Automatic Panoramic Image Stitching. Dr. Matthew Brown, University of Bath
|
|
|
- Godwin Kelley
- 6 years ago
- Views:
Transcription
1 Automatic Panoramic Image Stitching Dr. Matthew Brown, University of Bath
2 Automatic 2D Stitching The old days: panoramic stitchers were limited to a 1-D sweep 2005: 2-D stitchers use object recognition for discovery of overlaps 2



3 AutoStitch iphone Create gorgeous panoramic photos on your iphone - Cult of Mac Raises the bar on iphone panoramas - TUAW Magically combines the resulting shots - New York Times 3


4 4F12 class of 99 Projection 37 Case study Image mosaicing Any two images of a general scene with the same camera centre are related by a planar projective transformation given by: w = KRK 1 w where K represents the camera calibration matrix and R is the rotation between the views. This projective transformation is also known as the homography induced by the plane at infinity. A minimum of four image correspondences can be used to estimate the homography and to warp the images onto a common image plane. This is known as mosaicing. 4
5 Meanwhile in David Lowe publishes Scale Invariant Feature Transform 11,572 citations on Google scholar A breakthrough solution to the correspondence problem SIFT is capable of operating over much wider baselines than previous methods Figure 5: Examples of 3D object recognition with occlusion. Figure 4: Top row shows model images for 3D objects with outlines found by background segmentation. Bottom image shows recognition results for 3D objects with model outlines and image keys used for matching. 7. Experiments Figure 5: Examples o The affine solution provides a good approximation to perspective projection of planar objects, so planar models provide a good initial test of the approach. The top row of FigFigure 5: Examples of 3D object recognition with occlusion. ure 3 shows three model images of rectangular planar faces4: Top row shows model images for 3D objects with Figure of objects. The figure also shows a cluttered image outlines contain-found by background segmentation. Bottom image ing the planar objects, and the same image is shown overshows recognition results for 3D objects with model outlines 7. Experiments layed with the models following recognition. Theand model image keys used for matching. keys that are displayed are the ones used for recognition and 7. Experimen [ Lowe ICCV 1999 ] mined by solving the corresponding normal equations, The affine solution p spective projection of vide a good initial tes ure 3 shows three mo of objects. The figure 5



![.. [ ].](/docs-images/74/70460763/images/6-3.jpg "..compute")




6 Local Feature Matching Given a point in the world... [ ]...compute a description of that point that can be easily found in other images 6

2 (trace Hnorm L)2 (det")
) =.")
7 Scale Invariant Feature Transform 12 Lindeberg Start by detecting points of interest (blobs) original image scale-space maxima of ( 2norm L)2 (trace Hnorm L)2 (det Hnorm L)2 Find maxima of image Laplacian over scale and space 2I 2I L(I(x)) =. I = + x2 y 2 [ T. Lindeberg ] 7
8 Scale Invariant Feature Transform Describe local region by distribution (over angle) of gradients Each descriptor: 4 x 4 grid x 8 orientations = 128 dimensions 8



9 Scale Invariant Feature Transform Extract SIFT features from an image Each image might generate 100 s or 1000 s of SIFT descriptors [ A. Vedaldi ] 9

10 Feature Matching Goal: Find all correspondences between a pair of images? Extract and match all SIFT descriptors from both images [ A. Vedaldi ] 10
11 Feature Matching Each SIFT feature is represented by 128 numbers Feature matching becomes task of finding a nearby 128-d vector All nearest neighbours: j NN(j) = arg min i Solving this exactly is O(n 2 ), but good approximate algorithms exist e.g., [Beis, Lowe 97] Best-bin first k-d tree x i x j, i= j Construct a binary tree in 128-d, splitting on the coordinate dimensions Find approximate nearest neighbours by successively exploring nearby branches of the tree 11
12 2-view Rotational Geometry Feature matching returns a set of noisy correspondences To get further, we will have to understand something about the geometry of the setup 12
13 2-view Rotational Geometry Recall the projection equation for a pinhole camera ũ = K R t X ũ [u, v, 1] T X [X, Y, Z, 1] T K (3 3) R (3 3) t (3 1) : Homogeneous image position : Homogeneous world coordinates : Intrinsic (calibration) matrix : Rotation matrix : Translation vector 13
14 2-view Rotational Geometry Consider two cameras at the same position (translation) WLOG we can put the origin of coordinates there ũ 1 = K 1 [ R 1 t 1 ] X Set translation to 0 ũ 1 = K 1 [ R 1 0 ] X Remember X [X, Y, Z, 1] T so ũ 1 = K 1 R 1 X (where X =[X, Y, Z] T ) 14
15 2-view Rotational Geometry Add a second camera (same translation but different rotation and intrinsic matrix) Now eliminate X ũ 1 = K 1 R 1 X ũ 2 = K 2 R 2 X X = R T 1 K 1 1 ũ1 Substitute in equation 1 ũ 2 = K 2 R 2 R T 1 K 1 1 ũ1 This is a 3x3 matrix -- a (special form) of homography 15
16 Computing H: Quiz s u v = h 11 h 12 h 13 h 21 h 22 h 23 x y 1 h 31 h 32 h 33 1 Each correspondence between 2 images generates equations A homography has degrees of freedom point correspondences are needed to compute the homography Rearranging to make H the subject leads to an equation of the form This can be solved by Mh = 0 16
")
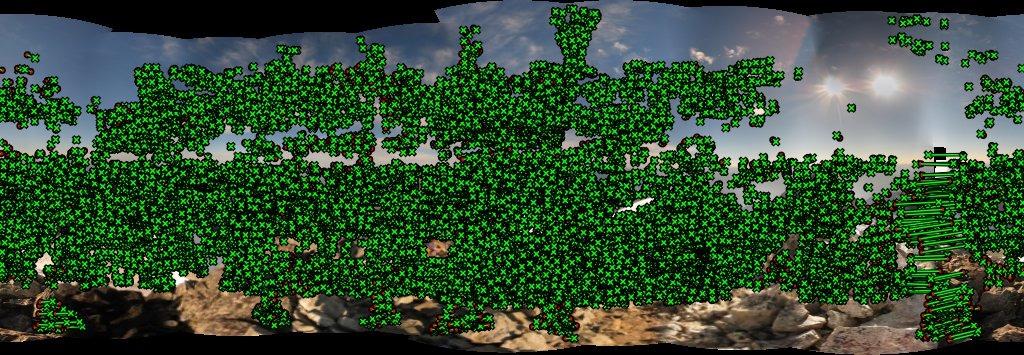
17 Finding Consistent Matches Raw SIFT correspondences (contains outliers) 17

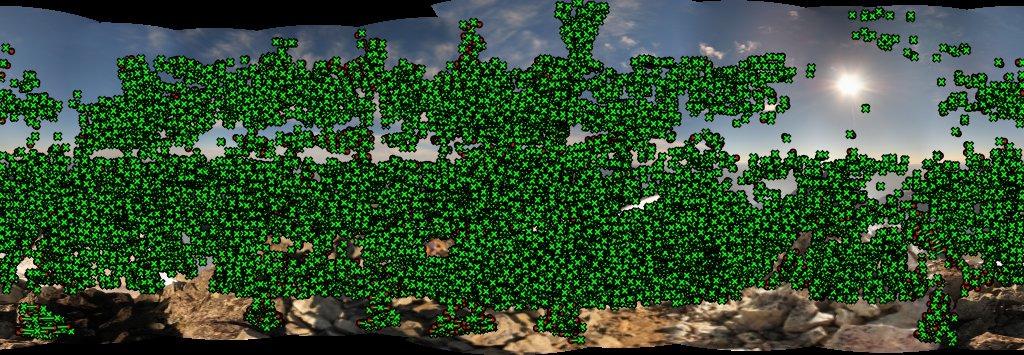
18 Finding Consistent Matches SIFT matches consistent with a rotational homography 18

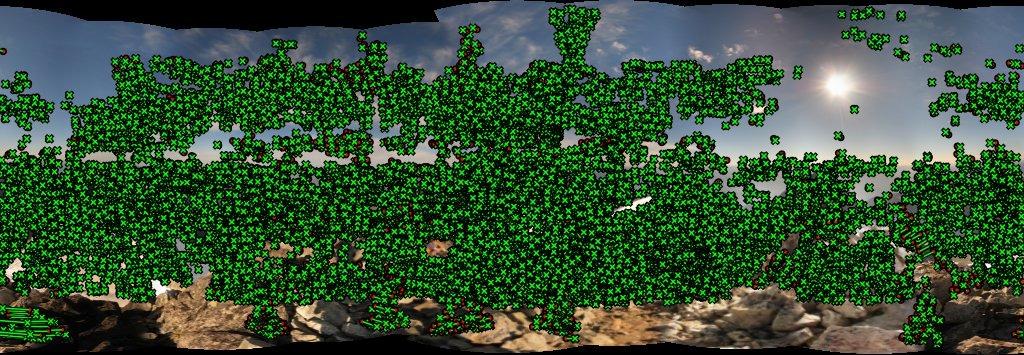
19 Finding Consistent Matches Warp images to common coordinate frame 19
20 RANSAC RAndom SAmple Consensus [Fischler-Bolles 81] Allows us to robustly estimate the best fitting homography despite noisy correspondences Basic principle: select the smallest random subset that can be used to compute H Calculate the support for this hypothesis, by counting the number of inliers to the transformation Repeat sampling, choosing H that maximises # inliers 20
21 RANSAC H = eye(3,3); nbest = 0; for (int i = 0; i < niterations; i++) { P4 = SelectRandomSubset(P); Hi = ComputeHomography(P4); ninliers = ComputeInliers(Hi); if (ninliers > nbest) { H = Hi; nbest = ninliers; } } 21


























22 Recognising Panoramas [ Brown, Lowe ICCV 03 ] 22
23 Global Alignment The pairwise image relationships are given by homographies But over time multiple pairwise mappings will accumulate errors Notice: gap in panorama before it is closed... 23


24 Gap Closing 24
25 Bundle Adjustment 25
26 Bundle Adjustment Minimise sum of robustified residuals e(θ) = n p i=1 jv(i) f(u ij (Θ) m ij ) - u ij = projected position of point i in image j - m ij = measured position of point i in image j - V(i) = set of images where point i is visible - n p = # points/tracks (mutual feature matches across images) - = camera parameters Θ Robust error function (Huber) f(x) = x 2, 2σ x σ 2, x < σ x σ 26

27 Aerial Image Stitching [ Images: SenseFly, Zufferey, Beleyer EPFL] 27
 and Yellowstone National Park Service")
28 Yellowstone Geysers [ B. Planar-Friedrich (U. Bayreuth) and Yellowstone National Park Service ] 28

29 Endoscope Imaging [ E. Seibel, J. Wong (U. Washington) ] 29


30 Other topics Blending/Gain compensation/hdr -- how to combine multiple images to give a consistent, seamless result Gravity direction estimate -- how do we know which way is up? Different projections -- rectilinear, spherical, cylindrical, fisheye... More details 30







31 iphone Computer Vision Apps Also good: Kooaba Déjà vu, Photosynth, Word Lens 31







32 Aardman, Disney, Double Negative, EA, Frontier, BBC, Buro Happold, Smoke and Mirrors... PhD and EngD positions starting September
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Today s lecture. Image Alignment and Stitching. Readings. Motion models
 Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Image stitching. Announcements. Outline. Image stitching
 Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry
 CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Lecture 9: inverting the imaging process calibration, recovery of world position, mosaicing
 Lecture 9: inverting the imaging process calibration, recovery of world position, mosaicing Dr. Richard E. Turner (ret26@cam.ac.uk) November 7, 2013 House keeping examples sheet solutions will be put on
Lecture 9: inverting the imaging process calibration, recovery of world position, mosaicing Dr. Richard E. Turner (ret26@cam.ac.uk) November 7, 2013 House keeping examples sheet solutions will be put on
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Image-based Modeling and Rendering: 8. Image Transformation and Panorama
 Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Feature Matching and RANSAC
 Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Invariant Features from Interest Point Groups
 Invariant Features from Interest Point Groups Matthew Brown and David Lowe {mbrown lowe}@cs.ubc.ca Department of Computer Science, University of British Columbia, Vancouver, Canada. Abstract This paper
Invariant Features from Interest Point Groups Matthew Brown and David Lowe {mbrown lowe}@cs.ubc.ca Department of Computer Science, University of British Columbia, Vancouver, Canada. Abstract This paper
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Panoramic Image Stitching
 Mcgill University Panoramic Image Stitching by Kai Wang Pengbo Li A report submitted in fulfillment for the COMP 558 Final project in the Faculty of Computer Science April 2013 Mcgill University Abstract
Mcgill University Panoramic Image Stitching by Kai Wang Pengbo Li A report submitted in fulfillment for the COMP 558 Final project in the Faculty of Computer Science April 2013 Mcgill University Abstract
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Stitching and Blending
 Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Image Based Rendering. D.A. Forsyth, with slides from John Hart
 Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
CSCI 5980/8980: Assignment #4. Fundamental Matrix
 Submission CSCI 598/898: Assignment #4 Assignment due: March 23 Individual assignment. Write-up submission format: a single PDF up to 5 pages (more than 5 page assignment will be automatically returned.).
Submission CSCI 598/898: Assignment #4 Assignment due: March 23 Individual assignment. Write-up submission format: a single PDF up to 5 pages (more than 5 page assignment will be automatically returned.).
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Instance-level recognition I. - Camera geometry and image alignment
 Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
E27 Computer Vision - Final Project: Creating Panoramas David Nahmias, Dan Spagnolo, Vincent Stigliani Professor Zucker Due 5/10/13
 E27 Computer Vision - Final Project: Creating Panoramas David Nahmias, Dan Spagnolo, Vincent Stigliani Professor Zucker Due 5/10/13 Sources Brown, M.; Lowe, D.G., "Recognising panoramas," Computer Vision,
E27 Computer Vision - Final Project: Creating Panoramas David Nahmias, Dan Spagnolo, Vincent Stigliani Professor Zucker Due 5/10/13 Sources Brown, M.; Lowe, D.G., "Recognising panoramas," Computer Vision,
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Announcements. Mosaics. Image Mosaics. How to do it? Basic Procedure Take a sequence of images from the same position =
 Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Improving Initial Estimations for Structure from Motion Methods
 Improving Initial Estimations for Structure from Motion Methods University of Bonn Outline Motivation Computer-Vision Basics Stereo Vision Bundle Adjustment Feature Matching Global Initial Estimation Component
Improving Initial Estimations for Structure from Motion Methods University of Bonn Outline Motivation Computer-Vision Basics Stereo Vision Bundle Adjustment Feature Matching Global Initial Estimation Component
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Feature-based methods for image matching
 Feature-based methods for image matching Bag of Visual Words approach Feature descriptors SIFT descriptor SURF descriptor Geometric consistency check Vocabulary tree Digital Image Processing: Bernd Girod,
Feature-based methods for image matching Bag of Visual Words approach Feature descriptors SIFT descriptor SURF descriptor Geometric consistency check Vocabulary tree Digital Image Processing: Bernd Girod,
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Multi-modal Registration of Visual Data. Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy
 Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
Compositing a bird's eye view mosaic
 Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Map-Enhanced UAV Image Sequence Registration and Synchronization of Multiple Image Sequences
 Map-Enhanced UAV Image Sequence Registration and Synchronization of Multiple Image Sequences Yuping Lin and Gérard Medioni Computer Science Department, University of Southern California 941 W. 37th Place,
Map-Enhanced UAV Image Sequence Registration and Synchronization of Multiple Image Sequences Yuping Lin and Gérard Medioni Computer Science Department, University of Southern California 941 W. 37th Place,
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM INTRODUCTION
 A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 231A Computer Vision (Winter 2018) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
A New Representation for Video Inspection. Fabio Viola
 A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Robust Geometry Estimation from two Images
 Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
Panoramas. Why Mosaic? Why Mosaic? Mosaics: stitching images together. Why Mosaic? Olivier Gondry. Bill Freeman Frédo Durand MIT - EECS
 Olivier Gondry 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Director of music video and commercial Special effect specialist (Morphing, rotoscoping) Today
Olivier Gondry 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Director of music video and commercial Special effect specialist (Morphing, rotoscoping) Today
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Computational Optical Imaging - Optique Numerique. -- Single and Multiple View Geometry, Stereo matching --
 Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
6.098 Digital and Computational Photography Advanced Computational Photography. Panoramas. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
An Image-Based System for Urban Navigation
 An Image-Based System for Urban Navigation Duncan Robertson and Roberto Cipolla Cambridge University Engineering Department Trumpington Street, Cambridge, CB2 1PZ, UK Abstract We describe the prototype
An Image-Based System for Urban Navigation Duncan Robertson and Roberto Cipolla Cambridge University Engineering Department Trumpington Street, Cambridge, CB2 1PZ, UK Abstract We describe the prototype
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Local features and image matching May 8 th, 2018
 Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Panoramic Image Mosaicing
 Panoramic Image Mosaicing Mrs. Hetal M.Patel 1, Asst. Prof. Pinal. J. Patel 2, Asst. Prof. Mr. Sandip G. Patel 3 1 C.S.E. Department, Government College of Engineering, Gandhinagar Gujarat Technology University,
Panoramic Image Mosaicing Mrs. Hetal M.Patel 1, Asst. Prof. Pinal. J. Patel 2, Asst. Prof. Mr. Sandip G. Patel 3 1 C.S.E. Department, Government College of Engineering, Gandhinagar Gujarat Technology University,
3D Reconstruction of a Hopkins Landmark
 3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/91/106305353.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Methods for Representing and Recognizing 3D objects
 Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Combining Appearance and Topology for Wide
 Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
SURF applied in Panorama Image Stitching
 Image Processing Theory, Tools and Applications SURF applied in Panorama Image Stitching Luo Juan 1, Oubong Gwun 2 Computer Graphics Lab, Computer Science & Computer Engineering, Chonbuk National University,
Image Processing Theory, Tools and Applications SURF applied in Panorama Image Stitching Luo Juan 1, Oubong Gwun 2 Computer Graphics Lab, Computer Science & Computer Engineering, Chonbuk National University,