10 - ARAP and Linear Blend Skinning
|
|
|
- Philomena Hawkins
- 5 years ago
- Views:
Transcription
1 10 - ARAP and Linear Blend Skinning Acknowledgements: Olga Sorkine-Hornung
2 As Rigid As Possible
3 Demo Libigl demo 405

4 As-Rigid-As-Possible Deformation Preserve shape of cells covering the surface Ask each cell i to transform rigidly by best-fitting rotation R i
5 As-Rigid-As-Possible Deformation Optimal R i is uniquely defined by, R i is a nonlinear so-called shape-matching problem, function of x solved by a 3x3 SVD
6 Optimal Rotation Rotation group

7 Shape Matching Problem
8 Shape Matching Problem
9 Shape Matching Problem

10 Shape Matching Problem
11 Shape Matching Problem Align two point sets Find a translation vector t and rotation matrix R so that
12 Shape Matching Solution Solve for translation first (w.r.t. R, p, and q) Point sets {q i } and {Rp i } have the same center of mass
13 Finding the Rotation R To find the optimal R, we bring the centroids of both point sets to the origin We want to find R that minimizes
14 Finding the Rotation R I These terms do not depend on R, so we can ignore them in the minimization
15 Finding the Rotation R
16 Finding the Rotation R R =
17 Finding the Rotation R =
18 Finding the Rotation R Take a look at the Find R that maximizes Matrix Cookbook! SVD: orthonormal matrix
19 Finding the Rotation R We want to maximize M: orthonormal matrix all entries 1

20 Finding the Rotation R Our best shot is m ii = 1, i.e. to make M = I
21 Summary of Rigid Alignment Translate the input points to the centroids Compute the covariance matrix Compute its SVD: The optimal orthonormal R is
22 Sign Correction It is possible that : sometimes reflection is the best orthonormal transform
23 Sign Correction It is possible that : sometimes reflection is the best orthonormal transform
24 Sign Correction To restrict ourselves to rotations only: take the last column of U (corresponding to the smallest singular value) and invert its sign. Why? See
25 As-Rigid-As-Possible Deformation Optimal R i is uniquely defined by, R i is a nonlinear so-called shape-matching problem, function of x solved by a 3x3 SVD
26 As-Rigid-As-Possible Deformation Total ARAP energy: sum up for all the cells i Treat x and R as separate sets of variables Simple local-global iterative optimization process Decreases the energy at each step
27 As-Rigid-As-Possible Deformation Total ARAP energy: sum up for all the cells i Local step: keep x fixed, find optimal R i per cell i Global step: keep R i fixed, solve for x quadratic minimization problem
28 As-Rigid-As-Possible Deformation Total ARAP energy: sum up for all the cells i Local step: keep x fixed, find optimal R per cell i i Global step: keep R fixed, solve for x i quadratic minimization problem The matrix L stays fixed, can pre-factorize


29 Initial Guess Can use naïve Laplacian editing initial guess 1 iteration 2 iterations initial guess 1 iterations 4 iterations
30 Initial Guess Can also use the previous frame Replace all handle vertex positions by the currently prescribed ones Fast convergence


31 Large Rotations Use previous frame as the initial guess

32 Examples
33 Discussion Nonlinear deformation that models a kind of elastic behavior Very simple to implement, no parameters to tune except number of iterations Each step is guaranteed to not increase the energy Compare with Gauss-Newton Each iteration is relatively cheap, no matrix refactorization necessary
34 Discussion Works fine on small meshes On larger meshes: slow convergence Each iteration is more expensive Need more iterations because the conditioning of the system becomes worse as the matrix grows Material stiffness depends on the cell size lots of wrinkles for fine meshes when using 1-rings as cells

35 Acceleration using Subspace Techniques Subspace created by influence weight functions for each handle Drastically reduces the number of degrees of freedom in the optimization Alec Jacobson, Ilya Baran, Ladislav Kavan, Jovan Popović, and Olga Sorkine. Fast Automatic Skinning Transformations, 2012.

36 Acceleration using Subspace Techniques Subspace created by influence weight functions for each handle Drastically reduces the number of degrees of freedom in the optimization Alec Jacobson, Ilya Baran, Ladislav Kavan, Jovan Popović, and Olga Sorkine. Fast Automatic Skinning Transformations, 2012.

37 Acceleration using Subspace Techniques Subspace created by influence weight functions for each handle Drastically reduces the number of degrees of freedom in the optimization Alec Jacobson, Ilya Baran, Ladislav Kavan, Jovan Popović, and Olga Sorkine. Fast Automatic Skinning Transformations, 2012.
38 Demo Libigl demo 406
39 Linear Blend Skinning Acknowledgements: Alec Jacobson
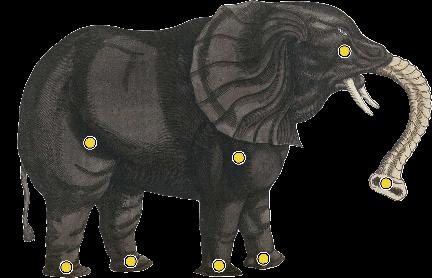

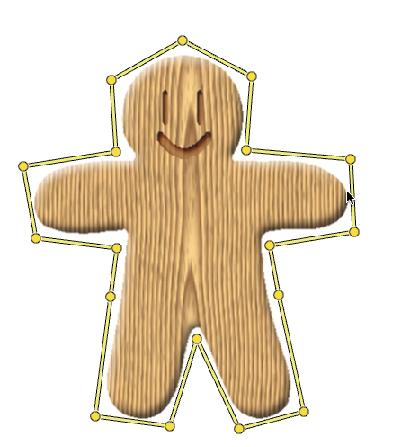
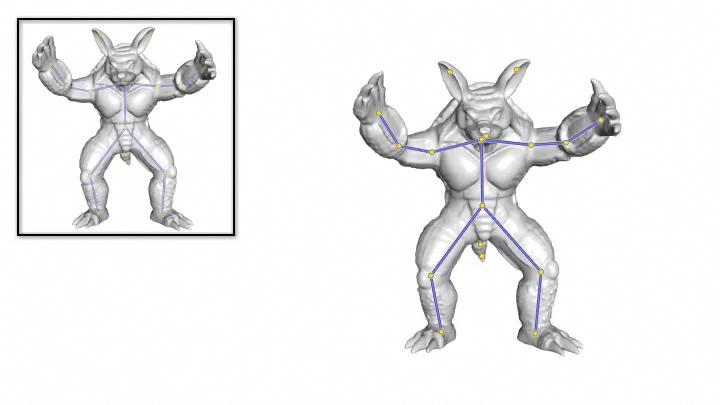
40 LBS generalizes to different handle types skeletons regions points cages
41 Linear Blend Skinning rigging preferred for its realtime performance place handles in shape
42 Linear Blend Skinning rigging preferred for its realtime performance place handles in shape paint weights
43 Linear Blend Skinning rigging preferred for its realtime performance place handles in shape paint weights deform handles


44 Linear Blend Skinning rigging preferred for its realtime performance place handles in shape paint weights deform handles
45 Linear Blend Skinning rigging preferred for its realtime performance place handles in shape paint weights deform handles




46 Challenges with LBS Weight functions w j Need intuitive, general and automatic weights Degrees of freedom T j Let the energy decide! Richness of achievable deformations Want to avoid common LBS pitfalls candy wrapper, collapses
47 Bounded Biharmonic Weights Alec Jacobson, Ilya Baran, Jovan Popović, Olga Sorkine-Hornung

48 Automatic weights that unify points, skeletons and cages

49 Weights should be smooth, shape-aware, positive and intuitive

50 Weights must be smooth everywhere, especially at handles Bounded Biharmonic Weights Extension of Harmonic Coordinates [Joshi et al. 2005]


51 Weights must be smooth everywhere, especially at handles Bounded Biharmonic Weights Extension of Harmonic Coordinates [Joshi et al. 2005]
52 Shape-awareness ensures respect of domain s features Bounded Biharmonic Weights Non-shape-aware methods e.g. [Schaefer et al. 2006]
53 Non-negative weights are necessary for intuitive response Bounded Biharmonic Weights Unconstrained biharmonic [Botsch and Kobbelt 2004]
54 Weights must maintain other simple, but important properties Handle vertices is linear along cage faces Partition of unity Interpolation of handles
55 How about w j (x 0 ) = d (x 0, H j ) 1?
56 Inverse distance methods inherently suffer from fall-off effect
57 Inverse distance methods inherently suffer from fall-off effect

58 Inverse distance methods inherently suffer from fall-off effect Approaching 0.5


59 Inverse distance methods inherently suffer from fall-off effect Inverse- distance weights BBW
60 Bounded biharmonic weights enforce properties as constraints to minimization is linear along cage faces
61 Bounded biharmonic weights enforce properties as constraints to minimization Constant inequality constraints Partition of unity is linear along cage faces
62 Bounded biharmonic weights enforce properties as constraints to minimization Constant inequality constraints Solve independently and normalize is linear along cage faces
63 Weights optimized as precomputation at bind-time is linear along cage faces FEM discretization 2D! Triangle mesh 3D! Tet mesh
64 Weights optimized as precomputation at bind-time is linear along cage faces Sparse quadratic programming with constant inequality constraints 2D! less than second per handle 3D! tens of seconds per handle

65 Some examples of BBW in action

66 Some examples of BBW in action

67 Some examples of BBW in action
68 3D Characters
69 Demo Libigl demo 403
70 Thank you
12 - Spatial And Skeletal Deformations. CSCI-GA Computer Graphics - Fall 16 - Daniele Panozzo
 12 - Spatial And Skeletal Deformations Space Deformations Space Deformation Displacement function defined on the ambient space Evaluate the function on the points of the shape embedded in the space Twist
12 - Spatial And Skeletal Deformations Space Deformations Space Deformation Displacement function defined on the ambient space Evaluate the function on the points of the shape embedded in the space Twist
Advanced Computer Graphics
 G22.2274 001, Fall 2009 Advanced Computer Graphics Project details and tools 1 Project Topics Computer Animation Geometric Modeling Computational Photography Image processing 2 Optimization All projects
G22.2274 001, Fall 2009 Advanced Computer Graphics Project details and tools 1 Project Topics Computer Animation Geometric Modeling Computational Photography Image processing 2 Optimization All projects
Computational Design. Stelian Coros
 Computational Design Stelian Coros Schedule for presentations February 3 5 10 12 17 19 24 26 March 3 5 10 12 17 19 24 26 30 April 2 7 9 14 16 21 23 28 30 Send me: ASAP: 3 choices for dates + approximate
Computational Design Stelian Coros Schedule for presentations February 3 5 10 12 17 19 24 26 March 3 5 10 12 17 19 24 26 30 April 2 7 9 14 16 21 23 28 30 Send me: ASAP: 3 choices for dates + approximate
Introduction to Computer Graphics. Animation (1) May 19, 2016 Kenshi Takayama
 May 19, 2016 Kenshi Takayama") Introduction to Computer Graphics Animation (1) May 19, 2016 Kenshi Takayama Skeleton-based animation Simple Intuitive Low comp. cost https://www.youtube.com/watch?v=dsonab58qva 2 Representing a pose using
Introduction to Computer Graphics Animation (1) May 19, 2016 Kenshi Takayama Skeleton-based animation Simple Intuitive Low comp. cost https://www.youtube.com/watch?v=dsonab58qva 2 Representing a pose using
CS 523: Computer Graphics, Spring Shape Modeling. Skeletal deformation. Andrew Nealen, Rutgers, /12/2011 1
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Skeletal deformation 4/12/2011 1 Believable character animation Computers games and movies Skeleton: intuitive, low-dimensional subspace Clip courtesy
CS 523: Computer Graphics, Spring 2011 Shape Modeling Skeletal deformation 4/12/2011 1 Believable character animation Computers games and movies Skeleton: intuitive, low-dimensional subspace Clip courtesy
CS 775: Advanced Computer Graphics. Lecture 4: Skinning
 CS 775: Advanced Computer Graphics Lecture 4: http://www.okino.com/conv/skinning.htm Binding Binding Always done in a standard rest or bind pose. Binding Always done in a standard rest or bind pose. Associate
CS 775: Advanced Computer Graphics Lecture 4: http://www.okino.com/conv/skinning.htm Binding Binding Always done in a standard rest or bind pose. Binding Always done in a standard rest or bind pose. Associate
Skeletal deformation
 CS 523: Computer Graphics, Spring 2009 Shape Modeling Skeletal deformation 4/22/2009 1 Believable character animation Computers games and movies Skeleton: intuitive, low dimensional subspace Clip courtesy
CS 523: Computer Graphics, Spring 2009 Shape Modeling Skeletal deformation 4/22/2009 1 Believable character animation Computers games and movies Skeleton: intuitive, low dimensional subspace Clip courtesy
Locally Injective Mappings
 8/6/ Locally Injective Mappings Christian Schüller 1 Ladislav Kavan 2 Daniele Panozzo 1 Olga Sorkine-Hornung 1 1 ETH Zurich 2 University of Pennsylvania Locally Injective Mappings Popular tasks in geometric
8/6/ Locally Injective Mappings Christian Schüller 1 Ladislav Kavan 2 Daniele Panozzo 1 Olga Sorkine-Hornung 1 1 ETH Zurich 2 University of Pennsylvania Locally Injective Mappings Popular tasks in geometric
Animation. Motion over time
 Animation Animation Motion over time Animation Motion over time Usually focus on character animation but environment is often also animated trees, water, fire, explosions, Animation Motion over time Usually
Animation Animation Motion over time Animation Motion over time Usually focus on character animation but environment is often also animated trees, water, fire, explosions, Animation Motion over time Usually
Def De orma f tion orma Disney/Pixar
 Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Stretchable and Twistable Bones for Skeletal Shape Deformation
 Stretchable and Twistable Bones for Skeletal Shape Deformation Alec Jacobson Olga Sorkine New York University & ETH Zurich Original LBS DQS STBS Figure 1: Left to right: the Beast model is rigged to a
Stretchable and Twistable Bones for Skeletal Shape Deformation Alec Jacobson Olga Sorkine New York University & ETH Zurich Original LBS DQS STBS Figure 1: Left to right: the Beast model is rigged to a
Character animation Christian Miller CS Fall 2011
 Character animation Christian Miller CS 354 - Fall 2011 Exam 2 grades Avg = 74.4, std. dev. = 14.4, min = 42, max = 99 Characters Everything is important in an animation But people are especially sensitive
Character animation Christian Miller CS 354 - Fall 2011 Exam 2 grades Avg = 74.4, std. dev. = 14.4, min = 42, max = 99 Characters Everything is important in an animation But people are especially sensitive
Animation of 3D surfaces
 Animation of 3D surfaces 2013-14 Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible
Animation of 3D surfaces 2013-14 Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible
Rigging / Skinning. based on Taku Komura, Jehee Lee and Charles B.Own's slides
 Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Skeleton Based As-Rigid-As-Possible Volume Modeling
 Skeleton Based As-Rigid-As-Possible Volume Modeling Computer Science Department, Rutgers University As-rigid-as-possible (ARAP) shape modeling is a popular technique to obtain natural deformations. There
Skeleton Based As-Rigid-As-Possible Volume Modeling Computer Science Department, Rutgers University As-rigid-as-possible (ARAP) shape modeling is a popular technique to obtain natural deformations. There
T6: Position-Based Simulation Methods in Computer Graphics. Jan Bender Miles Macklin Matthias Müller
 T6: Position-Based Simulation Methods in Computer Graphics Jan Bender Miles Macklin Matthias Müller Jan Bender Organizer Professor at the Visual Computing Institute at Aachen University Research topics
T6: Position-Based Simulation Methods in Computer Graphics Jan Bender Miles Macklin Matthias Müller Jan Bender Organizer Professor at the Visual Computing Institute at Aachen University Research topics
A skeleton/cage hybrid paradigm for digital animation
 A skeleton/cage hybrid paradigm for digital animation Fabrizio Corda 1 1 Università degli studi di Cagliari Abstract. Digital animators require simple tools and techniques that allow them to create computer
A skeleton/cage hybrid paradigm for digital animation Fabrizio Corda 1 1 Università degli studi di Cagliari Abstract. Digital animators require simple tools and techniques that allow them to create computer
CSE 554 Lecture 7: Deformation II
 CSE 554 Lecture 7: Deformation II Fall 2011 CSE554 Deformation II Slide 1 Review Rigid-body alignment Non-rigid deformation Intrinsic methods: deforming the boundary points An optimization problem Minimize
CSE 554 Lecture 7: Deformation II Fall 2011 CSE554 Deformation II Slide 1 Review Rigid-body alignment Non-rigid deformation Intrinsic methods: deforming the boundary points An optimization problem Minimize
Geometric Modeling and Processing
 Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
Shape Deformation via Interior RBF
 Shape Deformation via Interior RBF Zohar Levi and David Levin (a) Source (b) IRBF deformed poses Figure 1: Troll. (b) IRBF deformation with interior distances. Abstract We present a new framework for real-time
Shape Deformation via Interior RBF Zohar Levi and David Levin (a) Source (b) IRBF deformed poses Figure 1: Troll. (b) IRBF deformation with interior distances. Abstract We present a new framework for real-time
05 Mesh Animation. Steve Marschner CS5625 Spring 2016
 05 Mesh Animation Steve Marschner CS5625 Spring 2016 Basic surface deformation methods Blend shapes: make a mesh by combining several meshes Mesh skinning: deform a mesh based on an underlying skeleton
05 Mesh Animation Steve Marschner CS5625 Spring 2016 Basic surface deformation methods Blend shapes: make a mesh by combining several meshes Mesh skinning: deform a mesh based on an underlying skeleton
An Intuitive Framework for Real-Time Freeform Modeling
 An Intuitive Framework for Real-Time Freeform Modeling Leif Kobbelt Shape Deformation Complex shapes Complex deformations User Interaction Very limited user interface 2D screen & mouse Intuitive metaphor
An Intuitive Framework for Real-Time Freeform Modeling Leif Kobbelt Shape Deformation Complex shapes Complex deformations User Interaction Very limited user interface 2D screen & mouse Intuitive metaphor
Assignment 5: Shape Deformation
 CSCI-GA.3033-018 - Geometric Modeling Assignment 5: Shape Deformation Goal of this exercise In this exercise, you will implement an algorithm to interactively deform 3D models. You will construct a two-level
CSCI-GA.3033-018 - Geometric Modeling Assignment 5: Shape Deformation Goal of this exercise In this exercise, you will implement an algorithm to interactively deform 3D models. You will construct a two-level
Skinning Mesh Animations
 Doug L. James, Christopher D. Twigg Carnegie Mellon University presented by Johannes Schmid 1 Outline Introduction & Motivation Overview & Details Results Discussion 2 Introduction Mesh sequence: 3 General
Doug L. James, Christopher D. Twigg Carnegie Mellon University presented by Johannes Schmid 1 Outline Introduction & Motivation Overview & Details Results Discussion 2 Introduction Mesh sequence: 3 General
Mesh-Based Inverse Kinematics
 CS468, Wed Nov 9 th 2005 Mesh-Based Inverse Kinematics R. W. Sumner, M. Zwicker, C. Gotsman, J. Popović SIGGRAPH 2005 The problem 1 General approach Learn from experience... 2 As-rigid-as-possible shape
CS468, Wed Nov 9 th 2005 Mesh-Based Inverse Kinematics R. W. Sumner, M. Zwicker, C. Gotsman, J. Popović SIGGRAPH 2005 The problem 1 General approach Learn from experience... 2 As-rigid-as-possible shape
Advanced Computer Graphics
 G22.2274 001, Fall 2010 Advanced Computer Graphics Project details and tools 1 Projects Details of each project are on the website under Projects Please review all the projects and come see me if you would
G22.2274 001, Fall 2010 Advanced Computer Graphics Project details and tools 1 Projects Details of each project are on the website under Projects Please review all the projects and come see me if you would
COMPUTER ANIMATION 3 KEYFRAME ANIMATION, RIGGING, SKINNING AND CHARACTER ANIMATION. Rémi Ronfard, Animation, M2R MOSIG
 COMPUTER ANIMATION 3 KEYFRAME ANIMATION, RIGGING, SKINNING AND CHARACTER ANIMATION Rémi Ronfard, Animation, M2R MOSIG 2 Outline Principles of animation Keyframe interpolation Rigging, skinning and walking
COMPUTER ANIMATION 3 KEYFRAME ANIMATION, RIGGING, SKINNING AND CHARACTER ANIMATION Rémi Ronfard, Animation, M2R MOSIG 2 Outline Principles of animation Keyframe interpolation Rigging, skinning and walking
Scanning Real World Objects without Worries 3D Reconstruction
 Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Animation of 3D surfaces.
 Animation of 3D surfaces Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible =
Animation of 3D surfaces Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible =
Introduction to Computer Graphics. Image Processing (1) June 8, 2017 Kenshi Takayama
 June 8, 2017 Kenshi Takayama") Introduction to Computer Graphics Image Processing (1) June 8, 2017 Kenshi Takayama Today s topics Edge-aware image processing Gradient-domain image processing 2 Image smoothing using Gaussian Filter Smoothness
Introduction to Computer Graphics Image Processing (1) June 8, 2017 Kenshi Takayama Today s topics Edge-aware image processing Gradient-domain image processing 2 Image smoothing using Gaussian Filter Smoothness
Geometric Modeling Assignment 5: Shape Deformation
 Geometric Modeling Assignment 5: Shape Deformation Acknowledgements: Olga Diamanti, Julian Panetta Shape Deformation Step 1: Select and Deform Handle Regions Draw vertex selection with mouse H 2 Move one
Geometric Modeling Assignment 5: Shape Deformation Acknowledgements: Olga Diamanti, Julian Panetta Shape Deformation Step 1: Select and Deform Handle Regions Draw vertex selection with mouse H 2 Move one
arxiv: v1 [cs.gr] 14 Aug 2014
![arxiv: v1 [cs.gr] 14 Aug 2014](/thumbs/91/106395396.jpg "arxiv: v1 [cs.gr] 14 Aug 2014") Regularized Harmonic Surface Deformation Yeara Kozlov, Janick Martinez Esturo, Hans-Peter Seidel, and Tino Weinkauf Max Planck Institute for Informatics, Germany {ykozlov,janick,hpseidel,weinkauf}@mpi-inf.mpg.de
Regularized Harmonic Surface Deformation Yeara Kozlov, Janick Martinez Esturo, Hans-Peter Seidel, and Tino Weinkauf Max Planck Institute for Informatics, Germany {ykozlov,janick,hpseidel,weinkauf}@mpi-inf.mpg.de
Fast Automatic Skinning Transformations
 Fast Automatic Skinning Transformations Alec Jacobson 1 Ilya Baran 2 Ladislav Kavan 1 Jovan Popović 3 Olga Sorkine 1 1 ETH Zurich 2 Disney Research, Zurich 3 Adobe Systems, Inc. Figure 1: We present a
Fast Automatic Skinning Transformations Alec Jacobson 1 Ilya Baran 2 Ladislav Kavan 1 Jovan Popović 3 Olga Sorkine 1 1 ETH Zurich 2 Disney Research, Zurich 3 Adobe Systems, Inc. Figure 1: We present a
Animations. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Kavita Bala
 Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Invariant shape similarity. Invariant shape similarity. Invariant similarity. Equivalence. Equivalence. Equivalence. Equal SIMILARITY TRANSFORMATION
 1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
Image Coding with Active Appearance Models
 Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Smooth Rotation Enhanced As-Rigid-As-Possible Mesh Animation
 TVCG-2013-10-0283 1 Smooth Rotation Enhanced As-Rigid-As-Possible Mesh Animation Zohar Levi and Craig Gotsman Abstract In recent years, the As-Rigid-As-Possible (ARAP) shape deformation and shape interpolation
TVCG-2013-10-0283 1 Smooth Rotation Enhanced As-Rigid-As-Possible Mesh Animation Zohar Levi and Craig Gotsman Abstract In recent years, the As-Rigid-As-Possible (ARAP) shape deformation and shape interpolation
CSE452 Computer Graphics
 CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
Animating Characters in Pictures
 Animating Characters in Pictures Shih-Chiang Dai jeffrey@cmlab.csie.ntu.edu.tw Chun-Tse Hsiao hsiaochm@cmlab.csie.ntu.edu.tw Bing-Yu Chen robin@ntu.edu.tw ABSTRACT Animating pictures is an interesting
Animating Characters in Pictures Shih-Chiang Dai jeffrey@cmlab.csie.ntu.edu.tw Chun-Tse Hsiao hsiaochm@cmlab.csie.ntu.edu.tw Bing-Yu Chen robin@ntu.edu.tw ABSTRACT Animating pictures is an interesting
Real-Time Shape Editing using Radial Basis Functions
 Real-Time Shape Editing using Radial Basis Functions, Leif Kobbelt RWTH Aachen Boundary Constraint Modeling Prescribe irregular constraints Vertex positions Constrained energy minimization Optimal fairness
Real-Time Shape Editing using Radial Basis Functions, Leif Kobbelt RWTH Aachen Boundary Constraint Modeling Prescribe irregular constraints Vertex positions Constrained energy minimization Optimal fairness
Easy modeling generate new shapes by deforming existing ones
 Deformation I Deformation Motivation Easy modeling generate new shapes by deforming existing ones Motivation Easy modeling generate new shapes by deforming existing ones Motivation Character posing for
Deformation I Deformation Motivation Easy modeling generate new shapes by deforming existing ones Motivation Easy modeling generate new shapes by deforming existing ones Motivation Character posing for
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
计算机图形学. Computer Graphics 刘利刚.
 计算机图形学 Computer Graphics 刘利刚 lgliu@ustc.edu.cn http://staff.ustc.edu.cn/~lgliu Computer Animation Skinning and Enveloping The slide are from Durand from MIT. Before getting started One more word about
计算机图形学 Computer Graphics 刘利刚 lgliu@ustc.edu.cn http://staff.ustc.edu.cn/~lgliu Computer Animation Skinning and Enveloping The slide are from Durand from MIT. Before getting started One more word about
08 - Designing Approximating Curves
 08 - Designing Approximating Curves Acknowledgement: Olga Sorkine-Hornung, Alexander Sorkine-Hornung, Ilya Baran Last time Interpolating curves Monomials Lagrange Hermite Different control types Polynomials
08 - Designing Approximating Curves Acknowledgement: Olga Sorkine-Hornung, Alexander Sorkine-Hornung, Ilya Baran Last time Interpolating curves Monomials Lagrange Hermite Different control types Polynomials
CMSC 425: Lecture 10 Skeletal Animation and Skinning
 CMSC 425: Lecture 10 Skeletal Animation and Skinning Reading: Chapt 11 of Gregory, Game Engine Architecture. Recap: Last time we introduced the principal elements of skeletal models and discussed forward
CMSC 425: Lecture 10 Skeletal Animation and Skinning Reading: Chapt 11 of Gregory, Game Engine Architecture. Recap: Last time we introduced the principal elements of skeletal models and discussed forward
Deformation II. Disney/Pixar
 Deformation II Disney/Pixar 1 Space Deformation Deformation function on ambient space f : n n Shape S deformed by applying f to points of S S = f (S) f (x,y)=(2x,y) S S 2 Motivation Can be applied to any
Deformation II Disney/Pixar 1 Space Deformation Deformation function on ambient space f : n n Shape S deformed by applying f to points of S S = f (S) f (x,y)=(2x,y) S S 2 Motivation Can be applied to any
Efficient Collision Detection for Example-Based Deformable Bodies
 Efficient Collision Detection for Example-Based Deformable Bodies ABSTRACT Ben Jones University of Utah benjones@cs.utah.edu Tamar Shinar University of California, Riverside We introduce a new collision
Efficient Collision Detection for Example-Based Deformable Bodies ABSTRACT Ben Jones University of Utah benjones@cs.utah.edu Tamar Shinar University of California, Riverside We introduce a new collision
Animation. CS 465 Lecture 22
 Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
CSE 554 Lecture 6: Fairing and Simplification
 CSE 554 Lecture 6: Fairing and Simplification Fall 2012 CSE554 Fairing and simplification Slide 1 Review Iso-contours in grayscale images and volumes Piece-wise linear representations Polylines (2D) and
CSE 554 Lecture 6: Fairing and Simplification Fall 2012 CSE554 Fairing and simplification Slide 1 Review Iso-contours in grayscale images and volumes Piece-wise linear representations Polylines (2D) and
Multi-level Partition of Unity Implicits
 Multi-level Partition of Unity Implicits Diego Salume October 23 rd, 2013 Author: Ohtake, et.al. Overview Goal: Use multi-level partition of unity (MPU) implicit surface to construct surface models. 3
Multi-level Partition of Unity Implicits Diego Salume October 23 rd, 2013 Author: Ohtake, et.al. Overview Goal: Use multi-level partition of unity (MPU) implicit surface to construct surface models. 3
Additional Key Words and Phrases: character animation, skinning, projective dynamics
 Projective Skinning MARTIN KOMARITZAN, Computer Graphics Group, Bielefeld University MARIO BOTSCH, Computer Graphics Group, Bielefeld University 12 Fig. 1. Projective skinning avoids the artifacts of Linear
Projective Skinning MARTIN KOMARITZAN, Computer Graphics Group, Bielefeld University MARIO BOTSCH, Computer Graphics Group, Bielefeld University 12 Fig. 1. Projective skinning avoids the artifacts of Linear
FEM Convergence Requirements
 19 FEM Convergence Requirements IFEM Ch 19 Slide 1 Convergence Requirements for Finite Element Discretization Convergence: discrete (FEM) solution approaches the analytical (math model) solution in some
19 FEM Convergence Requirements IFEM Ch 19 Slide 1 Convergence Requirements for Finite Element Discretization Convergence: discrete (FEM) solution approaches the analytical (math model) solution in some
Fast and Reliable Example-Based Mesh IK for Stylized Deformations
 Fast and Reliable Example-Based Mesh IK for Stylized Deformations Kevin Wampler Adobe Systems Inc. Abstract Example-based shape deformation allows a mesh to be easily manipulated or animated with simple
Fast and Reliable Example-Based Mesh IK for Stylized Deformations Kevin Wampler Adobe Systems Inc. Abstract Example-based shape deformation allows a mesh to be easily manipulated or animated with simple
Robust Human Body Shape and Pose Tracking
 Robust Human Body Shape and Pose Tracking Chun-Hao Huang 1 Edmond Boyer 2 Slobodan Ilic 1 1 Technische Universität München 2 INRIA Grenoble Rhône-Alpes Marker-based motion capture (mocap.) Adventages:
Robust Human Body Shape and Pose Tracking Chun-Hao Huang 1 Edmond Boyer 2 Slobodan Ilic 1 1 Technische Universität München 2 INRIA Grenoble Rhône-Alpes Marker-based motion capture (mocap.) Adventages:
Large Mesh Deformation Using the Volumetric Graph Laplacian
 Large Mesh Deformation Using the Volumetric Graph Laplacian Kun Zhou1 Jin Huang2 John Snyder3 Xinguo Liu1 Hujun Bao2 Baining Guo1 Heung-Yeung Shum1 1 Microsoft Research Asia 2 Zhejiang University 3 Microsoft
Large Mesh Deformation Using the Volumetric Graph Laplacian Kun Zhou1 Jin Huang2 John Snyder3 Xinguo Liu1 Hujun Bao2 Baining Guo1 Heung-Yeung Shum1 1 Microsoft Research Asia 2 Zhejiang University 3 Microsoft
Today. Golden section, discussion of error Newton s method. Newton s method, steepest descent, conjugate gradient
 Optimization Last time Root finding: definition, motivation Algorithms: Bisection, false position, secant, Newton-Raphson Convergence & tradeoffs Example applications of Newton s method Root finding in
Optimization Last time Root finding: definition, motivation Algorithms: Bisection, false position, secant, Newton-Raphson Convergence & tradeoffs Example applications of Newton s method Root finding in
THIS paper presents the recent advances in mesh deformation
 1 On Linear Variational Surface Deformation Methods Mario Botsch Computer Graphics Laboratory ETH Zurich Olga Sorkine Computer Graphics Group TU Berlin Abstract This survey reviews the recent advances
1 On Linear Variational Surface Deformation Methods Mario Botsch Computer Graphics Laboratory ETH Zurich Olga Sorkine Computer Graphics Group TU Berlin Abstract This survey reviews the recent advances
05 - Surfaces. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Daniele Panozzo
 05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
Deformation Sensitive Decimation
 Deformation Sensitive Decimation Alex Mohr Michael Gleicher University of Wisconsin, Madison Abstract In computer graphics, many automatic methods for simplifying polygonal meshes have been developed.
Deformation Sensitive Decimation Alex Mohr Michael Gleicher University of Wisconsin, Madison Abstract In computer graphics, many automatic methods for simplifying polygonal meshes have been developed.
Deformation Transfer for Triangle Meshes
 Deformation Transfer for Triangle Meshes a Paper (SIGGRAPH 2004) by Robert W. Sumner & Jovan Popovic presented by Roni Oeschger Deformation Transfer Source deformed Target deformed 1 Outline of my presentation
Deformation Transfer for Triangle Meshes a Paper (SIGGRAPH 2004) by Robert W. Sumner & Jovan Popovic presented by Roni Oeschger Deformation Transfer Source deformed Target deformed 1 Outline of my presentation
AMS527: Numerical Analysis II
 AMS527: Numerical Analysis II A Brief Overview of Finite Element Methods Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao SUNY Stony Brook AMS527: Numerical Analysis II 1 / 25 Overview Basic concepts Mathematical
AMS527: Numerical Analysis II A Brief Overview of Finite Element Methods Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao SUNY Stony Brook AMS527: Numerical Analysis II 1 / 25 Overview Basic concepts Mathematical
Local Barycentric Coordinates
 Local Barycentric Coordinates Juyong Zhang Bailin Deng Zishun Liu Giuseppe Patanè Sofien Bouaziz Kai Hormann Ligang Liu USTC EPFL USTC CNR-IMATI EPFL USI USTC Introduction Given a point p inside a polygon
Local Barycentric Coordinates Juyong Zhang Bailin Deng Zishun Liu Giuseppe Patanè Sofien Bouaziz Kai Hormann Ligang Liu USTC EPFL USTC CNR-IMATI EPFL USI USTC Introduction Given a point p inside a polygon
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Chapter 7 Practical Considerations in Modeling. Chapter 7 Practical Considerations in Modeling
 CIVL 7/8117 1/43 Chapter 7 Learning Objectives To present concepts that should be considered when modeling for a situation by the finite element method, such as aspect ratio, symmetry, natural subdivisions,
CIVL 7/8117 1/43 Chapter 7 Learning Objectives To present concepts that should be considered when modeling for a situation by the finite element method, such as aspect ratio, symmetry, natural subdivisions,
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
Computing and Processing Correspondences with Functional Maps
 Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Shape articulation transforms a lifeless geometric
 Editor: Jim Foley Breathing Life into Shapes Alec Jacobson Columbia University Shape articulation transforms a lifeless geometric object into a vibrant character. Given a sufficient shape deformation interface,
Editor: Jim Foley Breathing Life into Shapes Alec Jacobson Columbia University Shape articulation transforms a lifeless geometric object into a vibrant character. Given a sufficient shape deformation interface,
Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia
 Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia 2008 1 Non-Convex Non Convex Boundary Convex boundary creates significant distortion Free boundary is better 2 Fixed
Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia 2008 1 Non-Convex Non Convex Boundary Convex boundary creates significant distortion Free boundary is better 2 Fixed
Pose Space Deformation A unified Approach to Shape Interpolation and Skeleton-Driven Deformation
 Pose Space Deformation A unified Approach to Shape Interpolation and Skeleton-Driven Deformation J.P. Lewis Matt Cordner Nickson Fong Presented by 1 Talk Outline Character Animation Overview Problem Statement
Pose Space Deformation A unified Approach to Shape Interpolation and Skeleton-Driven Deformation J.P. Lewis Matt Cordner Nickson Fong Presented by 1 Talk Outline Character Animation Overview Problem Statement
Multigrid Pattern. I. Problem. II. Driving Forces. III. Solution
 Multigrid Pattern I. Problem Problem domain is decomposed into a set of geometric grids, where each element participates in a local computation followed by data exchanges with adjacent neighbors. The grids
Multigrid Pattern I. Problem Problem domain is decomposed into a set of geometric grids, where each element participates in a local computation followed by data exchanges with adjacent neighbors. The grids
ixcube 4-10 Brief introduction for membrane and cable systems.
 ixcube 4-10 Brief introduction for membrane and cable systems. ixcube is the evolution of 20 years of R&D in the field of membrane structures so it takes a while to understand the basic features. You must
ixcube 4-10 Brief introduction for membrane and cable systems. ixcube is the evolution of 20 years of R&D in the field of membrane structures so it takes a while to understand the basic features. You must
(Sparse) Linear Solvers
 Linear Solvers") (Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 2 Don t you just invert
(Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 2 Don t you just invert
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
(Sparse) Linear Solvers
 Linear Solvers") (Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 1 Don t you just invert
(Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 1 Don t you just invert
Mesh Puppetry: Cascading Optimization of Mesh Deformation with Inverse Kinematics
 Mesh Puppetry: Cascading Optimization of Mesh Deformation with Inverse Kinematics Xiaohan Shi Kun Zhou Yiying Tong Mathieu Desbrun Hujun Bao Baining Guo State Key Lab of CAD&CG, Zhejiang University Microsoft
Mesh Puppetry: Cascading Optimization of Mesh Deformation with Inverse Kinematics Xiaohan Shi Kun Zhou Yiying Tong Mathieu Desbrun Hujun Bao Baining Guo State Key Lab of CAD&CG, Zhejiang University Microsoft
Introduction to Computer Graphics. Animation (2) May 26, 2016 Kenshi Takayama
 May 26, 2016 Kenshi Takayama") Introduction to Computer Graphics Animation (2) May 26, 2016 Kenshi Takayama Physically-based deformations 2 Simple example: single mass & spring in 1D Mass m, position x, spring coefficient k, rest length
Introduction to Computer Graphics Animation (2) May 26, 2016 Kenshi Takayama Physically-based deformations 2 Simple example: single mass & spring in 1D Mass m, position x, spring coefficient k, rest length
Surfaces, meshes, and topology
 Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Solid and shell elements
 Solid and shell elements Theodore Sussman, Ph.D. ADINA R&D, Inc, 2016 1 Overview 2D and 3D solid elements Types of elements Effects of element distortions Incompatible modes elements u/p elements for incompressible
Solid and shell elements Theodore Sussman, Ph.D. ADINA R&D, Inc, 2016 1 Overview 2D and 3D solid elements Types of elements Effects of element distortions Incompatible modes elements u/p elements for incompressible
Module 1 Lecture Notes 2. Optimization Problem and Model Formulation
 Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
What is Multigrid? They have been extended to solve a wide variety of other problems, linear and nonlinear.
 AMSC 600/CMSC 760 Fall 2007 Solution of Sparse Linear Systems Multigrid, Part 1 Dianne P. O Leary c 2006, 2007 What is Multigrid? Originally, multigrid algorithms were proposed as an iterative method to
AMSC 600/CMSC 760 Fall 2007 Solution of Sparse Linear Systems Multigrid, Part 1 Dianne P. O Leary c 2006, 2007 What is Multigrid? Originally, multigrid algorithms were proposed as an iterative method to
Elasticity-Inspired Deformers for Character Articulation
 ACM SIGGRAPH Asia 202, Singapore, November 29 December, 202 Elasticity-Inspired Deformers for Character Articulation Ladislav Kavan ETH Zurich (c) (b) (a) Olga Sorkine (d) (e) method BBW method Figure
ACM SIGGRAPH Asia 202, Singapore, November 29 December, 202 Elasticity-Inspired Deformers for Character Articulation Ladislav Kavan ETH Zurich (c) (b) (a) Olga Sorkine (d) (e) method BBW method Figure
2.7 Cloth Animation. Jacobs University Visualization and Computer Graphics Lab : Advanced Graphics - Chapter 2 123
 2.7 Cloth Animation 320491: Advanced Graphics - Chapter 2 123 Example: Cloth draping Image Michael Kass 320491: Advanced Graphics - Chapter 2 124 Cloth using mass-spring model Network of masses and springs
2.7 Cloth Animation 320491: Advanced Graphics - Chapter 2 123 Example: Cloth draping Image Michael Kass 320491: Advanced Graphics - Chapter 2 124 Cloth using mass-spring model Network of masses and springs
Handle-Aware Isolines for Scalable Shape Editing
 Handle-Aware Isolines for Scalable Shape Editing Oscar Kin-Chung Au Hongbo Fu Chiew-Lan Tai Hong Kong University of Science and Technology Daniel Cohen-Or Tel Aviv University Figure 1: Our method uses
Handle-Aware Isolines for Scalable Shape Editing Oscar Kin-Chung Au Hongbo Fu Chiew-Lan Tai Hong Kong University of Science and Technology Daniel Cohen-Or Tel Aviv University Figure 1: Our method uses
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Question 2: Linear algebra and transformations matrices rotation vectors linear transformation T=U*D*VT
 You must answer all questions. For full credit, an answer must be both correct and well-presented (clear and concise). If you feel a question is ambiguous, state any assumptions that you need to make.
You must answer all questions. For full credit, an answer must be both correct and well-presented (clear and concise). If you feel a question is ambiguous, state any assumptions that you need to make.
As-Rigid-As-Possible Shape Manipulation
 As-Rigid-As-Possible Shape Manipulation T. Igarashi 1, T. Mascovich 2 J. F. Hughes 3 1 The University of Tokyo 2 Brown University 3 PRESTO, JST SIGGRAPH 2005 Presented by: Prabin Bariya Interactive shape
As-Rigid-As-Possible Shape Manipulation T. Igarashi 1, T. Mascovich 2 J. F. Hughes 3 1 The University of Tokyo 2 Brown University 3 PRESTO, JST SIGGRAPH 2005 Presented by: Prabin Bariya Interactive shape
Calculation of initial pretension for a cable-stayed bridge using Cable Force Tuning function in midas Civil
 Calculation of initial pretension for a cable-stayed bridge using Cable Force Tuning function in midas Civil Revision Date : 2013.05.13 Program Version : Civil2013 v2.1 00. Contents 01. Overview 3 02.
Calculation of initial pretension for a cable-stayed bridge using Cable Force Tuning function in midas Civil Revision Date : 2013.05.13 Program Version : Civil2013 v2.1 00. Contents 01. Overview 3 02.
CageIK: Dual-Laplacian Cage-Based Inverse Kinematics
 CageIK: Dual-Laplacian Cage-Based Inverse Kinematics Yann Savoye and Jean-Sébastien Franco LaBRI-INRIA Sud-Ouest, University of Bordeaux {yann.savoye,jean-sebastien.franco}@inria.fr Abstract. Cage-based
CageIK: Dual-Laplacian Cage-Based Inverse Kinematics Yann Savoye and Jean-Sébastien Franco LaBRI-INRIA Sud-Ouest, University of Bordeaux {yann.savoye,jean-sebastien.franco}@inria.fr Abstract. Cage-based
Introduction to Multigrid and its Parallelization
 Introduction to Multigrid and its Parallelization! Thomas D. Economon Lecture 14a May 28, 2014 Announcements 2 HW 1 & 2 have been returned. Any questions? Final projects are due June 11, 5 pm. If you are
Introduction to Multigrid and its Parallelization! Thomas D. Economon Lecture 14a May 28, 2014 Announcements 2 HW 1 & 2 have been returned. Any questions? Final projects are due June 11, 5 pm. If you are
Finite Element Method. Chapter 7. Practical considerations in FEM modeling
 Finite Element Method Chapter 7 Practical considerations in FEM modeling Finite Element Modeling General Consideration The following are some of the difficult tasks (or decisions) that face the engineer
Finite Element Method Chapter 7 Practical considerations in FEM modeling Finite Element Modeling General Consideration The following are some of the difficult tasks (or decisions) that face the engineer
Fracture & Tetrahedral Models
 Pop Worksheet! Teams of 2. Hand in to Jeramey after we discuss. What are the horizontal and face velocities after 1, 2, and many iterations of divergence adjustment for an incompressible fluid? Fracture
Pop Worksheet! Teams of 2. Hand in to Jeramey after we discuss. What are the horizontal and face velocities after 1, 2, and many iterations of divergence adjustment for an incompressible fluid? Fracture
Motion Capture & Simulation
 Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Discrete Geometry Processing
 Non Convex Boundary Convex boundary creates significant distortion Free boundary is better Some slides from the Mesh Parameterization Course (Siggraph Asia 008) 1 Fixed vs Free Boundary Fixed vs Free Boundary
Non Convex Boundary Convex boundary creates significant distortion Free boundary is better Some slides from the Mesh Parameterization Course (Siggraph Asia 008) 1 Fixed vs Free Boundary Fixed vs Free Boundary
Shape Modeling with Point-Sampled Geometry
 Shape Modeling with Point-Sampled Geometry Mark Pauly Richard Keiser Leif Kobbelt Markus Gross ETH Zürich ETH Zürich RWTH Aachen ETH Zürich Motivation Surface representations Explicit surfaces (B-reps)
Shape Modeling with Point-Sampled Geometry Mark Pauly Richard Keiser Leif Kobbelt Markus Gross ETH Zürich ETH Zürich RWTH Aachen ETH Zürich Motivation Surface representations Explicit surfaces (B-reps)
Surgery Simulation and Planning
 Surgery Simulation and Planning S. H. Martin Roth Dr. Rolf M. Koch Daniel Bielser Prof. Dr. Markus Gross Facial surgery project in collaboration with Prof. Dr. Dr. H. Sailer, University Hospital Zurich,
Surgery Simulation and Planning S. H. Martin Roth Dr. Rolf M. Koch Daniel Bielser Prof. Dr. Markus Gross Facial surgery project in collaboration with Prof. Dr. Dr. H. Sailer, University Hospital Zurich,
Alec Jacobson Research Statement
 Alec Jacobson Research Statement My work in geometry processing makes sense of existing geometric data and provides interfaces to put that data to further use. Barriers stand between geometric data and
Alec Jacobson Research Statement My work in geometry processing makes sense of existing geometric data and provides interfaces to put that data to further use. Barriers stand between geometric data and
Graphical Models. Robust mesh editing using Laplacian coordinates. Shaoting Zhang, Junzhou Huang, Dimitris N. Metaxas. abstract
 Graphical Models 73 (2010) 10 19 Contents lists available at ScienceDirect Graphical Models journal homepage: www.elsevier.com/locate/gmod Robust mesh editing using Laplacian coordinates Shaoting Zhang,
Graphical Models 73 (2010) 10 19 Contents lists available at ScienceDirect Graphical Models journal homepage: www.elsevier.com/locate/gmod Robust mesh editing using Laplacian coordinates Shaoting Zhang,
CHAPTER 1. Introduction
 ME 475: Computer-Aided Design of Structures 1-1 CHAPTER 1 Introduction 1.1 Analysis versus Design 1.2 Basic Steps in Analysis 1.3 What is the Finite Element Method? 1.4 Geometrical Representation, Discretization
ME 475: Computer-Aided Design of Structures 1-1 CHAPTER 1 Introduction 1.1 Analysis versus Design 1.2 Basic Steps in Analysis 1.3 What is the Finite Element Method? 1.4 Geometrical Representation, Discretization
An advanced RBF Morph application: coupled CFD-CSM Aeroelastic Analysis of a Full Aircraft Model and Comparison to Experimental Data
 An advanced RBF Morph application: coupled CFD-CSM Aeroelastic Analysis of a Full Aircraft Model and Comparison to Experimental Data Dr. Marco Evangelos Biancolini Tor Vergata University, Rome, Italy Dr.
An advanced RBF Morph application: coupled CFD-CSM Aeroelastic Analysis of a Full Aircraft Model and Comparison to Experimental Data Dr. Marco Evangelos Biancolini Tor Vergata University, Rome, Italy Dr.