Trajectory Optimization for. Robots
|
|
|
- Elinor McCormick
- 5 years ago
- Views:
Transcription
 @c(x, u) @c(x, u) ˆ =Q + Q I + I Robots @u @u c(xk,uk )T Iµk c(xk, uk ) + diag( k )c(xk, uk ),")
 ˆ Qu = Qu + c(x, u)iµ + diag( ) @u @u http://agile.seas.harvard.edu scottk@seas.harvard.edu Scott Kuindersma Harvard Agile Robotics Lab")
1 LA (x0, U ; µ, ) = `f (xn ) + N X 1 2 k=0 N X1 `(xk, uk ) + k=0 Trajectory Optimization u) ˆ Q =Q + (and u) ˆ =Q + Q I + c(xk,uk )T Iµk c(xk, uk ) + diag( k )c(xk, uk ), xx xx µ uu uu u) ˆ Qxu = Qxu @c(x, u) ˆ Qx = Qx + c(x, u)iµ + @c(x, u) ˆ Qu = Qu + c(x, u)iµ + scottk@seas.harvard.edu Scott Kuindersma Harvard Agile Robotics Lab

2 Why Dynamic Motion Planning? Kinematic planning is simpler But many tasks require careful consideration of dynamics Underactuated systems highlight this point
3 The Simplest Robot θ x = apple θ u base torque ẋ = f(x, u) (nonlinear)
4 How can we choose u=π(x) such that the pendulum stabilizes in the upright position? Invert gravity!
5 Invert Gravity θ Control : reshaping the phase portrait θ
6 6 4 2 θ θ Q: minimal effort solution?
7 The Acrobot one actuator here How do control this system to the vertical position? Underactuated have exploit actuation and passive dynamics to achieve goals!
8 Acrobot Swing-up u=π(x) is not obvious, but we can compute it with optimization! (more later)
9 Acrobot ~ Simple Walker

10 But my robot has lots of motors Don t worry! The tools we will discuss today are useful for generating dynamic behaviors in all kinds of robots!
11 The optimization view of the world There are many ways to generate behaviors in robots: Heuristic methods, virtual model control, programming by demonstration, etc. Optimization is a powerful and general framework for creating goal-directed behavior in robots Encode goals using cost and constraint functions
12 Optimal Control Find a policy, u = (x), that minimizes: subject to J = `f (x N )+ N 1 X k=0 `(x k,u k ) Dynamics constraints: x k+1 = f(x k,u k ) (discrete time) minimize energy move quickly get to the goal
13 A note about time discretization Z tf J = `f (x(t f )) + ẋ = f(x, u) 0 `(x(t),u(t))dt Continuous time ) h = t f /N (time step) J = `f (x N )+ N 1 X k=0 `(x k,u k )h Discrete time x k+1 = x k + h f(x k,u k ) (you can use higher-order integrators too)

 T Q(x N x ref )+ NX 1 k=0 u T k Ru")
14 Example: Airplane Barrel Roll Goal: 180 degree barrel roll States: x 2 R 12 Input: u 2 R 4 Cost: J =(x N x ref ) T Q(x N x ref )+ NX 1 k=0 u T k Ru k
15 An Intuitive Solution π(x) =? Find a policy, u = (x), that minimizes cost π(x) =? Idea: work backwards in time!
16 An Algebraic View Cost: J = `f (x N )+ N 1 X `(x k,u k ) k=0 Define V*(x,n) as the lowest possible cost remaining starting in state x at timestep n At timestep N, there s nothing to do! V (x, N) =`f (x)
17 An Algebraic View V (x, N V (x, N 1) = min u [`(x, u)+`f (x 0 )] 2) = min u x 0 = f(x, u) h i `(x, u)+min[`(x 0,u 0 )+`f (x 00 )] u 0 =min u [`(x, u)+v (x 0,N 1)]
18 An Algebraic View V (x, N V (x, N 1) = min u [`(x, u)+`f (x 0 )] 2) = min u x 0 = f(x, u) h i `(x, u)+min[`(x 0,u 0 )+`f (x 00 )] u 0 =min u [`(x, u)+v (x 0,N 1)] Key idea Bellman s equation V (x, n) =min u [`(x, u)+v (x 0,n+ 1)]
19 Optimal behavior with 1-step lookahead (x, n) = arg min u [`(x, u)+v (x 0,n+ 1)]
20 Quiz V (x, n) =min u [`(x, u)+v (x 0,n+ 1)] Q1: Suppose my cost is quadratic, is also V*(x,n) quadratic in general? A1: No (thanks to nonlinear dynamics) Q2: Does Bellman s equation hold for multiplicative costs? J = NY k=0 `(x k,u k ) A2: No try it on our derivation!
21 Clearly V*(x,n) is useful, so how can we compute it?
![Dynamic Programming Turn Bellman equation into an update rule V (x, n) Simple algorithm: min u [`(x, u)+v (x n+1,n+ 1)] Discretize state space Loop over all](/docs-images/95/123658931/images/22-0.jpg "states Apply Bellman update Until V* converged Polynomial in the number of states but the number of states grows exponentially in the dimension of the robot")
22 Dynamic Programming Turn Bellman equation into an update rule V (x, n) Simple algorithm: min u [`(x, u)+v (x n+1,n+ 1)] Discretize state space Loop over all states Apply Bellman update Until V* converged Polynomial in the number of states but the number of states grows exponentially in the dimension of the robot
23 Curse of Dimensionality As state dimension increases, discretization results in an exponential blowup What if we instead settle for local policies around a trajectory? Which trajectory? How local?
24 Differential Dynamic Programming x goal 1. Input: x 0,u 0:N 1 2. Simulate dynamics forward using x k+1 = f(x k,u k ) x 0 4. Compute an approximation to V(x,k) at every state 5. Compute control modifications using Bellman s equation 6. Go to #2 until convergence
25 Differential Dynamic Programming Given initial trajectory as input, x 0:N,u 0:N 1 Define: Q( x, u) =`(x + x, u + u)+v (f(x + x, u + u)) Approximate to second order: Quadratic approx Q function Q( x, u) 0 x, u
26 Differential Dynamic Programming Quadratic approx Q function Q( x, u) Q( x, u) x5 u 3 0 T 2 x, u 4 0 QT x Q T u Q x Q xx Q xu Q u Q T xu Q uu etc. 1 4 x5, u [see, e.g., Tassa thesis 2011]
27 Backwards Pass Want to minimize Q backwards in time For k=n:0 Set derivative of Q equal to zero, solve for u u = Q 1 uu (Q ux x + Q u ) K x + a Substitute u into Q approximation at time k and compute Q approximation at k-1
 Repeat until convergence x goal e.g., max( u) < x 0 u u 1 0")
28 Forwards Pass Forward simulate system from x0 using feedback controller computed in backwards pass x k+1 = f(x k,u k + K k x k + a k ) Repeat until convergence x goal e.g., max( u) < x 0 u u 1 0
29 Some DDP Variants Most commonly used variant is Iterative LQR (ilqr) Leave out the 2nd derivative of dynamics in Q [Li et al., 2004] Slightly slower convergence (superlinear vs quadratic), otherwise exactly the same algorithm Input-constrained DDP to handle torque limits [Tassa et al., ICRA 14] Unscented dynamic programming Derivative-free, Q update based on the Unscented Transform [Manchester & Kuindersma, CDC 16]


30 Examples Barrel Roll Todorov MPC

31 DDP for Model-Predictive Control

32 DDP for Model-Predictive Control
33 So far Computing globally-optimal policies is infeasible for most robots Instead settle for locally-optimal trajectories DDP is an efficient algorithm for computing trajectories and local feedback controllers, but State constraints require care (typically approximated using costs) Attention to implementation details needed to ensure good numerical performance Assumes f(x,u) is a smooth function of x,u
34 Trajectory Optimization as an NLP We arrived at DDP using Bellman s equation + local approximation We can instead transcribe the optimal control problem as a standard nonlinear program: minimize `f (x N )+ x 0:N,u 0:N 1 N 1 X k=0 subject to x k+1 = f(x k,u k ) g(x k,u k ) apple 0 h(x k,u k )=0 `(x k,u k ) explicit dynamics constraints don t walk through walls keep your left foot on the ground
35 Direct Transcription Why? Easy to add nonlinear state and input constraints Exploit fast and reliable off-the-shelf solvers (e.g., SNOPT [1]) Spend your time designing costs/constraints, not debugging solvers [1]
36 Intuition: Newton s Method A similar picture as before (ignoring constraints) Now updates are performed over entire trajectory, rather than sequentially backwards in time Q( x, u) J... k = N x, u k = N 5 x 0,u 0,...,x N
37 Sequential Quadratic Programming Many powerful off-the-shelf solvers implement SQP High-level idea: At each iteration linearize constraints at current trajectory, construct local quadratic cost Solve local quadratic program (QP) this is easy Iterate until trajectory converges or max iters Lots of important practical details you can safely ignore if using an established solver! [see Nocedal & Wright, 2006]
38 DDP vs. SQP Differential Dynamic Programming Simulates dynamics to compute x 1:N Shooting method Each iteration solves a sequence of small, 1-step optimizations SQP: Satisfies dynamics as explicit constraints (often with smaller N) Direct transcription Each iteration solves a single QP over the entire trajectory
39 Two ends of a spectrum DDP (single shooting) Simulate entire trajectory, 1-step updates Direct transcription Dynamics are constraints for all timesteps, N-step updates Multiple shooting Simulate sub-trajectories, enforce defect constraints
 T Q(x k x nom )+u T k Ru k Final state constraint: x N = x goal Dynamics constraints?")
40 Example: Spring Flamingo apple q q States: x = 2 R 18 Inputs: u 2 R 4 Passive spring ankle Cost: J = X k (x k x nom ) T Q(x k x nom )+u T k Ru k Final state constraint: x N = x goal Dynamics constraints?
41 Handling Contact Dynamics Idea: add contact forces,, as decision variables, 0:N 1 then constrain them to be physical Approach 1: pre-specify contact sequence ahead of time, assign force variables to states in contact Works fine for two feet, but exponentially many possibilities as # of contact points grows Approach 2: Let the solver discover contact sequences for you!
42 Contact-Implicit Constraints Add contact forces,, as decision variables at 0:N 1 each time step, then constrain them to be physical Forces must obey friction limits Robot cannot penetrate the ground: (q) 0 Forces cannot be applied unless on the ground (q) =0 Tangental component maximally dissipates energy
43 Contact-Implicit Direct Transcription minimize `f (x N )+ x 0:N,u 0:N 1, 0:N 1 N 1 X k=0 `(x k,u k ) subject to x k+1 = f(x k,u k, k) constraints{ Contactrelated (q k ) 0 (q k ) k =0 friction, dissipation constraints dynamics includes forces [see: Posa et al. IJRR 13]
44 Complementarity Constraints =0 apple s 0 0 Useful trick: add slack variable s 0, then penalize it in the cost
45 Spring Flamingo SQP Optimization

46 Spring Flamingo SQP Converged

47 LittleDog Climbing a Stair
48 LimpingDog
49 Tracking Trajectories Unlike DDP, direct methods output only the nominal trajectory Running this open loop will fail, even in simulation Hand-tuned PID can work in some cases Linear-quadratic regulator (LQR) a slightly more elegant way to derive linear feedback controllers
50 LQR Trajectory Tracking Given trajectory: Linearize dynamics: x 0:N,u 0:N 1 x k = x x k x k+1 = A k x k + B k ū k ū k = u u k Define a tracking cost: J lqr = x T N Q N x N + N 1 X k=0 Note in general, different from the trajectory optimization cost Desired output: a tracking controller, (x, k), that works in the neighborhood of the trajectory x T k Q x k +ū T k Rū k
51 LQR Trajectory Tracking The return of Bellman! V ( x, N) = x T Q N x V ( x, k) = x T Q x +min u ūt Rū + V ( x 0,k+ 1) Thanks to the linearized dynamics, V* will have a quadratic form for all k=1:n V ( x, k) = x T S k x S k 1 = Q + A T k S k A k A T k S k B k (R + B T k S k B k ) 1 (B T k S k A k ) (skipping ugly algebra)
52 Summary of LQR Set S N = Q N For k=n:1 S k 1 = Q + A T k S k A k A T k S k B k (R + B T k S k B k ) 1 (B T k S k A k ) For k=0:n-1 K k =(R + B T k S k+1 B k ) 1 B T k S k+1 A k Output linear feedback controller: u lqr k = K k (x x k )+u k

53 Control Stabilized Running
54 LQR Variants Slightly different formulations for continuous time and infinite horizon Note MATLAB command: lqr(a,b,q,r) Can handle equality constraints through projection into constraint nullspace (e.g. [Posa, Kuindersma, Tedrake, ICRA 15]) Hybrid variants for handling impacts and reset maps Instantaneously handle input constraints using QPs (e.g. [Kuindersma et al., Auton. Robots 2016])
55 Summary Dynamics matters, especially (but not only) for underactuated systems Most of these ideas have a long history in the control literature outside of robotics Shooting vs direct transcription Multiple shooting is a middle-ground Linear-quadratic feedback is a powerful tool for tracking planned motions Contact constraints are essential for planning manipulation and locomotion behaviors. Many competing strategies, I gave you one Still work to be done

56 Real robots still avoid contact, but we re working on it!
Trajectory Optimization
 C H A P T E R 12 Trajectory Optimization So far, we have discussed a number of ways to solve optimal control problems via state space search (e.g., Dijkstra s and Dynamic Programming/Value Iteration).
C H A P T E R 12 Trajectory Optimization So far, we have discussed a number of ways to solve optimal control problems via state space search (e.g., Dijkstra s and Dynamic Programming/Value Iteration).
Robotics: Science and Systems
 Robotics: Science and Systems Model Predictive Control (MPC) Zhibin Li School of Informatics University of Edinburgh Content Concepts of MPC MPC formulation Objective function and constraints Solving the
Robotics: Science and Systems Model Predictive Control (MPC) Zhibin Li School of Informatics University of Edinburgh Content Concepts of MPC MPC formulation Objective function and constraints Solving the
Using Local Trajectory Optimizers To Speed Up Global. Christopher G. Atkeson. Department of Brain and Cognitive Sciences and
 Using Local Trajectory Optimizers To Speed Up Global Optimization In Dynamic Programming Christopher G. Atkeson Department of Brain and Cognitive Sciences and the Articial Intelligence Laboratory Massachusetts
Using Local Trajectory Optimizers To Speed Up Global Optimization In Dynamic Programming Christopher G. Atkeson Department of Brain and Cognitive Sciences and the Articial Intelligence Laboratory Massachusetts
Problem characteristics. Dynamic Optimization. Examples. Policies vs. Trajectories. Planning using dynamic optimization. Dynamic Optimization Issues
 Problem characteristics Planning using dynamic optimization Chris Atkeson 2004 Want optimal plan, not just feasible plan We will minimize a cost function C(execution). Some examples: C() = c T (x T ) +
Problem characteristics Planning using dynamic optimization Chris Atkeson 2004 Want optimal plan, not just feasible plan We will minimize a cost function C(execution). Some examples: C() = c T (x T ) +
arxiv: v1 [math.oc] 2 Jul 2017
![arxiv: v1 [math.oc] 2 Jul 2017](/thumbs/72/67125582.jpg "arxiv: v1 [math.oc] 2 Jul 2017") Transcription Methods for Trajectory Optimization A beginners tutorial Matthew P. Kelly Cornell University mpk7@cornell.edu February 8, 5 arxiv:77.84v [math.oc] Jul 7 Abstract This report is an introduction
Transcription Methods for Trajectory Optimization A beginners tutorial Matthew P. Kelly Cornell University mpk7@cornell.edu February 8, 5 arxiv:77.84v [math.oc] Jul 7 Abstract This report is an introduction
Optimal Control Techniques for Dynamic Walking
 Optimal Control Techniques for Dynamic Walking Optimization in Robotics & Biomechanics IWR, University of Heidelberg Presentation partly based on slides by Sebastian Sager, Moritz Diehl and Peter Riede
Optimal Control Techniques for Dynamic Walking Optimization in Robotics & Biomechanics IWR, University of Heidelberg Presentation partly based on slides by Sebastian Sager, Moritz Diehl and Peter Riede
In Homework 1, you determined the inverse dynamics model of the spinbot robot to be
 Robot Learning Winter Semester 22/3, Homework 2 Prof. Dr. J. Peters, M.Eng. O. Kroemer, M. Sc. H. van Hoof Due date: Wed 6 Jan. 23 Note: Please fill in the solution on this sheet but add sheets for the
Robot Learning Winter Semester 22/3, Homework 2 Prof. Dr. J. Peters, M.Eng. O. Kroemer, M. Sc. H. van Hoof Due date: Wed 6 Jan. 23 Note: Please fill in the solution on this sheet but add sheets for the
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations
 Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations Peter Englert Machine Learning and Robotics Lab Universität Stuttgart Germany
Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations Peter Englert Machine Learning and Robotics Lab Universität Stuttgart Germany
LQR-RRT : Optimal Sampling-Based Motion Planning with Automatically Derived Extension Heuristics
 LQR-RRT : Optimal Sampling-Based Motion Planning with Automatically Derived Extension Heuristics Alejandro Perez, Robert Platt Jr., George Konidaris, Leslie Kaelbling and Tomas Lozano-Perez Computer Science
LQR-RRT : Optimal Sampling-Based Motion Planning with Automatically Derived Extension Heuristics Alejandro Perez, Robert Platt Jr., George Konidaris, Leslie Kaelbling and Tomas Lozano-Perez Computer Science
Simulation. x i. x i+1. degrees of freedom equations of motion. Newtonian laws gravity. ground contact forces
 Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Hardware Implementation of a Model Predictive Controller for Hybrid Systems
 Hardware Implementation of a Model Predictive Controller for Hybrid Systems By Eng. Mohamed Fatouh Mahmoud Fouda Electronics and Communications Department Faculty of Engineering, Cairo University A Thesis
Hardware Implementation of a Model Predictive Controller for Hybrid Systems By Eng. Mohamed Fatouh Mahmoud Fouda Electronics and Communications Department Faculty of Engineering, Cairo University A Thesis
Standing Balance Control Using a Trajectory Library
 The 29 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 29 St. Louis, USA Standing Balance Control Using a Trajectory Library Chenggang Liu and Christopher G. Atkeson
The 29 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 29 St. Louis, USA Standing Balance Control Using a Trajectory Library Chenggang Liu and Christopher G. Atkeson
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 1 3.1 Linearization and Optimization of Functions of Vectors 1 Problem Notation 2 Outline 3.1.1 Linearization 3.1.2 Optimization of Objective Functions 3.1.3 Constrained
Chapter 3 Numerical Methods Part 1 3.1 Linearization and Optimization of Functions of Vectors 1 Problem Notation 2 Outline 3.1.1 Linearization 3.1.2 Optimization of Objective Functions 3.1.3 Constrained
Planning and Control: Markov Decision Processes
 CSE-571 AI-based Mobile Robotics Planning and Control: Markov Decision Processes Planning Static vs. Dynamic Predictable vs. Unpredictable Fully vs. Partially Observable Perfect vs. Noisy Environment What
CSE-571 AI-based Mobile Robotics Planning and Control: Markov Decision Processes Planning Static vs. Dynamic Predictable vs. Unpredictable Fully vs. Partially Observable Perfect vs. Noisy Environment What
Topics in AI (CPSC 532L): Multimodal Learning with Vision, Language and Sound. Lecture 12: Deep Reinforcement Learning
: Multimodal Learning with Vision, Language and Sound. Lecture 12: Deep Reinforcement Learning") Topics in AI (CPSC 532L): Multimodal Learning with Vision, Language and Sound Lecture 12: Deep Reinforcement Learning Types of Learning Supervised training Learning from the teacher Training data includes
Topics in AI (CPSC 532L): Multimodal Learning with Vision, Language and Sound Lecture 12: Deep Reinforcement Learning Types of Learning Supervised training Learning from the teacher Training data includes
CMPUT 412 Motion Control Wheeled robots. Csaba Szepesvári University of Alberta
 CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
An Efficient Optimal Planning and Control Framework For Quadrupedal Locomotion
 An Efficient Optimal Planning and Control Framework For Quadrupedal Locomotion Farbod Farshidian, Michael Neunert, Alexander W. Winkler, Gonzalo Rey, Jonas Buchli Abstract In this paper, we present an
An Efficient Optimal Planning and Control Framework For Quadrupedal Locomotion Farbod Farshidian, Michael Neunert, Alexander W. Winkler, Gonzalo Rey, Jonas Buchli Abstract In this paper, we present an
DIRECT SEQUENTIAL DYNAMIC OPTIMIZATION WITH AUTOMATIC SWITCHING STRUCTURE DETECTION. Martin Schlegel, Wolfgang Marquardt 1
 DIRECT SEQUENTIAL DYNAMIC OPTIMIZATION WITH AUTOMATIC SWITCHING STRUCTURE DETECTION Martin Schlegel, Wolfgang Marquardt 1 Lehrstuhl für Prozesstechnik, RWTH Aachen University D 52056 Aachen, Germany Abstract:
DIRECT SEQUENTIAL DYNAMIC OPTIMIZATION WITH AUTOMATIC SWITCHING STRUCTURE DETECTION Martin Schlegel, Wolfgang Marquardt 1 Lehrstuhl für Prozesstechnik, RWTH Aachen University D 52056 Aachen, Germany Abstract:
Today s class. Roots of equation Finish up incremental search Open methods. Numerical Methods, Fall 2011 Lecture 5. Prof. Jinbo Bi CSE, UConn
 Today s class Roots of equation Finish up incremental search Open methods 1 False Position Method Although the interval [a,b] where the root becomes iteratively closer with the false position method, unlike
Today s class Roots of equation Finish up incremental search Open methods 1 False Position Method Although the interval [a,b] where the root becomes iteratively closer with the false position method, unlike
Outline. Robust MPC and multiparametric convex programming. A. Bemporad C. Filippi. Motivation: Robust MPC. Multiparametric convex programming
 Robust MPC and multiparametric convex programming A. Bemporad C. Filippi D. Muñoz de la Peña CC Meeting Siena /4 September 003 Outline Motivation: Robust MPC Multiparametric convex programming Kothares
Robust MPC and multiparametric convex programming A. Bemporad C. Filippi D. Muñoz de la Peña CC Meeting Siena /4 September 003 Outline Motivation: Robust MPC Multiparametric convex programming Kothares
A FACTOR GRAPH APPROACH TO CONSTRAINED OPTIMIZATION. A Thesis Presented to The Academic Faculty. Ivan Dario Jimenez
 A FACTOR GRAPH APPROACH TO CONSTRAINED OPTIMIZATION A Thesis Presented to The Academic Faculty By Ivan Dario Jimenez In Partial Fulfillment of the Requirements for the Degree B.S. in Computer Science with
A FACTOR GRAPH APPROACH TO CONSTRAINED OPTIMIZATION A Thesis Presented to The Academic Faculty By Ivan Dario Jimenez In Partial Fulfillment of the Requirements for the Degree B.S. in Computer Science with
A convex, smooth and invertible contact model for trajectory optimization
 A convex, smooth and invertible contact model for trajectory optimization Emanuel Todorov Departments of Applied Mathematics and Computer Science and Engineering University of Washington Abstract Trajectory
A convex, smooth and invertible contact model for trajectory optimization Emanuel Todorov Departments of Applied Mathematics and Computer Science and Engineering University of Washington Abstract Trajectory
Model learning for robot control: a survey
 Model learning for robot control: a survey Duy Nguyen-Tuong, Jan Peters 2011 Presented by Evan Beachly 1 Motivation Robots that can learn how their motors move their body Complexity Unanticipated Environments
Model learning for robot control: a survey Duy Nguyen-Tuong, Jan Peters 2011 Presented by Evan Beachly 1 Motivation Robots that can learn how their motors move their body Complexity Unanticipated Environments
Written exams of Robotics 2
 Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
ACADO Code Generation tool
 ACADO Code Generation tool Rien Quirynen July 31, 2015 Introduction Automatic Code Generation Real-Time Iterations Application examples ACADO demo Outline Introduction Automatic Code Generation Real-Time
ACADO Code Generation tool Rien Quirynen July 31, 2015 Introduction Automatic Code Generation Real-Time Iterations Application examples ACADO demo Outline Introduction Automatic Code Generation Real-Time
Controlling Hybrid Systems
 Controlling Hybrid Systems From Theory to Application Manfred Morari M. Baotic, F. Christophersen, T. Geyer, P. Grieder, M. Kvasnica, G. Papafotiou Lessons learned from a decade of Hybrid System Research
Controlling Hybrid Systems From Theory to Application Manfred Morari M. Baotic, F. Christophersen, T. Geyer, P. Grieder, M. Kvasnica, G. Papafotiou Lessons learned from a decade of Hybrid System Research
Inverse Optimal Control for Humanoid Locomotion
 Inverse Optimal Control for Humanoid Locomotion Taesung Park and Sergey Levine Department of Computer Science, Stanford University E-mail: taesung@graphics.stanford.edu, svlevine@stanford.edu Abstract
Inverse Optimal Control for Humanoid Locomotion Taesung Park and Sergey Levine Department of Computer Science, Stanford University E-mail: taesung@graphics.stanford.edu, svlevine@stanford.edu Abstract
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Today. Golden section, discussion of error Newton s method. Newton s method, steepest descent, conjugate gradient
 Optimization Last time Root finding: definition, motivation Algorithms: Bisection, false position, secant, Newton-Raphson Convergence & tradeoffs Example applications of Newton s method Root finding in
Optimization Last time Root finding: definition, motivation Algorithms: Bisection, false position, secant, Newton-Raphson Convergence & tradeoffs Example applications of Newton s method Root finding in
Constrained and Unconstrained Optimization
 Constrained and Unconstrained Optimization Carlos Hurtado Department of Economics University of Illinois at Urbana-Champaign hrtdmrt2@illinois.edu Oct 10th, 2017 C. Hurtado (UIUC - Economics) Numerical
Constrained and Unconstrained Optimization Carlos Hurtado Department of Economics University of Illinois at Urbana-Champaign hrtdmrt2@illinois.edu Oct 10th, 2017 C. Hurtado (UIUC - Economics) Numerical
Modeling, System Identification, and Control for Dynamic Locomotion of the LittleDog Robot on Rough Terrain. Michael Yurievich Levashov
 Modeling, System Identification, and Control for Dynamic Locomotion of the LittleDog Robot on Rough Terrain by Michael Yurievich Levashov B.S. Aerospace Engineering, B.S. Physics University of Maryland
Modeling, System Identification, and Control for Dynamic Locomotion of the LittleDog Robot on Rough Terrain by Michael Yurievich Levashov B.S. Aerospace Engineering, B.S. Physics University of Maryland
Can we quantify the hardness of learning manipulation? Kris Hauser Department of Electrical and Computer Engineering Duke University
 Can we quantify the hardness of learning manipulation? Kris Hauser Department of Electrical and Computer Engineering Duke University Robot Learning! Robot Learning! Google used 14 identical robots 800,000
Can we quantify the hardness of learning manipulation? Kris Hauser Department of Electrical and Computer Engineering Duke University Robot Learning! Robot Learning! Google used 14 identical robots 800,000
Real-Time Optimization for Fast Nonlinear MPC: Algorithms, Theory, and Applications
 Real-Time Optimization for Fast Nonlinear MPC: Algorithms, Theory, and Applications Moritz Diehl Optimization in Engineering Center OPTEC & ESAT, K.U. Leuven Joint work with H. J. Ferreau*, B. Houska*,
Real-Time Optimization for Fast Nonlinear MPC: Algorithms, Theory, and Applications Moritz Diehl Optimization in Engineering Center OPTEC & ESAT, K.U. Leuven Joint work with H. J. Ferreau*, B. Houska*,
RELATIVELY OPTIMAL CONTROL: THE STATIC SOLUTION
 RELATIVELY OPTIMAL CONTROL: THE STATIC SOLUTION Franco Blanchini,1 Felice Andrea Pellegrino Dipartimento di Matematica e Informatica Università di Udine via delle Scienze, 208 33100, Udine, Italy blanchini@uniud.it,
RELATIVELY OPTIMAL CONTROL: THE STATIC SOLUTION Franco Blanchini,1 Felice Andrea Pellegrino Dipartimento di Matematica e Informatica Università di Udine via delle Scienze, 208 33100, Udine, Italy blanchini@uniud.it,
Ellipsoid Algorithm :Algorithms in the Real World. Ellipsoid Algorithm. Reduction from general case
 Ellipsoid Algorithm 15-853:Algorithms in the Real World Linear and Integer Programming II Ellipsoid algorithm Interior point methods First polynomial-time algorithm for linear programming (Khachian 79)
Ellipsoid Algorithm 15-853:Algorithms in the Real World Linear and Integer Programming II Ellipsoid algorithm Interior point methods First polynomial-time algorithm for linear programming (Khachian 79)
Computation of the Constrained Infinite Time Linear Quadratic Optimal Control Problem
 Computation of the Constrained Infinite Time Linear Quadratic Optimal Control Problem July 5, Introduction Abstract Problem Statement and Properties In this paper we will consider discrete-time linear
Computation of the Constrained Infinite Time Linear Quadratic Optimal Control Problem July 5, Introduction Abstract Problem Statement and Properties In this paper we will consider discrete-time linear
Variational Integration Methods for Simulating and Designing Systems with Simultaneous Impact. Todd Murphey Northwestern University June 27, 2010
 Variational Integration Methods for Simulating and Designing Systems with Simultaneous Impact Todd Murphey Northwestern University June 27, 2010 Purpose of Simulation Simulation provides a way to predict
Variational Integration Methods for Simulating and Designing Systems with Simultaneous Impact Todd Murphey Northwestern University June 27, 2010 Purpose of Simulation Simulation provides a way to predict
Solution to ECE680 HW3
 ECE 680 Solution to HW 3 April 30, 2008 1 Solution to ECE680 HW3 In this homework assignment, we consider the one-link robot manipulator described in Example 5.13 on pp. 256 262 of the text. This system
ECE 680 Solution to HW 3 April 30, 2008 1 Solution to ECE680 HW3 In this homework assignment, we consider the one-link robot manipulator described in Example 5.13 on pp. 256 262 of the text. This system
Solving Optimal Control Problems with ACADO Toolkit
 Solving Optimal Control Problems with ACADO Toolkit Boris Houska, Hans Joachim Ferreau, Moritz Diehl Electrical Engineering Department K.U. Leuven OPTEC Seminar, 2/9/2009 Electrical Engineering Department
Solving Optimal Control Problems with ACADO Toolkit Boris Houska, Hans Joachim Ferreau, Moritz Diehl Electrical Engineering Department K.U. Leuven OPTEC Seminar, 2/9/2009 Electrical Engineering Department
Parametric Sensitivity Analysis of NLP Problems and its Applications to Real-Time Controller Design
 SADCO - Sensitivity Analysis for Deterministic Controller Design Parametric Sensitivity Analysis of NLP Problems and its Applications to Real-Time Controller Design Part 1: Nonlinear Real-Time Optimization
SADCO - Sensitivity Analysis for Deterministic Controller Design Parametric Sensitivity Analysis of NLP Problems and its Applications to Real-Time Controller Design Part 1: Nonlinear Real-Time Optimization
Motion Capture & Simulation
 Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Optimization of a two-link Robotic Manipulator
 Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
Neighboring optimal control for periodic tasks for systems with discontinuous dynamics
 . RESEARCH PAPERS. SCIENCE CHINA Information Sciences March 211 Vol. 54 No. 3: 653 663 doi: 1.17/s11432-11-4185-z Neighboring optimal control for periodic tasks for systems with discontinuous dynamics
. RESEARCH PAPERS. SCIENCE CHINA Information Sciences March 211 Vol. 54 No. 3: 653 663 doi: 1.17/s11432-11-4185-z Neighboring optimal control for periodic tasks for systems with discontinuous dynamics
Func%on Approxima%on. Pieter Abbeel UC Berkeley EECS
 Func%on Approxima%on Pieter Abbeel UC Berkeley EECS Value Itera4on Algorithm: Start with for all s. For i=1,, H For all states s 2 S: Imprac4cal for large state spaces = the expected sum of rewards accumulated
Func%on Approxima%on Pieter Abbeel UC Berkeley EECS Value Itera4on Algorithm: Start with for all s. For i=1,, H For all states s 2 S: Imprac4cal for large state spaces = the expected sum of rewards accumulated
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
LECTURE NOTES Non-Linear Programming
 CEE 6110 David Rosenberg p. 1 Learning Objectives LECTURE NOTES Non-Linear Programming 1. Write out the non-linear model formulation 2. Describe the difficulties of solving a non-linear programming model
CEE 6110 David Rosenberg p. 1 Learning Objectives LECTURE NOTES Non-Linear Programming 1. Write out the non-linear model formulation 2. Describe the difficulties of solving a non-linear programming model
Introduction to robot algorithms CSE 410/510
 Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Maximizing an interpolating quadratic
 Week 11: Monday, Apr 9 Maximizing an interpolating quadratic Suppose that a function f is evaluated on a reasonably fine, uniform mesh {x i } n i=0 with spacing h = x i+1 x i. How can we find any local
Week 11: Monday, Apr 9 Maximizing an interpolating quadratic Suppose that a function f is evaluated on a reasonably fine, uniform mesh {x i } n i=0 with spacing h = x i+1 x i. How can we find any local
Infinite Time Optimal Control of Hybrid Systems with a Linear Performance Index
 Infinite Time Optimal Control of Hybrid Systems with a Linear Performance Index Mato Baotić, Frank J. Christophersen, and Manfred Morari Automatic Control Laboratory, ETH Zentrum, ETL K 1, CH 9 Zürich,
Infinite Time Optimal Control of Hybrid Systems with a Linear Performance Index Mato Baotić, Frank J. Christophersen, and Manfred Morari Automatic Control Laboratory, ETH Zentrum, ETL K 1, CH 9 Zürich,
Sampling-Based Motion Planning
 Sampling-Based Motion Planning Pieter Abbeel UC Berkeley EECS Many images from Lavalle, Planning Algorithms Motion Planning Problem Given start state x S, goal state x G Asked for: a sequence of control
Sampling-Based Motion Planning Pieter Abbeel UC Berkeley EECS Many images from Lavalle, Planning Algorithms Motion Planning Problem Given start state x S, goal state x G Asked for: a sequence of control
Synthesis and Stabilization of Complex Behaviors through Online Trajectory Optimization
 01 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-1, 01. Vilamoura, Algarve, Portugal Synthesis and Stabilization of Complex Behaviors through Online Trajectory Optimization
01 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-1, 01. Vilamoura, Algarve, Portugal Synthesis and Stabilization of Complex Behaviors through Online Trajectory Optimization
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Humanoid Robots 2: Dynamic Modeling
 Autonomous and Mobile Robotics rof. Giuseppe Oriolo Humanoid Robots 2: Dynamic Modeling modeling multi-body free floating complete model m j I j R j ω j f c j O z y x p ZM conceptual models for walking/balancing
Autonomous and Mobile Robotics rof. Giuseppe Oriolo Humanoid Robots 2: Dynamic Modeling modeling multi-body free floating complete model m j I j R j ω j f c j O z y x p ZM conceptual models for walking/balancing
Non-holonomic Planning
 Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Introduction to Machine Learning
 Introduction to Machine Learning Maximum Margin Methods Varun Chandola Computer Science & Engineering State University of New York at Buffalo Buffalo, NY, USA chandola@buffalo.edu Chandola@UB CSE 474/574
Introduction to Machine Learning Maximum Margin Methods Varun Chandola Computer Science & Engineering State University of New York at Buffalo Buffalo, NY, USA chandola@buffalo.edu Chandola@UB CSE 474/574
Quadruped Robots and Legged Locomotion
 Quadruped Robots and Legged Locomotion J. Zico Kolter Computer Science Department Stanford University Joint work with Pieter Abbeel, Andrew Ng Why legged robots? 1 Why Legged Robots? There is a need for
Quadruped Robots and Legged Locomotion J. Zico Kolter Computer Science Department Stanford University Joint work with Pieter Abbeel, Andrew Ng Why legged robots? 1 Why Legged Robots? There is a need for
Mass-Spring Systems. Last Time?
 Mass-Spring Systems Last Time? Implicit Surfaces & Marching Cubes/Tetras Collision Detection & Conservative Bounding Regions Spatial Acceleration Data Structures Octree, k-d tree, BSF tree 1 Today Particle
Mass-Spring Systems Last Time? Implicit Surfaces & Marching Cubes/Tetras Collision Detection & Conservative Bounding Regions Spatial Acceleration Data Structures Octree, k-d tree, BSF tree 1 Today Particle
Introduction to Optimization Problems and Methods
 Introduction to Optimization Problems and Methods wjch@umich.edu December 10, 2009 Outline 1 Linear Optimization Problem Simplex Method 2 3 Cutting Plane Method 4 Discrete Dynamic Programming Problem Simplex
Introduction to Optimization Problems and Methods wjch@umich.edu December 10, 2009 Outline 1 Linear Optimization Problem Simplex Method 2 3 Cutting Plane Method 4 Discrete Dynamic Programming Problem Simplex
An interesting related problem is Buffon s Needle which was first proposed in the mid-1700 s.
 Using Monte Carlo to Estimate π using Buffon s Needle Problem An interesting related problem is Buffon s Needle which was first proposed in the mid-1700 s. Here s the problem (in a simplified form). Suppose
Using Monte Carlo to Estimate π using Buffon s Needle Problem An interesting related problem is Buffon s Needle which was first proposed in the mid-1700 s. Here s the problem (in a simplified form). Suppose
Concept of Curve Fitting Difference with Interpolation
 Curve Fitting Content Concept of Curve Fitting Difference with Interpolation Estimation of Linear Parameters by Least Squares Curve Fitting by Polynomial Least Squares Estimation of Non-linear Parameters
Curve Fitting Content Concept of Curve Fitting Difference with Interpolation Estimation of Linear Parameters by Least Squares Curve Fitting by Polynomial Least Squares Estimation of Non-linear Parameters
Efficient implementation of Constrained Min-Max Model Predictive Control with Bounded Uncertainties
 Efficient implementation of Constrained Min-Max Model Predictive Control with Bounded Uncertainties D.R. Ramírez 1, T. Álamo and E.F. Camacho2 Departamento de Ingeniería de Sistemas y Automática, Universidad
Efficient implementation of Constrained Min-Max Model Predictive Control with Bounded Uncertainties D.R. Ramírez 1, T. Álamo and E.F. Camacho2 Departamento de Ingeniería de Sistemas y Automática, Universidad
CasADi tutorial Introduction
 Lund, 6 December 2011 CasADi tutorial Introduction Joel Andersson Department of Electrical Engineering (ESAT-SCD) & Optimization in Engineering Center (OPTEC) Katholieke Universiteit Leuven OPTEC (ESAT
Lund, 6 December 2011 CasADi tutorial Introduction Joel Andersson Department of Electrical Engineering (ESAT-SCD) & Optimization in Engineering Center (OPTEC) Katholieke Universiteit Leuven OPTEC (ESAT
Code Generation for Embedded Convex Optimization
 Code Generation for Embedded Convex Optimization Jacob Mattingley Stanford University October 2010 Convex optimization Problems solvable reliably and efficiently Widely used in scheduling, finance, engineering
Code Generation for Embedded Convex Optimization Jacob Mattingley Stanford University October 2010 Convex optimization Problems solvable reliably and efficiently Widely used in scheduling, finance, engineering
AC : ADAPTIVE ROBOT MANIPULATORS IN GLOBAL TECHNOLOGY
 AC 2009-130: ADAPTIVE ROBOT MANIPULATORS IN GLOBAL TECHNOLOGY Alireza Rahrooh, University of Central Florida Alireza Rahrooh is aprofessor of Electrical Engineering Technology at the University of Central
AC 2009-130: ADAPTIVE ROBOT MANIPULATORS IN GLOBAL TECHNOLOGY Alireza Rahrooh, University of Central Florida Alireza Rahrooh is aprofessor of Electrical Engineering Technology at the University of Central
Chapter II. Linear Programming
 1 Chapter II Linear Programming 1. Introduction 2. Simplex Method 3. Duality Theory 4. Optimality Conditions 5. Applications (QP & SLP) 6. Sensitivity Analysis 7. Interior Point Methods 1 INTRODUCTION
1 Chapter II Linear Programming 1. Introduction 2. Simplex Method 3. Duality Theory 4. Optimality Conditions 5. Applications (QP & SLP) 6. Sensitivity Analysis 7. Interior Point Methods 1 INTRODUCTION
Dynamic State Estimation using Quadratic Programming
 214 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 214) September 14-18, 214, Chicago, IL, USA Dynamic State Estimation using Quadratic Programming X Xinjilefu, Siyuan Feng and
214 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 214) September 14-18, 214, Chicago, IL, USA Dynamic State Estimation using Quadratic Programming X Xinjilefu, Siyuan Feng and
Neuro-Dynamic Programming An Overview
 1 Neuro-Dynamic Programming An Overview Dimitri Bertsekas Dept. of Electrical Engineering and Computer Science M.I.T. May 2006 2 BELLMAN AND THE DUAL CURSES Dynamic Programming (DP) is very broadly applicable,
1 Neuro-Dynamic Programming An Overview Dimitri Bertsekas Dept. of Electrical Engineering and Computer Science M.I.T. May 2006 2 BELLMAN AND THE DUAL CURSES Dynamic Programming (DP) is very broadly applicable,
Mobile Robots Locomotion
 Mobile Robots Locomotion Institute for Software Technology 1 Course Outline 1. Introduction to Mobile Robots 2. Locomotion 3. Sensors 4. Localization 5. Environment Modelling 6. Reactive Navigation 2 Today
Mobile Robots Locomotion Institute for Software Technology 1 Course Outline 1. Introduction to Mobile Robots 2. Locomotion 3. Sensors 4. Localization 5. Environment Modelling 6. Reactive Navigation 2 Today
LEARNING AND APPROXIMATE DYNAMIC PROGRAMMING. Scaling Up to the Real World
 LEARNING AND APPROXIMATE DYNAMIC PROGRAMMING Scaling Up to the Real World LEARNING AND APPROXIMATE DYNAMIC PROGRAMMING Scaling Up to the Real World Edited by Jennie Si, Andy Barto, Warren Powell, and
LEARNING AND APPROXIMATE DYNAMIC PROGRAMMING Scaling Up to the Real World LEARNING AND APPROXIMATE DYNAMIC PROGRAMMING Scaling Up to the Real World Edited by Jennie Si, Andy Barto, Warren Powell, and
Push Recovery Control for Force-Controlled Humanoid Robots
 Push Recovery Control for Force-Controlled Humanoid Robots Benjamin Stephens CMU-RI-TR-11-15 Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Robotics The
Push Recovery Control for Force-Controlled Humanoid Robots Benjamin Stephens CMU-RI-TR-11-15 Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Robotics The
ROSE-HULMAN INSTITUTE OF TECHNOLOGY
 Introduction to Working Model Welcome to Working Model! What is Working Model? It's an advanced 2-dimensional motion simulation package with sophisticated editing capabilities. It allows you to build and
Introduction to Working Model Welcome to Working Model! What is Working Model? It's an advanced 2-dimensional motion simulation package with sophisticated editing capabilities. It allows you to build and
KINEMATICS FOR ANIMATION. Rémi Ronfard, Animation, M2R MOSIG
 KINEMATICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Direct and inverse kinematics in animation Fast numerical methods for inverse kinematics by Bill Baxter My Adventures with Inverse Kinematics
KINEMATICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Direct and inverse kinematics in animation Fast numerical methods for inverse kinematics by Bill Baxter My Adventures with Inverse Kinematics
Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm
 Acta Technica 61, No. 4A/2016, 189 200 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm Jianrong Bu 1, Junyan
Acta Technica 61, No. 4A/2016, 189 200 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm Jianrong Bu 1, Junyan
Fast Direct Multiple Shooting Algorithms for Optimal Robot Control
 Fast Direct Multiple Shooting Algorithms for Optimal Robot Control Moritz Diehl, Hans Georg Bock, Holger Diedam, Pierre-Brice Wieber To cite this version: Moritz Diehl, Hans Georg Bock, Holger Diedam,
Fast Direct Multiple Shooting Algorithms for Optimal Robot Control Moritz Diehl, Hans Georg Bock, Holger Diedam, Pierre-Brice Wieber To cite this version: Moritz Diehl, Hans Georg Bock, Holger Diedam,
Automated Trajectory Morphing For Marionettes Using Trajectory Optimization
 Automated Trajectory Morphing For Marionettes Using Trajectory Optimization Elliot R. Johnson and Todd D. Murphey Electrical and Computer Engineering University of Colorado at Boulder Boulder, Colorado
Automated Trajectory Morphing For Marionettes Using Trajectory Optimization Elliot R. Johnson and Todd D. Murphey Electrical and Computer Engineering University of Colorado at Boulder Boulder, Colorado
3 Model-Based Adaptive Critic
 3 Model-Based Adaptive Critic Designs SILVIA FERRARI Duke University ROBERT F. STENGEL Princeton University Editor s Summary: This chapter provides an overview of model-based adaptive critic designs, including
3 Model-Based Adaptive Critic Designs SILVIA FERRARI Duke University ROBERT F. STENGEL Princeton University Editor s Summary: This chapter provides an overview of model-based adaptive critic designs, including
CONTROL ALLOCATION FOR AIRSHIPS
 International Journal of Civil Engineering and Technology (IJCIET) Volume 9, Issue 3, March 2018, pp. 887 895, Article ID: IJCIET_09_03_088 Available online at http://www.iaeme.com/ijciet/issues.asp?jtype=ijciet&vtype=9&itype=3
International Journal of Civil Engineering and Technology (IJCIET) Volume 9, Issue 3, March 2018, pp. 887 895, Article ID: IJCIET_09_03_088 Available online at http://www.iaeme.com/ijciet/issues.asp?jtype=ijciet&vtype=9&itype=3
Value Function Approximation and Model Predictive Control
 Value Function Approximation and Model Predictive Control Mingyuan Zhong, Mikala Johnson, Yuval Tassa, Tom Erez and Emanuel Todorov Department of Applied Mathematics University of Washington, Seattle,
Value Function Approximation and Model Predictive Control Mingyuan Zhong, Mikala Johnson, Yuval Tassa, Tom Erez and Emanuel Todorov Department of Applied Mathematics University of Washington, Seattle,
Partial Derivatives (Online)
") 7in x 10in Felder c04_online.tex V3 - January 21, 2015 9:44 A.M. Page 1 CHAPTER 4 Partial Derivatives (Online) 4.7 Tangent Plane Approximations and Power Series It is often helpful to use a linear approximation
7in x 10in Felder c04_online.tex V3 - January 21, 2015 9:44 A.M. Page 1 CHAPTER 4 Partial Derivatives (Online) 4.7 Tangent Plane Approximations and Power Series It is often helpful to use a linear approximation
MBS MODELLING WITH SIMMECHANICS: CASE STUDIES IN RESEARCH AND EDUCATION
 MBS MODELLING WITH SIMMECHANICS: CASE STUDIES IN RESEARCH AND EDUCATION Grepl, R., Lee, B., Singule, V., Švejda, P., Vlachý, D., Zezula, P. Laboratory of mechatronics, FME, Brno University of Technology
MBS MODELLING WITH SIMMECHANICS: CASE STUDIES IN RESEARCH AND EDUCATION Grepl, R., Lee, B., Singule, V., Švejda, P., Vlachý, D., Zezula, P. Laboratory of mechatronics, FME, Brno University of Technology
Humanoid Robotics. Path Planning and Walking. Maren Bennewitz
 Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Dynamic Controllers in Character Animation. Jack Wang
 Dynamic Controllers in Character Animation Jack Wang Overview Definition Related Work Composable Controllers Framework (2001) Results Future Work 2 Physics-based Animation Dynamic Controllers vs. Simulation
Dynamic Controllers in Character Animation Jack Wang Overview Definition Related Work Composable Controllers Framework (2001) Results Future Work 2 Physics-based Animation Dynamic Controllers vs. Simulation
Manipulator trajectory planning
 Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Learning of Closed-Loop Motion Control
 Preprint 22.6.214 - To appear in Proceedings of the 214 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 214) - (c) IEEE Learning of Closed-Loop Motion Control Farbod Farshidian,
Preprint 22.6.214 - To appear in Proceedings of the 214 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 214) - (c) IEEE Learning of Closed-Loop Motion Control Farbod Farshidian,
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Learning algorithms for physical systems: challenges and solutions
 Learning algorithms for physical systems: challenges and solutions Ion Matei Palo Alto Research Center 2018 PARC 1 All Rights Reserved System analytics: how things are done Use of models (physics) to inform
Learning algorithms for physical systems: challenges and solutions Ion Matei Palo Alto Research Center 2018 PARC 1 All Rights Reserved System analytics: how things are done Use of models (physics) to inform
PRIMAL-DUAL INTERIOR POINT METHOD FOR LINEAR PROGRAMMING. 1. Introduction
 PRIMAL-DUAL INTERIOR POINT METHOD FOR LINEAR PROGRAMMING KELLER VANDEBOGERT AND CHARLES LANNING 1. Introduction Interior point methods are, put simply, a technique of optimization where, given a problem
PRIMAL-DUAL INTERIOR POINT METHOD FOR LINEAR PROGRAMMING KELLER VANDEBOGERT AND CHARLES LANNING 1. Introduction Interior point methods are, put simply, a technique of optimization where, given a problem
Note on Neoclassical Growth Model: Value Function Iteration + Discretization
 1 Introduction Note on Neoclassical Growth Model: Value Function Iteration + Discretization Makoto Nakajima, UIUC January 27 We study the solution algorithm using value function iteration, and discretization
1 Introduction Note on Neoclassical Growth Model: Value Function Iteration + Discretization Makoto Nakajima, UIUC January 27 We study the solution algorithm using value function iteration, and discretization
Natural Language Processing
 Natural Language Processing Classification III Dan Klein UC Berkeley 1 Classification 2 Linear Models: Perceptron The perceptron algorithm Iteratively processes the training set, reacting to training errors
Natural Language Processing Classification III Dan Klein UC Berkeley 1 Classification 2 Linear Models: Perceptron The perceptron algorithm Iteratively processes the training set, reacting to training errors
Recent developments in simulation, optimization and control of flexible multibody systems
 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Simplified Walking: A New Way to Generate Flexible Biped Patterns
 1 Simplified Walking: A New Way to Generate Flexible Biped Patterns Jinsu Liu 1, Xiaoping Chen 1 and Manuela Veloso 2 1 Computer Science Department, University of Science and Technology of China, Hefei,
1 Simplified Walking: A New Way to Generate Flexible Biped Patterns Jinsu Liu 1, Xiaoping Chen 1 and Manuela Veloso 2 1 Computer Science Department, University of Science and Technology of China, Hefei,
A Short SVM (Support Vector Machine) Tutorial
 Tutorial") A Short SVM (Support Vector Machine) Tutorial j.p.lewis CGIT Lab / IMSC U. Southern California version 0.zz dec 004 This tutorial assumes you are familiar with linear algebra and equality-constrained optimization/lagrange
A Short SVM (Support Vector Machine) Tutorial j.p.lewis CGIT Lab / IMSC U. Southern California version 0.zz dec 004 This tutorial assumes you are familiar with linear algebra and equality-constrained optimization/lagrange
Semi-parametric Approaches to Learning in Model-Based Hierarchical Control of Complex Systems
 Semi-parametric Approaches to Learning in Model-Based Hierarchical Control of Complex Systems Munzir Zafar, Areeb Mehmood, Mouhyemen Khan, Shimin Zhang, Muhammad Murtaza, Victor Aladele, Evangelos A. Theodorou,
Semi-parametric Approaches to Learning in Model-Based Hierarchical Control of Complex Systems Munzir Zafar, Areeb Mehmood, Mouhyemen Khan, Shimin Zhang, Muhammad Murtaza, Victor Aladele, Evangelos A. Theodorou,
Policy gradient methods with model predictive control applied to ball bouncing
 Policy gradient methods with model predictive control applied to ball bouncing Paul Kulchenko Department of Computer Science and Engineering University of Washington, Seattle, WA Email: paul@kulchenko.com
Policy gradient methods with model predictive control applied to ball bouncing Paul Kulchenko Department of Computer Science and Engineering University of Washington, Seattle, WA Email: paul@kulchenko.com
FROST*: Fast Robot Optimization and Simulation Toolkit
 FROST*: Fast Robot Optimization and Simulation Toolkit Ayonga Hereid 1 and Aaron D. Ames 2 Abstract This paper presents FROST, an open-source MAT- LAB toolkit for modeling, trajectory optimization and
FROST*: Fast Robot Optimization and Simulation Toolkit Ayonga Hereid 1 and Aaron D. Ames 2 Abstract This paper presents FROST, an open-source MAT- LAB toolkit for modeling, trajectory optimization and
arxiv: v1 [cs.ro] 16 Oct 2014
![arxiv: v1 [cs.ro] 16 Oct 2014](/thumbs/85/92613212.jpg "arxiv: v1 [cs.ro] 16 Oct 2014") Prioritized Optimal Control Andrea Del Prete 1, Francesco Romano 2, Lorenzo Natale 1, Giorgio Metta 1, Giulio Sandini 2, Francesco Nori 2 arxiv:1410.4414v1 [cs.ro] 16 Oct 2014 Abstract This paper presents
Prioritized Optimal Control Andrea Del Prete 1, Francesco Romano 2, Lorenzo Natale 1, Giorgio Metta 1, Giulio Sandini 2, Francesco Nori 2 arxiv:1410.4414v1 [cs.ro] 16 Oct 2014 Abstract This paper presents
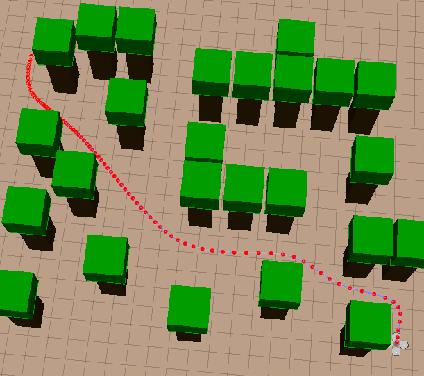
CSE 490R P3 - Model Learning and MPPI Due date: Sunday, Feb 28-11:59 PM
 CSE 490R P3 - Model Learning and MPPI Due date: Sunday, Feb 28-11:59 PM 1 Introduction In this homework, we revisit the concept of local control for robot navigation, as well as integrate our local controller
CSE 490R P3 - Model Learning and MPPI Due date: Sunday, Feb 28-11:59 PM 1 Introduction In this homework, we revisit the concept of local control for robot navigation, as well as integrate our local controller