More Thoughts on Total Propagated Uncertainty for Bathymetric Lidar
|
|
|
- Cameron Webster
- 5 years ago
- Views:
Transcription



1 More Thoughts on Total Propagated Uncertainty for Bathymetric Lidar Grady Tuell, Ph.D. GTRI Electro-Optical Systems Lab June 11,


2 30 Years of Atmospheric Lidar Integrated Atmospheric Characterization System (IACS) 3 integrated lidars characterizing turbulence, aerosols, and water vapor in vicinity of HEL. 355 nm imaging lidar for profiling refractive turbulence 355 nm Raman lidar for profiling water vapor GTRI/ EOSL - 2 aerosol lidar operating at both 1.06 and microns.
 4 3 2 1 Range Corrected Backscatter Signal 0.8 0.6 0.4 0.")
 Range (m) Transmittance to range 0.025 Aerosol Extinction (1/km) 0.02 0.")
3 Integrated Atmospheric Characterization System (IACS) GTRI/ EOSL - 3 Lidar Signal vs. range and time time Lidar Signal vs. range at one time 5 1 Altitude AGL (km) Range Corrected Backscatter Signal time (sec) 0.03 Time Extinction coefficient vs. range Range (meters) Range (m) Transmittance to range Aerosol Extinction (1/km) Range (meters) Range (m)



4 Fledgling program in Bathymetric Lidar GTRI/ EOSL - 4 Large Scale Simulations to study TPU Real-time computation of coordinates and TPU Pathfinder lidar


5 TPU Procedure Compute TPU matrix thru propagation of variance GTRI/ EOSL - 5 5
 formed with the partial derivatives GTRI/ EOSL - 6")
6 Propagation for non-linear functions Measurements cofactor matrix (11x11) formed with the variances and covariances of the measurements Jacobian matrix (3x11) formed with the partial derivatives GTRI/ EOSL - 6 6

7 GTRI/ EOSL - 7 Measurement Matrix (Σ M )..? navigation pointing calibration ranging performance environment
8 Example: effect of variance on incidence angle at sea surface GTRI/ EOSL variance in "in-water" incidence angle 6 SAS99 (m) sigma = 0 sigma = 2 deg sigma = 3 deg sigma = 4 deg Path length in water (m)
9 GTRI/ EOSL - 9 Rapid Simulation of Waveforms Simulated bottom returns with different FOV Loss functions We developed a procedure to rapidly compute FOV loss - by parameterizing in terms of FOV and c 1 Eq (2): Original FOV Loss formulation from Kopilevich, Feygels, Tuell, & Surkov, (2005). Eq (4): FOV Loss reformulation from Carr & Tuell (2014). With new technique, we generate 1000 waveforms in 20 sec. (1650x faster than Eq (2)). 1 D. Carr & G. Tuell, Estimating Field of View Loss in Bathymetric Lidar: Application to Large-Scale Simulations, Applied Optics, (2014).
10 GTRI/ EOSL - 10 Examples: Analysis of Variance Compare performance of competing system designs Analyze system performance in various water conditions Higher energy does not result in smaller variance Higher attenuation does not result in larger variance.but probability of detection affects results D. Carr & G. Tuell, Estimating Field of View Loss in Bathymetric Lidar: Application to Large-Scale Simulations, Applied Optics, (2014).
11 GTRI/ EOSL - 11 Some progress navigation pointing calibration ranging variance 1)varies with POD as E o and c vary 2)varies with rugosity and ρ 3) FOV 4) algorithms Environment 1) Wind speed and direction 2) Depth





12 GTRI pathfinder real-time lidar GTRI/ EOSL - 12

13 GTRI pathfinder real-time lidar GTRI/ EOSL - 13


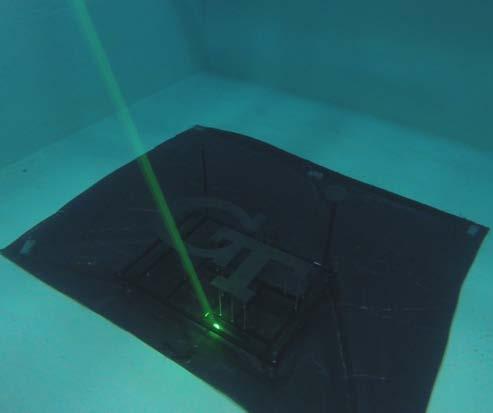
14 GTRI pathfinder real-time lidar GTRI/ EOSL - 14 Processing software developed with simulated waveforms successfully processed waveforms from Pathfinder Spectralon target Circular Disk Target GT Target Target Mounting Frame GT Target with Mounting Frame Deployed in Water Tank 3D Point Cloud Reconstruction


15 Real-time TPU GTRI/ EOSL - 15 We could not demonstate real-time computation at the water tank, but.

16 GTRI/ EOSL - 16 Emulating Real-Time Acquisition 3.7M PPS with TPU written to media GT Pathfinder waveforms from water 20kHz NVIDEA Tesla K20 Digitizer: M9703A ARB: M8190A
17 GTRI/ EOSL - 17 Latency diagram 20K waveforms per second 23K waveforms per second 22K waveforms per second Block of 1024 GPS, INS Continuous acquisition loop Digitizer/FPGA (Filtering, Smoothing, Interest Points, Ranging) CPU (data conversion) GPU (Coords + TPU) output Time(ms) 1024x1024 takes 51ms to be generated 1024x1024 block read into CPU RAM in 43.5ms Coordinates and TPU calculated, plus file output in 47ms

18 Agilent M9703A DC-coupled digitizer with a 12 bit resolution and 3.2GSPS sample rate. Easily-programmable onboard FPGA for every pair of analog channels with sufficient processing power for real-time coordinate and TPU computation. Development Environment : MentorGraphics HDL Author and ModelSim with Xilinx ISE (GTRI EOSL is a beta test site for these tools) Tuell, G., James, R., Ortman, R., Valenta, C., Carr, D., Zutty, J., Qualification Testing of the Agilent M9703A Digitizer for Use in a Bathy Lidar, IEEE IGARRS 2014, Quebec, July GTRI/ EOSL - 18



19 GTRI/ EOSL - 19 Next Steps: Focus on water surface Study the effects of micro and- macro surface structure on variance of refraction angle and inwater path length and on transfer functions for imaging.

20 GTRI/ EOSL - 20 Anticipated mods to Pathfinder Neutral Density Filter Aperture Stop Narrow Band Filter Beamsplitter for system characterization Fielded Receiver End of Fiber Bundle to PMT Neutral Density Filter Dichroic Beamsplitter 32x32 GmAPD Camera Array Redesigned Receiver Reduced Aperture Stop End of Fiber Bundle to PMT

 will go")
21 GTRI/ EOSL - 21 Optical Re-design of Pathfinder Transmitter Receiver Only minor optical and mechanical modifications will be needed 1064nm transmitter path will exit in 1 lens tubes here Princeton Lightwave GmAPD camera (without lens) will go here


22 2015 UNESCO International Year of Light
 Jun 24, 2014 (Tue) - Jun 27, 2014 (Fri) Atlanta (Georgia Tech Global Learning Center) (this is an onsite")
23 GTRI/ EOSL Course Title: Introduction to Laser Radar Program ID: DEF 3506P Subject: Infrared Training and Electro Optical Affiliated with the SENSIAC Education Program. Registration Deadline Section Dates Format & Location CEUs Fee Status Jun 24, 2014 (Tue) Jun 24, 2014 (Tue) - Jun 27, 2014 (Fri) Atlanta (Georgia Tech Global Learning Center) (this is an onsite course) 2.45 $1,495 OPEN Course Title: Atmospheric Lidar Engineering Program ID: DEF 3005P Subject: Infrared Training and Electro Optical Active Sections Atlanta (Georgia Tech Global Learning Center) (OPEN) Sep 30, 2014 (Tue) - Oct 3, 2014 (Fri) grady.tuell@gtri.gatech.edu
24 GTRI/ EOSL - 24 BACKUP SLIDES
25 GTRI/ EOSL - 25 Proxy function for FOV loss FOV Loss Using this proxy function we can simulate 1000 waveforms in 20 sec (vs. 8 hours) D. Carr and G. Tuell, Estimating Field-of-View Loss in Bathymetric Lidar: Application to Large-Scale Simulations, submitted to Applied Optics

26 GTRI/ EOSL - 26 How best to interpret TPE? Novatel, 2003, APN-029 Rev 1

27 Pathfinder : Real-time Experiments Current Gimbal allows for 90 degrees of azimuth rotation 27 27

28 Pathfinder : Mechanical Design FAZTEK Extruded Aluminum Frame Motorized Linear Stage Fixed Mounting 20 from the vertical-axis Inclinometer Transmitted Beam Motorized Rotary Stage Wedge Laser with Fans Receiver Telescope 28 28
Real-time lidar and TPU
 Real-time lidar and TPU MAPPS Winter Conference Palm Harbor Florida, January 13, 2017 Grady Tuell, Ph.D. A taxonomy for lidar R&D: 2017 3D Ideas, LLC. All Rights Reserved Real-time lidar and accuracy assessment:
Real-time lidar and TPU MAPPS Winter Conference Palm Harbor Florida, January 13, 2017 Grady Tuell, Ph.D. A taxonomy for lidar R&D: 2017 3D Ideas, LLC. All Rights Reserved Real-time lidar and accuracy assessment:
DELIVERABLE 2 SPECIALIZED NOVEL SOFTWARE FOR THE ACQUISITION AND ANALYSIS OF 6 DIFFERENT LIDAR SIGNALS IN REAL TIME
 DELIVERABLE 2 SPECIALIZED NOVEL SOFTWARE FOR THE ACQUISITION AND ANALYSIS OF 6 DIFFERENT LIDAR SIGNALS IN REAL TIME Project Title : Development of a 6-wavelength LIDAR system for the retrieval of the microphysical
DELIVERABLE 2 SPECIALIZED NOVEL SOFTWARE FOR THE ACQUISITION AND ANALYSIS OF 6 DIFFERENT LIDAR SIGNALS IN REAL TIME Project Title : Development of a 6-wavelength LIDAR system for the retrieval of the microphysical
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS
 CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR
 Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR Andres Vargas Integration Systems Engineer LAGF Mexico City, Mexico September 23th, 2014 1 Airborne Laser Scanning History and Evolution
Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR Andres Vargas Integration Systems Engineer LAGF Mexico City, Mexico September 23th, 2014 1 Airborne Laser Scanning History and Evolution
Mark Itzler. i t li
 Geiger mode APD Cameras for Single Photon 3D LIDAR Imaging Mark Itzler PrincetonLightwave Inc. mitzler@princetonlightwave.com i t li www.princetonlightwave.com Geiger mode APD attributes Et Extremely sensitive
Geiger mode APD Cameras for Single Photon 3D LIDAR Imaging Mark Itzler PrincetonLightwave Inc. mitzler@princetonlightwave.com i t li www.princetonlightwave.com Geiger mode APD attributes Et Extremely sensitive
Lecture 13. Lidar Data Inversion
 Lecture 13. Lidar Data Inversion Review Doppler lidar architecture Daytime capability of Na Doppler lidar Introduction Common raw data format Basic ideas (clues) for data inversion Preprocess Main process
Lecture 13. Lidar Data Inversion Review Doppler lidar architecture Daytime capability of Na Doppler lidar Introduction Common raw data format Basic ideas (clues) for data inversion Preprocess Main process
Lecture 24. Lidar Simulation
 Lecture 24. Lidar Simulation q Introduction q Lidar Modeling via Lidar Simulation & Error Analysis q Functions of Lidar Simulation and Error Analysis q How to Build up Lidar Simulation? q Range-resolved
Lecture 24. Lidar Simulation q Introduction q Lidar Modeling via Lidar Simulation & Error Analysis q Functions of Lidar Simulation and Error Analysis q How to Build up Lidar Simulation? q Range-resolved
Calibration of HY-2A Satellite Scatterometer with Ocean and Considerations of Calibration of CFOSAT Scatterometer
 Calibration of HY-2A Satellite Scatterometer with Ocean and Considerations of Calibration of CFOSAT Scatterometer Xiaolong Dong, Jintai Zhu, Risheng Yun and Di Zhu CAS Key Laboratory of Microwave Remote
Calibration of HY-2A Satellite Scatterometer with Ocean and Considerations of Calibration of CFOSAT Scatterometer Xiaolong Dong, Jintai Zhu, Risheng Yun and Di Zhu CAS Key Laboratory of Microwave Remote
Using LiDAR for Classification and
 Using LiDAR for Classification and Recognition of Particulate Matter in the Atmosphere M. Elbakary, K. Iftekharuddin, and K. AFRIFA ECE Dept., Old Dominion University, Norfolk, VA Outline Goals of the
Using LiDAR for Classification and Recognition of Particulate Matter in the Atmosphere M. Elbakary, K. Iftekharuddin, and K. AFRIFA ECE Dept., Old Dominion University, Norfolk, VA Outline Goals of the
Laboratory 6: Light and the Laser
 Laboratory 6: Light and the Laser WARNING NEVER LOOK DIRECTLY AT LASER LIGHT Index of Refraction: Snell's Law 1. Read the section on physical optics in some introductory physics text. 2. Set the semicircular
Laboratory 6: Light and the Laser WARNING NEVER LOOK DIRECTLY AT LASER LIGHT Index of Refraction: Snell's Law 1. Read the section on physical optics in some introductory physics text. 2. Set the semicircular
HawkEye III - A new deep penetrating bathymetric LIDAR system
 Please insert a picture (Insert, Picture, from file). Size according to grey field (10 cm x 25.4 cm). Scale picture: highlight, pull corner point Cut picture: highlight, choose the cutting icon from the
Please insert a picture (Insert, Picture, from file). Size according to grey field (10 cm x 25.4 cm). Scale picture: highlight, pull corner point Cut picture: highlight, choose the cutting icon from the
Laser Beacon Tracking for High-Accuracy Attitude Determination
 Laser Beacon Tracking for High-Accuracy Attitude Determination Tam Nguyen Massachusetts Institute of Technology 29 th AIAA/USU Conference on Small Satellites SSC15-VIII-2 08/12/2015 Outline Motivation
Laser Beacon Tracking for High-Accuracy Attitude Determination Tam Nguyen Massachusetts Institute of Technology 29 th AIAA/USU Conference on Small Satellites SSC15-VIII-2 08/12/2015 Outline Motivation
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Lecture 09. Lidar Simulation and Error Analysis Overview (1)
") Lecture 09. Lidar Simulation and Error Analysis Overview (1) Introduction Lidar Modeling via Lidar Simulation & Error Analysis Functions of Lidar Simulation and Error Analysis How to Build up Lidar Simulation?
Lecture 09. Lidar Simulation and Error Analysis Overview (1) Introduction Lidar Modeling via Lidar Simulation & Error Analysis Functions of Lidar Simulation and Error Analysis How to Build up Lidar Simulation?
Principles of the Global Positioning System Lecture 15" Propagation Medium: Neutral atmosphere" Basic atmospheric structure"
 12.540 Principles of the Global Positioning System Lecture 15" Prof. Thomas Herring" Room 54-820A; 253-5941" tah@mit.edu" http://geoweb.mit.edu/~tah/12.540 " Propagation Medium: Neutral atmosphere" Summary"
12.540 Principles of the Global Positioning System Lecture 15" Prof. Thomas Herring" Room 54-820A; 253-5941" tah@mit.edu" http://geoweb.mit.edu/~tah/12.540 " Propagation Medium: Neutral atmosphere" Summary"
Airborne LiDAR Data Acquisition for Forestry Applications. Mischa Hey WSI (Corvallis, OR)
") Airborne LiDAR Data Acquisition for Forestry Applications Mischa Hey WSI (Corvallis, OR) WSI Services Corvallis, OR Airborne Mapping: Light Detection and Ranging (LiDAR) Thermal Infrared Imagery 4-Band
Airborne LiDAR Data Acquisition for Forestry Applications Mischa Hey WSI (Corvallis, OR) WSI Services Corvallis, OR Airborne Mapping: Light Detection and Ranging (LiDAR) Thermal Infrared Imagery 4-Band
SF10 SF10. Features: The SF10 laser altimeter is ideal for automated landings and precision hovering.
 The is a compact, lightweight laser altimeter for above-groundlevel altitude measurement from small fixed wing or multi-rotor craft. The laser altimeter is ideal for automated landings and precision hovering.
The is a compact, lightweight laser altimeter for above-groundlevel altitude measurement from small fixed wing or multi-rotor craft. The laser altimeter is ideal for automated landings and precision hovering.
Experiment 6. Snell s Law. Use Snell s Law to determine the index of refraction of Lucite.
 Experiment 6 Snell s Law 6.1 Objectives Use Snell s Law to determine the index of refraction of Lucite. Observe total internal reflection and calculate the critical angle. Explain the basis of how optical
Experiment 6 Snell s Law 6.1 Objectives Use Snell s Law to determine the index of refraction of Lucite. Observe total internal reflection and calculate the critical angle. Explain the basis of how optical
CALIPSO Version 3 Data Products: Additions and Improvements
 CALIPSO Version 3 Data Products: Additions and Improvements Dave Winker and the CALIPSO team CALIPSO/CloudSat Science Team Meeting 28-31 July, Madison, WI 1 Version 3 Status Version 3 algorithms now used
CALIPSO Version 3 Data Products: Additions and Improvements Dave Winker and the CALIPSO team CALIPSO/CloudSat Science Team Meeting 28-31 July, Madison, WI 1 Version 3 Status Version 3 algorithms now used
Technical Specifications for High speed PIV and High speed PIV-PLIF system
 Technical Specifications for High speed PIV and High speed PIV-PLIF system MODULE A. HIGH SPEED PIV (3-C) A1. Double Cavity High Speed Laser (up to 10 khz): The vendor should provide Dual Head (DH) laser
Technical Specifications for High speed PIV and High speed PIV-PLIF system MODULE A. HIGH SPEED PIV (3-C) A1. Double Cavity High Speed Laser (up to 10 khz): The vendor should provide Dual Head (DH) laser
Synopsis of Risley Prism Beam Pointer
 Synopsis of Risley Prism Beam Pointer Mark T. Sullivan Lockheed Martin Space Systems Advanced Technology Center, 3251 Hanover Street, Palo Alto, CA 94304 mark.t.sullivan@lmco.com 650/424-2722 SUMMARY This
Synopsis of Risley Prism Beam Pointer Mark T. Sullivan Lockheed Martin Space Systems Advanced Technology Center, 3251 Hanover Street, Palo Alto, CA 94304 mark.t.sullivan@lmco.com 650/424-2722 SUMMARY This
NASA Miniature Inspection LADAR
 NASA Miniature Inspection LADAR Bradley Sallee SPEC 1 SPEC s Multi-Dimensional Imaging Programs NASA HD6D NRO HD6D AFRL LGSS Army 3D Change AFRL MST Army Imaging SAL DARPA AIRSS DARPA SUAVTL NASA Inspection
NASA Miniature Inspection LADAR Bradley Sallee SPEC 1 SPEC s Multi-Dimensional Imaging Programs NASA HD6D NRO HD6D AFRL LGSS Army 3D Change AFRL MST Army Imaging SAL DARPA AIRSS DARPA SUAVTL NASA Inspection
Mode-Field Diameter and Spot Size Measurements of Lensed and Tapered Specialty Fibers
 Mode-Field Diameter and Spot Size Measurements of Lensed and Tapered Specialty Fibers By Jeffrey L. Guttman, Ph.D., Director of Engineering, Ophir-Spiricon Abstract: The Mode-Field Diameter (MFD) and spot
Mode-Field Diameter and Spot Size Measurements of Lensed and Tapered Specialty Fibers By Jeffrey L. Guttman, Ph.D., Director of Engineering, Ophir-Spiricon Abstract: The Mode-Field Diameter (MFD) and spot
Refraction and Polarization of Light
 Chapter 9 Refraction and Polarization of Light Name: Lab Partner: Section: 9.1 Purpose The purpose of this experiment is to demonstrate several consequences of the fact that materials have di erent indexes
Chapter 9 Refraction and Polarization of Light Name: Lab Partner: Section: 9.1 Purpose The purpose of this experiment is to demonstrate several consequences of the fact that materials have di erent indexes
Polarization of light
 Polarization of light TWO WEIGHTS RECOMENDED READINGS 1) G. King: Vibrations and Waves, Ch.5, pp. 109-11. Wiley, 009. ) E. Hecht: Optics, Ch.4 and Ch.8. Addison Wesley, 00. 3) PASCO Instruction Manual
Polarization of light TWO WEIGHTS RECOMENDED READINGS 1) G. King: Vibrations and Waves, Ch.5, pp. 109-11. Wiley, 009. ) E. Hecht: Optics, Ch.4 and Ch.8. Addison Wesley, 00. 3) PASCO Instruction Manual
Mu lt i s p e c t r a l
 Viewing Angle Analyser Revolutionary system for full spectral and polarization measurement in the entire viewing angle EZContrastMS80 & EZContrastMS88 ADVANCED LIGHT ANALYSIS by Field iris Fourier plane
Viewing Angle Analyser Revolutionary system for full spectral and polarization measurement in the entire viewing angle EZContrastMS80 & EZContrastMS88 ADVANCED LIGHT ANALYSIS by Field iris Fourier plane
RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying. IR laser scanner channel OCTOBER 2015
 RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying with NEW optional IR laser scanner channel OCTOBER 2015 VQ 880 G Highlights excellently suited for combined hydrographic and topographic
RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying with NEW optional IR laser scanner channel OCTOBER 2015 VQ 880 G Highlights excellently suited for combined hydrographic and topographic
Refraction and Polarization of Light
 Chapter 9 Refraction and Polarization of Light Name: Lab Partner: Section: 9.1 Purpose The purpose of this experiment is to demonstrate several consequences of the fact that materials have di erent indexes
Chapter 9 Refraction and Polarization of Light Name: Lab Partner: Section: 9.1 Purpose The purpose of this experiment is to demonstrate several consequences of the fact that materials have di erent indexes
CHAPTER 2: THREE DIMENSIONAL TOPOGRAPHICAL MAPPING SYSTEM. Target Object
 CHAPTER 2: THREE DIMENSIONAL TOPOGRAPHICAL MAPPING SYSTEM 2.1 Theory and Construction Target Object Laser Projector CCD Camera Host Computer / Image Processor Figure 2.1 Block Diagram of 3D Areal Mapper
CHAPTER 2: THREE DIMENSIONAL TOPOGRAPHICAL MAPPING SYSTEM 2.1 Theory and Construction Target Object Laser Projector CCD Camera Host Computer / Image Processor Figure 2.1 Block Diagram of 3D Areal Mapper
A Comprehensive Model for Performance Prediction of Electro-Optical Systems
 A Comprehensive Model for Performance Prediction of Electro-Optical Systems Joseph J. Shirron and Thomas E. Giddings Metron, Inc. Suite 800, 11911 Freedom Drive Reston, VA 20190 phone: (703) 787-8700 fax:
A Comprehensive Model for Performance Prediction of Electro-Optical Systems Joseph J. Shirron and Thomas E. Giddings Metron, Inc. Suite 800, 11911 Freedom Drive Reston, VA 20190 phone: (703) 787-8700 fax:
2002 Intelligent Ground Vehicle Competition Design Report. Grizzly Oakland University
 2002 Intelligent Ground Vehicle Competition Design Report Grizzly Oakland University June 21, 2002 Submitted By: Matt Rizzo Brian Clark Brian Yurconis Jelena Nikolic I. ABSTRACT Grizzly is the product
2002 Intelligent Ground Vehicle Competition Design Report Grizzly Oakland University June 21, 2002 Submitted By: Matt Rizzo Brian Clark Brian Yurconis Jelena Nikolic I. ABSTRACT Grizzly is the product
Use of the Polarized Radiance Distribution Camera System in the RADYO Program
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Use of the Polarized Radiance Distribution Camera System in the RADYO Program Kenneth J. Voss Physics Department, University
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Use of the Polarized Radiance Distribution Camera System in the RADYO Program Kenneth J. Voss Physics Department, University
Metis M313. Narrow-Band High-End 1-Color Radiation Pyrometer
 Metis M313 Narrow-Band High-End 1-Color Radiation Pyrometer Pyrometer for non-contact temperature measurement in short-wave and narrow-band spectral range for special applications. Wavelength matched to
Metis M313 Narrow-Band High-End 1-Color Radiation Pyrometer Pyrometer for non-contact temperature measurement in short-wave and narrow-band spectral range for special applications. Wavelength matched to
SPIcam: an overview. Alan Diercks Institute for Systems Biology 23rd July 2002
 SPIcam: an overview Alan Diercks Institute for Systems Biology diercks@systemsbiology.org 23rd July 2002 1 Outline Overview of instrument CCDs mechanics instrument control performance construction anecdotes
SPIcam: an overview Alan Diercks Institute for Systems Biology diercks@systemsbiology.org 23rd July 2002 1 Outline Overview of instrument CCDs mechanics instrument control performance construction anecdotes
TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU
 TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU Alison K. Brown, Ph.D.* NAVSYS Corporation, 1496 Woodcarver Road, Colorado Springs, CO 891 USA, e-mail: abrown@navsys.com Abstract
TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU Alison K. Brown, Ph.D.* NAVSYS Corporation, 1496 Woodcarver Road, Colorado Springs, CO 891 USA, e-mail: abrown@navsys.com Abstract
Measurements Of Atmospheric Water Vapor using the Raman Lidar Technique: Summary and status within NDACC
 Measurements Of Atmospheric Water Vapor using the Raman Lidar Technique: Summary and status within NDACC Thierry Leblanc Jet Propulsion Laboratory, California Institute of Technology, Wrightwood, CA. USA
Measurements Of Atmospheric Water Vapor using the Raman Lidar Technique: Summary and status within NDACC Thierry Leblanc Jet Propulsion Laboratory, California Institute of Technology, Wrightwood, CA. USA
Calibration of a portable interferometer for fiber optic connector endface measurements
 Calibration of a portable interferometer for fiber optic connector endface measurements E. Lindmark Ph.D Light Source Reference Mirror Beamsplitter Camera Calibrated parameters Interferometer Interferometer
Calibration of a portable interferometer for fiber optic connector endface measurements E. Lindmark Ph.D Light Source Reference Mirror Beamsplitter Camera Calibrated parameters Interferometer Interferometer
Optimized Design of 3D Laser Triangulation Systems
 The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
TAKING LIDAR SUBSEA. Adam Lowry, Nov 2016
 TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
HARP-NEF Front End Assembly
 Science Fibers HARP-NEF Front End Assembly Calib Fibers HARPN Front End Assembly ( w/ Partial Cover Plates ) HARPN Front End Assembly 1 HARP-NEF Front End Assembly Roger Eng December 6, 2007 2 HARP-NEF
Science Fibers HARP-NEF Front End Assembly Calib Fibers HARPN Front End Assembly ( w/ Partial Cover Plates ) HARPN Front End Assembly 1 HARP-NEF Front End Assembly Roger Eng December 6, 2007 2 HARP-NEF
Complete Barrel Measuring and Inspection System. PS Series. User s manual
 Complete Barrel Measuring and Inspection System PS Series User s manual SAFETY PRECAUTIONS... 3 ELECTROMAGNETIC COMPATIBILITY... 3 LASER SAFETY... 3 GENERAL INFORMATION... 3 BASIC DATA AND PERFORMANCE
Complete Barrel Measuring and Inspection System PS Series User s manual SAFETY PRECAUTIONS... 3 ELECTROMAGNETIC COMPATIBILITY... 3 LASER SAFETY... 3 GENERAL INFORMATION... 3 BASIC DATA AND PERFORMANCE
WAVELENGTH MANAGEMENT
 BEAM DIAGNOS TICS SPECIAL PRODUCTS OEM DETECTORS THZ DETECTORS PHOTO DETECTORS HIGH POWER SOLUTIONS POWER DETECTORS ENERGY DETECTORS MONITORS Camera Accessories WAVELENGTH MANAGEMENT UV CONVERTERS UV Converters
BEAM DIAGNOS TICS SPECIAL PRODUCTS OEM DETECTORS THZ DETECTORS PHOTO DETECTORS HIGH POWER SOLUTIONS POWER DETECTORS ENERGY DETECTORS MONITORS Camera Accessories WAVELENGTH MANAGEMENT UV CONVERTERS UV Converters
Polarization of Light
 Polarization of Light Introduction Light, viewed classically, is a transverse electromagnetic wave. Namely, the underlying oscillation (in this case oscillating electric and magnetic fields) is along directions
Polarization of Light Introduction Light, viewed classically, is a transverse electromagnetic wave. Namely, the underlying oscillation (in this case oscillating electric and magnetic fields) is along directions
Ray Optics. Lecture 23. Chapter 34. Physics II. Course website:
 Lecture 23 Chapter 34 Physics II Ray Optics Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsii Today we are going to discuss: Chapter 34: Section 34.1-3 Ray Optics Ray Optics Wave
Lecture 23 Chapter 34 Physics II Ray Optics Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsii Today we are going to discuss: Chapter 34: Section 34.1-3 Ray Optics Ray Optics Wave
Lecture 14. Lidar Data Inversion and Sensitivity Analysis
 Lecture 14. Lidar Data Inversion and Sensitivity Analysis Data inversion process Nonlinearity of PMT and discriminator More considerations for Na Doppler lidar Definition of sensitivity Summary Office
Lecture 14. Lidar Data Inversion and Sensitivity Analysis Data inversion process Nonlinearity of PMT and discriminator More considerations for Na Doppler lidar Definition of sensitivity Summary Office
Modeling of Collection Efficiency in Lidar Spectroscopy
 Modeling of Collection Efficiency in Lidar Spectroscopy Barry Lienert and Shiv. K. Sharma Hawaii Inst. Geophysics & Planetology, 2525 Correa Rd, Honolulu HI 96822 Teng Chen, Frank Price and John M. J.
Modeling of Collection Efficiency in Lidar Spectroscopy Barry Lienert and Shiv. K. Sharma Hawaii Inst. Geophysics & Planetology, 2525 Correa Rd, Honolulu HI 96822 Teng Chen, Frank Price and John M. J.
Modeling the Interaction of a Laser Target Detection Device with the Sea
 Modeling the Interaction of a Laser Target Detection Device with the Sea Gary Buzzard, Thales Missile Electronics Proximity Fuze Product Technical Manager Content Low Level & Embedded Threats TDD Sensor
Modeling the Interaction of a Laser Target Detection Device with the Sea Gary Buzzard, Thales Missile Electronics Proximity Fuze Product Technical Manager Content Low Level & Embedded Threats TDD Sensor
Monte-Carlo modeling used to simulate propagation of photons in a medium
 Monte-Carlo modeling used to simulate propagation of photons in a medium Nils Haëntjens Ocean Optics Class 2017 based on lectures from Emmanuel Boss and Edouard Leymarie What is Monte Carlo Modeling? Monte
Monte-Carlo modeling used to simulate propagation of photons in a medium Nils Haëntjens Ocean Optics Class 2017 based on lectures from Emmanuel Boss and Edouard Leymarie What is Monte Carlo Modeling? Monte
Tomographic reconstruction for multiguidestar. Don Gavel, Jose Milovich LLNL
 Tomographic reconstruction for multiguidestar adaptive optics Don Gavel, Jose Milovich LLNL Tomographic Reconstruction Fundamental questions for the architecture of AO for etremely large telescopes Number
Tomographic reconstruction for multiguidestar adaptive optics Don Gavel, Jose Milovich LLNL Tomographic Reconstruction Fundamental questions for the architecture of AO for etremely large telescopes Number
MODEL LLT-1000 LIDAR LEVEL TRANSMITTER
 MODEL LLT-1000 LIDAR LEVEL TRANSMITTER Description Jogler s LIDAR Level Transmitter is a non-contact, laser based instrument that measures the level in silos, tanks, hoppers, chutes and bunkers. With long
MODEL LLT-1000 LIDAR LEVEL TRANSMITTER Description Jogler s LIDAR Level Transmitter is a non-contact, laser based instrument that measures the level in silos, tanks, hoppers, chutes and bunkers. With long
S-WAVEPLATE RADIAL/AZIMUTH POLARIZATION CONVERTER
 S-WAVEPLATE RADIAL/AZIMUTH POLARIZATION CONVERTER Operation manual Konstitucijos ave. 23 LT-08105 Vilnius, Lithuania Konstitucijos ave. 23C LT-08105 Vilnius, Lithuania tel. +370 5 272 57 38 fax +370 5
S-WAVEPLATE RADIAL/AZIMUTH POLARIZATION CONVERTER Operation manual Konstitucijos ave. 23 LT-08105 Vilnius, Lithuania Konstitucijos ave. 23C LT-08105 Vilnius, Lithuania tel. +370 5 272 57 38 fax +370 5
STANDARD SERIES MONOCHROMATOS FEATURES. Highly Customizable Modular Design. Two Configurable Input and Output Ports
 STANDARD SERIES MONOCHROMATOS FEATURES Highly Customizable Modular Design Two Configurable Input and Output Ports Configurable turret and Grating Options USB2.0 Communication A Full Line of Input and Output
STANDARD SERIES MONOCHROMATOS FEATURES Highly Customizable Modular Design Two Configurable Input and Output Ports Configurable turret and Grating Options USB2.0 Communication A Full Line of Input and Output
4. Recommended alignment procedure:
 4. Recommended alignment procedure: 4.1 Introduction The described below procedure presents an example of alignment of beam shapers Shaper and Focal- Shaper (F- Shaper) with using the standard Shaper Mount
4. Recommended alignment procedure: 4.1 Introduction The described below procedure presents an example of alignment of beam shapers Shaper and Focal- Shaper (F- Shaper) with using the standard Shaper Mount
COMPACT PRECISION LINEAR MOTORIZED ACTUATORS LSMA Series LSMA-173
 COMPACT PRECISION LINEAR MOTORIZED ACTUATORS LSMA Series Narrow Width ized Translation Stages Compact (30 mm) design Precision bearing system Resolution 0.1 microns Standard stroke 20 and 50 mm Optional
COMPACT PRECISION LINEAR MOTORIZED ACTUATORS LSMA Series Narrow Width ized Translation Stages Compact (30 mm) design Precision bearing system Resolution 0.1 microns Standard stroke 20 and 50 mm Optional
Claus Weitkamp Editor. Lidar. Range-Resolved Optical Remote Sensing of the Atmosphere. Foreword by Herbert Walther. With 162 Ulustrations.
 Claus Weitkamp Editor Lidar Range-Resolved Optical Remote Sensing of the Atmosphere Foreword by Herbert Walther With 162 Ulustrations 4Q Springer Contents Foreword Preface List of Contributors v vii xix
Claus Weitkamp Editor Lidar Range-Resolved Optical Remote Sensing of the Atmosphere Foreword by Herbert Walther With 162 Ulustrations 4Q Springer Contents Foreword Preface List of Contributors v vii xix
ML17 Series Tru-Vue TM Sensors
 ML7 Series Tru-Vue TM Sensors Diffuse Mode with Background Suppression See page 44 Features: Ver low color sensitivit Tamper-proof housing with no eternal adjustments Sensing Range: 5 mm Output: 4-in-
ML7 Series Tru-Vue TM Sensors Diffuse Mode with Background Suppression See page 44 Features: Ver low color sensitivit Tamper-proof housing with no eternal adjustments Sensing Range: 5 mm Output: 4-in-
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
AGLITE: A Multiwavelength Lidar for Aerosols
 AGLITE: A Multiwavelength Lidar for Aerosols T.D. Wilkerson 1, G.E. Bingham 1, V.V. Zavyalov 1, J. Swasey 1, J.J. Hancock 1, B.G. Crowther 1, S.S. Cornelsen 2, C. Marchant 1, J.N. Cutts 1, D.C. Huish 3,
AGLITE: A Multiwavelength Lidar for Aerosols T.D. Wilkerson 1, G.E. Bingham 1, V.V. Zavyalov 1, J. Swasey 1, J.J. Hancock 1, B.G. Crowther 1, S.S. Cornelsen 2, C. Marchant 1, J.N. Cutts 1, D.C. Huish 3,
Class 11 Introduction to Surface BRDF and Atmospheric Scattering. Class 12/13 - Measurements of Surface BRDF and Atmospheric Scattering
 University of Maryland Baltimore County - UMBC Phys650 - Special Topics in Experimental Atmospheric Physics (Spring 2009) J. V. Martins and M. H. Tabacniks http://userpages.umbc.edu/~martins/phys650/ Class
University of Maryland Baltimore County - UMBC Phys650 - Special Topics in Experimental Atmospheric Physics (Spring 2009) J. V. Martins and M. H. Tabacniks http://userpages.umbc.edu/~martins/phys650/ Class
THE USE OF TERRESTRIAL LASER SCANNING FOR MEASUREMENTS IN SHALLOW-WATER: CORRECTION OF THE 3D COORDINATES OF THE POINT CLOUD
 Photogrammetry and Remote Sensing Published as: Deruyter, G., Vanhaelst, M., Stal, C., Glas, H., De Wulf, A. (2015). The use of terrestrial laser scanning for measurements in shallow-water: correction
Photogrammetry and Remote Sensing Published as: Deruyter, G., Vanhaelst, M., Stal, C., Glas, H., De Wulf, A. (2015). The use of terrestrial laser scanning for measurements in shallow-water: correction
1. INTRODUCTION 2. OPAL LIDAR OVERVIEW
 Characterization of the OPAL LiDAR under controlled obscurant conditions Xiaoying Cao, Philip Church, Justin Matheson Neptec Technology Corporation, 302 Legget Drive, Kanata, Ontario, Canada K2K 1Y5 ABSTRACT
Characterization of the OPAL LiDAR under controlled obscurant conditions Xiaoying Cao, Philip Church, Justin Matheson Neptec Technology Corporation, 302 Legget Drive, Kanata, Ontario, Canada K2K 1Y5 ABSTRACT
Lecture 05. First Example: A Real Lidar
 Lecture 05. First Example: A Real Lidar Brief review of lidar basics K Doppler lidar system architecture K lidar signal estimate from lidar equation Comparison of estimate to reality Summary Review of
Lecture 05. First Example: A Real Lidar Brief review of lidar basics K Doppler lidar system architecture K lidar signal estimate from lidar equation Comparison of estimate to reality Summary Review of
ASM-IV ARGUS SURFACE METER
 ASM-IV ARGUS SURFACE METER The ASM IV instrument was primarily developed for high resolution measurements at the bottom of moving water (ocean/river locations). It records the reflections and the dynamic
ASM-IV ARGUS SURFACE METER The ASM IV instrument was primarily developed for high resolution measurements at the bottom of moving water (ocean/river locations). It records the reflections and the dynamic
Product Specifications
 Product Specifications The ksa RateRat Pro is a turnkey, real-time, in-situ optical reflectance probe designed for deposition monitoring of semi-absorbent thin films. The RateRat Pro measures deposition
Product Specifications The ksa RateRat Pro is a turnkey, real-time, in-situ optical reflectance probe designed for deposition monitoring of semi-absorbent thin films. The RateRat Pro measures deposition
Option G 1: Refraction
 Name: Date: Option G 1: Refraction 1. The table below relates to the electromagnetic spectrum. Complete the table by stating the name of the region of the spectrum and the name of a possible source of
Name: Date: Option G 1: Refraction 1. The table below relates to the electromagnetic spectrum. Complete the table by stating the name of the region of the spectrum and the name of a possible source of
Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications
 Update / News in the context of Remote Sensing applications") Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
ScanMaster. Aluminum Plate Inspection Using Phased Array Technology
 Aluminum Plate Inspection Using Phased Array Technology PA Basics Applied: Electronic Scanning Spatial scanning by driving an active active aperture in a predefined sequence Faster inspection as there
Aluminum Plate Inspection Using Phased Array Technology PA Basics Applied: Electronic Scanning Spatial scanning by driving an active active aperture in a predefined sequence Faster inspection as there
Quantifying the Dynamic Ocean Surface Using Underwater Radiometric Measurement
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Quantifying the Dynamic Ocean Surface Using Underwater Radiometric Measurement Lian Shen Department of Mechanical Engineering
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Quantifying the Dynamic Ocean Surface Using Underwater Radiometric Measurement Lian Shen Department of Mechanical Engineering
9. Polarizers. Index of. Coefficient of Material Wavelength ( ) Brewster angle refraction (n)
 Brewster angle refraction (n)") 9. Polarizers All polarized light is to some degree elliptical in nature. Basic states of polarization like linear and circular are actually special cases of elliptically polarized light which is defined
9. Polarizers All polarized light is to some degree elliptical in nature. Basic states of polarization like linear and circular are actually special cases of elliptically polarized light which is defined
Physics 4C Chabot College Scott Hildreth
 Physics 4C Chabot College Scott Hildreth Snell s Law with Microwave Optics Experiment Goals: Experimentally verify Snell s Law holds for microwaves. Lab Safety Note! Although the microwaves in this experiment
Physics 4C Chabot College Scott Hildreth Snell s Law with Microwave Optics Experiment Goals: Experimentally verify Snell s Law holds for microwaves. Lab Safety Note! Although the microwaves in this experiment
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
: Imaging Systems Laboratory II. Laboratory 2: Snell s Law, Dispersion and the Prism March 19 & 21, n 1 n 2
 05-3: Imaging Systems Laboratory II Laboratory : Snell s Law, Dispersion and the Prism March 9 &, 00 Abstract. This laboratory exercise will demonstrate two basic properties of the way light interacts
05-3: Imaging Systems Laboratory II Laboratory : Snell s Law, Dispersion and the Prism March 9 &, 00 Abstract. This laboratory exercise will demonstrate two basic properties of the way light interacts
The University of Wisconsin Arctic High-Spectral Resolution Lidar: General Information and Data Examples
 The University of Wisconsin Arctic High-Spectral Resolution Lidar: General Information and Data Examples Gijs de Boer, Edwin Eloranta The University of Wisconsin Madison, Madison, WI USA 1. Introduction
The University of Wisconsin Arctic High-Spectral Resolution Lidar: General Information and Data Examples Gijs de Boer, Edwin Eloranta The University of Wisconsin Madison, Madison, WI USA 1. Introduction
Mirror positioning on your fingertip. Embedded controller means tiny size plus fast, easy integration. Low power for hand-held systems
 SMALL, PRECISE, SMART IN MOTION DK-M3-RS-U-1M-20 Developer s Kit Single-Axis Mirror Positioning System Miniature piezo smart stage with built-in controller for simple, precise point-to-point positioning
SMALL, PRECISE, SMART IN MOTION DK-M3-RS-U-1M-20 Developer s Kit Single-Axis Mirror Positioning System Miniature piezo smart stage with built-in controller for simple, precise point-to-point positioning
13. Brewster angle measurement
 13. Brewster angle measurement Brewster angle measurement Objective: 1. Verification of Malus law 2. Measurement of reflection coefficient of a glass plate for p- and s- polarizations 3. Determination
13. Brewster angle measurement Brewster angle measurement Objective: 1. Verification of Malus law 2. Measurement of reflection coefficient of a glass plate for p- and s- polarizations 3. Determination
3D LASER SCANNING SYSTEMS. RobotEye RE08 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3D LASER SCANNING SYSTEMS RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet RobotEye RE08 3D LIDAR - 3D Laser Scanning System Ocular Robotics RobotEye RE08 3D LIDAR - 3D Laser Scanning
3D LASER SCANNING SYSTEMS RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet RobotEye RE08 3D LIDAR - 3D Laser Scanning System Ocular Robotics RobotEye RE08 3D LIDAR - 3D Laser Scanning
DEVELOPMENT OF CAMERA MODEL AND GEOMETRIC CALIBRATION/VALIDATION OF XSAT IRIS IMAGERY
 DEVELOPMENT OF CAMERA MODEL AND GEOMETRIC CALIBRATION/VALIDATION OF XSAT IRIS IMAGERY Leong Keong Kwoh, Xiaojing Huang, Wee Juan Tan Centre for Remote, Imaging Sensing and Processing (CRISP), National
DEVELOPMENT OF CAMERA MODEL AND GEOMETRIC CALIBRATION/VALIDATION OF XSAT IRIS IMAGERY Leong Keong Kwoh, Xiaojing Huang, Wee Juan Tan Centre for Remote, Imaging Sensing and Processing (CRISP), National
Industrial 2D LASER SCANNER LMS-Q120ii
 LMS-Q120ii Preliminary Datasheet Industrial 2D LASER SCANNER LMS-Q120ii The RIEGL LMS-Q120ii 2D - laser scanner provides accurate noncontact line scanning using a narrow infrared laser beam. The instrument
LMS-Q120ii Preliminary Datasheet Industrial 2D LASER SCANNER LMS-Q120ii The RIEGL LMS-Q120ii 2D - laser scanner provides accurate noncontact line scanning using a narrow infrared laser beam. The instrument
New capabilities of diffuser calibration lab at GSFC NASA to support remote sensing instrumentation
 New capabilities of diffuser calibration lab at GSFC NASA to support remote sensing instrumentation Jinan Zeng1, Jim Butler2, and Jack Xiong2 1Fibertek Incorporation, 13605 Dulles Technology Dr., Herndon,
New capabilities of diffuser calibration lab at GSFC NASA to support remote sensing instrumentation Jinan Zeng1, Jim Butler2, and Jack Xiong2 1Fibertek Incorporation, 13605 Dulles Technology Dr., Herndon,
2017 Summer Course on Optical Oceanography and Ocean Color Remote Sensing. Introduction to Remote Sensing
 2017 Summer Course on Optical Oceanography and Ocean Color Remote Sensing Introduction to Remote Sensing Curtis Mobley Delivered at the Darling Marine Center, University of Maine July 2017 Copyright 2017
2017 Summer Course on Optical Oceanography and Ocean Color Remote Sensing Introduction to Remote Sensing Curtis Mobley Delivered at the Darling Marine Center, University of Maine July 2017 Copyright 2017
Fresnel Reflection. angle of transmission. Snell s law relates these according to the
 Fresnel Reflection 1. Reflectivity of polarized light The reflection of a polarized beam of light from a dielectric material such as air/glass was described by Augustin Jean Fresnel in 1823. While his
Fresnel Reflection 1. Reflectivity of polarized light The reflection of a polarized beam of light from a dielectric material such as air/glass was described by Augustin Jean Fresnel in 1823. While his
Increased Underwater Optical Imaging Performance Via Multiple Autonomous Underwater Vehicles
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Increased Underwater Optical Imaging Performance Via Multiple Autonomous Underwater Vehicles Jules S. Jaffe Scripps Institution
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Increased Underwater Optical Imaging Performance Via Multiple Autonomous Underwater Vehicles Jules S. Jaffe Scripps Institution
Trimble GeoSpatial Products
 Expanding Solutions for Photogrammetric and Remote Sensing Professionals 55 th Photogrammetric Week in Stuttgart September 7 th 2015 Tobias Heuchel, Trimble Stuttgart, Germany Trimble GeoSpatial Products
Expanding Solutions for Photogrammetric and Remote Sensing Professionals 55 th Photogrammetric Week in Stuttgart September 7 th 2015 Tobias Heuchel, Trimble Stuttgart, Germany Trimble GeoSpatial Products
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
WAVELENGTH MANAGEMENT
 Camera Accessories WAVELENGTH MANAGEMENT UV CONVERTERS UV Converters take advantage of a phenomenon called fluorescence to extend the performance range of the Beamage beam profiling camera to ultraviolet
Camera Accessories WAVELENGTH MANAGEMENT UV CONVERTERS UV Converters take advantage of a phenomenon called fluorescence to extend the performance range of the Beamage beam profiling camera to ultraviolet
Use of the Polarized Radiance Distribution Camera System in the RADYO Program
 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Use of the Polarized Radiance Distribution Camera System in the RADYO Program Kenneth J. Voss Physics Department, University
DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Use of the Polarized Radiance Distribution Camera System in the RADYO Program Kenneth J. Voss Physics Department, University
Confocal Raman Systems SPECTROSCOPY GROUP
 Confocal Raman Systems SPECTROSCOPY GROUP MonoVista CRS Configuration Option PIXIS TE-Cooled CCD Camera Acton Spectrograph Micro-Raman Interface Witness Camera Optional Laser Micro/Macro Transfer Optics
Confocal Raman Systems SPECTROSCOPY GROUP MonoVista CRS Configuration Option PIXIS TE-Cooled CCD Camera Acton Spectrograph Micro-Raman Interface Witness Camera Optional Laser Micro/Macro Transfer Optics
Speed of light E Introduction
 Notice: All measurements and calculated values must be presented with SI units with an appropriate number of significant digits. Uncertainties required only when explicitly asked for. 1.0 Introduction
Notice: All measurements and calculated values must be presented with SI units with an appropriate number of significant digits. Uncertainties required only when explicitly asked for. 1.0 Introduction
SpatialFuser. Offers support for GNSS and INS navigation systems. Supports multiple remote sensing equipment configurations.
 SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
The Berek Polarization Compensator Model 5540
 USER S GUIDE The Berek Polarization Compensator Model 5540 U.S. Patent # 5,245,478 3635 Peterson Way Santa Clara, CA 95054 USA phone: (408) 980-5903 fax: (408) 987-3178 e-mail: techsupport@newfocus.com
USER S GUIDE The Berek Polarization Compensator Model 5540 U.S. Patent # 5,245,478 3635 Peterson Way Santa Clara, CA 95054 USA phone: (408) 980-5903 fax: (408) 987-3178 e-mail: techsupport@newfocus.com
Acuity. Acuity Sensors and Scanners. Product Brochure
 Acuity Acuity Sensors and Scanners Product Brochure CCS PRIMA The CCS Prima series of confocal displacement sensors are amongst the most precise measuring instruments in the world. Using a confocal chromatic
Acuity Acuity Sensors and Scanners Product Brochure CCS PRIMA The CCS Prima series of confocal displacement sensors are amongst the most precise measuring instruments in the world. Using a confocal chromatic
Chapters 1 7: Overview
 Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
Thermal Imaging Systems.
 www.aselsan.com.tr Thermal Imaging Systems ASELSAN offers superior capabilities to its customers with its Airborne and Naval Thermal Imaging Systems, commonly referred to as Forward Looking Infrared (FLIR).
www.aselsan.com.tr Thermal Imaging Systems ASELSAN offers superior capabilities to its customers with its Airborne and Naval Thermal Imaging Systems, commonly referred to as Forward Looking Infrared (FLIR).
1. INTRODUCTION 2. OBSCURANTS PENETRATION
 Characterization of the OPAL Obscurant Penetrating LiDAR in various Degraded Visual Environments Evan Trickey *, Philip Church **, Xiaoying Cao *** Neptec Design Group, 302 Legget Drive, Kanata, Ontario,
Characterization of the OPAL Obscurant Penetrating LiDAR in various Degraded Visual Environments Evan Trickey *, Philip Church **, Xiaoying Cao *** Neptec Design Group, 302 Legget Drive, Kanata, Ontario,
SF30 SF30. The SF30 is a high speed, light weight laser rangefinder for mapping and obstacle detection by robotic vehicles such as UAVs.
 The is a high speed, light weight laser rangefinder for mapping and obstacle detection by robotic vehicles such as UAVs. The can take up to 36633 readings per second and can be incorporated into scanning
The is a high speed, light weight laser rangefinder for mapping and obstacle detection by robotic vehicles such as UAVs. The can take up to 36633 readings per second and can be incorporated into scanning
Terrasolid European Training Event
 Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
2012 Imaging Science Ph.D. Comprehensive Examination June 15, :00AM to 1:00PM IMPORTANT INSTRUCTIONS
 2012 Imaging Science Ph.D. Comprehensive Examination June 15, 2012 9:00AM to 1:00PM IMPORTANT INSTRUCTIONS You must complete two (2) of the three (3) questions given for each of the core graduate classes.
2012 Imaging Science Ph.D. Comprehensive Examination June 15, 2012 9:00AM to 1:00PM IMPORTANT INSTRUCTIONS You must complete two (2) of the three (3) questions given for each of the core graduate classes.
Satellite Tracking System using Amateur Telescope and Star Camera for Portable Optical Ground Station
 Satellite Tracking System using Amateur Telescope and Star Camera for Portable Optical Ground Station Hyosang Yoon, Kathleen Riesing, and Kerri Cahoy MIT STAR Lab 30 th SmallSat Conference 8/10/2016 Hyosang
Satellite Tracking System using Amateur Telescope and Star Camera for Portable Optical Ground Station Hyosang Yoon, Kathleen Riesing, and Kerri Cahoy MIT STAR Lab 30 th SmallSat Conference 8/10/2016 Hyosang
AMG Series. Motorized Position and Rate Gimbals. Continuous 360 rotation of azimuth and elevation including built-in slip ring
 AMG Series Optical Mounts AMG Series Motorized Position and Rate Gimbals Continuous rotation of azimuth and elevation including built-in slip ring High accuracy angular position and rate capability Direct-drive
AMG Series Optical Mounts AMG Series Motorized Position and Rate Gimbals Continuous rotation of azimuth and elevation including built-in slip ring High accuracy angular position and rate capability Direct-drive
Precise Eye High Mag Fixed Lenses
 Precise Eye High Mag Fixed Lenses High resolution, diffraction-limited f/4.5 optical quality for high precision measurement and inspection. Long working distance makes illumination and handling easier.
Precise Eye High Mag Fixed Lenses High resolution, diffraction-limited f/4.5 optical quality for high precision measurement and inspection. Long working distance makes illumination and handling easier.