DeMoN: Depth and Motion Network for Learning Monocular Stereo Supplementary Material
|
|
|
- Ami Davis
- 5 years ago
- Views:
Transcription
1 Learning rate : Depth and Motion Network for Learning Monocular Stereo Supplementary Material A. Network Architecture Details Our network is a chain of encoder-decoder networks. Figures 15 and 16 explain the details of the two encoderdecoders used in the bootstrap and iterative net part. Fig. 17 gives implementation details for the refinement net. The encoder-decoders for the bootstrap and iterative net use additional inputs which come from previous predictions. Some of these inputs, like warped images or depth from optical flow, need to be generated with special layers, which we describe here. Warped second image We warp the second image using the predicted or generated optical flow field. We compute all values with bilinear interpolation and fill values that fall outside the image boundaries with zeros. After warping with ground truth optical flow, the second image should look like the first image with the exception of occlusion regions. Comparing first image and warped image allows to assess the quality of the optical flow. Flow from depth and motion We generate an optical flow estimate based on a depth and camera motion estimate for the first encoder-decoder of the iterative net. This optical flow can be used as an initial estimate, which can be further improved by the iterative net. Depth from optical flow and motion In contrast to generating optical flow from a depth map and camera motion, computing depth from optical flow and camera motion is not straightforward. To compute the depth value of a pixel, we first project the corresponding point in the second image to the epipolar line and then triangulate the 3D point to retrieve the depth. This generated depth map provides an estimate which combines optical flow and camera motion. Note that using the estimated camera motion here ensures that the depth values of the estimate are correctly scaled according to the camera motion. In case of ground truth optical flow and camera motion this yields the true depth map. # the 1st encoder-decoder in bootstrap net the 2nd encoder-decoder in bootstrap net the 1st encoder-decoder in iterative net the 2nd encoder-decoder in iterative net refinement net Iteration [*k] Figure 1. Learning rate schedule. During the training of each encoder-decoder a multistep learning rate is applied. At each step the learning rate is reduced by20%. B. Training Schedule We train our model from scratch for 3200k iterations in total. Fig. 1 shows our learning rate schedule. From 0 to 1000k iterations we sequentially train the four encoderdecoders, then the two encoder-decoders of the iterative net are jointly trained to iteration 2600k, finally we train the refinement net for another 600k iterations. This training schedule can be further optimized. We normalize all point-wise losses with the number of pixels. The loss weights for flow, flow confidence, depth and normals are 1000, 1000, 300 and 100 respectively. The loss weight for the scale invariant gradient loss on flow is For depth we weight the scale invariant gradient loss with 1500, because we consider sharp edges and smooth surfaces more important for depth prediction. The translation and rotation losses are weighted with a factor of15 and 160 respectively to balance their importance with respect to the other losses. C. Datasets Our training procedure requires ground truth camera poses and ground truth depth for the first image. The datasets we use for training can be divided in two groups: synthetic and real datasets. Real datasets provide natural images, but do only provide sparse pseudo ground truth due to measurement and reconstruction errors. Synthetic datasets provide perfect ground truth but often fea- 1


2 ture unrealistic images. Since no single dataset is perfect, we train on a set of five datasets with different properties. Tab. 1 provides an overview of the properties of the datasets. Figures 11, 12, 13, 14 and 3 show examples from the datasets we used. SUN3D The dataset from [11] is a set of video sequences with camera poses and depth maps. Camera poses and depth maps are inaccurate because they have been created via a reconstruction process. The raw sensor data for this dataset was recorded with a structured light depth sensor which reports absolute depth values, thus the reconstruction scale for this dataset is known. The dataset features indoor scenes of offices, apartments, hotel rooms and university buildings. To sample image pairs suitable for training, we apply a simple filtering process. To avoid image pairs with large pose or depth error, we filter out pairs with a large photoconsistency error. We also filter out image pairs with less than 50% of the pixels from the first image visible in the second image. Further we discard images with a baseline smaller than 5cm. We have split the datasets into training and testing scenes. The training set contains 253 scenes and the test set contains 16 scenes. For training we sample a total of image pairs from all image sequences. For testing we generate a diverse set of 80 image pairs which minimizes overlap within image sequences. This way we obtain a small test set with large diversity. RGB-D SLAM The dataset from [9] is a set of video sequences with camera poses and depth maps. Camera poses are accurate since they come from an external motion tracking system. The scale of the reconstructed camera poses is known. Depth maps have been recorded with a structured light sensor and are therefore affected by measurement noise and limited to a fixed depth range. Due to the use of an external tracking system, the data is restricted to indoor scenes in a lab environment. We use the same sampling process as for SUN3D. The training set contains image pairs, while the test set features 80 diverse image pairs. MVS In contrast to SUN3D and RGB-D SLAM, MVS is a dataset with outdoor images. We use the Citywall and Achteckturm datasets provided with [4] and the Breisach dataset from [10] for training. We compute depth maps and camera poses with the Multiview Reconstruction Environment by [4]. For testing we use datasets provided with the COLMAP software from Schönberger et al. [7, 8], which are called Person-Hall, Graham-Hall, and South-Building. These Figure 2. Annotation volumes for the Blendswap dataset. Left: We annotate each scene with volumes that describe valid camera positions (white box) and valid positions for the look at target (orange box). Right: Image from a randomly sampled camera and target. datasets show the exterior of the eponymous buildings. Further, we have recorded a small scene which shows a sculpture and can be seen in the third row of Fig. 13. We use the COLMAP software for computing the depth and camera poses for these scenes. Due to the scale ambiguity in the reconstruction process, the absolute scale is unknown. The datasets are small and not very diverse. Again we use the same image pair sampling strategy as for the previous datasets. We sample image pairs for training and 66 image pairs for testing. Scenes11 Scenes11 is a synthetic dataset with randomly generated geometry and objects from ShapeNet [3]. All scenes have a ground plane which makes the scenes look like outdoor scenes. We use the open source software Blender [2] for rendering. Due to the synthetic nature of the dataset, the accuracy of the camera poses and depth maps is perfect. Disadvantages are the artificial look and a simplistic model of the camera movement. We sample camera parameters from Gaussian and uniform distributions, which bears the risk of learning the underlying model by heart when training only on this data. The absolute scale for this dataset is meaningless since the scale of the objects is arbitrary and inconsistent. We generate image pairs from unique scenes for training and 128 image pairs from 128 unique scenes for testing. Blendswap The blendswap dataset is an artificial dataset generated with 150 scenes from blendswap.com. Scenes range from cartoon-like to photorealistic. Blendswap contains some outdoor scenes, but a large part of the scenes shows interiors. We annotated each of the 150 scenes with a camera volume, which marks free space that can be used for camera placement, and a look at volume for placing target points defining the







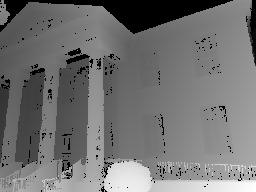
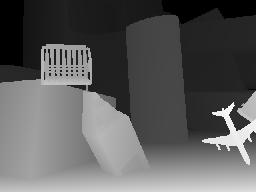
![To evaluate this, we reconstructed seven self-recorded scenes using COLMAP [7, 8], and generated 16 views of these scenes with](/docs-images/89/99377883/images/3-8.jpg "corresponding depth maps. Examples are shown in Fig. 4.")


 is computed to minimize the mean logarithmic difference between ground truth and prediction. D.")




3 Figure 3. Images and the corresponding depth maps from the Blendswap dataset. Blendswap contains 150 distinct scenes, with a large variety of different styles and settings. Figure 4. Samples of the seven scenes used for the generalization experiment. camera viewing direction. We sample camera positions and targets uniformly over the annotated volumes. Fig. 2 shows an example of an annotated scene and an automatically generated image. When sampling a camera pair we use the same target point but add individual uniform noise to its position. The noise level depends on the distance of each camera to this target point. We sample image pairs from the 150 annotated scenes for training. Fig. 3 shows images from this dataset and the corresponding ground truth depth maps. The generated data set contains a diverse set of scenes with many realistic images and actual ground truth data, and remedies the main disadvantages of Scenes11. However, adding new scenes to this dataset requires manual annotation, which is a time-consuming process. Due to the small number of scenes we only use this data for training. We plan to gradually extend this dataset in the future with more scenes. Generalization test data In Section of the main paper, we compare the generalization capabilities of and other learned approaches. To evaluate this, we reconstructed seven self-recorded scenes using COLMAP [7, 8], and generated 16 views of these scenes with corresponding depth maps. Examples are shown in Fig. 4. Content of the scenes is very different from the data has been trained on: Close-ups of unique objects such as a miniature bridge, figurine, and ship, as well as a person. We also include some outdoor scenes containing different architecture as well as 90-degree rotated images and a unique sculpture. Scale normalization: To compensate for the inherent scale ambiguity of our reconstruction, we compute all errors in Tab. 3 of the main paper with optimally scaled depth predictions. The scale s log = exp( 1 n logẑ logz) is computed to minimize the mean logarithmic difference between ground truth and prediction. D. Experiments with Ground Truth iterates between estimating optical flow and estimating depth and camera motion. This is supposed to gradually refine the depth and motion estimates. The ar- chitecture is justified by a strong mathematical relation between optical flow, depth and camera motion. Optical flow can be computed analytically from depth and motion, and vice-versa, depth and motion can be computed from optical flow in non-degenerate cases. But can a convolutional network fully exploit this mathematical relation? Given perfect optical flow, can it indeed estimate depth and camera motion very accurately? To answer these questions we trained networks to estimate depth and motion from ground truth optical flow, and, other way round, to estimate optical flow given ground truth depth and motion. Results on the SUN3D dataset are reported in Table 2. In all cases performance dramatically improves when the ground truth input is provided, compared to only taking an image pair as input. The network can use an accurate optical flow estimate to refine the depth and motion estimates, and vice-versa. At the same time, this experiment provides an upper bound on the performance we can expect from the current architecture. s performance is still far below this bound, meaning that the difficulties come from estimating optical flow, depth and motion from images, and not from converting between these modalities. Ground truth Depth Motion Flow flow dep+mot L1-inv sc-inv L1-rel rot tran EPE yes no yes no no no no yes no no Table 2. The effect of providing the ground truth optical flow (flow) or ground truth depth and motion (dep+mot) to the network. A network can be trained to produce very accurate depth and motion estimates given the ground truth optical flow, and vice-versa, a network can estimate the optical flow very well given the ground truth depth and motion.
 (yes) 23.1 17.1 20.1 13.6 Table 1. Training dataset properties.")
4 Dataset Perfect GT Photorealistic Outdoor scenes Rot. avg Rot. stddev Tri. angle avg Tri. angle stddev SUN3D no yes no RGBD no yes no Scenes11 yes no (yes) MVS no yes yes Blendswap yes (yes) (yes) Table 1. Training dataset properties. Perfect GT: Perfect ground truth camera poses and depth maps are only available for the synthetic datasets Scenes11 and Blendswap. Photorealistic: The synthetic Blendswap dataset features some photorealistic scenes, while Scenes11 looks entirely artificial. The other datasets use real images. Outdoor scenes: MVS is the only outdoor dataset with real images. Images from Scenes11 show wide open spaces, similar to outdoor data. Blendswap contains some outdoor scenes, but is biased towards indoor environments. Rotation and Triangulation angle: Camera rotation and triangulation angles are given in degree. The rotation and triangulation angle is similar for SUN3D and RGB-D SLAM. Both datasets are indoor video sequences. MVS and Blendswap also show similar characteristics, which means that the sampling procedure for Blendswap mimics the camera poses of a real outdoor dataset. Iteration GT Iter 0 Iter 1 Iter 2 Iter 3 Figure 5. Effect of the iterative net on depth values. Depth Motion Flow L1-inv sc-inv L1-rel δ<1.25 δ< δ< rot tran EPE Table 3. The effect of iterative refinement of the predictions. The performance is computed on the SUN3D dataset. The results do not significantly improve beyond 3 iterations. The threshold metric is defined as the percentage of pixel z i so that max( z i ẑ i, ẑi z i ) = δ < thr. E. Effect of Iterative Refinement The quantitative evaluation of iterative refinement is shown in Table 3. Both depth and motion accuracy significantly improve up to iteration3. Fig. 5 shows the effect on one sample of the MVS dataset. The iterative net improves the depth values, which is visible as a reduced distortion of the building in the point cloud. F. Error Distributions We show the per-pixel error distributions and means for Base-Oracle and on the MVS and SUN3D dataset in Fig. 6. Note that the average values in Tab. 2 in the main paper have been computed over test samples and here we average over pixels. The distributions on the highly textured MVS show that Base-Oracle produces many very accurate depth estimates, while the distribution of errors is more spread for. This is an effect of Base-Oracle using higher resolution images ( ) than ( ). Base-Oracle also uses the motion ground truth, which again helps finding the correct depth. For SUN3D distributions are more similar and the resolution adavantage of Base-Oracle is less pronounced. This can be explained by the more homogeneous image regions, which make matching difficult on this dataset. Base-Oracle suffers significantly more from outliers than. Depending on the task higher depth accuracy can be more important than less outliers. It also shows the importance of lifting restrictions on the camera intrinsics and supporting higher resolutions in future works. We show the distributon of the motion errors for Base- FF, Base-Mat-F and in Fig. 7. Base-FF uses the FlowFields algorithm for correspondence search [1] and our baseline implementation using the noramlized 8-point algorithm [5] and RANSAC to compute the relative camera motion. Base-Mat-F uses the optical flow of predicted after three iterations for correspondences and uses the Matlab implementations of [6] and RANSAC to estimate the camera motion. The distribution is similar for Base-FF and on the MVS dataset with Base-FF being slightly more accurate for rotation and being more accurate for translation. Base-Mat-F is less accurate than both comparisons. On SUN3D can estimate the motion more accurately than the comparisons. Base-FF produces some outliers for rotation while and Base-Mat-F have almost no outliers. Base-FF also fails to estimate accurate translation directions on SUN3D. We show some failure cases in Fig. 8. On SUN3D baselines are usually smaller than on MVS.
 Base-Oracle: mean 0.103 (0.064) : mean 0.045 (0.037) : mean 0.272 (0.")
 Base-Oracle: mean 0.218 (0.174) : mean 0.019 (0.018) : mean 0.172 (0.")
 : tran 4.804, rot 1.237 Base-FF: tran 56.948, rot 2.087 0.30 0.")

 and the scenes have many homogeneous regions like (b) and (c). 0.35 0.30 0.")

5 L1-inv error distribution on MVS 35 L1-rel error distribution on MVS 140 Base-Oracle 30 Base-Oracle L1-inv Base-Oracle: mean (0.013) Base-Oracle: mean (0.064) : mean (0.037) : mean (0.177) L1-inv error distribution on SUN3D Base-Oracle 7 6 L1-rel L1-rel error distribution on SUN3D Base-Oracle (a) : tran , rot Base-FF: tran , rot L1-inv Base-Oracle: mean (0.018) Base-Oracle: mean (0.174) : mean (0.018) : mean (0.169) Figure 6. Error histograms and mean for per pixel depth errors (L1-inv and L1-rel) on MVS (top) and SUN3D (bottom). The last bin includes samples with errors above of the shown range. The second mean value in parenthesis excludes the last bin of the respective histogram. L1-rel (b) : tran 4.804, rot Base-FF: tran , rot Rotation error distribution on MVS Base-Mat-F Base-FF Translation error distribution on MVS Base-Mat-F Base-FF (c) : tran , rot Base-FF: tran , rot rotation error [deg] translation error [deg] Base-FF: mean Base-FF: mean Base-Mat-F: mean Base-Mat-F: mean : mean : mean Figure 8. Comparison of the motion error (in degrees) in some special cases. The classic method Base-FF fails when the baseline of the camera motion is small shown in (a) and the scenes have many homogeneous regions like (b) and (c) Rotation error distribution on SUN3D Base-Mat-F Base-FF Translation error distribution on SUN3D Base-Mat-F Base-FF point clouds, which we show in Fig rotation error [deg] translation error [deg] Base-FF: mean Base-FF: mean Base-Mat-F: mean Base-Mat-F: mean : mean : mean Figure 7. Error distributions for rotation and translation on MVS (top) and SUN3D (bottom). The translation error is given as angle because the length of the translation is 1 by definition. The last bin includes samples with errors above of the shown range. G. Qualitative Depth Estimation Results We show more qualitative results of depth estimation on the test sets of SUN3D, RGB-D SLAM, MVS, Scenes11 and NYUv2 in Fig. 11 to Fig. 10 respectively. Our method presents smooth depth estimations while preserving sharp edges. This advantage can be observed more clearly by the
































6 Image Eigen MVS NYUv2 NYUv2 GT Figure 9. Qualitative point clouds comparison on NYUv2 and MVS. Image1 Image2 GT Liu-Indoor Eigen-VGG Figure 10. Qualitative depth prediction comparison on NYUv2. The Base-Oracle prediction is not available because there is no motion ground truth. Our method fails to predict the upper bodies of the persons in the fourth example because the persons move between the two frames.
























































7 Image1 Image2 GT Base-O Liu-Indoor Eigen-VGG Figure 11. Qualitative depth prediction comparison on SUN3D. The Base-Oracle performs badly due to inaccurate motion ground truth. Eigen-VGG, which was trained on NYUv2, works well for many images. SUN3D is similar to the NYUv2 dataset shown in Fig. 10. Image1 Image2 GT Base-O Liu-Indoor Eigen-VGG Figure 12. Qualitative depth prediction comparison on RGB-D SLAM. Our method can deal with very thin objects (third row).
























































8 Image1 Image2 GT Base-O Liu-Outdoor Eigen-VGG Figure 13. Qualitative depth prediction comparison on MVS. The single image methods Liu-Outdoor and Eigen-VGG do not generalize well to new datasets. The depth maps show coarse outliers caused by hallucinating wrong depth values at object contours like the street sign in the third row or the windows in the last row. The Base-Oracle method performs well on this data. Most outliers fall into image regions not visible in the second image. Image1 Image2 GT Base-O Liu-Outdoor Eigen-VGG Figure 14. Qualitative depth prediction comparison on Scenes11. Base-Oracle and give the best results on this dataset.
9 previous network inputs previous motion: r, t flow from depth & motion depth + normals 4 x 64 x 48 warped 2nd image 1 x 64 x 48 3 x 64 x 48 kernel [3x1] stride [1,1] 32 x 64 x 48 image pair 6 x 256 x 192 kernel [9x1] stride [2,1] kernel [1x9] stride [1,2] 32 x 128 x 96 kernel [7x1] stride [2,1] kernel [1x7] stride [1,2] 64 x 64 x 48 kernel [3x1] stride [1,1] 64 x 64 x 48 kernel [5x1] stride [2,1] kernel [1x5] stride [1,2] 128 x 32 x 24 kernel [3x1] stride [1,1] 128 x 32 x 24 kernel [5x1] stride [2,1] kernel [1x5] stride [1,2] 256 x 16 x 12 kernel [3x1] stride [1,1] 256 x 16 x 12 kernel [3x1] stride [2,1] kernel [1x3] stride [1,2] 512 x 8 x 6 kernel [3x1] stride [1,1] 512 x 8 x 6 direct connections kernel [3x3] stride [1,1] Upconv + ReLU kernel [4x4] stride [2,2] first prediction 24 x 8 x 6 Conv kernel [3x3] stride [1,1] 2 x 8 x 6 2 x 8 x 6 optical flow confidence Upconv + ReLU 516 x 16 x 12 kernel [4x4] stride [2,2] 256 x 32 x 24 Upconv + ReLU kernel [4x4] stride [2,2] Upconv kernel [4x4] stride [2,2] 4 x 16 x x 64 x 48 kernel [3x3] stride [1,1] second prediction 24 x 64 x 48 Conv kernel [3x3] stride [1,1] 2 x 64 x 48 2 x 64 x 48 optical flow confidence 2x() Conv Fully Connected Upconv + ReLU Upconv Figure 15. Encoder-decoder architecture for predicting optical flow. The depicted network is used in the bootstrap net and the iterative net part. Inputs with gray font (depth and normals, flow from depth & motion, warped 2nd image) are only available for the iterative net. The encoder-decoder predicts optical flow and its confidence at two different resolutions. The first prediction is directly appended to the end of the encoder and its output resolution is 8 6. We also apply our losses to this small prediction. We also feed this prediction back into the decoder part after upsampling it with an upconvolutional layer. The second prediction is part of the decoder and predicts all outputs with a resolution of 64 48, which is four times smaller than the original image dimensions ( ). Due to this resolution difference we concatenate inputs from the previous network at the respective spatial resolution level within the encoder. We use direct connections from the encoder to the decoder, which allows the decoder to reuse features from the respective spatial resolution levels from the encoder.
10 previous network inputs previous motion: r, t depth from flow & motion optical flow + confidence 4 x 64 x 48 warped 2nd image 1 x 64 x 48 3 x 64 x 48 kernel [3x1] stride [1,1] 32 x 64 x 48 image pair 6 x 256 x 192 kernel [9x1] stride [2,1] kernel [1x9] stride [1,2] 32 x 128 x 96 kernel [7x1] stride [2,1] kernel [1x7] stride [1,2] 64 x 64 x 48 kernel [3x1] stride [1,1] 64 x 64 x 48 kernel [5x1] stride [2,1] kernel [1x5] stride [1,2] 128 x 32 x 24 kernel [3x1] stride [1,1] 128 x 32 x 24 kernel [5x1] stride [2,1] kernel [1x5] stride [1,2] 256 x 16 x 12 kernel [3x1] stride [1,1] 256 x 16 x 12 kernel [3x1] stride [2,1] kernel [1x3] stride [1,2] 512 x 8 x 6 kernel [3x1] stride [1,1] 512 x 8 x 6 direct connections Upconv + ReLU kernel [4x4] stride [2,2] 512 x 16 x 12 Upconv + ReLU kernel [4x4] stride [2,2] motion prediction kernel [3x3] stride [1,1] 128 x 8 x 6 Fully Connected 1024 Fully Connected 128 Fully Connected Upconv + ReLU 256 x 32 x 24 kernel [4x4] stride [2,2] 128 x 64 x 48 kernel [3x3] stride [1,1] 24 x 128 x 96 Conv kernel [3x3] stride [1,1] 2x() 7 1 scale Scaling 6 motion: r, t 1 x 128 x 96 3 x 128 x 96 depth normals Conv Fully Connected Upconv + ReLU Scaling Figure 16. Encoder-decoder architecture for predicting depth and camera motion. The depicted network is used in the bootstrap net and the iterative net part. Inputs with gray font (previous motion, depth from flow & motion) are only available for the iterative net. The encoder-decoder predicts the depth map, the normals and the camera motion for an image pair. Similar to the encoder-decoder shown in Fig. 15, this encoder-decoder features direct connections and integrates previous network inputs at the corresponding resolution level into the encoder. This encoder-decoder predicts a camera motion vector and depth and normal maps. While all predictions share the encoder part, the camera motion prediction uses a separate fully connected network for its prediction. The depth and normal prediction is integrated in the decoder part. The scale of the depth values and the camera motion are highly related, therefore the motion prediction part also predicts a scale factor that we use to scale the final depth prediction.
![NN upsampled depth first image depth 1 x 256 x 192 3 x 256 x 192 kernel [3x3] stride [1,1] 32 x 256 x 192 kernel [3x3] stride [2,2] 64 x 128 x 96 kernel [3x3] stride [1,1] 64 x 128 x 96 kernel [3x3]](/docs-images/89/99377883/images/11-0.jpg "stride [2,2] 128 x 64 x 48 kernel [3x3] stride [1,1] 128 x 64 x 48 Upconv + ReLU kernel [4x4] stride [2,2] 192 x 128 x 96 Upconv + ReLU kernel [4x4] stride [2,2] direct connections 96 x 256 x 192")
11 NN upsampled depth first image depth 1 x 256 x x 256 x 192 kernel [3x3] stride [1,1] 32 x 256 x 192 kernel [3x3] stride [2,2] 64 x 128 x 96 kernel [3x3] stride [1,1] 64 x 128 x 96 kernel [3x3] stride [2,2] 128 x 64 x 48 kernel [3x3] stride [1,1] 128 x 64 x 48 Upconv + ReLU kernel [4x4] stride [2,2] 192 x 128 x 96 Upconv + ReLU kernel [4x4] stride [2,2] direct connections 96 x 256 x 192 kernel [3x3] stride [1,1] 16 x 256 x 192 Conv kernel [3x3] stride [1,1] 1 x 256 x 192 refined depth Conv Upconv + ReLU Figure 17. Encoder-decoder architecture for refining the depth prediction. The refinement network is a simple encoder-decoder network with direct connection. Input to this network is the first image and the upsampled depth map with nearest neighbor interpolation. Output is the depth map with the same resolution as the input image.
12 References [1] C. Bailer, B. Taetz, and D. Stricker. Flow Fields: Dense Correspondence Fields for Highly Accurate Large Displacement Optical Flow Estimation. In IEEE International Conference on Computer Vision (ICCV), Dec [2] Blender Online Community. Blender - a 3D modelling and rendering package. Blender Foundation, Blender Institute, Amsterdam, [3] A. X. Chang, T. Funkhouser, L. Guibas, P. Hanrahan, Q. Huang, Z. Li, S. Savarese, M. Savva, S. Song, H. Su, J. Xiao, L. Yi, and F. Yu. ShapeNet: An Information-Rich 3D Model Repository. Technical Report arxiv: [cs.gr], Stanford University Princeton University Toyota Technological Institute at Chicago, [4] S. Fuhrmann, F. Langguth, and M. Goesele. Mve-a multiview reconstruction environment. In Proceedings of the Eurographics Workshop on Graphics and Cultural Heritage (GCH), volume 6, page 8, [5] R. I. Hartley. In defense of the eight-point algorithm. IEEE Transactions on Pattern Analysis and Machine Intelligence, 19(6): , June [6] D. Nister. An efficient solution to the five-point relative pose problem. IEEE Transactions on Pattern Analysis and Machine Intelligence, 26(6): , June [7] J. L. Schönberger and J.-M. Frahm. Structure-from-motion revisited. In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), , 3 [8] J. L. Schönberger, E. Zheng, M. Pollefeys, and J.-M. Frahm. Pixelwise view selection for unstructured multi-view stereo. In European Conference on Computer Vision (ECCV), , 3 [9] J. Sturm, N. Engelhard, F. Endres, W. Burgard, and D. Cremers. A benchmark for the evaluation of rgb-d slam systems. In Proc. of the International Conference on Intelligent Robot Systems (IROS), Oct [10] B. Ummenhofer and T. Brox. Global, dense multiscale reconstruction for a billion points. In IEEE International Conference on Computer Vision (ICCV), Dec [11] J. Xiao, A. Owens, and A. Torralba. SUN3D: A Database of Big Spaces Reconstructed Using SfM and Object Labels. In IEEE International Conference on Computer Vision (ICCV), pages , Dec
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
DeMoN: Depth and Motion Network for Learning Monocular Stereo
 DeMoN: Depth and Motion Network for Learning Monocular Stereo Benjamin Ummenhofer *,1 Huizhong Zhou *,1 {ummenhof, zhouh}@cs.uni-freiburg.de Jonas Uhrig 1,2 Nikolaus Mayer 1 Eddy Ilg 1 Alexey Dosovitskiy
DeMoN: Depth and Motion Network for Learning Monocular Stereo Benjamin Ummenhofer *,1 Huizhong Zhou *,1 {ummenhof, zhouh}@cs.uni-freiburg.de Jonas Uhrig 1,2 Nikolaus Mayer 1 Eddy Ilg 1 Alexey Dosovitskiy
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Supplementary: Cross-modal Deep Variational Hand Pose Estimation
 Supplementary: Cross-modal Deep Variational Hand Pose Estimation Adrian Spurr, Jie Song, Seonwook Park, Otmar Hilliges ETH Zurich {spurra,jsong,spark,otmarh}@inf.ethz.ch Encoder/Decoder Linear(512) Table
Supplementary: Cross-modal Deep Variational Hand Pose Estimation Adrian Spurr, Jie Song, Seonwook Park, Otmar Hilliges ETH Zurich {spurra,jsong,spark,otmarh}@inf.ethz.ch Encoder/Decoder Linear(512) Table
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Supplementary Material for "FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks"
 Supplementary Material for "FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks" Architecture Datasets S short S long S fine FlowNetS FlowNetC Chairs 15.58 - - Chairs - 14.60 14.28 Things3D
Supplementary Material for "FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks" Architecture Datasets S short S long S fine FlowNetS FlowNetC Chairs 15.58 - - Chairs - 14.60 14.28 Things3D
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss
 UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss AAAI 2018, New Orleans, USA Simon Meister, Junhwa Hur, and Stefan Roth Department of Computer Science, TU Darmstadt 2 Deep
UnFlow: Unsupervised Learning of Optical Flow with a Bidirectional Census Loss AAAI 2018, New Orleans, USA Simon Meister, Junhwa Hur, and Stefan Roth Department of Computer Science, TU Darmstadt 2 Deep
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/91/106305353.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
DeepMVS: Learning Multi-view Stereopsis
 DeepMVS: Learning Multi-view Stereopsis Po-Han Huang 1 Kevin Matzen 2 Johannes Kopf 2 Narendra Ahuja 1 Jia-Bin Huang 3 1 University of Illinois, Urbana-Champaign 2 Facebook 3 Virginia Tech {phuang17,n-ahuja}@illinois.edu
DeepMVS: Learning Multi-view Stereopsis Po-Han Huang 1 Kevin Matzen 2 Johannes Kopf 2 Narendra Ahuja 1 Jia-Bin Huang 3 1 University of Illinois, Urbana-Champaign 2 Facebook 3 Virginia Tech {phuang17,n-ahuja}@illinois.edu
Detecting motion by means of 2D and 3D information
 Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
3D Reconstruction of a Hopkins Landmark
 3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
An Overview of Matchmoving using Structure from Motion Methods
 An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Learning to Estimate 3D Human Pose and Shape from a Single Color Image Supplementary material
 Learning to Estimate 3D Human Pose and Shape from a Single Color Image Supplementary material Georgios Pavlakos 1, Luyang Zhu 2, Xiaowei Zhou 3, Kostas Daniilidis 1 1 University of Pennsylvania 2 Peking
Learning to Estimate 3D Human Pose and Shape from a Single Color Image Supplementary material Georgios Pavlakos 1, Luyang Zhu 2, Xiaowei Zhou 3, Kostas Daniilidis 1 1 University of Pennsylvania 2 Peking
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material
 Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Visual localization using global visual features and vanishing points
 Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
Supplementary Material for A Multi-View Stereo Benchmark with High-Resolution Images and Multi-Camera Videos
 Supplementary Material for A Multi-View Stereo Benchmark with High-Resolution Images and Multi-Camera Videos Thomas Schöps 1 Johannes L. Schönberger 1 Silvano Galliani 2 Torsten Sattler 1 Konrad Schindler
Supplementary Material for A Multi-View Stereo Benchmark with High-Resolution Images and Multi-Camera Videos Thomas Schöps 1 Johannes L. Schönberger 1 Silvano Galliani 2 Torsten Sattler 1 Konrad Schindler
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Dynamic Time Warping for Binocular Hand Tracking and Reconstruction
 Dynamic Time Warping for Binocular Hand Tracking and Reconstruction Javier Romero, Danica Kragic Ville Kyrki Antonis Argyros CAS-CVAP-CSC Dept. of Information Technology Institute of Computer Science KTH,
Dynamic Time Warping for Binocular Hand Tracking and Reconstruction Javier Romero, Danica Kragic Ville Kyrki Antonis Argyros CAS-CVAP-CSC Dept. of Information Technology Institute of Computer Science KTH,
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Towards a visual perception system for LNG pipe inspection
 Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS. Mustafa Ozan Tezcan
 MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS Mustafa Ozan Tezcan Boston University Department of Electrical and Computer Engineering 8 Saint Mary s Street Boston, MA 2215 www.bu.edu/ece Dec. 19,
MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS Mustafa Ozan Tezcan Boston University Department of Electrical and Computer Engineering 8 Saint Mary s Street Boston, MA 2215 www.bu.edu/ece Dec. 19,
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Supplemental Material: A Dataset and Evaluation Methodology for Depth Estimation on 4D Light Fields
 Supplemental Material: A Dataset and Evaluation Methodology for Depth Estimation on 4D Light Fields Katrin Honauer 1, Ole Johannsen 2, Daniel Kondermann 1, Bastian Goldluecke 2 1 HCI, Heidelberg University
Supplemental Material: A Dataset and Evaluation Methodology for Depth Estimation on 4D Light Fields Katrin Honauer 1, Ole Johannsen 2, Daniel Kondermann 1, Bastian Goldluecke 2 1 HCI, Heidelberg University
STEREO BY TWO-LEVEL DYNAMIC PROGRAMMING
 STEREO BY TWO-LEVEL DYNAMIC PROGRAMMING Yuichi Ohta Institute of Information Sciences and Electronics University of Tsukuba IBARAKI, 305, JAPAN Takeo Kanade Computer Science Department Carnegie-Mellon
STEREO BY TWO-LEVEL DYNAMIC PROGRAMMING Yuichi Ohta Institute of Information Sciences and Electronics University of Tsukuba IBARAKI, 305, JAPAN Takeo Kanade Computer Science Department Carnegie-Mellon
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation
 AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Motion Capture using Body Mounted Cameras in an Unknown Environment
 Motion Capture using Body Mounted Cameras in an Unknown Environment Nam Vo Taeyoung Kim Siddharth Choudhary 1. The Problem Motion capture has been recently used to provide much of character motion in several
Motion Capture using Body Mounted Cameras in an Unknown Environment Nam Vo Taeyoung Kim Siddharth Choudhary 1. The Problem Motion capture has been recently used to provide much of character motion in several
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri
 A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri Università degli Studi Roma TRE, Roma, Italy 2 nd Workshop on Light Fields for Computer
A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri Università degli Studi Roma TRE, Roma, Italy 2 nd Workshop on Light Fields for Computer
Local Readjustment for High-Resolution 3D Reconstruction: Supplementary Material
 Local Readjustment for High-Resolution 3D Reconstruction: Supplementary Material Siyu Zhu 1, Tian Fang 2, Jianxiong Xiao 3, and Long Quan 4 1,2,4 The Hong Kong University of Science and Technology 3 Princeton
Local Readjustment for High-Resolution 3D Reconstruction: Supplementary Material Siyu Zhu 1, Tian Fang 2, Jianxiong Xiao 3, and Long Quan 4 1,2,4 The Hong Kong University of Science and Technology 3 Princeton
Uncertainty-Driven 6D Pose Estimation of Objects and Scenes from a Single RGB Image - Supplementary Material -
 Uncertainty-Driven 6D Pose Estimation of s and Scenes from a Single RGB Image - Supplementary Material - Eric Brachmann*, Frank Michel, Alexander Krull, Michael Ying Yang, Stefan Gumhold, Carsten Rother
Uncertainty-Driven 6D Pose Estimation of s and Scenes from a Single RGB Image - Supplementary Material - Eric Brachmann*, Frank Michel, Alexander Krull, Michael Ying Yang, Stefan Gumhold, Carsten Rother
Real-Time Scene Reconstruction. Remington Gong Benjamin Harris Iuri Prilepov
 Real-Time Scene Reconstruction Remington Gong Benjamin Harris Iuri Prilepov June 10, 2010 Abstract This report discusses the implementation of a real-time system for scene reconstruction. Algorithms for
Real-Time Scene Reconstruction Remington Gong Benjamin Harris Iuri Prilepov June 10, 2010 Abstract This report discusses the implementation of a real-time system for scene reconstruction. Algorithms for
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet.
 Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Dense 3D Reconstruction from Autonomous Quadrocopters
 Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
From 3D descriptors to monocular 6D pose: what have we learned?
 ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document
 Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document Franziska Mueller 1,2 Dushyant Mehta 1,2 Oleksandr Sotnychenko 1 Srinath Sridhar 1 Dan Casas 3 Christian Theobalt
Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document Franziska Mueller 1,2 Dushyant Mehta 1,2 Oleksandr Sotnychenko 1 Srinath Sridhar 1 Dan Casas 3 Christian Theobalt
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week