Robust Moving Least-squares Fitting with Sharp Features
|
|
|
- Cora Curtis
- 5 years ago
- Views:
Transcription
1 Survey of Methods in Computer Graphics: Robust Moving Least-squares Fitting with Sharp Features S. Fleishman, D. Cohen-Or, C. T. Silva SIGGRAPH 2005.
2 Method Pipeline Input: Point to project on the surface. Cloud of points sampled form the surface. Orientation not required? Output: Point projected on a Piecewise Smoothn MLS surface. Guarantees: Piecewise Smoothness. Manifold?
 Piecewise MLS (Fleishman et.")
3 Smoothness vs Sharpness Global MLS (Levin, Alexa et.al) Piecewise MLS (Fleishman et.al)
4 Point Reallocation 1) Smoothing 2) Polynomial Fitting Avoid Shrinking!
5 Sharp Features Interscetion of smooth surfaces Corner Edge Image from:
6 1) Different surfaces can be distinguished computing normals in noise free data sets. 2) In noisy data sets normal computation near sharp features is not accurate. Image from:
7 Statistical Methods Backward Method Fit a model for the entire set. Incrementally remove outliers and update the model. A single outlier may corrupt the estimator.
8 Statistical Methods Forward Method Fit a model for a selected reliable initial set. Incrementally udpate the inlier set and the model.
9 Least Median of Squares (LMS) Traditional Least Squares Least Median Squares Least Median Squares fit models with up to 50% outliers.
10 Least Median of Squares (LMS) Computing an optimal estimator,, is hard. Instead, an iterative approach is used: 1. Define a number of experiments T. 2. In each experiment select k samples at random to fit a model, and compute the median error using the remaining N k samples. 3. Select the experiment with the lowest median error. Best Result!
11 Least Median of Squares (LMS) The number of samples used o fit the model, k, must be greater than equal than the number of parameters of the model, p. ( For instance p = 2 to fit a line, and p = 3 to fit a plane). If k is SMALL you may not consider enough samples to build a good initial model
12 Least Median of Squares (LMS) The number of samples used o fit the model, k, must be greater than equal than the number of parameters of the model, p. ( For instance p = 2 to fit a line, and p = 3 to fit a plane). If k is BIG you increase the probability to introduce outliers If g is the proportion of inliers the probability of having a good fit after T experiments is 1 (1 g k ) T
13 Forward Search 1) Find an initial model and set of inliers (E p, Q p ) using LMS with k = p. 2) For i > p: Define Q i as the set of i samples with smallest residual in the current model E i 1. Fit a new model E i from the samples in Q i. If the i th order statistic is above a threshold break the loop. 3) Return (E i 1, Q i 1 ).

14 Forward Search
15 Surface Fitting with Forward Search Algorithm 1: Smooth Component Fitting 1) Using LMS, fit a bivariate polinomial of degree 2 E p over a small number of points. This defines the initial set of inliers Q p and the reference plane π. 2) For i > p: Define a set of candidates using Q i 1 and its inmediate neighbours. Set the model E i (i.e., compute a new second degree polynomial) using least squares with the samples on Q i 1 and the initial plane π. If the i th order statistic is above the threshold break the loop. Else, set Q i to be the i candidates with smallest residuals. 3) Return (E i 1, Q i 1 ). Observation: The plane is fixed!
16 Surface Fitting with Forward Search Algorithm 1: Smooth Component Fitting
17 Algorithm 2: Iterative Fitting 1) Apply Smooth Component Fitting in the current sample set. 2) Remove the fitted points from the sample set. 3) Return to step 1.
 Verify on which surfaces the projection is valid 4) Choose the closest valid projection as the point projection.")
18 Algorithm 3: Point Projection 1) Apply Iterative Fitting in a neighborhood of point x. 2) Project x in each of the smooth components using MLS. 3) Verify on which surfaces the projection is valid 4) Choose the closest valid projection as the point projection. Else, select the closest point in the surfaces intersection as the point projection. Case I Case II Projection Map
19 Projection Validation Idea : A surface should be contained in one side of the other. The validation test described in the paper is not clear. It uses: Approximate (exterior?) normals to the surface. The ability of classify points as interior or exterior to the object. Procedure: 1) Find the closest point O to the normals. 2) Classify O interior or exterior to the surface S 2. 3) Check wheter the projection of x in the surface S 1, (i.e x 1 ) is in the same side of S 2 than O. 4) If they are in the same side and O is interior, or they are in opposite sides and O is exterior, then the projection is valid.

20 Projection Validation Idea : A surface should be contained in one side of the other.
21 Projection Validation Idea : A surface should be contained in one side of the other.

22 Noisy Sample Set Results
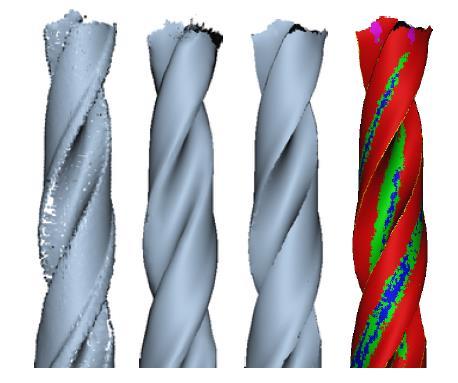
23 Levin(2003) Fleishman(2005)

24 Fleishman(2005) Levin(2003)
Provably Good Moving Least Squares
 Provably Good Moving Least Squares Ravikrishna Kolluri Computer Science Division University of California at Berkeley 1 Problem Definition Given a set of samples on a closed surface build a representation
Provably Good Moving Least Squares Ravikrishna Kolluri Computer Science Division University of California at Berkeley 1 Problem Definition Given a set of samples on a closed surface build a representation
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
Shape Modeling with Point-Sampled Geometry
 Shape Modeling with Point-Sampled Geometry Mark Pauly Richard Keiser Leif Kobbelt Markus Gross ETH Zürich ETH Zürich RWTH Aachen ETH Zürich Motivation Surface representations Explicit surfaces (B-reps)
Shape Modeling with Point-Sampled Geometry Mark Pauly Richard Keiser Leif Kobbelt Markus Gross ETH Zürich ETH Zürich RWTH Aachen ETH Zürich Motivation Surface representations Explicit surfaces (B-reps)
Vision par ordinateur
 Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
If lines m and n are parallel, we write. Transversal: A line that INTERSECTS two or more lines at 2
 Unit 4 Lesson 1: Parallel Lines and Transversals Name: COMPLEMENTARY are angles to add up to 90 SUPPLEMENTARY are angles to add up to 180 These angles are also known as a LINEAR PAIR because they form
Unit 4 Lesson 1: Parallel Lines and Transversals Name: COMPLEMENTARY are angles to add up to 90 SUPPLEMENTARY are angles to add up to 180 These angles are also known as a LINEAR PAIR because they form
Fitting. Fitting. Slides S. Lazebnik Harris Corners Pkwy, Charlotte, NC
 Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
A Hole-Filling Algorithm for Triangular Meshes. Abstract
 A Hole-Filling Algorithm for Triangular Meshes Lavanya Sita Tekumalla, Elaine Cohen UUCS-04-019 School of Computing University of Utah Salt Lake City, UT 84112 USA December 20, 2004 Abstract Data obtained
A Hole-Filling Algorithm for Triangular Meshes Lavanya Sita Tekumalla, Elaine Cohen UUCS-04-019 School of Computing University of Utah Salt Lake City, UT 84112 USA December 20, 2004 Abstract Data obtained
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Model Fitting, RANSAC. Jana Kosecka
 Model Fitting, RANSAC Jana Kosecka Fitting: Overview If we know which points belong to the line, how do we find the optimal line parameters? Least squares What if there are outliers? Robust fitting, RANSAC
Model Fitting, RANSAC Jana Kosecka Fitting: Overview If we know which points belong to the line, how do we find the optimal line parameters? Least squares What if there are outliers? Robust fitting, RANSAC
Non-Iterative, Feature-Preserving Mesh Smoothing
 Non-Iterative, Feature-Preserving Mesh Smoothing Thouis R. Jones (MIT), Frédo Durand (MIT), Mathieu Desbrun (USC) thouis@graphics.csail.mit.edu, fredo@graphics.csail.mit.edu, desbrun@usc.edu 3D scanners
Non-Iterative, Feature-Preserving Mesh Smoothing Thouis R. Jones (MIT), Frédo Durand (MIT), Mathieu Desbrun (USC) thouis@graphics.csail.mit.edu, fredo@graphics.csail.mit.edu, desbrun@usc.edu 3D scanners
Robust Regression. Robust Data Mining Techniques By Boonyakorn Jantaranuson
 Robust Regression Robust Data Mining Techniques By Boonyakorn Jantaranuson Outline Introduction OLS and important terminology Least Median of Squares (LMedS) M-estimator Penalized least squares What is
Robust Regression Robust Data Mining Techniques By Boonyakorn Jantaranuson Outline Introduction OLS and important terminology Least Median of Squares (LMedS) M-estimator Penalized least squares What is
Surface Reconstruction from Unorganized Points
 Survey of Methods in Computer Graphics: Surface Reconstruction from Unorganized Points H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, W. Stuetzle SIGGRAPH 1992. Article and Additional Material at: http://research.microsoft.com/en-us/um/people/hoppe/proj/recon/
Survey of Methods in Computer Graphics: Surface Reconstruction from Unorganized Points H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, W. Stuetzle SIGGRAPH 1992. Article and Additional Material at: http://research.microsoft.com/en-us/um/people/hoppe/proj/recon/
The Curse of Dimensionality
 The Curse of Dimensionality ACAS 2002 p1/66 Curse of Dimensionality The basic idea of the curse of dimensionality is that high dimensional data is difficult to work with for several reasons: Adding more
The Curse of Dimensionality ACAS 2002 p1/66 Curse of Dimensionality The basic idea of the curse of dimensionality is that high dimensional data is difficult to work with for several reasons: Adding more
A Fast and Accurate Denoising Algorithm for Two-Dimensional Curves
 199 A Fast and Accurate Denoising Algorithm for Two-Dimensional Curves Jie Shen and David Yoon University of Michigan-Dearborn, {shen dhyoon}@umich.edu ABSTRACT In this paper we propose a new concept,
199 A Fast and Accurate Denoising Algorithm for Two-Dimensional Curves Jie Shen and David Yoon University of Michigan-Dearborn, {shen dhyoon}@umich.edu ABSTRACT In this paper we propose a new concept,
Automatic Contact Surface Detection
 Automatic Contact Surface Detection Will Pryor Worcester Polytechnic Institute Email: jwpryor@wpi.edu Abstract Motion planners for humanoid robots search the space of all possible contacts the robot can
Automatic Contact Surface Detection Will Pryor Worcester Polytechnic Institute Email: jwpryor@wpi.edu Abstract Motion planners for humanoid robots search the space of all possible contacts the robot can
CS 664 Image Matching and Robust Fitting. Daniel Huttenlocher
 CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
Overview. Efficient Simplification of Point-sampled Surfaces. Introduction. Introduction. Neighborhood. Local Surface Analysis
 Overview Efficient Simplification of Pointsampled Surfaces Introduction Local surface analysis Simplification methods Error measurement Comparison PointBased Computer Graphics Mark Pauly PointBased Computer
Overview Efficient Simplification of Pointsampled Surfaces Introduction Local surface analysis Simplification methods Error measurement Comparison PointBased Computer Graphics Mark Pauly PointBased Computer
Practical Least-Squares for Computer Graphics
 Outline Least Squares with Generalized Errors Robust Least Squares Constrained Least Squares Practical Least-Squares for Computer Graphics Outline Least Squares with Generalized Errors Robust Least Squares
Outline Least Squares with Generalized Errors Robust Least Squares Constrained Least Squares Practical Least-Squares for Computer Graphics Outline Least Squares with Generalized Errors Robust Least Squares
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
RANSAC: RANdom Sampling And Consensus
 CS231-M RANSAC: RANdom Sampling And Consensus Roland Angst rangst@stanford.edu www.stanford.edu/~rangst CS231-M 2014-04-30 1 The Need for RANSAC Why do I need RANSAC? I know robust statistics! Robust Statistics
CS231-M RANSAC: RANdom Sampling And Consensus Roland Angst rangst@stanford.edu www.stanford.edu/~rangst CS231-M 2014-04-30 1 The Need for RANSAC Why do I need RANSAC? I know robust statistics! Robust Statistics
GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES
 GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES Karl W. Ulmer and John P. Basart Center for Nondestructive Evaluation Department of Electrical and Computer Engineering Iowa State University
GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES Karl W. Ulmer and John P. Basart Center for Nondestructive Evaluation Department of Electrical and Computer Engineering Iowa State University
INFO0948 Fitting and Shape Matching
 INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
RANSAC and some HOUGH transform
 RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
Outline. Reconstruction of 3D Meshes from Point Clouds. Motivation. Problem Statement. Applications. Challenges
 Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
Multi-level Partition of Unity Implicits
 Multi-level Partition of Unity Implicits Diego Salume October 23 rd, 2013 Author: Ohtake, et.al. Overview Goal: Use multi-level partition of unity (MPU) implicit surface to construct surface models. 3
Multi-level Partition of Unity Implicits Diego Salume October 23 rd, 2013 Author: Ohtake, et.al. Overview Goal: Use multi-level partition of unity (MPU) implicit surface to construct surface models. 3
Spectral Surface Reconstruction from Noisy Point Clouds
 Spectral Surface Reconstruction from Noisy Point Clouds 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of results?
Spectral Surface Reconstruction from Noisy Point Clouds 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of results?
Algebraic Splats Representation for Point Based Models
 Sixth Indian Conference on Computer Vision, Graphics & Image Processing Algebraic Splats Representation for Point Based Models Naveen Kumar Bolla and P. J. Narayanan Center for Visual Information Technology,
Sixth Indian Conference on Computer Vision, Graphics & Image Processing Algebraic Splats Representation for Point Based Models Naveen Kumar Bolla and P. J. Narayanan Center for Visual Information Technology,
arxiv: v1 [cs.cv] 17 Feb 2016
![arxiv: v1 [cs.cv] 17 Feb 2016](/thumbs/74/70433784.jpg "arxiv: v1 [cs.cv] 17 Feb 2016") Density-based Denoising of Point Cloud Faisal Zaman, Ya Ping Wong, Boon Yian Ng Faculty of Computing and Informatics Multimedia University, Malaysia arxiv:1602.05312v1 [cs.cv] 17 Feb 2016 Abstract. Point
Density-based Denoising of Point Cloud Faisal Zaman, Ya Ping Wong, Boon Yian Ng Faculty of Computing and Informatics Multimedia University, Malaysia arxiv:1602.05312v1 [cs.cv] 17 Feb 2016 Abstract. Point
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
A Unified Projection Operator for Moving Least Squares Surfaces
 EUROGRAPHICS 2007 / D. Cohen-Or and P. Slavík (Guest Editors) Volume 26 (2007), Number 3 A Unified Projection Operator for Moving Least Squares Surfaces Paper 1300 Abstract Moving-Least Squares (MLS) surfaces
EUROGRAPHICS 2007 / D. Cohen-Or and P. Slavík (Guest Editors) Volume 26 (2007), Number 3 A Unified Projection Operator for Moving Least Squares Surfaces Paper 1300 Abstract Moving-Least Squares (MLS) surfaces
A Unified Projection Operator for Moving Least Squares Surfaces SCI Institute Tech Report UUSCI
 A Unified Projection Operator for Moving Least Squares Surfaces SCI Institute Tech Report UUSCI-2007-006 Tilo Ochotta Carlos Scheidegger John Schreiner Yuri Lima Robert M. Kirby Claudio Silva April 25,
A Unified Projection Operator for Moving Least Squares Surfaces SCI Institute Tech Report UUSCI-2007-006 Tilo Ochotta Carlos Scheidegger John Schreiner Yuri Lima Robert M. Kirby Claudio Silva April 25,
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Surface Reconstruction. Gianpaolo Palma
 Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Near Real-time Pointcloud Smoothing for 3D Imaging Systems Colin Lea CS420 - Parallel Programming - Fall 2011
 Near Real-time Pointcloud Smoothing for 3D Imaging Systems Colin Lea CS420 - Parallel Programming - Fall 2011 Abstract -- In this project a GPU-based implementation of Moving Least Squares is presented
Near Real-time Pointcloud Smoothing for 3D Imaging Systems Colin Lea CS420 - Parallel Programming - Fall 2011 Abstract -- In this project a GPU-based implementation of Moving Least Squares is presented
Generating 3D Meshes from Range Data
 Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
Point Cloud Library - Toyota Code Sprint Final Report
 Point Cloud Library - Toyota Code Sprint Final Report Alexandru E. Ichim April 1, 2012 1 Work Done This section will present the work I have done in addition to the results presented in the midterm report.
Point Cloud Library - Toyota Code Sprint Final Report Alexandru E. Ichim April 1, 2012 1 Work Done This section will present the work I have done in addition to the results presented in the midterm report.
Moving Least Squares Multiresolution Surface Approximation
 Moving Least Squares Multiresolution Surface Approximation BORIS MEDEROS LUIZ VELHO LUIZ HENRIQUE DE FIGUEIREDO IMPA Instituto de Matemática Pura e Aplicada Estrada Dona Castorina 110, 22461-320 Rio de
Moving Least Squares Multiresolution Surface Approximation BORIS MEDEROS LUIZ VELHO LUIZ HENRIQUE DE FIGUEIREDO IMPA Instituto de Matemática Pura e Aplicada Estrada Dona Castorina 110, 22461-320 Rio de
Automatic estimation of the inlier threshold in robust multiple structures fitting.
 Automatic estimation of the inlier threshold in robust multiple structures fitting. Roberto Toldo and Andrea Fusiello Dipartimento di Informatica, Università di Verona Strada Le Grazie, 3734 Verona, Italy
Automatic estimation of the inlier threshold in robust multiple structures fitting. Roberto Toldo and Andrea Fusiello Dipartimento di Informatica, Università di Verona Strada Le Grazie, 3734 Verona, Italy
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Feature Preserving Smoothing of 3D Surface Scans. Thouis Raymond Jones
 Feature Preserving Smoothing of 3D Surface Scans by Thouis Raymond Jones Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements for the degree
Feature Preserving Smoothing of 3D Surface Scans by Thouis Raymond Jones Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements for the degree
Lecture 9 Fitting and Matching
 Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Fitting. Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!
! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!") Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
MRO CRISM TRR3 Hyperspectral Data Filtering
 MRO CRISM TRR3 Hyperspectral Data Filtering CRISM Data User's Workshop 03/18/12 F. Seelos, CRISM SOC CRISM PDS-Delivered VNIR TRR3 I/F 3-Panel Plot False Color RGB Composite Composite band distribution
MRO CRISM TRR3 Hyperspectral Data Filtering CRISM Data User's Workshop 03/18/12 F. Seelos, CRISM SOC CRISM PDS-Delivered VNIR TRR3 I/F 3-Panel Plot False Color RGB Composite Composite band distribution
A Volumetric Method for Building Complex Models from Range Images
 A Volumetric Method for Building Complex Models from Range Images 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of
A Volumetric Method for Building Complex Models from Range Images 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of
 Notes on Robust Estimation David J. Fleet Allan Jepson March 30, 005 Robust Estimataion. The field of robust statistics [3, 4] is concerned with estimation problems in which the data contains gross errors,
Notes on Robust Estimation David J. Fleet Allan Jepson March 30, 005 Robust Estimataion. The field of robust statistics [3, 4] is concerned with estimation problems in which the data contains gross errors,
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
f xx (x, y) = 6 + 6x f xy (x, y) = 0 f yy (x, y) = y In general, the quantity that we re interested in is
 = 6 + 6x f xy (x, y) = 0 f yy (x, y) = y In general, the quantity that we re interested in is") 1. Let f(x, y) = 5 + 3x 2 + 3y 2 + 2y 3 + x 3. (a) Final all critical points of f. (b) Use the second derivatives test to classify the critical points you found in (a) as a local maximum, local minimum,
1. Let f(x, y) = 5 + 3x 2 + 3y 2 + 2y 3 + x 3. (a) Final all critical points of f. (b) Use the second derivatives test to classify the critical points you found in (a) as a local maximum, local minimum,
How does bilateral filter relates with other methods?
 A Gentle Introduction to Bilateral Filtering and its Applications How does bilateral filter relates with other methods? Fredo Durand (MIT CSAIL) Slides by Pierre Kornprobst (INRIA) 0:35 Many people worked
A Gentle Introduction to Bilateral Filtering and its Applications How does bilateral filter relates with other methods? Fredo Durand (MIT CSAIL) Slides by Pierre Kornprobst (INRIA) 0:35 Many people worked
Automatic Pipeline Generation by the Sequential Segmentation and Skelton Construction of Point Cloud
 , pp.43-47 http://dx.doi.org/10.14257/astl.2014.67.11 Automatic Pipeline Generation by the Sequential Segmentation and Skelton Construction of Point Cloud Ashok Kumar Patil, Seong Sill Park, Pavitra Holi,
, pp.43-47 http://dx.doi.org/10.14257/astl.2014.67.11 Automatic Pipeline Generation by the Sequential Segmentation and Skelton Construction of Point Cloud Ashok Kumar Patil, Seong Sill Park, Pavitra Holi,
Data-Dependent MLS for Faithful Surface Approximation
 Eurographics Symposium on Geometry Processing (2007) Alexander Belyaev, Michael Garland (Editors) Data-Dependent MLS for Faithful Surface Approximation Yaron Lipman Daniel Cohen-Or David Levin Tel-Aviv
Eurographics Symposium on Geometry Processing (2007) Alexander Belyaev, Michael Garland (Editors) Data-Dependent MLS for Faithful Surface Approximation Yaron Lipman Daniel Cohen-Or David Levin Tel-Aviv
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
Mesh Simplification. Mesh Simplification. Mesh Simplification Goals. Mesh Simplification Motivation. Vertex Clustering. Mesh Simplification Overview
 Mesh Simplification Mesh Simplification Adam Finkelstein Princeton University COS 56, Fall 008 Slides from: Funkhouser Division, Viewpoint, Cohen Mesh Simplification Motivation Interactive visualization
Mesh Simplification Mesh Simplification Adam Finkelstein Princeton University COS 56, Fall 008 Slides from: Funkhouser Division, Viewpoint, Cohen Mesh Simplification Motivation Interactive visualization
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Discrete representations of geometric objects: Features, data structures and adequacy for dynamic simulation. Part I : Solid geometry
 Discrete representations of geometric objects: Features, data structures and adequacy for dynamic simulation. Surfaces Part I : Solid geometry hachar Fleishman Tel Aviv University David Levin Claudio T.
Discrete representations of geometric objects: Features, data structures and adequacy for dynamic simulation. Surfaces Part I : Solid geometry hachar Fleishman Tel Aviv University David Levin Claudio T.
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
High-resolution Shape Reconstruction from Multiple Range Images based on Simultaneous Estimation of Surface and Motion
 High-resolution Shape Reconstruction from Multiple Range Images based on Simultaneous Estimation of Surface and Motion Yoshihiro Watanabe, Takashi Komuro and Masatoshi Ishikawa Graduate School of Information
High-resolution Shape Reconstruction from Multiple Range Images based on Simultaneous Estimation of Surface and Motion Yoshihiro Watanabe, Takashi Komuro and Masatoshi Ishikawa Graduate School of Information
Lecture 8 Fitting and Matching
 Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 3.3 Robust estimation with RANSAC. Thomas Opsahl
 Lecture 3.3 Robust estimation with RANSAC Thomas Opsahl Motivation If two perspective cameras captures an image of a planar scene, their images are related by a homography HH 2 Motivation If two perspective
Lecture 3.3 Robust estimation with RANSAC Thomas Opsahl Motivation If two perspective cameras captures an image of a planar scene, their images are related by a homography HH 2 Motivation If two perspective
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Skeleton Based As-Rigid-As-Possible Volume Modeling
 Skeleton Based As-Rigid-As-Possible Volume Modeling Computer Science Department, Rutgers University As-rigid-as-possible (ARAP) shape modeling is a popular technique to obtain natural deformations. There
Skeleton Based As-Rigid-As-Possible Volume Modeling Computer Science Department, Rutgers University As-rigid-as-possible (ARAP) shape modeling is a popular technique to obtain natural deformations. There
Surfaces, meshes, and topology
 Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Computer Vision. Image Segmentation. 10. Segmentation. Computer Engineering, Sejong University. Dongil Han
 Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Surface Simplification Using Quadric Error Metrics
 Surface Simplification Using Quadric Error Metrics Authors: Michael Garland & Paul Heckbert Presented by: Niu Xiaozhen Disclaimer: Some slides are modified from original slides, which were designed by
Surface Simplification Using Quadric Error Metrics Authors: Michael Garland & Paul Heckbert Presented by: Niu Xiaozhen Disclaimer: Some slides are modified from original slides, which were designed by
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Chapters 1 7: Overview
 Chapters 1 7: Overview Photogrammetric mapping: introduction, applications, and tools GNSS/INS-assisted photogrammetric and LiDAR mapping LiDAR mapping: principles, applications, mathematical model, and
Chapters 1 7: Overview Photogrammetric mapping: introduction, applications, and tools GNSS/INS-assisted photogrammetric and LiDAR mapping LiDAR mapping: principles, applications, mathematical model, and
Medial Scaffolds for 3D data modelling: status and challenges. Frederic Fol Leymarie
 Medial Scaffolds for 3D data modelling: status and challenges Frederic Fol Leymarie Outline Background Method and some algorithmic details Applications Shape representation: From the Medial Axis to the
Medial Scaffolds for 3D data modelling: status and challenges Frederic Fol Leymarie Outline Background Method and some algorithmic details Applications Shape representation: From the Medial Axis to the
ARTICLE IN PRESS Computer-Aided Design ( )
") Computer-Aided Design ( ) Contents lists available at ScienceDirect Computer-Aided Design journal homepage: www.elsevier.com/locate/cad Robust principal axes determination for point-based shapes using
Computer-Aided Design ( ) Contents lists available at ScienceDirect Computer-Aided Design journal homepage: www.elsevier.com/locate/cad Robust principal axes determination for point-based shapes using
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
Geometric Modeling in Graphics
 Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
A closed plane figure with at least 3 sides The sides intersect only at their endpoints. Polygon ABCDEF
 A closed plane figure with at least 3 sides The sides intersect only at their endpoints B C A D F E Polygon ABCDEF The diagonals of a polygon are the segments that connects one vertex of a polygon to another
A closed plane figure with at least 3 sides The sides intersect only at their endpoints B C A D F E Polygon ABCDEF The diagonals of a polygon are the segments that connects one vertex of a polygon to another
Robust line segmentation for handwritten documents
 Robust line segmentation for handwritten documents Kamal Kuzhinjedathu, Harish Srinivasan and Sargur Srihari Center of Excellence for Document Analysis and Recognition (CEDAR) University at Buffalo, State
Robust line segmentation for handwritten documents Kamal Kuzhinjedathu, Harish Srinivasan and Sargur Srihari Center of Excellence for Document Analysis and Recognition (CEDAR) University at Buffalo, State
Surface Reconstruction with MLS
 Surface Reconstruction with MLS Tobias Martin CS7960, Spring 2006, Feb 23 Literature An Adaptive MLS Surface for Reconstruction with Guarantees, T. K. Dey and J. Sun A Sampling Theorem for MLS Surfaces,
Surface Reconstruction with MLS Tobias Martin CS7960, Spring 2006, Feb 23 Literature An Adaptive MLS Surface for Reconstruction with Guarantees, T. K. Dey and J. Sun A Sampling Theorem for MLS Surfaces,
REPRESENTATION OF BIG DATA BY DIMENSION REDUCTION
 Fundamental Journal of Mathematics and Mathematical Sciences Vol. 4, Issue 1, 2015, Pages 23-34 This paper is available online at http://www.frdint.com/ Published online November 29, 2015 REPRESENTATION
Fundamental Journal of Mathematics and Mathematical Sciences Vol. 4, Issue 1, 2015, Pages 23-34 This paper is available online at http://www.frdint.com/ Published online November 29, 2015 REPRESENTATION
Overview. Spectral Processing of Point- Sampled Geometry. Introduction. Introduction. Fourier Transform. Fourier Transform
 Overview Spectral Processing of Point- Sampled Geometry Introduction Fourier transform Spectral processing pipeline Spectral filtering Adaptive subsampling Summary Point-Based Computer Graphics Markus
Overview Spectral Processing of Point- Sampled Geometry Introduction Fourier transform Spectral processing pipeline Spectral filtering Adaptive subsampling Summary Point-Based Computer Graphics Markus
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Curvature-Based Regularization for Surface Approximation
 Curvature-Based Regularization for Surface Approximation Carl Olsson Centre for Mathematical Sciences Lund University, Sweden calle@maths.lth.se Yuri Boykov Department of Computer Science University of
Curvature-Based Regularization for Surface Approximation Carl Olsson Centre for Mathematical Sciences Lund University, Sweden calle@maths.lth.se Yuri Boykov Department of Computer Science University of
ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW
 ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW Thorsten Thormählen, Hellward Broszio, Ingolf Wassermann thormae@tnt.uni-hannover.de University of Hannover, Information Technology Laboratory,
ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW Thorsten Thormählen, Hellward Broszio, Ingolf Wassermann thormae@tnt.uni-hannover.de University of Hannover, Information Technology Laboratory,
6. Linear Discriminant Functions
 6. Linear Discriminant Functions Linear Discriminant Functions Assumption: we know the proper forms for the discriminant functions, and use the samples to estimate the values of parameters of the classifier
6. Linear Discriminant Functions Linear Discriminant Functions Assumption: we know the proper forms for the discriminant functions, and use the samples to estimate the values of parameters of the classifier
Fitting (LMedS, RANSAC)
") Fitting (LMedS, RANSAC) Thursday, 23/03/2017 Antonis Argyros e-mail: argyros@csd.uoc.gr LMedS and RANSAC What if we have very many outliers? 2 1 Least Median of Squares ri : Residuals Least Squares n 2
Fitting (LMedS, RANSAC) Thursday, 23/03/2017 Antonis Argyros e-mail: argyros@csd.uoc.gr LMedS and RANSAC What if we have very many outliers? 2 1 Least Median of Squares ri : Residuals Least Squares n 2
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling
 Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
BA#2 Review Questions Answers will be online. 1. Using the picture below, determine which of the following conjectures is valid?
 # Review Questions nswers will be online 1. Using the picture below, determine which of the following conjectures is valid? (.) 70 N 30 T T is the longest side in NT N is the longest side in NT NT is the
# Review Questions nswers will be online 1. Using the picture below, determine which of the following conjectures is valid? (.) 70 N 30 T T is the longest side in NT N is the longest side in NT NT is the
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition. Robust Methods. CS4243 Robust Methods 1
 Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Robust Methods CS4243 Robust Methods 1 Consider this data set Fitting a line to blue points give blue line. Outliers cause fitting error (red
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Robust Methods CS4243 Robust Methods 1 Consider this data set Fitting a line to blue points give blue line. Outliers cause fitting error (red
Automatic least-squares projection of points onto point clouds with applications in reverse engineering
 Computer-Aided Design 38 (2006) 1251 1263 www.elsevier.com/locate/cad Automatic least-squares projection of points onto point clouds with applications in reverse engineering Yu-Shen Liu a,b,, Jean-Claude
Computer-Aided Design 38 (2006) 1251 1263 www.elsevier.com/locate/cad Automatic least-squares projection of points onto point clouds with applications in reverse engineering Yu-Shen Liu a,b,, Jean-Claude
Voronoi Diagram. Xiao-Ming Fu
 Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Volume Illumination and Segmentation
 Volume Illumination and Segmentation Computer Animation and Visualisation Lecture 13 Institute for Perception, Action & Behaviour School of Informatics Overview Volume illumination Segmentation Volume
Volume Illumination and Segmentation Computer Animation and Visualisation Lecture 13 Institute for Perception, Action & Behaviour School of Informatics Overview Volume illumination Segmentation Volume
Finding Measures of Angles Formed by Transversals Intersecting Parallel Lines
 Lesson 22 Finding Measures of Angles Formed by Transversals Intersecting Parallel Lines 8.G.5 1 Getting the idea The figure below shows two parallel lines, j and k. The parallel lines,, are intersected
Lesson 22 Finding Measures of Angles Formed by Transversals Intersecting Parallel Lines 8.G.5 1 Getting the idea The figure below shows two parallel lines, j and k. The parallel lines,, are intersected
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
UNIVERSITY OF TORONTO Faculty of Applied Science and Engineering. ROB501H1 F: Computer Vision for Robotics. Midterm Examination.
 UNIVERSITY OF TORONTO Faculty of Applied Science and Engineering ROB501H1 F: Computer Vision for Robotics October 26, 2016 Student Name: Student Number: Instructions: 1. Attempt all questions. 2. The value
UNIVERSITY OF TORONTO Faculty of Applied Science and Engineering ROB501H1 F: Computer Vision for Robotics October 26, 2016 Student Name: Student Number: Instructions: 1. Attempt all questions. 2. The value
CS 4620 Final Exam. (a) Is a circle C 0 continuous?
 Is a circle C 0 continuous?") CS 4620 Final Exam Wednesday 9, December 2009 2 1 2 hours Prof. Doug James Explain your reasoning for full credit. You are permitted a double-sided sheet of notes. Calculators are allowed but unnecessary.
CS 4620 Final Exam Wednesday 9, December 2009 2 1 2 hours Prof. Doug James Explain your reasoning for full credit. You are permitted a double-sided sheet of notes. Calculators are allowed but unnecessary.
Model Fitting. Introduction to Computer Vision CSE 152 Lecture 11
 Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Geometry Representations with Unsupervised Feature Learning
 Geometry Representations with Unsupervised Feature Learning Yeo-Jin Yoon 1, Alexander Lelidis 2, A. Cengiz Öztireli 3, Jung-Min Hwang 1, Markus Gross 3 and Soo-Mi Choi 1 1 Department of Computer Science
Geometry Representations with Unsupervised Feature Learning Yeo-Jin Yoon 1, Alexander Lelidis 2, A. Cengiz Öztireli 3, Jung-Min Hwang 1, Markus Gross 3 and Soo-Mi Choi 1 1 Department of Computer Science
Digital Geometry Processing
 Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in