images/94/118960501/images/3-0.jpg "(b) Depth after warped forth and back from the original depth to a random location and orientation. (c) Same as (b) but projected with upscaling with resolution factor 2 to reduce the aliasing affect.")
 can serve as the ground truth for depth image completion.")
3 (a) (b) (c) (d) Figure 3. (a) An instance of a real depth image from NYU Dataset [12] where pixels with unknown depths (NaN) are marked with zero. (b) Depth after warped forth and back from the original depth to a random location and orientation. (c) Same as (b) but projected with upscaling with resolution factor 2 to reduce the aliasing affect. (d) An additional instance of (c) with opposite view-points. Note that the pairs ((c), (a)) and ((d), (a)) serve as the ground truths for our depth completion network. Strategy 2. Removing random regions at arbitrary pixel locations in the depth images the occluded and the original depth image pair (Õ, O) can serve as the ground truth for depth image completion. However, we argue that there is a clear shift in domains between the training data (where random missing regions are presented to the network) and test data (where missing regions are occurring due to occlusions). We claim (and experimentally verify) that strategy 1 brings the training distribution closer to the test distribution, and its properties are further discussed in Sec In Sec. 5.2 we also validate that strategy 2 performs inferior to our dual warping strategy 1 for dataset generation Warping procedure Let (x, y) be the original pixel coordinates of the depth image and K = [f, 0, x; 0, f, ȳ; 0, 0, 1] be the camera matrix where f is the focal length and ( x, ȳ) are the principle point of the camera. Further, let s xy be the depth at pixel (x, y). The depth at the corresponding pixel (x, y ) at the relative pose (R, T ) can be written as s x y x = K(RK 1 s xy x + T ) (1) where x and x are the homogeneous pixel co-ordinates at (x, y) and (x, y ) respectively. We utilize (1) for forward and backward warping. Hence, our warping procedure essentially corresponds to rendering of 3D point clouds with a z-buffer test enabled for hidden surface removal. In the following section we postulate and empirically validate that the above strategy will not introduce any additional occlusion (up to aliasing effects due to point instead of mesh rendering). Further, the aliasing effect is addressed by upscaling the depth image by a factor of 2 before warping to the target pose. Note that the camera matrices are modified accordingly (i.e.[2f, 0, 2 x; 0, 2f, 2ȳ; 0, 0, 1]) while warping with the higher resolutions. The effectiveness of our warping strategy is demonstrated by the example shown in Fig. 3. Each depth image is warped to a random pose and then warped back to the original pose. These random poses O P Q Figure 4. An example where ÕP (warped forth and back to the pose P ) and P [O] observe similar objects (marked by blue). In contrast, ÕQ (warped forth and back to the pose Q) observe more objects than Q [O] (marked by red). are generated on the horizontal plane where the translation and orientation increments are uniformly sampled within the range of [ 1m, 1m] and [ 15, 15 ]. Our synthesized poses thus emulate essentially the lateral motion of a handheld depth camera. The axis of the angular shift is chosen as vertical. Each warping generates a pair of original and occluded image. We generate 25 different original-occluded image pairs for each depth image. Thus the size of our ground truth dataset is 25 the original depth image dataset. Note that Õ and P [O] are depth images observe scene areas visible from both of the poses of O and P Analysis of the generated occlusion patterns Although in strategy 1 we warp twice (to and from a random location), we (essentially) do not introduce any additional occlusions. In fact, the occluded region generated by the strategy is contained in the occluded region generated by warping an actual depth image P at the random pose to the original pose: Lemma 1. The occlusion O \ Õ O \ P [O] where P [O] is the depth image generated by the warping the depth image 3
4 Figure 5. Architecture: The encoder and the decoder is marked by gray and white respectively. The network estimates 2D flow of the source and the target pixel locations of similar depth. The depth at the source locations are copied at the target pixel locations with the unknown depth. The depth at the known pixel locations are kept unaltered. The network is trained with the training image pairs (O, Õ) and minimize the L l1 loss of the occluded part [see eq. (3)]. No that no direct supervision for the source and target flow is provided and let the network learn the flow directions for which the loss is minimum. P to the original pose. Further, if the camera at P does not observe any additional objects, then O \ Õ = O \ P [O]. Proof. Let us denote the warping step of a depth map O into the pose of P yielding O [P ] by O warp O [P ], and P let Õ := (O[P ] ) [O] be the result of dual warping O warp O [P ] warp O Õ. By construction a 3D point X visible in O (written as X O) is not visible in Õ iff X / O[P ]. Compared to O [P ] the true depth map P may contain additional surfaces occluding X at the pose of P, hence X / O [P ] (or X / Õ) implies X / P (equivalence holds if P has no additional occluders not present in O [P ] blocking X, see Fig. 4). 1 Together with X / P implying X / P [O] we have that X / Õ is a sufficient condition for X / P [O], or O \ Õ O \ P [O]. 4. Architecture and loss We follow the U-Net architecture very similar to [15]. Its a feed-forward convolutional network consists of an encoder and a symmetric decoder, where a number of skip connections is introduced by concatenating the features from the encoder layer to the corresponding decoder layer. The network takes an input depth image of size and passes the input through multiple convolutional and deconvolutional layers (with stride 2) to predict a 2D displacement field of the same size as the input. Here the displacements (similar to pixel-shifts [21]) indicate shifts between the source pixel and target pixel location. Note that target pixel locations are the pixels with missing depth. The task of the network is to predict the corresponding source pixel locations (from which the known depth value is subsequently copied) instead of directly hallucinating the depth value at the target pixel location. The details of the architecture can also be found in Fig. 5. Note that experimentally we observe (validated in the result section) that dis- 1 The vertical line segments are not visible from O. P placement estimation network performs better than the direct depth prediction network. In contrast to the single image depth prediction networks [3] (RGB to depth), in our case the depth for unknown regions is indirectly estimated by copying from known depth map portions. We utilize a masked l 1 loss L l1 in this work. The mask Ω is considered as the pixels with the unknown depths Ω := O \ Õ. We also incorporate a total variation loss L tv to ensure smooth depth predictions, and we further leverage a content loss [8], L c, to preserve structure of the depth image as described below: L tv = ) ( O y Ôy 1 + λ Ôy 1 (2) y Ω L c = γ y Ω φ l (O) y φ l (Õ) y 1 (3) where Ôy is the predicted depth at the pixel y and φ l are the feature descriptors at the layer l. Note that the depth is predicted only at the unknown pixels and the feature descriptors in the loss (3) is only considered for the last two layers. The network is trained to minimize the sum of the above loss L l1 = L tv + L c. λ and γ are chosen as 10 3 and 10 5 respectively. 5. Experiments The proposed depth completion network (named as Depth-Flow-Net) is evaluated on the widely used SUNCG [18] and NYU Depth v2 [12] datasets. The loss L l1 is minimized using ADAM with a mini-batch of size 10. The weight decay is set to The network is trained for 100 epochs with an initial learning rate which is gradually decreased by a factor of 10 after every 10 epochs. The network is trained with Tensorflow on a desktop equipped with a NVIDIA Titan X GPU, and evaluated on an Intel CPU of 3.10GHz. Baseline Methods We compare the proposed network against the following baselines: 4
5 The straight forward network for predicting depth directly (named as Depth-Net) instead of predicting depthflow (Depth-Flow-Net) at the unknown pixels. Depth- Net is employed as baseline in this work. Low rank completion (LR) [20]: The missing depth values are computed by low rank matrix completion with low gradient regularization. 2 Highly sparse inpainting (Semantic) [14]: Region-based depth recovery for highly sparse depth maps. 3 This method requires semantic labels of different objects present in the depth image. Fortunately, the datasets used in this work contain semantic labels which have been employed during the evaluation of this baseline. Note that none of the other methods including ours do not require semantic labels. PDE-based inpainting (PDE) [17]: Partial differential equation based anisotropic diffusion model for image inpainting is executed as baseline for RGB inpainting. Mumford-Shah inpainting (MS) [4]: The traditional image inpainting based on Mumford-Shah-Euler model is also evaluated as baseline Depth image completion SUNCG [18] is a large-scale synthetic dataset contains 45, 622 depth images of different scenes with realistic rooms and furniture layouts. The NYU depth dataset [12] consists of 1, 449 real depth images of indoor environment of commercial and residential buildings. The datasets also consists of semantic object labels which are not utilized in this work. In each epoch we select a batch of 2, 000 depth image pairs (original and with occlusions) generated by our augmentation technique. More augmented images are generated by random cropping and flipping the images in the left/right direction. Quantitative Evaluation The proposed network is evaluated for the task of generating new depth views. For this task a set of 100 testing image pairs of the same scene at different view-points and orientations is generated from SUNCG [18] datasets. 5 One is considered as the depth at the source pose and the other considered as depth at the target pose. The depth image at the source pose is first warped at the target pose and then fed into the depth completion network Depth-Flow-Net. In Table 1, we display the mean and median depth prediction error evaluated only at the unknown pixels. For NYU Depth v2 [12] datasets, no complete 3D model is available. Thus, we rely on the dual warping technique 2 code is available at 3 code is available at 4 code is available at 5 code is available at Table 1. Depth completion Comparison : SUNCG datasets [18] LR [20] Semantic [14] Ours Mean error 0.34m 0.33m 0.28m Median error 0.25m 0.23m 0.05m Table 2. Depth completion Comparison : NYU datasets [12] LR [20] Semantic [14] Ours Mean error 0.42m 0.37m 0.38m Median error 0.26m 0.20m 0.06m (strategy 1) to generate test data. In Table 2 we observe that existing depth inpainting algorithms [20] and [14] perform comparably, whereas the proposed depth prediction method improves the median error significantly. A detailed description of the runtime can also be found in Table 3. We observe Depth-Flow-Net is fastest among the depth completion benchmark methods. Note that all the methods including ours are evaluated on a CPU. The estimation of 2D displacements, depth completion, and generation of new view are included in the runtime. Qualitative Evaluation The network is again used to evaluate for the task of generating new depth views. Separate sets of depth images are chosen as test sets. Each depth image of the test set is warped w.r.t. a randomly sampled target pose (with position and orientation variations from the range of [ 1m, 1m] and [ 15, 15 ]). The proposed depth completion network is then employed for depth completion at the occluded regions. The novel view generation results are plotted in Fig. 8. Although, direct depth estimation network Depth-Net produces reasonable solutions in some cases, we observe that proposed dispacement-field based Depth-Flow-Net produces more consistent solutions. The estimated displacements are displayed by green lines segments while target pixels are marked with blue dots. In order to enhance the quality of completed depth maps, we utilize an ensemble-inspired framework: after warping the current depth maps to multiple nearby poses, the induced occlusions are completed using Depth-Flow-Net. The resulting depth maps are warped back to the original pose and are subsequently merged using a pixel-wise median filter (which we use as a efficient surrogate for a more refined approach for depth maps fusion such as [11]). Examples for such 3D scene completion can be found in Fig. 8(c) and Fig. 8(e). Note that signed distance functions (i.e. volumetric fusion) could be applied to obtain smoother surfaces. However, we leave this for future work. More results can be found in the supplementary material. 5
 synthetic train data (a) A sample depth (b) Completed depth (c) Estimated flow (c) Input (d) trained with Strategy 1 (e) trained with Strategy 2 Figure 6.")
 is trained with the alternative strategy compared to the dual warping strategy. 5.2.")

![The size of each removed region is chosen uniformly within the range [1, 50] along both the directions. We train Depth-Net for both the datasets generated by strategy 1 and 2.](/docs-images/94/118960501/images/6-3.jpg "Note that in the current experiment Depth-Net is chosen over Depth- Flow-Net to demonstrate that strategy 1 does not just favor a displacement-based network, but enhances the problem itself.")

) the background depth may incorrecly spill over into the foreground object (Fig. 7(b,c)).")

 A sample depth (e) Completed depth (f) Estimated flow Figure 7.")
6 (a) A sample depth (b.1) synthetic train data (b.2) synthetic train data (a) A sample depth (b) Completed depth (c) Estimated flow (c) Input (d) trained with Strategy 1 (e) trained with Strategy 2 Figure 6. Experiment with alternative strategy: Removing random blocks. We observe more ghosting artifacts if the same network (Depth-Net) is trained with the alternative strategy compared to the dual warping strategy Validation of dual warping for dataset creation To validate our synthetic dataset generation method (strategy 1), we conduct an experiment with a dataset generated by strategy 2. For each depth image the missing regions are generated by removing random regions of pixels. Up to 20% of all pixels are removed. The size of each removed region is chosen uniformly within the range [1, 50] along both the directions. We train Depth-Net for both the datasets generated by strategy 1 and 2. Note that in the current experiment Depth-Net is chosen over Depth- Flow-Net to demonstrate that strategy 1 does not just favor a displacement-based network, but enhances the problem itself. The results are displayed in Fig. 6. We observe more accurate depth prediction with strategy 1. Thus the current experiment validates our argument of minimal domain shift of novel view generation with strategy Limitation / Failure cases Despite the generally good performance of Depth-Flow- Net we have encountered failure cases, usually caused by the following: In the presence of large occlusions on foreground objects (e.g. Fig. 7(a)) the background depth may incorrecly spill over into the foreground object (Fig. 7(b,c)). Very large occlusions (or otherwise regions with missing depth, such as in Fig. 7(d)) can lead to displacement vectors that point themselves to missing data (Fig. 7(e,f)). In our current approach there is no guarantee that the displacement field always refers to valid depth. Despite the above limitations, proposed Depth-Flow-Net produces satisfactory results in a wide variety of depth images. A number of examples are included in the supplementary material. (d) A sample depth (e) Completed depth (f) Estimated flow Figure 7. Failure cases: Two different instances of NYU (a) and SUNCG (d) datasets where proposed Depth-Flow-Net fails due to the limitations in the current approach. See text for more details. Table 3. Runtime Comparison: evaluated on CPU MS [4] PDE [17] LR [20] Semantic [14] Ours Runtime 114.8s 4.07s 73s 5.81s 0.7s Table 4. Quantitative comparison of RGB image completion PDE [17] MS [4] Ours PSNR 24.9dB 24.7dB 26.08dB 5.4. Novel RGBD image synthesis We also exploit our image augmentation strategy for new view RGBD image synthesis given a single RGBD image. We utilize a similar augmentation (strategy 1) to generate the ground truth for RGBD image completion. A network similar to Depth-Flow-Net is trained on the augmented RGB-D datasets of (original-occluded) pairs. In contrast to depth estimation it takes 4D channels as input and estimate 2D displacements from source to target regions. Once the network is trained we warp the original view to the target views and complete the missing pixels using the predicted displacement field. We conduct similar procedure as before for quantitative and qualitative evaluation. A quantitative comparison can be found in Table 4 and a qualitative comparison is displayed in Fig. 9. We observe an improvement of PSNR compared to the traditional in-painting algorithms. More results can be found in the supplementary document. 6. Evaluation on SUNCG [18] dataset To evaluate the proposed method on SUNCG [18] datasets, we utilize similar evaluation dataset generation technique as NYU [12] datasets. We warp the current depth maps to multiple nearby poses and the induced occlusions are completed by proposed Depth-Flow-Net. The results are displayed in Fig. 10 and Fig. 11 along with the estimated depth flow. Note that the depth-flow is estimated at every pixels but in the figure we only show the flow at the 6
 input depth (e)")

![[Depth-Flow-Net] [Depth-Net] LR](/docs-images/94/118960501/images/7-3.jpg "[20] Semantic [14] Input (a)")
 (h) Translation 0.")
 (j) Translation 0.")






7 (b) 3D plot of (a) (c) scene completion (d) input depth (e) 3D plot of (d) (f) scene completion [Flow] [Depth-Flow-Net] [Depth-Net] LR [20] Semantic [14] Input (a) input depth (g) Translation 0.5m (left) (h) Translation 0.5m (right) (i) Translation 0.5m (left) (j) Translation 0.5m (right) Figure 8. Qualitative results of depth completion methods at different viewing location and orientation on NYU Depth v2 [12] dataset. Images are first warped to the target pose and then use depth completion methods to predict depth at the occluded regions. Depth-Flow-Net produces less artifacts and can even hallucinate handles of the chairs. A complete video is shown in the supplementary material. 7
8 unknown pixels with a regular 4 pixel interval. 7. Conclusion In this work we develop a technique to complete 3D scenes indirectly by filling occluded regions in warped depth (and optionally RGB) images. Hence, we are able to avoid a costly volumetric representation and consequently work in higher-resolution image-space. Our main contribution is the generation of training data via dual warping, which adds realistic occlusion patterns to given depth images. Therefore large amounts of training data are easy to acquire. We also perform a thorough evaluation to demonstrate the effectiveness of our weakly supervised approach and to show the efficiency of a proposed depth completion network. Further, the flexibility of the proposed method is emphasized by an evaluation on RGB-D data. Currently, the proposed method is limited to generating depth images of relatively nearby poses, which is a restriction addressed in future research. References [1] Angela Dai, Angel X Chang, Manolis Savva, Maciej Halber, Thomas Funkhouser, and Matthias Niessner. ScanNet: Richly-Annotated 3D Reconstructions of Indoor Scenes. In Proc. of CVPR, pages , [2] Angela Dai, Daniel Ritchie, Martin Bokeloh, Scott Reed, Jürgen Sturm, and Matthias Nießner. ScanComplete: Large-Scale Scene Completion and Semantic Segmentation for 3D Scans. CVPR, [3] David Eigen, Christian Puhrsch, and Rob Fergus. Depth map prediction from a single image using a multi-scale deep network. In Advances in neural information processing systems, pages , [4] Selim Esedoglu and Jianhong Shen. Digital inpainting based on the mumford shah euler image model. European Journal of Applied Mathematics, 13(4): , [5] John H Gennari, Pat Langley, and Doug Fisher. Models of incremental concept formation. Artificial intelligence, 40(1-3):11 61, [6] Christine Guillemot and Olivier Le Meur. Image inpainting: Overview and recent advances. IEEE signal processing magazine, 31(1): , [7] Satoshi Iizuka, Edgar Simo-Serra, and Hiroshi Ishikawa. Globally and locally consistent image completion. ACM Transactions on Graphics (TOG), 36(4):107, [8] Justin Johnson, Alexandre Alahi, and Li Fei-Fei. Perceptual losses for real-time style transfer and superresolution. In European Conference on Computer Vision, pages Springer, [9] Kevin Lai, Liefeng Bo, and Dieter Fox. Unsupervised feature learning for 3d scene labeling. In Robotics and Automation (ICRA), 2014 IEEE International Conference on, pages IEEE, [10] DC Marr. A computational investigation into the human representation and processing of visual information. Freeman, San Francisco, CA, [11] Paul Merrell, Amir Akbarzadeh, Liang Wang, Philippos Mordohai, Jan-Michael Frahm, Ruigang Yang, David Nistér, and Marc Pollefeys. Real-time visibility-based fusion of depth maps. In IEEE 11th International Conference on Computer Vision (ICCV), pages 1 8. IEEE, [12] Derek Hoiem Pushmeet Kohli Nathan Silberman and Rob Fergus. Indoor Segmentation and Support Inference from RGBD Images. In Proc. of ECCV, pages , [13] Eunbyung Park, Jimei Yang, Ersin Yumer, Duygu Ceylan, and Alexander C Berg. Transformationgrounded image generation network for novel 3d view synthesis. In 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages IEEE, [14] Said Pertuz and Joni Kamarainen. Region-based depth recovery for highly sparse depth maps. In Image Processing (ICIP), 2017 IEEE International Conference on, pages IEEE, [15] Olaf Ronneberger, Philipp Fischer, and Thomas Brox. U-net: Convolutional networks for biomedical image segmentation. In International Conference on Medical image computing and computer-assisted intervention, pages Springer, [16] Ling Shao, Jungong Han, Dong Xu, and Jamie Shotton. Computer vision for RGB-D sensors: Kinect and its applications [special issue intro.]. IEEE transactions on cybernetics, 43(5): , [17] Jianhong Shen and Tony F Chan. Mathematical models for local nontexture inpaintings. SIAM Journal on Applied Mathematics, 62(3): , [18] Shuran Song, Fisher Yu, Andy Zeng, Angel X Chang, Manolis Savva, and Thomas Funkhouser. Semantic scene completion from a single depth image. In Proc. of CVPR, pages ,

![[Depth-Flow-Net] [Depth-Net] [Depth-Net] MS [4]](/docs-images/94/118960501/images/9-1.jpg "LR [20] Input Input (a) input depth (e)")
 (g) Translation 0.")
 Qualitative results of depth completion")



![[19] Jiajun Wu, Yifan Wang, Tianfan Xue,](/docs-images/94/118960501/images/9-8.jpg "Xingyuan Sun, Bill Freeman, and Josh Tenenbaum.")
9 (b) 3D plot of (a) (c) 3D scene completion (d) Input RGB [Flow] [Flow] [Depth-Flow-Net] [Depth-Flow-Net] [Depth-Net] [Depth-Net] MS [4] LR [20] Input Input (a) input depth (e) Translation 0.5m (left) (f) Translation 0.5m (right) (g) Translation 0.5m (left) (h) Translation 0.5m (right) Figure 9. (a) Qualitative results of depth completion methods at different viewing location and orientation. The same network used for RGB image completion to obtain a new RGB image at the target pose. A complete video is shown in the supplementary material. [19] Jiajun Wu, Yifan Wang, Tianfan Xue, Xingyuan Sun, Bill Freeman, and Josh Tenenbaum. Marrnet: 3d shape reconstruction via 2.5 d sketches. In Ad- vances In Neural Information Processing Systems, pages ,
")
")




















10 (a) Input Depth (b) Projected in 3D (c) Proposed completion (d) Completion by SSC-Net [18] Figure 10. (a) Qualitative results of depth completion methods at different viewing location and orientation on NYU [12] datasets. Images are first warped to the target pose and then use proposed depth completion method to predict depth at the occluded regions and subsequently merged. 10
")
")






















11 (a) Input Depth (b) Projected in 3D (c) Proposed completion (d) Completion by SSC-Net [18] Figure 11. (a) Qualitative results of depth completion methods at different viewing location and orientation on NYU [12] datasets. Images are first warped to the target pose and then use proposed depth completion method to predict depth at the occluded regions and subsequently merged. 11
12 [20] Hongyang Xue, Shengming Zhang, and Deng Cai. Depth image inpainting: Improving low rank matrix completion with low gradient regularization. IEEE Transactions on Image Processing, 26(9): , [21] Zhaoyi Yan, Xiaoming Li, Mu Li, Wangmeng Zuo, and Shiguang Shan. Shift-net: Image inpainting via deep feature rearrangement. arxiv preprint arxiv: , [22] John Zelek and Nolan Lunscher. Point cloud completion of foot shape from a single depth map for fit matching using deep learning view synthesis. In Computer Vision Workshop (ICCVW), 2017 IEEE International Conference on, pages IEEE, [23] Yinda Zhang and Thomas Funkhouser. Deep Depth Completion of a Single RGB-D Image. arxiv preprint arxiv: ,
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
3D Scene Understanding from RGB-D Images. Thomas Funkhouser
 3D Scene Understanding from RGB-D Images Thomas Funkhouser Recent Ph.D. Student Current Postdocs Current Ph.D. Students Disclaimer: I am talking about the work of these people Shuran Song Yinda Zhang Andy
3D Scene Understanding from RGB-D Images Thomas Funkhouser Recent Ph.D. Student Current Postdocs Current Ph.D. Students Disclaimer: I am talking about the work of these people Shuran Song Yinda Zhang Andy
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Visual Computing TUM
 Visual Computing Group @ TUM Visual Computing Group @ TUM BundleFusion Real-time 3D Reconstruction Scalable scene representation Global alignment and re-localization TOG 17 [Dai et al.]: BundleFusion Real-time
Visual Computing Group @ TUM Visual Computing Group @ TUM BundleFusion Real-time 3D Reconstruction Scalable scene representation Global alignment and re-localization TOG 17 [Dai et al.]: BundleFusion Real-time
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image. Supplementary Material
 Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
Supplementary: Cross-modal Deep Variational Hand Pose Estimation
 Supplementary: Cross-modal Deep Variational Hand Pose Estimation Adrian Spurr, Jie Song, Seonwook Park, Otmar Hilliges ETH Zurich {spurra,jsong,spark,otmarh}@inf.ethz.ch Encoder/Decoder Linear(512) Table
Supplementary: Cross-modal Deep Variational Hand Pose Estimation Adrian Spurr, Jie Song, Seonwook Park, Otmar Hilliges ETH Zurich {spurra,jsong,spark,otmarh}@inf.ethz.ch Encoder/Decoder Linear(512) Table
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
arxiv: v2 [cs.cv] 14 May 2018
![arxiv: v2 [cs.cv] 14 May 2018](/thumbs/79/79495201.jpg "arxiv: v2 [cs.cv] 14 May 2018") ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Real-Time Depth Estimation from 2D Images
 Real-Time Depth Estimation from 2D Images Jack Zhu Ralph Ma jackzhu@stanford.edu ralphma@stanford.edu. Abstract ages. We explore the differences in training on an untrained network, and on a network pre-trained
Real-Time Depth Estimation from 2D Images Jack Zhu Ralph Ma jackzhu@stanford.edu ralphma@stanford.edu. Abstract ages. We explore the differences in training on an untrained network, and on a network pre-trained
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Semantic 3D Reconstruction of Heads Supplementary Material
 Semantic 3D Reconstruction of Heads Supplementary Material Fabio Maninchedda1, Christian Ha ne2,?, Bastien Jacquet3,?, Amae l Delaunoy?, Marc Pollefeys1,4 1 ETH Zurich 2 UC Berkeley 3 Kitware SAS 4 Microsoft
Semantic 3D Reconstruction of Heads Supplementary Material Fabio Maninchedda1, Christian Ha ne2,?, Bastien Jacquet3,?, Amae l Delaunoy?, Marc Pollefeys1,4 1 ETH Zurich 2 UC Berkeley 3 Kitware SAS 4 Microsoft
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Learning visual odometry with a convolutional network
 Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Translation Symmetry Detection: A Repetitive Pattern Analysis Approach
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
An Empirical Study of Generative Adversarial Networks for Computer Vision Tasks
 An Empirical Study of Generative Adversarial Networks for Computer Vision Tasks Report for Undergraduate Project - CS396A Vinayak Tantia (Roll No: 14805) Guide: Prof Gaurav Sharma CSE, IIT Kanpur, India
An Empirical Study of Generative Adversarial Networks for Computer Vision Tasks Report for Undergraduate Project - CS396A Vinayak Tantia (Roll No: 14805) Guide: Prof Gaurav Sharma CSE, IIT Kanpur, India
Fully Convolutional Network for Depth Estimation and Semantic Segmentation
 Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping
 74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks
 Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks Nico Höft, Hannes Schulz, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Institut für Informatik VI,
Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks Nico Höft, Hannes Schulz, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Institut für Informatik VI,
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform. Xintao Wang Ke Yu Chao Dong Chen Change Loy
 Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform Xintao Wang Ke Yu Chao Dong Chen Change Loy Problem enlarge 4 times Low-resolution image High-resolution image Previous
Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform Xintao Wang Ke Yu Chao Dong Chen Change Loy Problem enlarge 4 times Low-resolution image High-resolution image Previous
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material
 SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material Ayan Sinha MIT Asim Unmesh IIT Kanpur Qixing Huang UT Austin Karthik Ramani Purdue sinhayan@mit.edu a.unmesh@gmail.com
SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material Ayan Sinha MIT Asim Unmesh IIT Kanpur Qixing Huang UT Austin Karthik Ramani Purdue sinhayan@mit.edu a.unmesh@gmail.com
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Bilevel Sparse Coding
 Adobe Research 345 Park Ave, San Jose, CA Mar 15, 2013 Outline 1 2 The learning model The learning algorithm 3 4 Sparse Modeling Many types of sensory data, e.g., images and audio, are in high-dimensional
Adobe Research 345 Park Ave, San Jose, CA Mar 15, 2013 Outline 1 2 The learning model The learning algorithm 3 4 Sparse Modeling Many types of sensory data, e.g., images and audio, are in high-dimensional
Depth Estimation from a Single Image Using a Deep Neural Network Milestone Report
 Figure 1: The architecture of the convolutional network. Input: a single view image; Output: a depth map. 3 Related Work In [4] they used depth maps of indoor scenes produced by a Microsoft Kinect to successfully
Figure 1: The architecture of the convolutional network. Input: a single view image; Output: a depth map. 3 Related Work In [4] they used depth maps of indoor scenes produced by a Microsoft Kinect to successfully
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Mask R-CNN. Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018
 Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
3D Densely Convolutional Networks for Volumetric Segmentation. Toan Duc Bui, Jitae Shin, and Taesup Moon
 3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
Static Scene Reconstruction
 GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
Visualization 2D-to-3D Photo Rendering for 3D Displays
 Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
Adversarial Semantic Scene Completion from a Single Depth Image
 Adversarial Semantic Scene Completion from a Single Depth Image Yida Wang, David Joseph Tan, Nassir Navab, Federico Tombari Technische Universität München Boltzmannstraße 3, 85748 Garching bei München
Adversarial Semantic Scene Completion from a Single Depth Image Yida Wang, David Joseph Tan, Nassir Navab, Federico Tombari Technische Universität München Boltzmannstraße 3, 85748 Garching bei München
Deep Learning-driven Depth from Defocus via Active Multispectral Quasi-random Projections with Complex Subpatterns
 Deep Learning-driven Depth from Defocus via Active Multispectral Quasi-random Projections with Complex Subpatterns Avery Ma avery.ma@uwaterloo.ca Alexander Wong a28wong@uwaterloo.ca David A Clausi dclausi@uwaterloo.ca
Deep Learning-driven Depth from Defocus via Active Multispectral Quasi-random Projections with Complex Subpatterns Avery Ma avery.ma@uwaterloo.ca Alexander Wong a28wong@uwaterloo.ca David A Clausi dclausi@uwaterloo.ca
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material
 Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Light Field Occlusion Removal
 Light Field Occlusion Removal Shannon Kao Stanford University kaos@stanford.edu Figure 1: Occlusion removal pipeline. The input image (left) is part of a focal stack representing a light field. Each image
Light Field Occlusion Removal Shannon Kao Stanford University kaos@stanford.edu Figure 1: Occlusion removal pipeline. The input image (left) is part of a focal stack representing a light field. Each image
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
Multiview Image Compression using Algebraic Constraints
 Multiview Image Compression using Algebraic Constraints Chaitanya Kamisetty and C. V. Jawahar Centre for Visual Information Technology, International Institute of Information Technology, Hyderabad, INDIA-500019
Multiview Image Compression using Algebraic Constraints Chaitanya Kamisetty and C. V. Jawahar Centre for Visual Information Technology, International Institute of Information Technology, Hyderabad, INDIA-500019
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet.
 Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Supplementary Material : Partial Sum Minimization of Singular Values in RPCA for Low-Level Vision
 Supplementary Material : Partial Sum Minimization of Singular Values in RPCA for Low-Level Vision Due to space limitation in the main paper, we present additional experimental results in this supplementary
Supplementary Material : Partial Sum Minimization of Singular Values in RPCA for Low-Level Vision Due to space limitation in the main paper, we present additional experimental results in this supplementary
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Spontaneously Emerging Object Part Segmentation
 Spontaneously Emerging Object Part Segmentation Yijie Wang Machine Learning Department Carnegie Mellon University yijiewang@cmu.edu Katerina Fragkiadaki Machine Learning Department Carnegie Mellon University
Spontaneously Emerging Object Part Segmentation Yijie Wang Machine Learning Department Carnegie Mellon University yijiewang@cmu.edu Katerina Fragkiadaki Machine Learning Department Carnegie Mellon University
Kinect Shadow Detection and Classification
 2013 IEEE International Conference on Computer Vision Workshops Kinect Shadow Detection and Classification Teng Deng 1, Hui Li 1, Jianfei Cai 1, Tat-Jen Cham 1, Henry Fuchs 2 1 Nanyang Technological University,
2013 IEEE International Conference on Computer Vision Workshops Kinect Shadow Detection and Classification Teng Deng 1, Hui Li 1, Jianfei Cai 1, Tat-Jen Cham 1, Henry Fuchs 2 1 Nanyang Technological University,
Support surfaces prediction for indoor scene understanding
 2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
Correcting User Guided Image Segmentation
 Correcting User Guided Image Segmentation Garrett Bernstein (gsb29) Karen Ho (ksh33) Advanced Machine Learning: CS 6780 Abstract We tackle the problem of segmenting an image into planes given user input.
Correcting User Guided Image Segmentation Garrett Bernstein (gsb29) Karen Ho (ksh33) Advanced Machine Learning: CS 6780 Abstract We tackle the problem of segmenting an image into planes given user input.
Joint Gap Detection and Inpainting of Line Drawings
 Joint Gap Detection and Inpainting of Line Drawings Kazuma Sasaki Satoshi Iizuka Edgar Simo-Serra Hiroshi Ishikawa Department of Computer Science and Engineering Waseda University, Tokyo, Japan milky_kaid.lc@ruri.waseda.jp
Joint Gap Detection and Inpainting of Line Drawings Kazuma Sasaki Satoshi Iizuka Edgar Simo-Serra Hiroshi Ishikawa Department of Computer Science and Engineering Waseda University, Tokyo, Japan milky_kaid.lc@ruri.waseda.jp
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Point Cloud Completion of Foot Shape from a Single Depth Map for Fit Matching using Deep Learning View Synthesis
 Point Cloud Completion of Foot Shape from a Single Depth Map for Fit Matching using Deep Learning View Synthesis Nolan Lunscher University of Waterloo 200 University Ave W. nlunscher@uwaterloo.ca John
Point Cloud Completion of Foot Shape from a Single Depth Map for Fit Matching using Deep Learning View Synthesis Nolan Lunscher University of Waterloo 200 University Ave W. nlunscher@uwaterloo.ca John
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging
 Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Photo-realistic Renderings for Machines Seong-heum Kim
 Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
arxiv: v1 [cs.cv] 30 Sep 2018
![arxiv: v1 [cs.cv] 30 Sep 2018](/thumbs/89/99613806.jpg "arxiv: v1 [cs.cv] 30 Sep 2018") 3D-PSRNet: Part Segmented 3D Point Cloud Reconstruction From a Single Image Priyanka Mandikal, Navaneet K L, and R. Venkatesh Babu arxiv:1810.00461v1 [cs.cv] 30 Sep 2018 Indian Institute of Science, Bangalore,
3D-PSRNet: Part Segmented 3D Point Cloud Reconstruction From a Single Image Priyanka Mandikal, Navaneet K L, and R. Venkatesh Babu arxiv:1810.00461v1 [cs.cv] 30 Sep 2018 Indian Institute of Science, Bangalore,
Shape Preserving RGB-D Depth Map Restoration
 Shape Preserving RGB-D Depth Map Restoration Wei Liu 1, Haoyang Xue 1, Yun Gu 1, Qiang Wu 2, Jie Yang 1, and Nikola Kasabov 3 1 The Key Laboratory of Ministry of Education for System Control and Information
Shape Preserving RGB-D Depth Map Restoration Wei Liu 1, Haoyang Xue 1, Yun Gu 1, Qiang Wu 2, Jie Yang 1, and Nikola Kasabov 3 1 The Key Laboratory of Ministry of Education for System Control and Information
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Image Inpainting by Hyperbolic Selection of Pixels for Two Dimensional Bicubic Interpolations
 Image Inpainting by Hyperbolic Selection of Pixels for Two Dimensional Bicubic Interpolations Mehran Motmaen motmaen73@gmail.com Majid Mohrekesh mmohrekesh@yahoo.com Mojtaba Akbari mojtaba.akbari@ec.iut.ac.ir
Image Inpainting by Hyperbolic Selection of Pixels for Two Dimensional Bicubic Interpolations Mehran Motmaen motmaen73@gmail.com Majid Mohrekesh mmohrekesh@yahoo.com Mojtaba Akbari mojtaba.akbari@ec.iut.ac.ir
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
DeMoN: Depth and Motion Network for Learning Monocular Stereo Supplementary Material
 Learning rate : Depth and Motion Network for Learning Monocular Stereo Supplementary Material A. Network Architecture Details Our network is a chain of encoder-decoder networks. Figures 15 and 16 explain
Learning rate : Depth and Motion Network for Learning Monocular Stereo Supplementary Material A. Network Architecture Details Our network is a chain of encoder-decoder networks. Figures 15 and 16 explain
IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues
 2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
3D Semantic Parsing of Large-Scale Indoor Spaces Supplementary Material
 3D Semantic Parsing of Large-Scale Indoor Spaces Supplementar Material Iro Armeni 1 Ozan Sener 1,2 Amir R. Zamir 1 Helen Jiang 1 Ioannis Brilakis 3 Martin Fischer 1 Silvio Savarese 1 1 Stanford Universit
3D Semantic Parsing of Large-Scale Indoor Spaces Supplementar Material Iro Armeni 1 Ozan Sener 1,2 Amir R. Zamir 1 Helen Jiang 1 Ioannis Brilakis 3 Martin Fischer 1 Silvio Savarese 1 1 Stanford Universit
LEARNING BOUNDARIES WITH COLOR AND DEPTH. Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen
 LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA
 TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
LSTM and its variants for visual recognition. Xiaodan Liang Sun Yat-sen University
 LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
Example-Based Image Super-Resolution Techniques
 Example-Based Image Super-Resolution Techniques Mark Sabini msabini & Gili Rusak gili December 17, 2016 1 Introduction With the current surge in popularity of imagebased applications, improving content
Example-Based Image Super-Resolution Techniques Mark Sabini msabini & Gili Rusak gili December 17, 2016 1 Introduction With the current surge in popularity of imagebased applications, improving content
Segmentation Based Stereo. Michael Bleyer LVA Stereo Vision
 Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
An Overview of Matchmoving using Structure from Motion Methods
 An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Computing the relations among three views based on artificial neural network
 Computing the relations among three views based on artificial neural network Ying Kin Yu Kin Hong Wong Siu Hang Or Department of Computer Science and Engineering The Chinese University of Hong Kong E-mail:
Computing the relations among three views based on artificial neural network Ying Kin Yu Kin Hong Wong Siu Hang Or Department of Computer Science and Engineering The Chinese University of Hong Kong E-mail:
Generating Object Candidates from RGB-D Images and Point Clouds
 Generating Object Candidates from RGB-D Images and Point Clouds Helge Wrede 11.05.2017 1 / 36 Outline Introduction Methods Overview The Data RGB-D Images Point Clouds Microsoft Kinect Generating Object
Generating Object Candidates from RGB-D Images and Point Clouds Helge Wrede 11.05.2017 1 / 36 Outline Introduction Methods Overview The Data RGB-D Images Point Clouds Microsoft Kinect Generating Object
Level lines based disocclusion
 Level lines based disocclusion Simon Masnou Jean-Michel Morel CEREMADE CMLA Université Paris-IX Dauphine Ecole Normale Supérieure de Cachan 75775 Paris Cedex 16, France 94235 Cachan Cedex, France Abstract
Level lines based disocclusion Simon Masnou Jean-Michel Morel CEREMADE CMLA Université Paris-IX Dauphine Ecole Normale Supérieure de Cachan 75775 Paris Cedex 16, France 94235 Cachan Cedex, France Abstract
A Survey of Light Source Detection Methods
 A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
arxiv: v1 [cs.cv] 16 Nov 2015
![arxiv: v1 [cs.cv] 16 Nov 2015](/thumbs/85/92600288.jpg "arxiv: v1 [cs.cv] 16 Nov 2015") Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
arxiv: v1 [cs.cv] 2 May 2016
![arxiv: v1 [cs.cv] 2 May 2016](/thumbs/86/93079061.jpg "arxiv: v1 [cs.cv] 2 May 2016") 16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
ASCII Art Synthesis with Convolutional Networks
 ASCII Art Synthesis with Convolutional Networks Osamu Akiyama Faculty of Medicine, Osaka University oakiyama1986@gmail.com 1 Introduction ASCII art is a type of graphic art that presents a picture with
ASCII Art Synthesis with Convolutional Networks Osamu Akiyama Faculty of Medicine, Osaka University oakiyama1986@gmail.com 1 Introduction ASCII art is a type of graphic art that presents a picture with
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation
 AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
DOMAIN-ADAPTIVE GENERATIVE ADVERSARIAL NETWORKS FOR SKETCH-TO-PHOTO INVERSION
 DOMAIN-ADAPTIVE GENERATIVE ADVERSARIAL NETWORKS FOR SKETCH-TO-PHOTO INVERSION Yen-Cheng Liu 1, Wei-Chen Chiu 2, Sheng-De Wang 1, and Yu-Chiang Frank Wang 1 1 Graduate Institute of Electrical Engineering,
DOMAIN-ADAPTIVE GENERATIVE ADVERSARIAL NETWORKS FOR SKETCH-TO-PHOTO INVERSION Yen-Cheng Liu 1, Wei-Chen Chiu 2, Sheng-De Wang 1, and Yu-Chiang Frank Wang 1 1 Graduate Institute of Electrical Engineering,
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Light Field Super Resolution with Convolutional Neural Networks
 Light Field Super Resolution with Convolutional Neural Networks by Andrew Hou A Thesis submitted in partial fulfillment of the requirements for Honors in the Department of Applied Mathematics and Computer
Light Field Super Resolution with Convolutional Neural Networks by Andrew Hou A Thesis submitted in partial fulfillment of the requirements for Honors in the Department of Applied Mathematics and Computer