Hand Segmentation Using 2D/3D Images
|
|
|
- Preston Lee
- 5 years ago
- Views:
Transcription
1 S. E. Ghobadi, O. E. Loepprich, K. Hartmann, O. Loffeld, Hand Segmentation using D/3D Images, Proceedings of Image and Vision Computing New Zealand 007, pp. 6 69, Hamilton, New Zealand, December 007. Hand Segmentation Using D/3D Images S. E. Ghobadi 1, O. E. Loepprich 1, K. Hartmann 1, and O. Loffeld 1 1 Center for Sensor Systems (ZESS), University of Siegen, Paul-Bonatz-Str. 9-11, Siegen, Germany. {Ghobadi,Loepprich,Hartmann,Loffeld@zess.uni-siegen.de} Abstract This paper describes a fast and robust segmentation technique based on the fusion of D/3D images for gesture recognition. These images are provided by the novel 3D Time-of-Flight (TOF) camera which has been implemented in our research center (ZESS). Using modulated infrared lighting, this camera generates an intensity image with the range information for each pixel of a Photonic Mixer Device (PMD) sensor. The intensity and range data are fused to be used as the input information for the segmentation algorithm. Our proposed segmentation technique is based on the combination of two unsupervised clustering approaches: K-Means and Expectation Maximization (EM). They both attempt to find the centers of natural clusters in the fused data. The experimental results show that the proposed gesture segmentation technique can successfully segment the hand from user s body, face, arm or other objects in the scene under variant illumination conditions in real time. Keywords: Segmentation, D/3D Images, Gesture, K-Means, Expectation Maximization 1 Introduction A fast and robust segmentation is the first challenge in the vision-based gesture recognition for the real time man machine interaction. Gesture segmentation approaches based on intensity information or color images (D images) suffer from low efficiency and lack of robustness in the cluttered background as well as under variant lighting conditions. For this reason, in D gesture segmentation, the problem is usually simplified by introducing some assumptions or applying some constraints either to the scene or to the user. These limitations include wearing special gloves by the user [1], [], [3], controlling the illumination in the scene, avoiding to have the objects with the skin color in the image and using markers []. To overcome these difficulties and improve the robustness of the segmentation a lot of research has been done based on the range images in recent years [1], [], [5], [6], [7]. The range information can be provided by using different kinds of cameras such as laser range camera [], stereo camera [5], Coded Light Approach (CLA) camera [1] and Time of Flight (TOF) camera [6], [7], [8]. No matter, which kind of the camera system is used, the performance of the gesture segmentation for the real time application relies on how fast and how robust it is. These requirements depend on the frame rate of the camera and the quality of the range images taken by the camera. Although the CLA and laser range camera provide highly accurate range images, they suffer from the low acquisition rate. In [1] Caplier et al. used a CLA camera with the frame rate of 1 Hz and Heisele and Ritter used a laser range camera with the frame rate of 7Hz []. The stereo vision camera has also a low frame rate due to it s computational time to calculate the disparity map from right and left images. In [5] Nefian et al. used a stereo camera with the frame rate of 11 Hz. Another open issue in using stereo vision camera is that the stereo range images are heavily affected by texture and environmental illumination conditions. We have already discussed this problem in [8]. The 3D Time of Flight (TOF) sensors, on the other hand are becoming very attractive in man machine interaction field [6], [7], [8] because they can provide the gray level images with reliable range data for each pixel. While the range images of TOF camera are independent of the texture and lighting conditions, they are somehow affected by the color of the object. This is because the range image in TOF camera is calculated from the phase difference between the transmitted modulated infrared light to the object and the received infrared light back from the object. As the colors have different reflection factors, the range image in TOF camera is affected by the color of the object, ie. two objects with different colors at the same distance might get different range data in a TOF image. 6


2 This paper on one hand addresses the solution to this problem in a robust gesture segmentation by fusing the intensity and range information into a D feature space, and on the other hand proposes a fast segmentation technique using our novel 3D TOF camera. We have used the combination of two following unsupervised clustering techniques for segmentation: K-Means Clustering Expectation Maximization The paper continues as follows: Section presents an overview of our camera system which we have used. In Section 3 the data fusion is discussed. Section introduces the clustering techniques which have been used for the segmentation in this paper. Section 5 summarizes our experimental results while Section 6 concludes this work. 3D-Time of Flight Camera Range imaging in a 3D-Time of Flight camera is the fusion of the distance measurement technique with the imaging aspect. The principle of the range measurement in a TOF camera is based on the measurement of the time the light needs to travel from one point to another. This time which is socalled time-of-flight t is directly proportional to the distance d the light travels: d = c t where c denotes the speed of light. (1) Our 3D non-scanning Time of Flight (TOF) camera system consists of an infrared lighting source, Photonic Mixer Device (PMD) sensor [9], FPGA based processing and the communication unit. The lighting source illuminates the scene with the modulated infrared light signal which is generated using a MOSFET based driver and a bank of high speed infrared emitting diodes at the frequency of 0 MHz. The illuminated scene is observed by an intelligent pixel array (PMD) via an optical lens for focusing, where each pixel on the PMD sensor samples the amount of modulated light and determines the turnaround time of the modulated light [8]. Typically this is done by using continuous modulation and measuring of the phase delays in each pixel [10]. Assuming continuous sinusoidal or rectangular modulation, the distance is calculated as follows [10]: d = c ϕ π f mod () Figure 1: An Example of TOF Image (Left: Range Image, Right: Intensity Image) where f mod denotes the modulation frequency and ϕ = π f mod t represents the phase delay. At the modulation frequency of 0 MHZ, the unambiguous distance is equal to 15 meters, ie. the maximum distance for the target is 7.5 meters, because the illumination has to cover the distance twice: from the sender to the target and back to the sensor chip. To calculate the phase delay, the autocorrelation function of electrical and optical signal is analyzed by a phase-shift algorithm. Using four samples A 1, A, A 3 and A, each shifted by 90 degrees, the phase delay ϕ can be calculated using the following equation [8]: ϕ = arctan( A 1 A 3 A A ) (3) In addition to the phase shift of the signal, the strength of the received signal a and the gray scale value b are formulated respectively as follows [8]: (A1 A 3 ) a = + (A A ) () b = A 1 + A + A 3 + A (5) TOF camera, unlike the stereo vision camera, is texture independent and since the range is calculated directly in each pixel unit with minimal processing, a very high frame rate, dependent on the exposure time, can be obtained. In our work, we have used a PMD sensor with the resolution of 3K (6x8). The exposure time is set at 5 msec at the frequency of 0 MHz. Under these conditions and using a USB.0 communication protocol, the frame rate of 50 images per second is obtained which is suitable for real time applications. The range accuracy of this camera under the mentioned condition is about ±1 cm. An example of a TOF image, including the intensity and range images, is shown in Figure 1. The range image is coded in color such that the pixels in the foreground which represents the object closer to the camera are brighter. These two images are fused to provide the input data for the segmentation algorithm. 65
3 3 Range and Intensity Image Fusion The TOF camera delivers three data items for each pixel at each time step: intensity, range and amplitude of the received modulated light. The intensity image of the TOF camera comparable to the intensity images in CCD or CMOS cameras relies on the environment lighting conditions, whereas the range image and the amplitude of the received modulated light are mutually dependent. They both depend on the reflection factor of the object, ie. the constitution of the object. None of these individual data can be used solely to make a robust segmentation under variant lighting and color conditions. Fusing these data provides a new feature information which is used to improve the performance of the segmentation technique. In this paper we have used the basic technique for the fusing of the range and intensity data which has already been used in other fields like SAR imaging. The range data in a TOF image is dependent on the reflection factor of the object surface (how much light is reflected back from the object). Therefore, there is a correlation between the intensity and range vector sets in a TOF image. These two vector sets are fused to derive a new data set, so-called phase, which indicates the angle between two intensity and range vector sets and is derived as follows: First, using the intensity and range data in each image a new resulting set of complex number C is derived. C rc = g rc + i d rc (6) where g rc corresponds to the normalized gray value and d rc represents the normalized range information for each pixel in row r and column c of the intensity and range images respectively. Next, the phase of each complex number ϕ is calculated in the polar coordinate system for the whole array of the pixels: ϕ rc = arctan( d rc g rc ) (7) The phase of the complex value and range data are then combined into a D feature space where each pixel is described by a feature vector f rc, containing range and phase information. f rc = (d rc, ϕ rc ) (8) Here, range denotes the position of the object in Z direction in the world coordinate system which is aligned to the optical axis. The other D information in XY coordinate system are neglected, because in our gesture segmentation problem the pixels with the similar XY information do not necessarily belong to the the same physical object. Segmentation Segmentation is the first step of the image processing in the computer vision applications such as gesture recognition. It is the process of distinguishing the object of interest from the background as well as the surrounding non interesting objects. In other words, image segmentation aims at a better recognition of objects by grouping of the image pixels or finding the boundaries between the objects in the image. Gesture segmentation in this paper is treated as a clustering problem. Clustering is an unsupervised learning technique to identify the group of unlabeled data based on some similarity measures. Each group of unlabeled data so-called cluster corresponds to an image region while each data point is a feature vector which represents a pixel of the image. Two techniques have been combined and employed for clustering in this paper which are discussed in the next sections..1 K-Means technique K-means is one of the simplest unsupervised learning algorithms that solve the well known clustering problem by partitioning the data set {x 1, x,..., x N } into some number K of clusters. For each data point x n, a binary membership function is defined as: r nk = { 1 if xn assigned to cluster k 0 otherwise K-means aims at minimizing the objective function, given by [1]: J = n=1 k=1 K r nk x n µ k (9) where x n µ k is the distance between the data point x n and the cluster center µ k. In fact, the goal is to find the values for the {r nk } and the {µ k } so as to minimize J. This is done through an iterative procedure in which each iteration involves two successive steps corresponding to successive optimization with respect to the r nk and the µ k [1]. The main advantages of this algorithm are its simplicity and speed. The computational cost of K- means is O(KN), which allows it to run on the large data sets. However, k-means is a data dependent algorithm. Although it can be proved that the procedure will always terminate, the algorithm does not achieve a global minimum. Since K-means is a distance based or hard membership algorithm, every data point, at each iteration, 66
4 is assigned uniquely to one, and only one, of the clusters. For the data points which lie roughly midway between cluster centers, the hard assignment to the nearest cluster might not be the most appropriate one. By adopting the probabilistic approaches, like Expectation Maximization (EM), a soft assignments of data points can be obtained.. Expectation Maximization Technique Expectation Maximization (EM) is a powerful method to find the maximum likelihood solution for models with latent variables. This approach can be used for image segmentation where each segment (cluster) is mathematically represented by a parametric Gaussian Distribution. The entire data set is therefore modeled by a mixture of these distributions. EM consists of the iterations of two steps: E-step and M-step. After the initialization, these two steps are repeated till the algorithm converges and gives a maximum likelihood estimation. The implementation of EM has been done as follows [1]: Initialization: the parameters we want to learn are initialized. These consist of mean µ k, covariance Σ k and mixing coefficients π k. Expectation: In the expectation step the expected values E(z nk ) for each data point x n is calculated. It is actually the probability that x n is generated by the kth distribution. E(z nk ) = π k N (x n µ k, Σ k ) K j=1 π jn (x n µ j, Σ j ) (10) Maximization: Once the expected values E(z nk ) have been calculated, the parameters are reestimated: Σ new k = 1 N k where µ new k = 1 N k n=1 E(z nk )x n (11) n=1 E(z nk )(x n µ new k π new k N k = = N k N )(x n µ new k ) T (1) (13) E(z nk ) (1) n=1 Evaluation: In this step the log likelihood is evaluated and the convergence of the parameters or the log likelihood is checked. If the convergence criterion is not satisfied the algorithm returns to the Expectation Step K-Means Expectation Maximization (KEM) Technique As it is already mentioned the K-means algorithm has a hard membership function and a small shift of a data point can flip it to a different cluster. The solution to this problem is to replace hard clustering of k-means with soft probabilistic assignments [1]. In our paper this is done by EM algorithm because EM has no strict boundary among clusters and a data point is assigned to each cluster with a certain probability. However, the techniques such as EM might yield poor clusters if the parameters are not initialized properly. To solve this problem we have proposed a technique which combines K-Means with EM, so-called KEM. This technique is similar to that presented in [13]. It employs K-means as the the initial clustering to find the initial cluster centers. This reduces the sensitivity of the initial points and gives the centers which are widely spread within the data. These centers are used as the initial parameters for EM and it starts iterating to find the local maxima. 5 Experiments and Results All experiments have been done in the real time. The range and intensity images are taken directly in each snap shot of a TOF camera based on PMD sensor. The resolution of the camera we have used is 3k (6x8 pixels). The modulation frequency and the exposure time have been set to 0 MHz and 5 msec respectively. Under these conditions, the frame rate of the camera is about 50 images per second, including the intensity and range images. Using K-Means Expectation Maximization (KEM) which was discussed in the last section, each image is segmented. The frame rate of the segmented images is above video frame rate which is suitable for the real time gesture tracking and recognition. We evaluate our segmentation technique for three following cases: gesture is posed in the foreground of a simple scene. Figure depicts some images of this case. In these images the gesture is posed in the distance of over 10 cm from the background, torso or face. The first row in Figure shows the intensity images. The second row shows the coded range images such that the pixels of the background are darker than the pixels of the gesture in the foreground. The third row shows the results of segmentation using KEM technique for six clusters. The images 1 to 3 show the gesture in a plain background while the images to 8 show the gesture in the scene where



")




























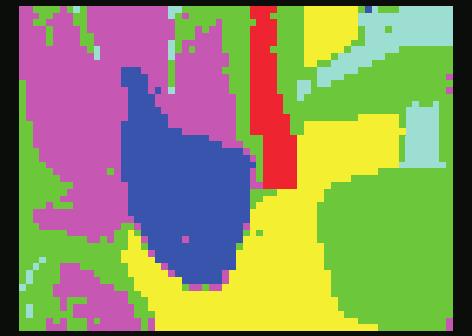

























5 Figure : Results of gesture segmentation in a sequence of movement from foreground to the background. First row: intensity images, Second row: range images, Third row: segmented images) Some images of this case are shown in Figure 3. In this case the gesture is posed in a cluttered and complex scene where the lighting condition as well as the color of the objects affect the TOF images and make the problem more complicated. In this case, we have segmented the images once using just the range data as the single feature and once using the fusion of the range and phase data. The first and the second row of the Figure 3 show the intensity and the range images respectively. The third row shows the results of the segmentation using the range data while the last row shows the segmented images using the fused data. As it can be seen from the results, the segmented images using just range information get too much error and the pixels related to the gesture do not get isolated from the pixels of the other objects very well. In the images 1 and the range data are affected by the color, ie. the black color ( the color of the shirt in image 1 and the color of the hair in image ) does not reflect too much infrared light and therefore the range data get wrong values for these objects. This is one of the problem of TOF camera which we have already discussed in this paper. In the range images and 6 since the face is not illuminated very well by the lighting system, we get some errors in the range data. Also, the range data in images 3 and 5 get error because the gesture span to the torso, face, arm or other objects in these images is smaller than the statistical error rate of TOF image (about cm). However, these images show that the TOF range images can not be used solely to build a robust gesture segmentation under these conditions. Fusing the range data with the intensity images which has been proposed in our paper solves this problem. As the results of the segmentation based on fused data in the last row of Figure 3 show, the pixels related to the gesture have been grouped in one cluster and the gesture has been segmented very well from the face, torso or other objects in the complex scene. Figure : Results of gesture segmentation in a simple scene. First row: intensity images, Second row: range images,third row: segmented images) Figure 3: Results of gesture segmentation in a complex scene. First row: intensity images, Second row: range images, Third row: segmented images using range feature, Fourth row: segmented images using the fusion of range and phase features) the user s body, face or arm are observed as well. As it is seen from the segmented images, the pixels related to the gesture have been grouped in one cluster very well without any error. In this case, since the gesture span from the background, torso or face (10 cm) is over the statistical noise of TOF range images (about cm), the range information, without fusing with the intensity data, can be used as a single feature for the segmentation algorithm and it yields the same results as when the fusion of range and phase is employed as the input feature vector for the segmentation. A sequence of moving gesture from foreground to the background. gesture is posed in the foreground in a cluttered and complex scene. 68
6 Figure shows a sequence of moving gesture from foreground to the background in the steps of 15 cm. As the previous figures, the first and second row show the intensity and range images respectively while the third row shows the segmented images. The hand gesture is segmented from the user s body, face and arm very well in all of the sequences except image sequence number where the hand gesture and face are posed in the same distance from the camera and they both have the same intensity values. This is actually the case that the segmentation fails. This problem can be solved using our new novel D/3D multi-camera [1] which employs two sensors to provide a colorful high resolution image with the range information. In our ongoing project these images are used for gesture recognition. 6 Conclusion This paper describes a fast and robust gesture segmentation technique based on the fusion of range and intensity images of a TOF camera. This camera provides these images with the frame rate of 50 images per second which is suitable for the real time gesture tracking and recognition applications. The two unsupervised clustering techniques, K- means and Expectation Maximization, are combined to segment the images. The results show that the proposed technique is on one hand fast to deliver the segmented images at the video frame rate and on the other hand is robust enough to be used as the first step of processing technique in D/3D gesture tracking and gesture recognition. We have also shown that in the case where the gesture gets the same range and intensity information as the face, the segmentation fails. The solution to this problem is to use our new novel D/3D camera which delivers a colorful high resolution image with the range information. 7 Acknowledgments This research has been supported by the DFG Dynamisches 3D Sehen- Multicam Project and DAAD IPP s Program in Center for Sensor System (ZESS) in Germany. References [1] A. Caplier, L. Bonnaud, S. Malassiotis, and M. G. Strintzis, Comparison of d and 3d analysis for automated cued speech gesture recognition, in 9-th International Conference on Speech and Computer, SPECOM0, 00. [] C. Keskin, O. Aran, and L. Akarun, Real time gestural interface for generic applications, in European Signal Processing Conference, EUSIPCO 05, 005. [3] T. Burger, A. Caplier, and S. Mancini, Cued speech hand gestures recognition tool, in European Signal Processing Conference, EU- SIPCO 05, 005. [] B. Heisele and W. Ritter, Segmentation of range and intensity image sequences by clustering, in IEEE International Conference on Information Intelligence and Systems, [5] A. V. Nefian, R. Grzeszczuk, and V. Eruhimov, A statistical upper body model for 3d static and dynamic gesture recognition from stereo sequences, in IEEE International Conference on Image Processing, 001. [6] B. S. Goektuerk and C. Tomasi, 3d head tracking based on recognition and interpolation using a time-of-flight depth sensor, in IEEE Conference on Computer Vision and Pattern Recognition, 00. [7] Z. Mo and U. Neumann, Real-time hand pose recognition using low-resolution depth images, in IEEE Conference on Computer Vision and Pattern Recognition, 006. [8] S. Ghobadi, K. Hartmann, W. Weihs, C. Netramai, O. Loffeld, and H. Roth, Detection and classification of moving objects-stereo or time-of-flight images, in Computational Intelligence and Security. IEEE, 006, pp [9] PMD, Photoics pmd 3k-s 3d video sensor array with active sbi, [10] T. Moeller, H. Kraft, and F. J., Robust 3d measurement with pmd sensors, in PMD Technologies GmbH, [11] S. Gokturk, H. Yalcin, and C. Bamji, A time of flight depth sensor, system description, issues and solutions, in IEEE workshop on Real-Time 3D Sensors, 00. [1] C. M. Bishop, Pattern Recognition and Machine Learning. Springer, 006. [13] S. Nasser, R. Alkhaldi, and G. Vert, A modified fuzzy k-means clustering using expectation maximization, in IEEE World Congress on Computational Intelligence, 006. [1] T. Prasad, K. Hartmann, W. Weihs, S. Ghobadi, and A. Sluiter, First steps in enhancing 3d vision technique using d/3d sensors, in Computer Vision Winter Workshop,
Real Time Hand Based Robot Control Using Multimodal Images
 Real Time Hand Based Robot Control Using Multimodal Images Seyed Eghbal Ghobadi Omar Edmond Loepprich Farid Ahmadov Jens Bernshausen Klaus Hartmann Otmar Loffeld Abstract In the interaction between man
Real Time Hand Based Robot Control Using Multimodal Images Seyed Eghbal Ghobadi Omar Edmond Loepprich Farid Ahmadov Jens Bernshausen Klaus Hartmann Otmar Loffeld Abstract In the interaction between man
A Framework for Multiple Radar and Multiple 2D/3D Camera Fusion
 A Framework for Multiple Radar and Multiple 2D/3D Camera Fusion Marek Schikora 1 and Benedikt Romba 2 1 FGAN-FKIE, Germany 2 Bonn University, Germany schikora@fgan.de, romba@uni-bonn.de Abstract: In this
A Framework for Multiple Radar and Multiple 2D/3D Camera Fusion Marek Schikora 1 and Benedikt Romba 2 1 FGAN-FKIE, Germany 2 Bonn University, Germany schikora@fgan.de, romba@uni-bonn.de Abstract: In this
Real-time Image Stabilization for ToF Cameras on Mobile Platforms
 Real-time Image Stabilization for ToF Cameras on Mobile Platforms Benjamin Langmann, Klaus Hartmann, and Otmar Loffeld Center for Sensor Systems (ZESS), University of Siegen, Paul-Bonatz-Str. 9-, 8 Siegen,
Real-time Image Stabilization for ToF Cameras on Mobile Platforms Benjamin Langmann, Klaus Hartmann, and Otmar Loffeld Center for Sensor Systems (ZESS), University of Siegen, Paul-Bonatz-Str. 9-, 8 Siegen,
Subpixel Corner Detection for Tracking Applications using CMOS Camera Technology
 Subpixel Corner Detection for Tracking Applications using CMOS Camera Technology Christoph Stock, Ulrich Mühlmann, Manmohan Krishna Chandraker, Axel Pinz Institute of Electrical Measurement and Measurement
Subpixel Corner Detection for Tracking Applications using CMOS Camera Technology Christoph Stock, Ulrich Mühlmann, Manmohan Krishna Chandraker, Axel Pinz Institute of Electrical Measurement and Measurement
3D Time-of-Flight Image Sensor Solutions for Mobile Devices
 3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
Clustering Lecture 5: Mixture Model
 Clustering Lecture 5: Mixture Model Jing Gao SUNY Buffalo 1 Outline Basics Motivation, definition, evaluation Methods Partitional Hierarchical Density-based Mixture model Spectral methods Advanced topics
Clustering Lecture 5: Mixture Model Jing Gao SUNY Buffalo 1 Outline Basics Motivation, definition, evaluation Methods Partitional Hierarchical Density-based Mixture model Spectral methods Advanced topics
Time-of-flight basics
 Contents 1. Introduction... 2 2. Glossary of Terms... 3 3. Recovering phase from cross-correlation... 4 4. Time-of-flight operating principle: the lock-in amplifier... 6 5. The time-of-flight sensor pixel...
Contents 1. Introduction... 2 2. Glossary of Terms... 3 3. Recovering phase from cross-correlation... 4 4. Time-of-flight operating principle: the lock-in amplifier... 6 5. The time-of-flight sensor pixel...
Lateral and Depth Calibration of PMD-Distance Sensors
 Lateral and Depth Calibration of PMD-Distance Sensors Marvin Lindner and Andreas Kolb Computer Graphics Group, University of Siegen, Germany Abstract. A growing number of modern applications such as position
Lateral and Depth Calibration of PMD-Distance Sensors Marvin Lindner and Andreas Kolb Computer Graphics Group, University of Siegen, Germany Abstract. A growing number of modern applications such as position
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Wide Area 2D/3D Imaging
 Wide Area 2D/3D Imaging Benjamin Langmann Wide Area 2D/3D Imaging Development, Analysis and Applications Benjamin Langmann Hannover, Germany Also PhD Thesis, University of Siegen, 2013 ISBN 978-3-658-06456-3
Wide Area 2D/3D Imaging Benjamin Langmann Wide Area 2D/3D Imaging Development, Analysis and Applications Benjamin Langmann Hannover, Germany Also PhD Thesis, University of Siegen, 2013 ISBN 978-3-658-06456-3
2 Depth Camera Assessment
 2 Depth Camera Assessment The driving question of this chapter is how competitive cheap consumer depth cameras, namely the Microsoft Kinect and the SoftKinetic DepthSense, are compared to state-of-the-art
2 Depth Camera Assessment The driving question of this chapter is how competitive cheap consumer depth cameras, namely the Microsoft Kinect and the SoftKinetic DepthSense, are compared to state-of-the-art
Note Set 4: Finite Mixture Models and the EM Algorithm
 Note Set 4: Finite Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine Finite Mixture Models A finite mixture model with K components, for
Note Set 4: Finite Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine Finite Mixture Models A finite mixture model with K components, for
Adaptive Skin Color Classifier for Face Outline Models
 Adaptive Skin Color Classifier for Face Outline Models M. Wimmer, B. Radig, M. Beetz Informatik IX, Technische Universität München, Germany Boltzmannstr. 3, 87548 Garching, Germany [wimmerm, radig, beetz]@informatik.tu-muenchen.de
Adaptive Skin Color Classifier for Face Outline Models M. Wimmer, B. Radig, M. Beetz Informatik IX, Technische Universität München, Germany Boltzmannstr. 3, 87548 Garching, Germany [wimmerm, radig, beetz]@informatik.tu-muenchen.de
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Mixture Models and EM
 Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Static Gesture Recognition with Restricted Boltzmann Machines
 Static Gesture Recognition with Restricted Boltzmann Machines Peter O Donovan Department of Computer Science, University of Toronto 6 Kings College Rd, M5S 3G4, Canada odonovan@dgp.toronto.edu Abstract
Static Gesture Recognition with Restricted Boltzmann Machines Peter O Donovan Department of Computer Science, University of Toronto 6 Kings College Rd, M5S 3G4, Canada odonovan@dgp.toronto.edu Abstract
9.1. K-means Clustering
 424 9. MIXTURE MODELS AND EM Section 9.2 Section 9.3 Section 9.4 view of mixture distributions in which the discrete latent variables can be interpreted as defining assignments of data points to specific
424 9. MIXTURE MODELS AND EM Section 9.2 Section 9.3 Section 9.4 view of mixture distributions in which the discrete latent variables can be interpreted as defining assignments of data points to specific
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Fuzzy Segmentation. Chapter Introduction. 4.2 Unsupervised Clustering.
 Chapter 4 Fuzzy Segmentation 4. Introduction. The segmentation of objects whose color-composition is not common represents a difficult task, due to the illumination and the appropriate threshold selection
Chapter 4 Fuzzy Segmentation 4. Introduction. The segmentation of objects whose color-composition is not common represents a difficult task, due to the illumination and the appropriate threshold selection
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Multiple Model Estimation : The EM Algorithm & Applications
 Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Dec. 4, 2008 Harpreet S. Sawhney hsawhney@sarnoff.com Plan IBR / Rendering applications of motion / pose
Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Dec. 4, 2008 Harpreet S. Sawhney hsawhney@sarnoff.com Plan IBR / Rendering applications of motion / pose
Active Light Time-of-Flight Imaging
 Active Light Time-of-Flight Imaging Time-of-Flight Pulse-based time-of-flight scanners [Gvili03] NOT triangulation based short infrared laser pulse is sent from camera reflection is recorded in a very
Active Light Time-of-Flight Imaging Time-of-Flight Pulse-based time-of-flight scanners [Gvili03] NOT triangulation based short infrared laser pulse is sent from camera reflection is recorded in a very
Probabilistic Facial Feature Extraction Using Joint Distribution of Location and Texture Information
 Probabilistic Facial Feature Extraction Using Joint Distribution of Location and Texture Information Mustafa Berkay Yilmaz, Hakan Erdogan, Mustafa Unel Sabanci University, Faculty of Engineering and Natural
Probabilistic Facial Feature Extraction Using Joint Distribution of Location and Texture Information Mustafa Berkay Yilmaz, Hakan Erdogan, Mustafa Unel Sabanci University, Faculty of Engineering and Natural
Usability study of 3D Time-of-Flight cameras for automatic plant phenotyping
 93 Usability study of 3D Time-of-Flight cameras for automatic plant phenotyping Ralph Klose, Jaime Penlington, Arno Ruckelshausen University of Applied Sciences Osnabrück/ Faculty of Engineering and Computer
93 Usability study of 3D Time-of-Flight cameras for automatic plant phenotyping Ralph Klose, Jaime Penlington, Arno Ruckelshausen University of Applied Sciences Osnabrück/ Faculty of Engineering and Computer
Nearest Clustering Algorithm for Satellite Image Classification in Remote Sensing Applications
 Nearest Clustering Algorithm for Satellite Image Classification in Remote Sensing Applications Anil K Goswami 1, Swati Sharma 2, Praveen Kumar 3 1 DRDO, New Delhi, India 2 PDM College of Engineering for
Nearest Clustering Algorithm for Satellite Image Classification in Remote Sensing Applications Anil K Goswami 1, Swati Sharma 2, Praveen Kumar 3 1 DRDO, New Delhi, India 2 PDM College of Engineering for
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Estimating the wavelength composition of scene illumination from image data is an
 Chapter 3 The Principle and Improvement for AWB in DSC 3.1 Introduction Estimating the wavelength composition of scene illumination from image data is an important topics in color engineering. Solutions
Chapter 3 The Principle and Improvement for AWB in DSC 3.1 Introduction Estimating the wavelength composition of scene illumination from image data is an important topics in color engineering. Solutions
Depth Camera for Mobile Devices
 Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.
![PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.](/thumbs/72/67823170.jpg "PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.") R PMD [vision] Day Vol. 3 Munich, November 18, 2010 Dr. Volker Frey ifm electronic gmbh PMD Cameras for Automotive & Outdoor Applications Stand: 27.10.2010 Seite 1 I Working Principle PMD distance measurement
R PMD [vision] Day Vol. 3 Munich, November 18, 2010 Dr. Volker Frey ifm electronic gmbh PMD Cameras for Automotive & Outdoor Applications Stand: 27.10.2010 Seite 1 I Working Principle PMD distance measurement
Modern Medical Image Analysis 8DC00 Exam
 Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Accurate Image Registration from Local Phase Information
 Accurate Image Registration from Local Phase Information Himanshu Arora, Anoop M. Namboodiri, and C.V. Jawahar Center for Visual Information Technology, IIIT, Hyderabad, India { himanshu@research., anoop@,
Accurate Image Registration from Local Phase Information Himanshu Arora, Anoop M. Namboodiri, and C.V. Jawahar Center for Visual Information Technology, IIIT, Hyderabad, India { himanshu@research., anoop@,
IBL and clustering. Relationship of IBL with CBR
 IBL and clustering Distance based methods IBL and knn Clustering Distance based and hierarchical Probability-based Expectation Maximization (EM) Relationship of IBL with CBR + uses previously processed
IBL and clustering Distance based methods IBL and knn Clustering Distance based and hierarchical Probability-based Expectation Maximization (EM) Relationship of IBL with CBR + uses previously processed
ROBUST OBJECT TRACKING BY SIMULTANEOUS GENERATION OF AN OBJECT MODEL
 ROBUST OBJECT TRACKING BY SIMULTANEOUS GENERATION OF AN OBJECT MODEL Maria Sagrebin, Daniel Caparròs Lorca, Daniel Stroh, Josef Pauli Fakultät für Ingenieurwissenschaften Abteilung für Informatik und Angewandte
ROBUST OBJECT TRACKING BY SIMULTANEOUS GENERATION OF AN OBJECT MODEL Maria Sagrebin, Daniel Caparròs Lorca, Daniel Stroh, Josef Pauli Fakultät für Ingenieurwissenschaften Abteilung für Informatik und Angewandte
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Short Survey on Static Hand Gesture Recognition
 Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Clustering: Classic Methods and Modern Views
 Clustering: Classic Methods and Modern Views Marina Meilă University of Washington mmp@stat.washington.edu June 22, 2015 Lorentz Center Workshop on Clusters, Games and Axioms Outline Paradigms for clustering
Clustering: Classic Methods and Modern Views Marina Meilă University of Washington mmp@stat.washington.edu June 22, 2015 Lorentz Center Workshop on Clusters, Games and Axioms Outline Paradigms for clustering
An indirect tire identification method based on a two-layered fuzzy scheme
 Journal of Intelligent & Fuzzy Systems 29 (2015) 2795 2800 DOI:10.3233/IFS-151984 IOS Press 2795 An indirect tire identification method based on a two-layered fuzzy scheme Dailin Zhang, Dengming Zhang,
Journal of Intelligent & Fuzzy Systems 29 (2015) 2795 2800 DOI:10.3233/IFS-151984 IOS Press 2795 An indirect tire identification method based on a two-layered fuzzy scheme Dailin Zhang, Dengming Zhang,
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Digital Image Processing. Prof. P.K. Biswas. Department of Electronics & Electrical Communication Engineering
 Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Multiple Model Estimation : The EM Algorithm & Applications
 Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Nov. 13, 2007 Harpreet S. Sawhney hsawhney@sarnoff.com Recapitulation Problem of motion estimation Parametric
Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Nov. 13, 2007 Harpreet S. Sawhney hsawhney@sarnoff.com Recapitulation Problem of motion estimation Parametric
Pedestrian counting in video sequences using optical flow clustering
 Pedestrian counting in video sequences using optical flow clustering SHIZUKA FUJISAWA, GO HASEGAWA, YOSHIAKI TANIGUCHI, HIROTAKA NAKANO Graduate School of Information Science and Technology Osaka University
Pedestrian counting in video sequences using optical flow clustering SHIZUKA FUJISAWA, GO HASEGAWA, YOSHIAKI TANIGUCHI, HIROTAKA NAKANO Graduate School of Information Science and Technology Osaka University
Introduction to Trajectory Clustering. By YONGLI ZHANG
 Introduction to Trajectory Clustering By YONGLI ZHANG Outline 1. Problem Definition 2. Clustering Methods for Trajectory data 3. Model-based Trajectory Clustering 4. Applications 5. Conclusions 1 Problem
Introduction to Trajectory Clustering By YONGLI ZHANG Outline 1. Problem Definition 2. Clustering Methods for Trajectory data 3. Model-based Trajectory Clustering 4. Applications 5. Conclusions 1 Problem
Problem definition Image acquisition Image segmentation Connected component analysis. Machine vision systems - 1
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections.
 Image Interpolation 48 Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections. Fundamentally, interpolation is the process of using known
Image Interpolation 48 Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections. Fundamentally, interpolation is the process of using known
Motion in 2D image sequences
 Motion in 2D image sequences Definitely used in human vision Object detection and tracking Navigation and obstacle avoidance Analysis of actions or activities Segmentation and understanding of video sequences
Motion in 2D image sequences Definitely used in human vision Object detection and tracking Navigation and obstacle avoidance Analysis of actions or activities Segmentation and understanding of video sequences
Evaluation of Moving Object Tracking Techniques for Video Surveillance Applications
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
CS Introduction to Data Mining Instructor: Abdullah Mueen
 CS 591.03 Introduction to Data Mining Instructor: Abdullah Mueen LECTURE 8: ADVANCED CLUSTERING (FUZZY AND CO -CLUSTERING) Review: Basic Cluster Analysis Methods (Chap. 10) Cluster Analysis: Basic Concepts
CS 591.03 Introduction to Data Mining Instructor: Abdullah Mueen LECTURE 8: ADVANCED CLUSTERING (FUZZY AND CO -CLUSTERING) Review: Basic Cluster Analysis Methods (Chap. 10) Cluster Analysis: Basic Concepts
Robert Collins CSE598G. Intro to Template Matching and the Lucas-Kanade Method
 Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Topics for thesis. Automatic Speech-based Emotion Recognition
 Topics for thesis Bachelor: Automatic Speech-based Emotion Recognition Emotion recognition is an important part of Human-Computer Interaction (HCI). It has various applications in industrial and commercial
Topics for thesis Bachelor: Automatic Speech-based Emotion Recognition Emotion recognition is an important part of Human-Computer Interaction (HCI). It has various applications in industrial and commercial
Introduction to Machine Learning CMU-10701
 Introduction to Machine Learning CMU-10701 Clustering and EM Barnabás Póczos & Aarti Singh Contents Clustering K-means Mixture of Gaussians Expectation Maximization Variational Methods 2 Clustering 3 K-
Introduction to Machine Learning CMU-10701 Clustering and EM Barnabás Póczos & Aarti Singh Contents Clustering K-means Mixture of Gaussians Expectation Maximization Variational Methods 2 Clustering 3 K-
Sensor technology for mobile robots
 Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
DTU M.SC. - COURSE EXAM Revised Edition
 Written test, 16 th of December 1999. Course name : 04250 - Digital Image Analysis Aids allowed : All usual aids Weighting : All questions are equally weighed. Name :...................................................
Written test, 16 th of December 1999. Course name : 04250 - Digital Image Analysis Aids allowed : All usual aids Weighting : All questions are equally weighed. Name :...................................................
Expectation Maximization (EM) and Gaussian Mixture Models
 and Gaussian Mixture Models") Expectation Maximization (EM) and Gaussian Mixture Models Reference: The Elements of Statistical Learning, by T. Hastie, R. Tibshirani, J. Friedman, Springer 1 2 3 4 5 6 7 8 Unsupervised Learning Motivation
Expectation Maximization (EM) and Gaussian Mixture Models Reference: The Elements of Statistical Learning, by T. Hastie, R. Tibshirani, J. Friedman, Springer 1 2 3 4 5 6 7 8 Unsupervised Learning Motivation
Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains
 Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains Ahmad Ali Abin, Mehran Fotouhi, Shohreh Kasaei, Senior Member, IEEE Sharif University of Technology, Tehran, Iran abin@ce.sharif.edu,
Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains Ahmad Ali Abin, Mehran Fotouhi, Shohreh Kasaei, Senior Member, IEEE Sharif University of Technology, Tehran, Iran abin@ce.sharif.edu,
Semi-Supervised Clustering with Partial Background Information
 Semi-Supervised Clustering with Partial Background Information Jing Gao Pang-Ning Tan Haibin Cheng Abstract Incorporating background knowledge into unsupervised clustering algorithms has been the subject
Semi-Supervised Clustering with Partial Background Information Jing Gao Pang-Ning Tan Haibin Cheng Abstract Incorporating background knowledge into unsupervised clustering algorithms has been the subject
Real-Time Human Detection using Relational Depth Similarity Features
 Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
Monocular Human Motion Capture with a Mixture of Regressors. Ankur Agarwal and Bill Triggs GRAVIR-INRIA-CNRS, Grenoble, France
 Monocular Human Motion Capture with a Mixture of Regressors Ankur Agarwal and Bill Triggs GRAVIR-INRIA-CNRS, Grenoble, France IEEE Workshop on Vision for Human-Computer Interaction, 21 June 2005 Visual
Monocular Human Motion Capture with a Mixture of Regressors Ankur Agarwal and Bill Triggs GRAVIR-INRIA-CNRS, Grenoble, France IEEE Workshop on Vision for Human-Computer Interaction, 21 June 2005 Visual
Mixture Models and EM
 Table of Content Chapter 9 Mixture Models and EM -means Clustering Gaussian Mixture Models (GMM) Expectation Maximiation (EM) for Mixture Parameter Estimation Introduction Mixture models allows Complex
Table of Content Chapter 9 Mixture Models and EM -means Clustering Gaussian Mixture Models (GMM) Expectation Maximiation (EM) for Mixture Parameter Estimation Introduction Mixture models allows Complex
MOVING OBJECT DETECTION USING BACKGROUND SUBTRACTION ALGORITHM USING SIMULINK
 MOVING OBJECT DETECTION USING BACKGROUND SUBTRACTION ALGORITHM USING SIMULINK Mahamuni P. D 1, R. P. Patil 2, H.S. Thakar 3 1 PG Student, E & TC Department, SKNCOE, Vadgaon Bk, Pune, India 2 Asst. Professor,
MOVING OBJECT DETECTION USING BACKGROUND SUBTRACTION ALGORITHM USING SIMULINK Mahamuni P. D 1, R. P. Patil 2, H.S. Thakar 3 1 PG Student, E & TC Department, SKNCOE, Vadgaon Bk, Pune, India 2 Asst. Professor,
Lecture 10: Semantic Segmentation and Clustering
 Lecture 10: Semantic Segmentation and Clustering Vineet Kosaraju, Davy Ragland, Adrien Truong, Effie Nehoran, Maneekwan Toyungyernsub Department of Computer Science Stanford University Stanford, CA 94305
Lecture 10: Semantic Segmentation and Clustering Vineet Kosaraju, Davy Ragland, Adrien Truong, Effie Nehoran, Maneekwan Toyungyernsub Department of Computer Science Stanford University Stanford, CA 94305
Unsupervised Human Members Tracking Based on an Silhouette Detection and Analysis Scheme
 Unsupervised Human Members Tracking Based on an Silhouette Detection and Analysis Scheme Costas Panagiotakis and Anastasios Doulamis Abstract In this paper, an unsupervised, automatic video human members(human
Unsupervised Human Members Tracking Based on an Silhouette Detection and Analysis Scheme Costas Panagiotakis and Anastasios Doulamis Abstract In this paper, an unsupervised, automatic video human members(human
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Computer Vision 6 Segmentation by Fitting
 Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
An embedded system of Face Recognition based on ARM and HMM
 An embedded system of Face Recognition based on ARM and HMM Yanbin Sun 1,2, Lun Xie 1, Zhiliang Wang 1,Yi An 2 1 Department of Electronic Information Engineering, School of Information Engineering, University
An embedded system of Face Recognition based on ARM and HMM Yanbin Sun 1,2, Lun Xie 1, Zhiliang Wang 1,Yi An 2 1 Department of Electronic Information Engineering, School of Information Engineering, University
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Fitting D.A. Forsyth, CS 543
 Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Robust Pose Estimation using the SwissRanger SR-3000 Camera
 Robust Pose Estimation using the SwissRanger SR- Camera Sigurjón Árni Guðmundsson, Rasmus Larsen and Bjarne K. Ersbøll Technical University of Denmark, Informatics and Mathematical Modelling. Building,
Robust Pose Estimation using the SwissRanger SR- Camera Sigurjón Árni Guðmundsson, Rasmus Larsen and Bjarne K. Ersbøll Technical University of Denmark, Informatics and Mathematical Modelling. Building,
A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect
 A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect Diana Beltran and Luis Basañez Technical University of Catalonia, Barcelona, Spain {diana.beltran,luis.basanez}@upc.edu
A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect Diana Beltran and Luis Basañez Technical University of Catalonia, Barcelona, Spain {diana.beltran,luis.basanez}@upc.edu
L16. Scan Matching and Image Formation
 EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
Random projection for non-gaussian mixture models
 Random projection for non-gaussian mixture models Győző Gidófalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract Recently,
Random projection for non-gaussian mixture models Győző Gidófalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract Recently,
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Operators-Based on Second Derivative double derivative Laplacian operator Laplacian Operator Laplacian Of Gaussian (LOG) Operator LOG
 Operator LOG") Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Norbert Schuff VA Medical Center and UCSF
 Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
IMAGE SEGMENTATION. Václav Hlaváč
 IMAGE SEGMENTATION Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/ hlavac, hlavac@fel.cvut.cz
IMAGE SEGMENTATION Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/ hlavac, hlavac@fel.cvut.cz
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Photoneo's brand new PhoXi 3D Camera is the highest resolution and highest accuracy area based 3D
 Company: Photoneo s.r.o. Germany Contact: Veronika Pulisova E-mail: pulisova@photoneo.com PhoXi 3D Camera Author: Tomas Kovacovsky & Jan Zizka Description of the innovation: General description Photoneo's
Company: Photoneo s.r.o. Germany Contact: Veronika Pulisova E-mail: pulisova@photoneo.com PhoXi 3D Camera Author: Tomas Kovacovsky & Jan Zizka Description of the innovation: General description Photoneo's
Computer Vision I. Dense Stereo Correspondences. Anita Sellent 1/15/16
 Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Automatic Detection of Texture Defects using Texture-Periodicity and Gabor Wavelets
 Abstract Automatic Detection of Texture Defects using Texture-Periodicity and Gabor Wavelets V Asha 1, N U Bhajantri, and P Nagabhushan 3 1 New Horizon College of Engineering, Bangalore, Karnataka, India
Abstract Automatic Detection of Texture Defects using Texture-Periodicity and Gabor Wavelets V Asha 1, N U Bhajantri, and P Nagabhushan 3 1 New Horizon College of Engineering, Bangalore, Karnataka, India
Supplemental Material: Detailed, accurate, human shape estimation from clothed 3D scan sequences
 Supplemental Material: Detailed, accurate, human shape estimation from clothed 3D scan sequences Chao Zhang 1,2, Sergi Pujades 1, Michael Black 1, and Gerard Pons-Moll 1 1 MPI for Intelligent Systems,
Supplemental Material: Detailed, accurate, human shape estimation from clothed 3D scan sequences Chao Zhang 1,2, Sergi Pujades 1, Michael Black 1, and Gerard Pons-Moll 1 1 MPI for Intelligent Systems,
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
A Feature Point Matching Based Approach for Video Objects Segmentation
 A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
DEVELOPMENT OF A PROBABILISTIC SENSOR MODEL FOR A 3D IMAGING SYSTEM
 24th International Symposium on on Automation & Robotics in in Construction (ISARC 2007) Construction Automation Group, I.I.T. Madras DEVELOPMENT OF A PROBABILISTIC SENSOR MODEL FOR A 3D IMAGING SYSTEM
24th International Symposium on on Automation & Robotics in in Construction (ISARC 2007) Construction Automation Group, I.I.T. Madras DEVELOPMENT OF A PROBABILISTIC SENSOR MODEL FOR A 3D IMAGING SYSTEM
Machine Learning. B. Unsupervised Learning B.1 Cluster Analysis. Lars Schmidt-Thieme, Nicolas Schilling
 Machine Learning B. Unsupervised Learning B.1 Cluster Analysis Lars Schmidt-Thieme, Nicolas Schilling Information Systems and Machine Learning Lab (ISMLL) Institute for Computer Science University of Hildesheim,
Machine Learning B. Unsupervised Learning B.1 Cluster Analysis Lars Schmidt-Thieme, Nicolas Schilling Information Systems and Machine Learning Lab (ISMLL) Institute for Computer Science University of Hildesheim,
Lecture 11: E-M and MeanShift. CAP 5415 Fall 2007
 Lecture 11: E-M and MeanShift CAP 5415 Fall 2007 Review on Segmentation by Clustering Each Pixel Data Vector Example (From Comanciu and Meer) Review of k-means Let's find three clusters in this data These
Lecture 11: E-M and MeanShift CAP 5415 Fall 2007 Review on Segmentation by Clustering Each Pixel Data Vector Example (From Comanciu and Meer) Review of k-means Let's find three clusters in this data These
Online Improvement of Time-of-Flight Camera Accuracy by Automatic Integration Time Adaption
 Online Improvement of Time-of-Flight Camera Accuracy by Automatic Integration Time Adaption Thomas Hoegg Computer Graphics and Multimedia Systems Group University of Siegen, Germany Email: thomas.hoegg@uni-siegen.de
Online Improvement of Time-of-Flight Camera Accuracy by Automatic Integration Time Adaption Thomas Hoegg Computer Graphics and Multimedia Systems Group University of Siegen, Germany Email: thomas.hoegg@uni-siegen.de
A Novel Criterion Function in Feature Evaluation. Application to the Classification of Corks.
 A Novel Criterion Function in Feature Evaluation. Application to the Classification of Corks. X. Lladó, J. Martí, J. Freixenet, Ll. Pacheco Computer Vision and Robotics Group Institute of Informatics and
A Novel Criterion Function in Feature Evaluation. Application to the Classification of Corks. X. Lladó, J. Martí, J. Freixenet, Ll. Pacheco Computer Vision and Robotics Group Institute of Informatics and
CIS 520, Machine Learning, Fall 2015: Assignment 7 Due: Mon, Nov 16, :59pm, PDF to Canvas [100 points]
![CIS 520, Machine Learning, Fall 2015: Assignment 7 Due: Mon, Nov 16, :59pm, PDF to Canvas [100 points]](/thumbs/89/100746783.jpg "CIS 520, Machine Learning, Fall 2015: Assignment 7 Due: Mon, Nov 16, :59pm, PDF to Canvas [100 points]") CIS 520, Machine Learning, Fall 2015: Assignment 7 Due: Mon, Nov 16, 2015. 11:59pm, PDF to Canvas [100 points] Instructions. Please write up your responses to the following problems clearly and concisely.
CIS 520, Machine Learning, Fall 2015: Assignment 7 Due: Mon, Nov 16, 2015. 11:59pm, PDF to Canvas [100 points] Instructions. Please write up your responses to the following problems clearly and concisely.
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques
 Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques Sea Chen Department of Biomedical Engineering Advisors: Dr. Charles A. Bouman and Dr. Mark J. Lowe S. Chen Final Exam October
Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques Sea Chen Department of Biomedical Engineering Advisors: Dr. Charles A. Bouman and Dr. Mark J. Lowe S. Chen Final Exam October