Moving Least Squares Multiresolution Surface Approximation
|
|
|
- Chrystal Imogene Arnold
- 5 years ago
- Views:
Transcription
1 Moving Least Squares Multiresolution Surface Approximation BORIS MEDEROS LUIZ VELHO LUIZ HENRIQUE DE FIGUEIREDO IMPA Instituto de Matemática Pura e Aplicada Estrada Dona Castorina 110, Rio de Janeiro, RJ, Brazil boris@impa.br lvelho@impa.br lhf@impa.br Abstract. We describe a new method for surface reconstruction based on unorganized point clouds without normals. We also present a new algorithm for refining the inital triangulation. The output of the method is a refined triangular mesh with points on the moving least squares surface of the original point cloud. Keywords: multi-resolution; surface reconstruction; k-nearest neighbors; moving least squares. point cloud reduction triangulation refinement 1 Introduction We consider the problem of surface reconstruction and refinement from scattered data points without normals. Several algorithms are known for this important problem [4 13], including a number of recent algorithms with theoretical guarantees [4 7]. Those algorithms use a 3D Delaunay triangulation of the original point cloud to compute a triangular surface mesh. Computing the Delaunay triangulation can be slow and susceptible to numerical errors. Gopi, Krishnan, and Silva [12] proposed an algorithm based on Differential Geometry that projects the neighborhood of each sample point on a tangent plane, computes the 2D Delaunay triangulation of this projected neighborhood, and lifts it to 3D. Hoppe et al. [10] estimate a tangent plane at each sample point using its k-nearest neighbors and use the distance to the plane of the nearest sample as an estimative of the signed distance function to the surface. The zero set of this distance function is extracted using the marching cubes algorithm. Other algorithms [8,9,13] use a greedy approach. The ball pivoting algorithm [9] rolls a ball over the sample points; it requires the normal to the surface at each sample point, but it can create artifacts. Boissonnat [8] starts by finding an initial edge pq in the triangulated reconstruction; he then computes a tangent plane around the edge, projects the k-nearest neighbors of both vertices onto this plane, and determines the point r that maximizes the angle p r q (where the bar represents projected points on the tangent plane). This point r determines a surface triangle prq. The process is repeated for each border edge, resulting in a triangulated surface. Boyer [13] proposes an incremental algorithm over the 3D Delaunay triangulation of the samples, and relies on regular interpolants. Our algorithm uses a different approach: it computes a set of representative points near of the original point cloud and triangulates these representative points using a new incremental algorithm based on k-nearest neighbors. This is somewhat similar to what is done in other greedy algorithms [8, 9, 13]: For each border edge, the algorithm uses angle criteria to select a point to make a triangle with the edge. The initial triangulation is refined using a new method based on moving least square operators [1 3]. Our algorithm does not need Delaunay triangulations and it can handle surfaces with borders. Section 2 describes in detail the four steps of our method: clustering, reduction, triangulation, and refinement. These steps are illustrated above. Section 3 discusses several examples of the method in action. Submitted to SIBGRAPI 2003 on April 30, page 1 of 8

2 Figure 1: Point clouds Figure 2: Clusters 2 Our Method Starting from a point cloud Q R 3 that samples an unknown C 1 surface S, our method produces a mesh with points near the moving least-squares surface of Q [1 3]. The method has four steps: 1. Clustering: Split the point cloud into a set of clusters. 2. Reduction: Compute a representative point of each cluster on the moving least squares surface of its k-nearest neighbors. 3. Triangulation: Build a triangulated surface over the set of representative points. 4. Refinement: Refine the initial mesh into a finer mesh that is adapted to the geometry of the unknown surface S. We shall now describe each of these steps in detail. 2.1 Clustering The goal of this first step is to partition the original set of points Q into a finite set of clusters, such that the curvature of the original surface S varies a little within each cluster. Since S is not known, its curvature must be estimated from the sample points Q. We use a hierarchical clustering method based on a BSP tree [3]. Each node in this tree contains a subset P = {p 1,..., p n } of the original point cloud Q. We use the covariance matrix C of P to decide whether or not to subdivide the node: C = p 1 p p 2 p. p n p T p 1 p p 2 p. p n p, p = 1 n n p i. i=1 Since C is a symmetric positive semi-definite 3 3 matrix, its three eigenvalues are real and we can order them: λ 1 λ 2 λ 3. These eigenvalues measure the variation of the points in P along the directions of their corresponding eigenvectors v 1, v 2, v 3. The eigenvectors v 2 and v 3 define the directions of highest variation and define a regression plane Π for P. The eigenvector v 1 is normal to Π and its eigenvalue λ 1 measures the variation of the points in P with respect to the plane Π. So, small values of λ 1 mean that all points in P are approximately on Π. Hence, the ratio λ 1 σ = λ 1 + λ 2 + λ 3 is a good measure of the flatness of the point set P and can be used as an estimate for the curvature of S around P. We use this flatness measure to define subdivision criteria for the BSP tree. A node is divided in two when both conditions below are satisfied: 1. The ratio σ is larger than a user-defined tolerance σ max ; 2. The number n of points in P is larger than a userdefined value n min. The nodes are divided by classifying the points of P with respect to the regression plane Π. The points of P that are in the same side of Π will form a new node. The leaves of the BSP tree will be the clusters. Figure 2 shows the clusters computed for the point clouds shown in Figure Reduction We find a representative point for each cluster using a new method based on the moving least squares theory [1 3]. The moving least square surface of a set of points R near the surface S is the set of fixed points of a projection operator Ψ(R, ) defined in [1 3]: MLS(R) = {y R 3 : Ψ(R, y) = y}. Given a point point r R 3, we approximate Ψ(Q, r) by Ψ(K, r), where K is the set of k-nearest neighbors of r in Q (see [3] for details). To determine a representative point for each cluster, we start with the centroid c of the set of points in the cluster. This point c is not necessarily near S and so we move page 2 of 8
3 of half-edges that represents the current boundary. Here is a summary of the main steps: Figure 3: Representatives it toward S and obtain the point r = c + t min n c, where n c and t min are explained below. The point r is then projected onto the moving least squares surface MLS(Q) of the initial point cloud and we obtain the point r proj = Ψ(Q, r), which is selected to represent the cluster. Figure 3 shows the representatives for the clusters shown in Figure 2. The vector n c used to define r is the eigenvector associated to the smallest eigenvalue of a weighted covariance matrix M over the set K of k-nearest neighbors of c in Q. More precisely, M is the 3 3 matrix whose entries are m ij = p K p c 2 (p i c i )(p j c j ) exp( h 2 ), where p = (p 1, p 2, p 3 ), c = (c 1, c 2, c 3 ), and h is a parameter reflecting the spacing between neighboring points in Q (see [1, 2] for details). We use h equal to three times the distance of c to its near neighbor in Q. Using the direction n c as above, we compute t min = arg min t p c tn c 2. p K We interpret this as finding the point r = c + t min n c on the line through c in the direction of n c that is closest to the original surface. 2.3 Triangulation The next step is to build a triangulated surface over the set of representative points. We do this using an incremental algorithm that introduces new features in the basic framework of previous incremental algorithms [8, 9, 13]. The main idea behind the algorithm is to determine incrementally the restricted Delaunay triangles, because these triangles form a piecewise linear manifold homeomorphic to the original surface [4]. The algorithm computes a sequence of triangulated surfaces with border. At each step, it chooses a border edge, finds a new triangle associated to this edge, and updates the current surface. The algorithm maintains a half-edge data structure H that represents the current surface and a list L Build a 3d-tree on the set of representatives. Get an initial triangle and initialize H and L with it. repeat Remove a half edge uv from L. usv the triangle adjacent to uv in H. P set of k-nearest neighbors of u. q GET POINT(usv, u, P ) Insert uqv into H and its border edges into L. until L is empty. The initial surface contains a single triangle. This triangle is inserted into H and all its edges are inserted into L. To find the initial triangle, we select a point p Q and determine its nearest neighbor q Q. These two points define the first border edge: pq. Among the k-nearest neighbors of p, we determine the point r that maximizes the angle p r q. The initial triangle prq is in the Delaunay triangulation of the k-nearest neighbors of p (see [14], Lemma 3). Once the initial surface has been found, we continue by removing edges from L until it is empty. For each edge uv, we select a point q among the k-nearest neighbors of u to create a new triangle uqv, which is added to H and L. (We use a 3d-tree built at the start of the algorithm to identify k-nearest neighbors.) The number of edges of uqv inserted in L varies: it is zero when the triangle uqv fills a hole in H; it is one when uq or vq are consecutive edges of uv in the border of the current surface; otherwise, it is two. When q is already in H, we have to join two connected components of the border or to split one component in two new connected components. We determine the point q using the following algorithm: GET POINT (usv, u, P ): d u distance from u to its nearest neighbor. d v distance from v to its nearest neighbor. d min min{d u, d v }. repeat C θ set of points t such that: (i) the dihedral angle between the triangles usv and utv is in [π θ, π + θ] (ii) Triangle utv does not violate the topology of H. (iii) max{d(u, t), d(v, t)} d min < ε 1. if C θ then Determine the set C θ of points q C θ with maximum angle u q v. else θ θ + ε 2. until C θ or θ > π 2 + ε 2 Here, θ, ε 1, and ε 2 are user-defined tolerances. page 3 of 8
![Condition (i) in this algorithm is based on the theorem below, which we prove in [14]: Theorem 1 Let F be a β, r-sampling of a surface S with r < 1/4.](/docs-images/89/99847720/images/4-1.jpg "Then the angle between two adjacent restricted 2r Delaunay triangles sharing an edge is at least π 2( 1 4r + 3r )).")
 and (iii).")
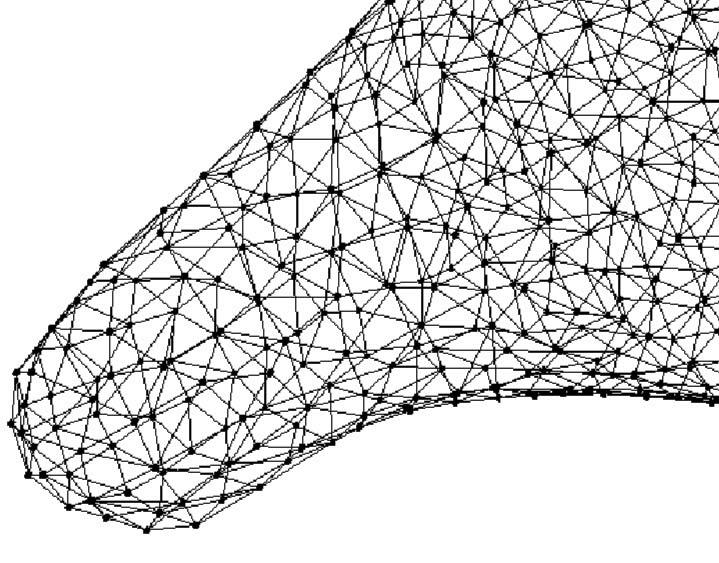
4 Condition (i) in this algorithm is based on the theorem below, which we prove in [14]: Theorem 1 Let F be a β, r-sampling of a surface S with r < 1/4. Then the angle between two adjacent restricted 2r Delaunay triangles sharing an edge is at least π 2( 1 4r + 3r )). arcsin( 1 r This theorem show that the dihedral angle between two adjacent restricted Delaunay triangles converges to π as the sampling density increases (that is, as r 0). We start with an initial region [π θ, π + θ] with small θ to determine the set of point Cθ in this region that satisfy criteria (ii) and (iii). If Cθ is not empty, we find the point q Cθ with maximum angle u q v; otherwise, we increase θ by ε2 and repeat the process until we find a point q or θ gets too large. Condition (ii) is used to eliminate the points t that are interior to H and the points on the boundary of H that would violate the topology if they were selected. When the point t is on the boundary of H, we first fit a plane Π to the set of points adjacent to t in H (the star of t) and project this start onto Π, resulting in a set of 2d triangles T. If these triangles do not form a triangulation, that is, is two edges intersect, then we have a topology violation. Condition (iii) is used to determine border edges, and is based on the following theorem, which we prove in [14]: Theorem 2 Let F be a β, r-sampling of a surface S with r < 1/3. Let T1 = uvt and T2 = uvq be restricted Delaunay triangles sharing the edge uv. Then, the length 2β d, where d = of the longest edge of T2 is at most 1 3r min{du, dv } and du (respectively, dv ) is the distance of u (respectively, v) to its nearest neighbor. This theorem shows that there is little variation between the length of the edges of two triangles adjacent to a interior edge. We observed that the length of edges of the adjacent triangles to a boundary edge are very different. In practice, we have no way to estimate β and r, and 2β and so we use a predefined value ε1 as the constant 1 3r a point t is eliminated if max{d(u,t),d(v,t)} > ε1. If Cθ is dmin empty, the edge uv is a candidate border edge. If Cθ is empty for all θ tested, uv is a border edge. If Cθ is not empty, we compute the subset Cθ0 of points q with maximum angle u q v. We justify this criterion as follows: In R2, given a Delaunay triangle uvs, its adjacent Delaunay triangle uvq is the one with maximum angle u q v. Although this is a criterion for R2, we use it for surfaces because the surface normal varies little in the surface neighborhood of a point u containing the vertex of the restricted Delaunay triangulation (see [4 6]); in other words, we can consider this neighborhood as flat. Figure 4: Triangulations Figure 4 shows the triangulated surfaces over the set of representatives shown in Figure Refinement The goal of this step is to refine the initial coarse triangulation into a finer triangulation adapted to the geometry of the unknown surface S from which the point cloud Q was sampled. We propose the following method to refine an edge uv: We compute the middle point of the edge. If this point is too far from the original point cloud Q, it is projected onto the moving least squared surface and a new edge is added to each adjacent triangle of the edge uv, dividing each triangle into two new triangles. We repeat this process for each edge in the original triangulation. The details are discussed below. More precisely, for each edge uv we compute its midpoint m = u+v 2 and its normal nm = nu +nv 2, v k nu +n k 2 where nu and nv are the normals of u and v respectively, computed using the local triangulation (star) of each vertex. Using the set K of k-nearest neighbors of m in the original points cloud, we minimize the following functional with respect to t : α = min t X p K kp m t nm k2 = 1 X (p m) nm k p K page 4 of 8
5 Model Clustering Triangulation Ref 1 Ref 2 Bunny 3.68 s s 2.33 s 7.9 s p 4457 p 8895 t t t Club 1.36 s 5.3 s 1.11 s 3.86 s p 2103 p 4121 t t t Cactus 0.21 s 1.58 s 0.2 s 0.68 s 3337 p 404 p 782 t 2776 t 9614 t Cat 0.77 s 6.02 s 0.61 s 2.06 s p 1244 p 2453 t t 8535 t Dragon s s s s p p t t t Horse 4.67 s s 3.17 s s p 6164 p t t t Table 1: Results on a 1.8Ghz Pentium 4 with 512Mb of RAM running Linux (s=seconds, p=points, t=triangles) Figure 5: Refinement also in the previous figures). Table 1 shows the times (in seconds) taken in each step of the algorithm and the sizes (points and triangles) of the result models. The pictures in this paper are available in full size and color at As in the reduction step, this is interpreted as finding the point on the line through m in the direction of n m that is closest to the original surface S. We use α as a measure of the need of refinement. If α is smaller than some predefined value ε, we do not refine the edge; otherwise, we project the point m + α n m onto the moving least squares surface, producing the new point m = Ψ(Q, m + α n m ) and replace the triangles auv and buv adjacent to uv with the new triangles u ma, v ma and u mb, v mb, respectively. If the ratio between the length of the minimum edge and the maximum edge of the triangles auv or buv is too small, we do not divide the triangles. This procedure is applied to all the old edges while the scalar t is larger than ε. In the resulting mesh, we flip the diagonals of each quadrilateral formed by the pairs of adjacent triangles if the length of one diagonal (the common edge) is larger than the length of the other diagonal (the segment joining the opposite vertex). The final result is a triangulated surface whose vertices are on the moving least squares approximation surface of the original points cloud. Figure 5 shows two refinement of the initial triangulations shown in Figure 4. 3 Results Our algorithm has been implemented using CGAL [15] for computing the half edge data structure and the operations in the refinement. The algorithm has been tested on several data sets available on the internet [16, 17] using two refinement steps. The results are shown in Figures 6 9 (and 4 Conclusion We presented a new algorithm for reconstruction and refinement of surface, giving as output a refined triangular mesh with points in the moving least squares surface of the original points cloud. The new method proposed to computing representatives points produces a simplified sample on the moving least squares surface. The new triangulation algorithm does not need to computed 3D Delaunay triangulations, which in the worst case requires quadratic time and is prone to numerical errors. The new refinement method is fast and gives a fine triangular mesh adapted to the geometry of the unknown surface. Acknowledgments. The authors are partially supported by CNPq research grants. The authors are members of Visgraf, the computer graphics laboratory at IMPA, which is sponsored by CNPq, FAPERJ, FINEP, and IBM Brasil. References [1] M. Alexa, J. Behr, D. Cohen-Or, S. Fleishman, D. Levin, C. Silva. Point set surfaces. IEEE Visualization 2001, pp [2] M. Alexa, J. Behr, D. Cohen-Or, S. Fleishman, D. Levin, C. Silva. Computing and rendering point set surfaces. IEEE Transactions on Visualization and Computer Graphics 9(1):3 15, [3] M. Pauly, M. Gross, L. Kobbelt. Efficient simplification of point-sampled surfaces. IEEE Vizualization 2002, pp page 5 of 8
![[4] N. Amenta, M. Bern, M. Kanvisellis. A new Voronoi based surface algorithm. SIGGRAPH 98, pp. 415 421. [5] N. Amenta, S. Choi. One-pass Delaunay filtering for homeomorphic 3D surface reconstruction.](/docs-images/89/99847720/images/6-0.jpg "Technical Report TR99-08, University of Texas at Austin, 1999. [6] N. Amenta, S. Choi, R. Kolluri. The power crust. 6th ACM Symposium on Solid Modeling, pp. 249 260, 2001. [7] J. D. Boissonnat, F.")
6 [4] N. Amenta, M. Bern, M. Kanvisellis. A new Voronoi based surface algorithm. SIGGRAPH 98, pp [5] N. Amenta, S. Choi. One-pass Delaunay filtering for homeomorphic 3D surface reconstruction. Technical Report TR99-08, University of Texas at Austin, [6] N. Amenta, S. Choi, R. Kolluri. The power crust. 6th ACM Symposium on Solid Modeling, pp , [7] J. D. Boissonnat, F. Cazals. Smooth surface reconstruction via natural neighbor interpolation of distance function. Computational Geometry 22(1 3): , [8] J. D. Boissonnat. Geometric structures for three-dimensional shape reconstruction. ACM Transactions on Graphics 3(4): , [9] F. Bernardini, J. Mittelman, H. Rushmeier, C. Silva, G. Taubin. The ball-pivoting algorithm for surface reconstruction. IEEE Transactions on Visualization and Computer Graphics 5(4): , [10] H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, W. Stuetzle. Surface reconstruction from unorganized points. SIG- GRAPH 92. pp [11] D. Freedman. Efficient simplicial reconstruction of manifolds from their samples. IEEE Transaction on Pattern Analysis and Machine Intelligence 24(10): , [12] M. Gopi, S. Krishnan, C. Silva. Surface reconstruction based on lower dimensional localized Delaunay triangulation. Computer Graphics Forum 19(3):C467 C478, [13] E. Boyer, S. Petitjean. Curve and surface reconstruction from regular and non regular point sets. Computational Geometry 19(2 3): , [14] B. Mederos, L. Velho, L. H. Figueiredo. A Simple Algorithm for Multiresolution Surface Reconstruction. Technical Report TR03-03, Instituto de Matemática Pura e Aplicada, RefBib/Data/PS_PDF/tr0303/ [15] [16] [17] Figure 6: Dragon page 6 of 8


7 Figure 7: Cactus Figure 8: Cat page 7 of 8





8 Figure 9: Horse page 8 of 8
Smooth Surface Reconstruction from Noisy Clouds
 Smooth Surface Reconstruction from Noisy Clouds Boris Mederos, Luiz Velho and Luiz Henrique de Figueiredo IMPA Instituto de Matemática Pura e Aplicada, Estrada Dona Castorina 110, 22461-320 Rio de Janeiro,
Smooth Surface Reconstruction from Noisy Clouds Boris Mederos, Luiz Velho and Luiz Henrique de Figueiredo IMPA Instituto de Matemática Pura e Aplicada, Estrada Dona Castorina 110, 22461-320 Rio de Janeiro,
Provably Good Moving Least Squares
 Provably Good Moving Least Squares Ravikrishna Kolluri Computer Science Division University of California at Berkeley 1 Problem Definition Given a set of samples on a closed surface build a representation
Provably Good Moving Least Squares Ravikrishna Kolluri Computer Science Division University of California at Berkeley 1 Problem Definition Given a set of samples on a closed surface build a representation
Outline. Reconstruction of 3D Meshes from Point Clouds. Motivation. Problem Statement. Applications. Challenges
 Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
Surface Reconstruction. Gianpaolo Palma
 Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Surface Reconstruction from Unorganized Points
 Survey of Methods in Computer Graphics: Surface Reconstruction from Unorganized Points H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, W. Stuetzle SIGGRAPH 1992. Article and Additional Material at: http://research.microsoft.com/en-us/um/people/hoppe/proj/recon/
Survey of Methods in Computer Graphics: Surface Reconstruction from Unorganized Points H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, W. Stuetzle SIGGRAPH 1992. Article and Additional Material at: http://research.microsoft.com/en-us/um/people/hoppe/proj/recon/
Correctness. The Powercrust Algorithm for Surface Reconstruction. Correctness. Correctness. Delaunay Triangulation. Tools - Voronoi Diagram
 Correctness The Powercrust Algorithm for Surface Reconstruction Nina Amenta Sunghee Choi Ravi Kolluri University of Texas at Austin Boundary of a solid Close to original surface Homeomorphic to original
Correctness The Powercrust Algorithm for Surface Reconstruction Nina Amenta Sunghee Choi Ravi Kolluri University of Texas at Austin Boundary of a solid Close to original surface Homeomorphic to original
Point-based Simplification Algorithm
 Point-based Simplification Algorithm Pai-Feng Lee 1, Bin-Shyan Jong 2 Department of Information Management, Hsing Wu College 1 Dept. of Information and Computer Engineering Engineering, Chung Yuan Christian
Point-based Simplification Algorithm Pai-Feng Lee 1, Bin-Shyan Jong 2 Department of Information Management, Hsing Wu College 1 Dept. of Information and Computer Engineering Engineering, Chung Yuan Christian
Using Semi-Regular 4 8 Meshes for Subdivision Surfaces
 Using Semi-Regular 8 Meshes for Subdivision Surfaces Luiz Velho IMPA Instituto de Matemática Pura e Aplicada Abstract. Semi-regular 8 meshes are refinable triangulated quadrangulations. They provide a
Using Semi-Regular 8 Meshes for Subdivision Surfaces Luiz Velho IMPA Instituto de Matemática Pura e Aplicada Abstract. Semi-regular 8 meshes are refinable triangulated quadrangulations. They provide a
Generalizing the C 4 Four-directional Box Spline to Surfaces of Arbitrary Topology Luiz Velho Abstract. In this paper we introduce a new scheme that g
 Generalizing the C 4 Four-directional Box Spline to Surfaces of Arbitrary Topology Luiz Velho Abstract. In this paper we introduce a new scheme that generalizes the four-directional box spline of class
Generalizing the C 4 Four-directional Box Spline to Surfaces of Arbitrary Topology Luiz Velho Abstract. In this paper we introduce a new scheme that generalizes the four-directional box spline of class
A Constrained Delaunay Triangle Mesh Method for Three-Dimensional Unstructured Boundary Point Cloud
 International Journal of Computer Systems (ISSN: 2394-1065), Volume 03 Issue 02, February, 2016 Available at http://www.ijcsonline.com/ A Constrained Delaunay Triangle Mesh Method for Three-Dimensional
International Journal of Computer Systems (ISSN: 2394-1065), Volume 03 Issue 02, February, 2016 Available at http://www.ijcsonline.com/ A Constrained Delaunay Triangle Mesh Method for Three-Dimensional
Overview. Efficient Simplification of Point-sampled Surfaces. Introduction. Introduction. Neighborhood. Local Surface Analysis
 Overview Efficient Simplification of Pointsampled Surfaces Introduction Local surface analysis Simplification methods Error measurement Comparison PointBased Computer Graphics Mark Pauly PointBased Computer
Overview Efficient Simplification of Pointsampled Surfaces Introduction Local surface analysis Simplification methods Error measurement Comparison PointBased Computer Graphics Mark Pauly PointBased Computer
Applications. Oversampled 3D scan data. ~150k triangles ~80k triangles
 Mesh Simplification Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies for efficient
Mesh Simplification Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies for efficient
Geometric Modeling in Graphics
 Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
ON THE WAY TO WATER-TIGHT MESH
 ON THE WAY TO WATER-TIGHT MESH Rui Liu, Darius Burschka, Gerd Hirzinger Institute of Robotics and Mechatronics, German Aerospace Center (DLR) Oberpfaffenhofen, 82234 Wessling, Germany. Rui.Liu@dlr.de KEY
ON THE WAY TO WATER-TIGHT MESH Rui Liu, Darius Burschka, Gerd Hirzinger Institute of Robotics and Mechatronics, German Aerospace Center (DLR) Oberpfaffenhofen, 82234 Wessling, Germany. Rui.Liu@dlr.de KEY
Geodesic Paths on Triangular Meshes
 Geodesic Paths on Triangular Meshes Dimas Martínez Luiz Velho Paulo Cezar Carvalho IMPA Instituto Nacional de Matemática Pura e Aplicada Estrada Dona Castorina, 110, 22460-320 Rio de Janeiro, RJ, Brasil
Geodesic Paths on Triangular Meshes Dimas Martínez Luiz Velho Paulo Cezar Carvalho IMPA Instituto Nacional de Matemática Pura e Aplicada Estrada Dona Castorina, 110, 22460-320 Rio de Janeiro, RJ, Brasil
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
IJREAT International Journal of Research in Engineering & Advanced Technology, Volume 1, Issue 2, April-May, 2013 ISSN:
 Optimization of Mesh Reconstruction using Delaunay and Ball Pivoting Algorithm Bharti Sood 1, Kamaldeep Kaur 2 1, 2 Department of Electronics & Communication Engineering, BBSBEC, Fatehgarh Sahib, India
Optimization of Mesh Reconstruction using Delaunay and Ball Pivoting Algorithm Bharti Sood 1, Kamaldeep Kaur 2 1, 2 Department of Electronics & Communication Engineering, BBSBEC, Fatehgarh Sahib, India
Geometric Modeling. Mesh Decimation. Mesh Decimation. Applications. Copyright 2010 Gotsman, Pauly Page 1. Oversampled 3D scan data
 Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Copyright 2010 Gotsman, Pauly Page 1 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies
Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Copyright 2010 Gotsman, Pauly Page 1 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies
Point Cloud Denoising
 Point Cloud Denoising Boris Mederos Luiz Velho Luiz Henrique de Figueiredo IMPA Instituto de Matemática Pura e Aplicada Estrada Dona Castorina 110, 22461-320 Rio Me Janeiro, RJ, Brazil boris@impa.br lvelho@impa.br
Point Cloud Denoising Boris Mederos Luiz Velho Luiz Henrique de Figueiredo IMPA Instituto de Matemática Pura e Aplicada Estrada Dona Castorina 110, 22461-320 Rio Me Janeiro, RJ, Brazil boris@impa.br lvelho@impa.br
Geodesic Paths on Triangular Meshes
 Geodesic Paths on Triangular Meshes DIMAS MARTÍNEZ, LUIZ VELHO, PAULO CEZAR CARVALHO IMPA Instituto Nacional de Matemática Pura e Aplicada - Estrada Dona Castorina, 110, 22460-320 Rio de Janeiro, RJ, Brasil
Geodesic Paths on Triangular Meshes DIMAS MARTÍNEZ, LUIZ VELHO, PAULO CEZAR CARVALHO IMPA Instituto Nacional de Matemática Pura e Aplicada - Estrada Dona Castorina, 110, 22460-320 Rio de Janeiro, RJ, Brasil
Geometric and Solid Modeling. Problems
 Geometric and Solid Modeling Problems Define a Solid Define Representation Schemes Devise Data Structures Construct Solids Page 1 Mathematical Models Points Curves Surfaces Solids A shape is a set of Points
Geometric and Solid Modeling Problems Define a Solid Define Representation Schemes Devise Data Structures Construct Solids Page 1 Mathematical Models Points Curves Surfaces Solids A shape is a set of Points
Interpolatory 3-Subdivision
 EUROGRAPHICS 2000 / M. Gross and F.R.A. Hopgood (Guest Editors) Volume 19 (2000), Number 3 Interpolatory 3-Subdivision U. Labsik G. Greiner Computer Graphics Group University of Erlangen-Nuremberg Am Weichselgarten
EUROGRAPHICS 2000 / M. Gross and F.R.A. Hopgood (Guest Editors) Volume 19 (2000), Number 3 Interpolatory 3-Subdivision U. Labsik G. Greiner Computer Graphics Group University of Erlangen-Nuremberg Am Weichselgarten
Comparative Study of Combinatorial 3D Reconstruction Algorithms
 Comparative Study of Combinatorial 3D Reconstruction Algorithms Abdelaaziz MAHDAOUI #1, Aziz BOUAZI *2, Abdallah. MARHRAOUI HSAINI *2, El Hassan SBAI *2 # Department of Physics, Faculty of Science, University
Comparative Study of Combinatorial 3D Reconstruction Algorithms Abdelaaziz MAHDAOUI #1, Aziz BOUAZI *2, Abdallah. MARHRAOUI HSAINI *2, El Hassan SBAI *2 # Department of Physics, Faculty of Science, University
Surface reconstruction based on a dynamical system
 EUROGRAPHICS 2002 / G. Drettakis and H.-P. Seidel (Guest Editors) Volume 21 (2002), Number 3 Surface reconstruction based on a dynamical system N.N. Abstract We present an efficient algorithm that computes
EUROGRAPHICS 2002 / G. Drettakis and H.-P. Seidel (Guest Editors) Volume 21 (2002), Number 3 Surface reconstruction based on a dynamical system N.N. Abstract We present an efficient algorithm that computes
Geometric Modeling. Bing-Yu Chen National Taiwan University The University of Tokyo
 Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo Surface Simplification Motivation Basic Idea of LOD Discrete LOD Continuous LOD Simplification Problem Characteristics
Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo Surface Simplification Motivation Basic Idea of LOD Discrete LOD Continuous LOD Simplification Problem Characteristics
Mesh Repairing and Simplification. Gianpaolo Palma
 Mesh Repairing and Simplification Gianpaolo Palma Mesh Repairing Removal of artifacts from geometric model such that it becomes suitable for further processing Input: a generic 3D model Output: (hopefully)a
Mesh Repairing and Simplification Gianpaolo Palma Mesh Repairing Removal of artifacts from geometric model such that it becomes suitable for further processing Input: a generic 3D model Output: (hopefully)a
Feature Extraction for Illustrating 3D Stone Tools from Unorganized Point Clouds
 Feature Extraction for Illustrating 3D Stone Tools from Unorganized Point Clouds Enkhbayar Altantsetseg 1) Yuta Muraki 2) Katsutsugu Matsuyama 2) Fumito Chiba 3) Kouichi Konno 2) 1) Graduate School of
Feature Extraction for Illustrating 3D Stone Tools from Unorganized Point Clouds Enkhbayar Altantsetseg 1) Yuta Muraki 2) Katsutsugu Matsuyama 2) Fumito Chiba 3) Kouichi Konno 2) 1) Graduate School of
SURFACE RECONSTRUCTION FROM MULTI-VALUED GRID DATA
 4 th International Conference on Mechanical Engineering, December 26-28, 2001, Dhaka, Bangladesh/pp. VII 29-33 SURFACE RECONSTRUCTION FROM MULTI-VALUED GRID DATA S. Adithya and Dibakar Sen* Department
4 th International Conference on Mechanical Engineering, December 26-28, 2001, Dhaka, Bangladesh/pp. VII 29-33 SURFACE RECONSTRUCTION FROM MULTI-VALUED GRID DATA S. Adithya and Dibakar Sen* Department
Mesh Decimation. Mark Pauly
 Mesh Decimation Mark Pauly Applications Oversampled 3D scan data ~150k triangles ~80k triangles Mark Pauly - ETH Zurich 280 Applications Overtessellation: E.g. iso-surface extraction Mark Pauly - ETH Zurich
Mesh Decimation Mark Pauly Applications Oversampled 3D scan data ~150k triangles ~80k triangles Mark Pauly - ETH Zurich 280 Applications Overtessellation: E.g. iso-surface extraction Mark Pauly - ETH Zurich
Computational Geometry
 Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
A THINNING ALGORITHM FOR TOPOLOGICALLY CORRECT 3D SURFACE RECONSTRUCTION
 A THINNING ALGORITHM FOR TOPOLOGICALLY CORRECT 3D SURFACE RECONSTRUCTION Leonid Tcherniavski Department of Informatics University of Hamburg tcherniavski@informatik.uni-hamburg.de ABSTRACT The existing
A THINNING ALGORITHM FOR TOPOLOGICALLY CORRECT 3D SURFACE RECONSTRUCTION Leonid Tcherniavski Department of Informatics University of Hamburg tcherniavski@informatik.uni-hamburg.de ABSTRACT The existing
A Fast and Efficient Projection-Based Approach for Surface Reconstruction
 A Fast and Efficient Projection-Based Approach for Surface econstruction M. GOPI 1, SHANKA KISHNAN 2 1 Univ. of California, Irvine gopi@ics.uci.edu 2 AT&T Labs - esearch krishnas@research.att.com Abstract.
A Fast and Efficient Projection-Based Approach for Surface econstruction M. GOPI 1, SHANKA KISHNAN 2 1 Univ. of California, Irvine gopi@ics.uci.edu 2 AT&T Labs - esearch krishnas@research.att.com Abstract.
The Medial Axis of the Union of Inner Voronoi Balls in the Plane
 The Medial Axis of the Union of Inner Voronoi Balls in the Plane Joachim Giesen a, Balint Miklos b,, Mark Pauly b a Max-Planck Institut für Informatik, Saarbrücken, Germany b Applied Geometry Group, ETH
The Medial Axis of the Union of Inner Voronoi Balls in the Plane Joachim Giesen a, Balint Miklos b,, Mark Pauly b a Max-Planck Institut für Informatik, Saarbrücken, Germany b Applied Geometry Group, ETH
Texture Blending to Point Sampled Geometry Jose Luiz Soares Luz, Paulo Cezar Carvalho, Luiz Velho. Technical Report TR Relatório Técnico
 Laboratório VISGRAF Instituto de Matemática Pura e Aplicada Texture Blending to Point Sampled Geometry Jose Luiz Soares Luz, Paulo Cezar Carvalho, Luiz Velho Technical Report TR-2004-06 Relatório Técnico
Laboratório VISGRAF Instituto de Matemática Pura e Aplicada Texture Blending to Point Sampled Geometry Jose Luiz Soares Luz, Paulo Cezar Carvalho, Luiz Velho Technical Report TR-2004-06 Relatório Técnico
Subdivision. Outline. Key Questions. Subdivision Surfaces. Advanced Computer Graphics (Spring 2013) Video: Geri s Game (outside link)
 Video: Geri s Game (outside link)") Advanced Computer Graphics (Spring 03) CS 83, Lecture 7: Subdivision Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs83/sp3 Slides courtesy of Szymon Rusinkiewicz, James O Brien with material from Denis
Advanced Computer Graphics (Spring 03) CS 83, Lecture 7: Subdivision Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs83/sp3 Slides courtesy of Szymon Rusinkiewicz, James O Brien with material from Denis
Voronoi Diagram. Xiao-Ming Fu
 Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass
 Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
A Fast and Efficient Projection-Based Approach for Surface Reconstruction
 A Fast and Efficient Projection-Based Approach for Surface econstruction M. GOPI, SHANKA KISHNAN Univ. of California, Irvine gopi@ics.uci.edu AT&T Labs - esearch krishnas@research.att.com Abstract. We
A Fast and Efficient Projection-Based Approach for Surface econstruction M. GOPI, SHANKA KISHNAN Univ. of California, Irvine gopi@ics.uci.edu AT&T Labs - esearch krishnas@research.att.com Abstract. We
Curve Corner Cutting
 Subdivision ision Techniqueses Spring 2010 1 Curve Corner Cutting Take two points on different edges of a polygon and join them with a line segment. Then, use this line segment to replace all vertices
Subdivision ision Techniqueses Spring 2010 1 Curve Corner Cutting Take two points on different edges of a polygon and join them with a line segment. Then, use this line segment to replace all vertices
A Unified Projection Operator for Moving Least Squares Surfaces
 EUROGRAPHICS 2007 / D. Cohen-Or and P. Slavík (Guest Editors) Volume 26 (2007), Number 3 A Unified Projection Operator for Moving Least Squares Surfaces Paper 1300 Abstract Moving-Least Squares (MLS) surfaces
EUROGRAPHICS 2007 / D. Cohen-Or and P. Slavík (Guest Editors) Volume 26 (2007), Number 3 A Unified Projection Operator for Moving Least Squares Surfaces Paper 1300 Abstract Moving-Least Squares (MLS) surfaces
Technical Report. Removing polar rendering artifacts in subdivision surfaces. Ursula H. Augsdörfer, Neil A. Dodgson, Malcolm A. Sabin.
 Technical Report UCAM-CL-TR-689 ISSN 1476-2986 Number 689 Computer Laboratory Removing polar rendering artifacts in subdivision surfaces Ursula H. Augsdörfer, Neil A. Dodgson, Malcolm A. Sabin June 2007
Technical Report UCAM-CL-TR-689 ISSN 1476-2986 Number 689 Computer Laboratory Removing polar rendering artifacts in subdivision surfaces Ursula H. Augsdörfer, Neil A. Dodgson, Malcolm A. Sabin June 2007
Geometry Processing & Geometric Queries. Computer Graphics CMU /15-662
 Geometry Processing & Geometric Queries Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans,
Geometry Processing & Geometric Queries Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans,
Fast Stellar Mesh Simplification
 Fast Stellar Mesh Simplification ANTÔNIO W. VIEIRA 1,2, LUIZ VELHO 3, HÉLIO LOPES 1, GEOVAN TAVARES 1 AND THOMAS LEWINER 1,4 1 PUC Rio Laboratório Matmídia Rio de Janeiro 2 UNIMONTES CCET Montes Claros
Fast Stellar Mesh Simplification ANTÔNIO W. VIEIRA 1,2, LUIZ VELHO 3, HÉLIO LOPES 1, GEOVAN TAVARES 1 AND THOMAS LEWINER 1,4 1 PUC Rio Laboratório Matmídia Rio de Janeiro 2 UNIMONTES CCET Montes Claros
A Unified Projection Operator for Moving Least Squares Surfaces SCI Institute Tech Report UUSCI
 A Unified Projection Operator for Moving Least Squares Surfaces SCI Institute Tech Report UUSCI-2007-006 Tilo Ochotta Carlos Scheidegger John Schreiner Yuri Lima Robert M. Kirby Claudio Silva April 25,
A Unified Projection Operator for Moving Least Squares Surfaces SCI Institute Tech Report UUSCI-2007-006 Tilo Ochotta Carlos Scheidegger John Schreiner Yuri Lima Robert M. Kirby Claudio Silva April 25,
Computing geodesics on triangular meshes $
 Computers & Graphics 29 (2005) 667 675 www.elsevier.com/locate/cag Computing geodesics on triangular meshes $ Dimas Martı nez a,b,, Luiz Velho a, Paulo C. Carvalho a a IMPA Instituto Nacional de Matemática
Computers & Graphics 29 (2005) 667 675 www.elsevier.com/locate/cag Computing geodesics on triangular meshes $ Dimas Martı nez a,b,, Luiz Velho a, Paulo C. Carvalho a a IMPA Instituto Nacional de Matemática
Final Project, Digital Geometry Processing
 Final Project, Digital Geometry Processing Shayan Hoshyari Student #: 81382153 December 2016 Introduction In this project an adaptive surface remesher has been developed based on the paper [1]. An algorithm
Final Project, Digital Geometry Processing Shayan Hoshyari Student #: 81382153 December 2016 Introduction In this project an adaptive surface remesher has been developed based on the paper [1]. An algorithm
A New Voronoi-Based Surface Reconstruction Algorithm
 A New Voronoi-Based Surface Reconstruction Algorithm Nina Amenta UT - Austin Marshall Bern Xerox PARC Manolis Kamvysselis M.I.T. Abstract We describe our experience with a new algorithm for the reconstruction
A New Voronoi-Based Surface Reconstruction Algorithm Nina Amenta UT - Austin Marshall Bern Xerox PARC Manolis Kamvysselis M.I.T. Abstract We describe our experience with a new algorithm for the reconstruction
Subdivision Curves and Surfaces: An Introduction
 Subdivision Curves and Surfaces: An Introduction Corner Cutting De Casteljau s and de Boor s algorithms all use corner-cutting procedures. Corner cutting can be local or non-local. A cut is local if it
Subdivision Curves and Surfaces: An Introduction Corner Cutting De Casteljau s and de Boor s algorithms all use corner-cutting procedures. Corner cutting can be local or non-local. A cut is local if it
Estimating Geometry and Topology from Voronoi Diagrams
 Estimating Geometry and Topology from Voronoi Diagrams Tamal K. Dey The Ohio State University Tamal Dey OSU Chicago 07 p.1/44 Voronoi diagrams Tamal Dey OSU Chicago 07 p.2/44 Voronoi diagrams Tamal Dey
Estimating Geometry and Topology from Voronoi Diagrams Tamal K. Dey The Ohio State University Tamal Dey OSU Chicago 07 p.1/44 Voronoi diagrams Tamal Dey OSU Chicago 07 p.2/44 Voronoi diagrams Tamal Dey
Surface Reconstruction with MLS
 Surface Reconstruction with MLS Tobias Martin CS7960, Spring 2006, Feb 23 Literature An Adaptive MLS Surface for Reconstruction with Guarantees, T. K. Dey and J. Sun A Sampling Theorem for MLS Surfaces,
Surface Reconstruction with MLS Tobias Martin CS7960, Spring 2006, Feb 23 Literature An Adaptive MLS Surface for Reconstruction with Guarantees, T. K. Dey and J. Sun A Sampling Theorem for MLS Surfaces,
Robust Moving Least-squares Fitting with Sharp Features
 Survey of Methods in Computer Graphics: Robust Moving Least-squares Fitting with Sharp Features S. Fleishman, D. Cohen-Or, C. T. Silva SIGGRAPH 2005. Method Pipeline Input: Point to project on the surface.
Survey of Methods in Computer Graphics: Robust Moving Least-squares Fitting with Sharp Features S. Fleishman, D. Cohen-Or, C. T. Silva SIGGRAPH 2005. Method Pipeline Input: Point to project on the surface.
Parameterization of Triangular Meshes with Virtual Boundaries
 Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Topological Issues in Hexahedral Meshing
 Topological Issues in Hexahedral Meshing David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science Outline I. What is meshing? Problem statement Types of mesh Quality issues
Topological Issues in Hexahedral Meshing David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science Outline I. What is meshing? Problem statement Types of mesh Quality issues
Surface Parameterization
 Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
UNIVERSITY OF CALGARY. Subdivision Surfaces. Advanced Geometric Modeling Faramarz Samavati
 Subdivision Surfaces Surfaces Having arbitrary Topologies Tensor Product Surfaces Non Tensor Surfaces We can t find u-curves and v-curves in general surfaces General Subdivision Coarse mesh Subdivision
Subdivision Surfaces Surfaces Having arbitrary Topologies Tensor Product Surfaces Non Tensor Surfaces We can t find u-curves and v-curves in general surfaces General Subdivision Coarse mesh Subdivision
Performance analysis of different surface reconstruction algorithms for 3D reconstruction of outdoor objects from their digital images
 DOI 10.1186/s40064-016-2425-9 RESEARCH Open Access Performance analysis of different surface reconstruction algorithms for 3D reconstruction of outdoor objects from their digital images Abhik Maiti * and
DOI 10.1186/s40064-016-2425-9 RESEARCH Open Access Performance analysis of different surface reconstruction algorithms for 3D reconstruction of outdoor objects from their digital images Abhik Maiti * and
Curvature-Adaptive Remeshing with Feature Preservation of Manifold Triangle Meshes with Boundary
 Curvature-Adaptive Remeshing with Feature Preservation of Manifold Triangle Meshes with Boundary Master s Project Tanja Munz Master of Science Computer Animation and Visual Effects 24th August, 2015 Abstract
Curvature-Adaptive Remeshing with Feature Preservation of Manifold Triangle Meshes with Boundary Master s Project Tanja Munz Master of Science Computer Animation and Visual Effects 24th August, 2015 Abstract
Quadratic and cubic b-splines by generalizing higher-order voronoi diagrams
 Quadratic and cubic b-splines by generalizing higher-order voronoi diagrams Yuanxin Liu and Jack Snoeyink Joshua Levine April 18, 2007 Computer Science and Engineering, The Ohio State University 1 / 24
Quadratic and cubic b-splines by generalizing higher-order voronoi diagrams Yuanxin Liu and Jack Snoeyink Joshua Levine April 18, 2007 Computer Science and Engineering, The Ohio State University 1 / 24
A Robust Procedure to Eliminate Degenerate Faces from Triangle Meshes
 A Robust Procedure to Eliminate Degenerate Faces from Triangle Meshes Mario Botsch, Leif P. Kobbelt Computer Graphics Group, RWTH Aachen, kobbelt,botsch @cs.rwth-aachen.de Abstract When using triangle
A Robust Procedure to Eliminate Degenerate Faces from Triangle Meshes Mario Botsch, Leif P. Kobbelt Computer Graphics Group, RWTH Aachen, kobbelt,botsch @cs.rwth-aachen.de Abstract When using triangle
Geodesic Bézier Curves: a Tool for Modeling on Triangulations
 Geodesic Bézier Curves: a Tool for Modeling on Triangulations Dimas Martínez Morera Paulo Cezar Carvalho Luiz Velho Instituto Nacional de MatemáticaPuraeAplicada-IMPA Estrada Dona Castorina, 110, Jardim
Geodesic Bézier Curves: a Tool for Modeling on Triangulations Dimas Martínez Morera Paulo Cezar Carvalho Luiz Velho Instituto Nacional de MatemáticaPuraeAplicada-IMPA Estrada Dona Castorina, 110, Jardim
Isotopic Approximation within a Tolerance Volume
 Isotopic Approximation within a Tolerance Volume Manish Mandad David Cohen-Steiner Pierre Alliez Inria Sophia Antipolis - 1 Goals and Motivation - 2 Goals and Motivation Input: Tolerance volume of a surface
Isotopic Approximation within a Tolerance Volume Manish Mandad David Cohen-Steiner Pierre Alliez Inria Sophia Antipolis - 1 Goals and Motivation - 2 Goals and Motivation Input: Tolerance volume of a surface
Möbius Transformations in Scientific Computing. David Eppstein
 Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Survey of Surface Reconstruction Algorithms
 Journal of Signal and Information Processing, 2014, 5, 63-79 Published Online August 2014 in SciRes. http://www.scirp.org/journal/jsip http://dx.doi.org/10.4236/jsip.2014.53009 Survey of Surface Reconstruction
Journal of Signal and Information Processing, 2014, 5, 63-79 Published Online August 2014 in SciRes. http://www.scirp.org/journal/jsip http://dx.doi.org/10.4236/jsip.2014.53009 Survey of Surface Reconstruction
A fast algorithm for manifold reconstruction of surfaces
 Proceedings of the IMProVe 2011 International conference on Innovative Methods in Product Design June 15 th 17 th, 2011, Venice, Italy L. Di Angelo (a), L. Giaccari (a) (a) Department of Industrial Engineering,
Proceedings of the IMProVe 2011 International conference on Innovative Methods in Product Design June 15 th 17 th, 2011, Venice, Italy L. Di Angelo (a), L. Giaccari (a) (a) Department of Industrial Engineering,
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
2) For any triangle edge not on the boundary, there is exactly one neighboring
 For any triangle edge not on the boundary, there is exactly one neighboring") Triangulating Trimmed NURBS Surfaces Chang Shu and Pierre Boulanger Abstract. This paper describes techniques for the piecewise linear approximation of trimmed NURBS surfaces. The problem, called surface
Triangulating Trimmed NURBS Surfaces Chang Shu and Pierre Boulanger Abstract. This paper describes techniques for the piecewise linear approximation of trimmed NURBS surfaces. The problem, called surface
Surface Reconstruction
 Eurographics Symposium on Geometry Processing (2006) Surface Reconstruction 2009.12.29 Some methods for surface reconstruction Classification 1. Based on Delaunay triangulation(or Voronoi diagram) Alpha
Eurographics Symposium on Geometry Processing (2006) Surface Reconstruction 2009.12.29 Some methods for surface reconstruction Classification 1. Based on Delaunay triangulation(or Voronoi diagram) Alpha
Lecture 25: Bezier Subdivision. And he took unto him all these, and divided them in the midst, and laid each piece one against another: Genesis 15:10
 Lecture 25: Bezier Subdivision And he took unto him all these, and divided them in the midst, and laid each piece one against another: Genesis 15:10 1. Divide and Conquer If we are going to build useful
Lecture 25: Bezier Subdivision And he took unto him all these, and divided them in the midst, and laid each piece one against another: Genesis 15:10 1. Divide and Conquer If we are going to build useful
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
March 10, :46 WSPC/INSTRUCTION FILE AspectRatioTopology ijsm
 International Journal of Shape Modeling c World Scientific Publishing Company ON 2D SOLID α-complexes OF POISSON DISC SAMPLINGS ESDRAS MEDEIROS, LUIZ VELHO IMPA Instituto de Matemática Pura e Apicada,
International Journal of Shape Modeling c World Scientific Publishing Company ON 2D SOLID α-complexes OF POISSON DISC SAMPLINGS ESDRAS MEDEIROS, LUIZ VELHO IMPA Instituto de Matemática Pura e Apicada,
Subdivision Surfaces
 Subdivision Surfaces 1 Geometric Modeling Sometimes need more than polygon meshes Smooth surfaces Traditional geometric modeling used NURBS Non uniform rational B-Spline Demo 2 Problems with NURBS A single
Subdivision Surfaces 1 Geometric Modeling Sometimes need more than polygon meshes Smooth surfaces Traditional geometric modeling used NURBS Non uniform rational B-Spline Demo 2 Problems with NURBS A single
Manipulating the Boundary Mesh
 Chapter 7. Manipulating the Boundary Mesh The first step in producing an unstructured grid is to define the shape of the domain boundaries. Using a preprocessor (GAMBIT or a third-party CAD package) you
Chapter 7. Manipulating the Boundary Mesh The first step in producing an unstructured grid is to define the shape of the domain boundaries. Using a preprocessor (GAMBIT or a third-party CAD package) you
CGAL. Mesh Simplification. (Slides from Tom Funkhouser, Adam Finkelstein)
") CGAL Mesh Simplification (Slides from Tom Funkhouser, Adam Finkelstein) Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 In a nutshell Problem: Meshes have too many polygons for storage, rendering,
CGAL Mesh Simplification (Slides from Tom Funkhouser, Adam Finkelstein) Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 In a nutshell Problem: Meshes have too many polygons for storage, rendering,
Scanning Real World Objects without Worries 3D Reconstruction
 Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Adaptive Mesh Extraction using Simplification and Refinement
 Adaptive Mesh Extraction using Simplification and Refinement Adelailson Peixoto and Luiz Velho Abstract. This work presents a method for multiresolution mesh extraction with important mathematical properties.
Adaptive Mesh Extraction using Simplification and Refinement Adelailson Peixoto and Luiz Velho Abstract. This work presents a method for multiresolution mesh extraction with important mathematical properties.
A Hole-Filling Algorithm for Triangular Meshes. Abstract
 A Hole-Filling Algorithm for Triangular Meshes Lavanya Sita Tekumalla, Elaine Cohen UUCS-04-019 School of Computing University of Utah Salt Lake City, UT 84112 USA December 20, 2004 Abstract Data obtained
A Hole-Filling Algorithm for Triangular Meshes Lavanya Sita Tekumalla, Elaine Cohen UUCS-04-019 School of Computing University of Utah Salt Lake City, UT 84112 USA December 20, 2004 Abstract Data obtained
Voronoi diagram and Delaunay triangulation
 Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY
 13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY Lecture 23 Dr. W. Cho Prof. N. M. Patrikalakis Copyright c 2003 Massachusetts Institute of Technology Contents 23 F.E. and B.E. Meshing Algorithms 2
13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY Lecture 23 Dr. W. Cho Prof. N. M. Patrikalakis Copyright c 2003 Massachusetts Institute of Technology Contents 23 F.E. and B.E. Meshing Algorithms 2
Outline of the presentation
 Surface Reconstruction Petra Surynková Charles University in Prague Faculty of Mathematics and Physics petra.surynkova@mff.cuni.cz Outline of the presentation My work up to now Surfaces of Building Practice
Surface Reconstruction Petra Surynková Charles University in Prague Faculty of Mathematics and Physics petra.surynkova@mff.cuni.cz Outline of the presentation My work up to now Surfaces of Building Practice
Semi-Regular 4 8 Refinement and Box Spline Surfaces
 Semi-Regular 4 8 Refinement and Box Spline Surfaces LUIZ VELHO IMPA Instituto de Matemática Pura e Aplicada, lvelho@visgraf.impa.br Abstract. In this paper we introduce a new mesh refinement method for
Semi-Regular 4 8 Refinement and Box Spline Surfaces LUIZ VELHO IMPA Instituto de Matemática Pura e Aplicada, lvelho@visgraf.impa.br Abstract. In this paper we introduce a new mesh refinement method for
05 - Surfaces. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Daniele Panozzo
 05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
Shape from LIDAR Data. Univ. of Florida
 Shape from LIDAR Data Yusuf Sahillioğlu Alper Üngör Univ. of Florida 1. Introduction LIght Detection And Ranging systems, LIDAR, are capable of acquiring data to produce accurate digital elevation models
Shape from LIDAR Data Yusuf Sahillioğlu Alper Üngör Univ. of Florida 1. Introduction LIght Detection And Ranging systems, LIDAR, are capable of acquiring data to produce accurate digital elevation models
Fast 3D surface reconstruction from point clouds using graph-based fronts propagation
 Fast 3D surface reconstruction from point clouds using graph-based fronts propagation Abdallah El Chakik, Xavier Desquesnes, Abderrahim Elmoataz UCBN, GREYC - UMR CNRS 6972, 6.Bvd Marechal Juin, 14050
Fast 3D surface reconstruction from point clouds using graph-based fronts propagation Abdallah El Chakik, Xavier Desquesnes, Abderrahim Elmoataz UCBN, GREYC - UMR CNRS 6972, 6.Bvd Marechal Juin, 14050
Ternary Butterfly Subdivision
 Ternary Butterfly Subdivision Ruotian Ling a,b Xiaonan Luo b Zhongxian Chen b,c a Department of Computer Science, The University of Hong Kong b Computer Application Institute, Sun Yat-sen University c
Ternary Butterfly Subdivision Ruotian Ling a,b Xiaonan Luo b Zhongxian Chen b,c a Department of Computer Science, The University of Hong Kong b Computer Application Institute, Sun Yat-sen University c
A General Simplification Algorithm
 A General Simplification Algorithm Boštjan Pivec, Vid Domiter Abstract In this article a new general algorithm for triangular mesh simplification is proposed. The algorithm extends Krivograd's work from
A General Simplification Algorithm Boštjan Pivec, Vid Domiter Abstract In this article a new general algorithm for triangular mesh simplification is proposed. The algorithm extends Krivograd's work from
Multiresolution Computation of Conformal Structures of Surfaces
 Multiresolution Computation of Conformal Structures of Surfaces Xianfeng Gu Yalin Wang Shing-Tung Yau Division of Engineering and Applied Science, Harvard University, Cambridge, MA 0138 Mathematics Department,
Multiresolution Computation of Conformal Structures of Surfaces Xianfeng Gu Yalin Wang Shing-Tung Yau Division of Engineering and Applied Science, Harvard University, Cambridge, MA 0138 Mathematics Department,
Digital Geometry Processing. Computer Graphics CMU /15-662
 Digital Geometry Processing Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans, not fins
Digital Geometry Processing Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans, not fins
Ray Tracing Point Set Surfaces
 Ray Tracing Point Set Surfaces Anders Adamson Marc Alexa TU Darmstadt, GRIS Fraunhoferstr. 5, 64283 Darmstadt {aadamson,alexa}@gris.informatik.tu-darmstadt.de Abstract Point set surfaces are a smooth manifold
Ray Tracing Point Set Surfaces Anders Adamson Marc Alexa TU Darmstadt, GRIS Fraunhoferstr. 5, 64283 Darmstadt {aadamson,alexa}@gris.informatik.tu-darmstadt.de Abstract Point set surfaces are a smooth manifold
Fan-Meshes: A Geometric Primitive for Point-based Description of 3D Models and Scenes
 Fan-Meshes: A Geometric Primitive for Point-based Description of 3D Models and Scenes Xiaotian Yan, Fang Meng, Hongbin Zha National Laboratory on Machine Perception Peking University, Beijing, P. R. China
Fan-Meshes: A Geometric Primitive for Point-based Description of 3D Models and Scenes Xiaotian Yan, Fang Meng, Hongbin Zha National Laboratory on Machine Perception Peking University, Beijing, P. R. China
Surfaces, meshes, and topology
 Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
A Global Laplacian Smoothing Approach with Feature Preservation
 A Global Laplacian Smoothing Approach with Feature Preservation hongping Ji Ligang Liu Guojin Wang Department of Mathematics State Key Lab of CAD&CG hejiang University Hangzhou, 310027 P.R. China jzpboy@yahoo.com.cn,
A Global Laplacian Smoothing Approach with Feature Preservation hongping Ji Ligang Liu Guojin Wang Department of Mathematics State Key Lab of CAD&CG hejiang University Hangzhou, 310027 P.R. China jzpboy@yahoo.com.cn,
Subdivision curves and surfaces. Brian Curless CSE 557 Fall 2015
 Subdivision curves and surfaces Brian Curless CSE 557 Fall 2015 1 Reading Recommended: Stollnitz, DeRose, and Salesin. Wavelets for Computer Graphics: Theory and Applications, 1996, section 6.1-6.3, 10.2,
Subdivision curves and surfaces Brian Curless CSE 557 Fall 2015 1 Reading Recommended: Stollnitz, DeRose, and Salesin. Wavelets for Computer Graphics: Theory and Applications, 1996, section 6.1-6.3, 10.2,
Fathi El-Yafi Project and Software Development Manager Engineering Simulation
 An Introduction to Mesh Generation Algorithms Part 2 Fathi El-Yafi Project and Software Development Manager Engineering Simulation 21-25 April 2008 1 Overview Adaptive Meshing: Remeshing Decimation Optimization
An Introduction to Mesh Generation Algorithms Part 2 Fathi El-Yafi Project and Software Development Manager Engineering Simulation 21-25 April 2008 1 Overview Adaptive Meshing: Remeshing Decimation Optimization
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Postprocessing of Compressed 3D Graphic Data
 Journal of Visual Communication and Image Representation 11, 80 92 (2000) doi:10.1006/jvci.1999.0430, available online at http://www.idealibrary.com on Postprocessing of Compressed 3D Graphic Data Ka Man
Journal of Visual Communication and Image Representation 11, 80 92 (2000) doi:10.1006/jvci.1999.0430, available online at http://www.idealibrary.com on Postprocessing of Compressed 3D Graphic Data Ka Man
Extracting Surface Representations From Rim Curves
 Extracting Surface Representations From Rim Curves Hai Chen 1, Kwan-Yee K. Wong 2, Chen Liang 2, and Yue Chen 1 1 College of Software Technology, Zhejiang University, Hangzhou, Zhejiang, China 310027 chenhai@gmail.com
Extracting Surface Representations From Rim Curves Hai Chen 1, Kwan-Yee K. Wong 2, Chen Liang 2, and Yue Chen 1 1 College of Software Technology, Zhejiang University, Hangzhou, Zhejiang, China 310027 chenhai@gmail.com
MARCHING CUBES AND VARIANTS
 CHAPTER MARCHING CUBES AND VARIANTS In the introduction, we mentioned four different approaches to isosurface construction. In this chapter, we describe one of those approaches to isosurface construction,
CHAPTER MARCHING CUBES AND VARIANTS In the introduction, we mentioned four different approaches to isosurface construction. In this chapter, we describe one of those approaches to isosurface construction,
Computational Geometry Lecture Delaunay Triangulation
 Computational Geometry Lecture Delaunay Triangulation INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 7.12.2015 1 Modelling a Terrain Sample points p = (x p, y p, z p ) Projection π(p) = (p
Computational Geometry Lecture Delaunay Triangulation INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 7.12.2015 1 Modelling a Terrain Sample points p = (x p, y p, z p ) Projection π(p) = (p
Tiling Three-Dimensional Space with Simplices. Shankar Krishnan AT&T Labs - Research
 Tiling Three-Dimensional Space with Simplices Shankar Krishnan AT&T Labs - Research What is a Tiling? Partition of an infinite space into pieces having a finite number of distinct shapes usually Euclidean
Tiling Three-Dimensional Space with Simplices Shankar Krishnan AT&T Labs - Research What is a Tiling? Partition of an infinite space into pieces having a finite number of distinct shapes usually Euclidean