Kinect for Windows An Update for Researchers
|
|
|
- Roberta Williamson
- 5 years ago
- Views:
Transcription

1 1
2 Kinect for Windows An Update for Researchers Stewart Tansley, PhD Microsoft Research Connections Special thanks: Prof. Patrick Baudisch, Hasso Plattner Institute and Kinect for Windows product group 2
3 What's New in NUI Where Are We, and Where Might We Go?
4 What's New in NUI Where Are We, and Where Might We Go?


5
6
7 What's New in NUI Where Are We, and Where Might We Go?
8 For me
9 What s your perspective?
10 If you had to build an interactive system for 1-year olds What would be your design objectives?
11 What's New in NUI Where Are We, and Where Might We Go?
12 Quiz

13 We are still living in 1968

14 We are still living in 1968

15 We are still living in 1968
16 But the world is changing

17 "NUI" Computers seeing & hearing us, as we see & hear, via: cameras, mics [image: benko wilson]
18 Design Influences don t so much come from the workplace today, but from
19 film, animation, games,

20 Steve Mann: "metaphor-free computing" [wikipedia]
21 in the 70s, it seemed fair to assume that users had worked in an office
22 2012: the office assumption has failed




23 800 million PCs 5 billion mobile devices
24 So what can we rely on her knowing?
25 The physical world around us
26 touching, pointing, distances inertia, spatial memory, ballistics = very few rules & highly consistent


27 Euclid distances, angles, translation, rotation

28 Newton 1. objects stay at rest / in motion 2. objects accelerate when you apply force 3. you can bump stuff
29 #1 NUI: (good) An interface a "1-year-old" can operate
30 #2 NUI: (better) An interface that a user can operate who only knows Euclid & Newton

31 The screen connects virtual with physical


32 Natural = user and objects form one space
33 #3 NUI: (best?) (ideally) a single Euclidian/Newtonian space that includes display(s) and user
34 Basic NUI principles:
35 What's New in NUI Where Are We, and Where Might We Go?
36 What's New in NUI Where Are We, and Where Might We Go?





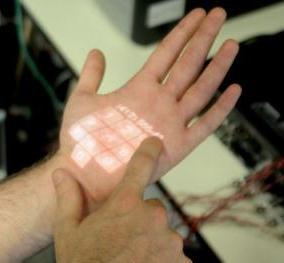

37 Skinput Project Joint work with CMU



38 Humantenna Project Joint work with UW


39 Sensors & Devices Group Joint work with (multiple, EU)



40 Natural Interaction Group Joint work with (multiple, e.g. CMU, UMD, Cornell, UIUC, UCLA, TU Lisbon, RWTH Aachen, HPI, Newcastle )


41 Computer Vision Group Joint work with (multiple, EU)
42 What's New in NUI Where Are We, and Where Might We Go?
43

44


45 Kinect for Windows v1.6 Released October 8, 2012 Wider availability China! Next: Chile, Colombia, Czech Republic, Greece, Hungary, Poland, Puerto Rico 38 markets by end of year New features: Extended sensor data access Improved developer tools Greater support for operating systems 45
46 Kinect for Windows v1.6 Features - 1 Extended sensor data access Data from sensor's 3-axis accelerometer now exposed Enables detection of sensor's orientation Extended-range depth data beyond 4m Lower accuracy, but extends usage scenarios Color camera settings Brightness and exposure, to tune sensor to environment Infrared stream now exposed Many scenarios, such as calibrating other color cameras to the depth sensor or capturing grayscale images in low-light Faster toggling of IR to support multiple overlapping sensors 46
47 Kinect for Windows v1.6 Features - 2 Improved developer tools Kinect Studio updated to support all new sensor data features German speech recognition language pack Skeletal tracking now supported on multiple sensors within a single application New samples How to use all the new SDK features New sample demonstrates a best-in-class UI based on the Kinect for Windows Human Interface Guidelines Basic Interactions WPF sample 47
48 Kinect for Windows v1.6 Features - 3 Greater support for operating systems Windows 8 desktop compatibility Development with Visual Studio 2012 and Microsoft.NET Framework 4.5 Virtual Machine support Works on Windows running in a VM Tested: Microsoft Hyper-V, VMWare, Parallels Remember: all new features are supported on the Kinect for Windows sensor Not the Xbox 360 sensor! See for availability 48
49 What's New in NUI Where Are We, and Where Might We Go?

50 NUI Digital Physical
51 Resources #KinectWindows

52 Thank you!
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
GTC Interaction Simplified. Gesture Recognition Everywhere: Gesture Solutions on Tegra
 GTC 2013 Interaction Simplified Gesture Recognition Everywhere: Gesture Solutions on Tegra eyesight at a Glance Touch-free technology providing an enhanced user experience. Easy and intuitive control
GTC 2013 Interaction Simplified Gesture Recognition Everywhere: Gesture Solutions on Tegra eyesight at a Glance Touch-free technology providing an enhanced user experience. Easy and intuitive control
Margarita Grinvald. Gesture recognition for Smartphones/Wearables
 Margarita Grinvald Gesture recognition for Smartphones/Wearables Gestures hands, face, body movements non-verbal communication human interaction 2 Gesture recognition interface with computers increase
Margarita Grinvald Gesture recognition for Smartphones/Wearables Gestures hands, face, body movements non-verbal communication human interaction 2 Gesture recognition interface with computers increase
Interaction with the Physical World
 Interaction with the Physical World Methods and techniques for sensing and changing the environment Light Sensing and Changing the Environment Motion and acceleration Sound Proximity and touch RFID Sensors
Interaction with the Physical World Methods and techniques for sensing and changing the environment Light Sensing and Changing the Environment Motion and acceleration Sound Proximity and touch RFID Sensors
Spring 2011 Prof. Hyesoon Kim
 Spring 2011 Prof. Hyesoon Kim Application Geometry Rasterizer CPU Each stage cane be also pipelined The slowest of the pipeline stage determines the rendering speed. Frames per second (fps) Executes on
Spring 2011 Prof. Hyesoon Kim Application Geometry Rasterizer CPU Each stage cane be also pipelined The slowest of the pipeline stage determines the rendering speed. Frames per second (fps) Executes on
A Kinect Sensor based Windows Control Interface
 , pp.113-124 http://dx.doi.org/10.14257/ijca.2014.7.3.12 A Kinect Sensor based Windows Control Interface Sang-Hyuk Lee 1 and Seung-Hyun Oh 2 Department of Computer Science, Dongguk University, Gyeongju,
, pp.113-124 http://dx.doi.org/10.14257/ijca.2014.7.3.12 A Kinect Sensor based Windows Control Interface Sang-Hyuk Lee 1 and Seung-Hyun Oh 2 Department of Computer Science, Dongguk University, Gyeongju,
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Kinect Cursor Control EEE178 Dr. Fethi Belkhouche Christopher Harris Danny Nguyen I. INTRODUCTION
 Kinect Cursor Control EEE178 Dr. Fethi Belkhouche Christopher Harris Danny Nguyen Abstract: An XBOX 360 Kinect is used to develop two applications to control the desktop cursor of a Windows computer. Application
Kinect Cursor Control EEE178 Dr. Fethi Belkhouche Christopher Harris Danny Nguyen Abstract: An XBOX 360 Kinect is used to develop two applications to control the desktop cursor of a Windows computer. Application
CS664 Lecture #16: Image registration, robust statistics, motion
 CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
Computer Animation and Visualisation. Lecture 3. Motion capture and physically-based animation of characters
 Computer Animation and Visualisation Lecture 3. Motion capture and physically-based animation of characters Character Animation There are three methods Create them manually Use real human / animal motions
Computer Animation and Visualisation Lecture 3. Motion capture and physically-based animation of characters Character Animation There are three methods Create them manually Use real human / animal motions
Dr. Shuang LIANG. School of Software Engineering TongJi University
 Human Computer Interface Dr. Shuang LIANG School of Software Engineering TongJi University Today s Topics UI development and Trends NUI Discussion Today s Topics UI development and Trends Development Trends
Human Computer Interface Dr. Shuang LIANG School of Software Engineering TongJi University Today s Topics UI development and Trends NUI Discussion Today s Topics UI development and Trends Development Trends
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Game Programming. Bing-Yu Chen National Taiwan University
 Game Programming Bing-Yu Chen National Taiwan University What is Computer Graphics? Definition the pictorial synthesis of real or imaginary objects from their computer-based models descriptions OUTPUT
Game Programming Bing-Yu Chen National Taiwan University What is Computer Graphics? Definition the pictorial synthesis of real or imaginary objects from their computer-based models descriptions OUTPUT
Real Time Tracking System using 3D Vision
 Real Time Tracking System using 3D Vision Arunava Nag, Sanket Deshmukh December 04,2015 Abstract In this report a Skeleton Tracking approach has been described, using the Xbox 360 Kinect camera, as a solution
Real Time Tracking System using 3D Vision Arunava Nag, Sanket Deshmukh December 04,2015 Abstract In this report a Skeleton Tracking approach has been described, using the Xbox 360 Kinect camera, as a solution
Research Article Motion Control of Robot by using Kinect Sensor
 Research Journal of Applied Sciences, Engineering and Technology 8(11): 1384-1388, 2014 DOI:10.19026/rjaset.8.1111 ISSN: 2040-7459; e-issn: 2040-7467 2014 Maxwell Scientific Publication Corp. Submitted:
Research Journal of Applied Sciences, Engineering and Technology 8(11): 1384-1388, 2014 DOI:10.19026/rjaset.8.1111 ISSN: 2040-7459; e-issn: 2040-7467 2014 Maxwell Scientific Publication Corp. Submitted:
Human Arm Simulation Using Kinect
 Human Arm Simulation Using Kinect Nikunj Agarwal 1, Priya Bajaj 2, Jayesh Pal 3, Piyush Kushwaha 4 1,2,3,4 Student, Computer Science & Engineering Department, IMS Engineering College, Ghaziabad, Uttar
Human Arm Simulation Using Kinect Nikunj Agarwal 1, Priya Bajaj 2, Jayesh Pal 3, Piyush Kushwaha 4 1,2,3,4 Student, Computer Science & Engineering Department, IMS Engineering College, Ghaziabad, Uttar
Mobile UI. Device, Input, Interaction Characteristics. Mobile UI 1
 Mobile UI Device, Input, Interaction Characteristics Mobile UI 1 Desktop and Mobile Mobile UI 2 Why touch? Space optimization! Touch screens combine input and output, which optimizes the display/output
Mobile UI Device, Input, Interaction Characteristics Mobile UI 1 Desktop and Mobile Mobile UI 2 Why touch? Space optimization! Touch screens combine input and output, which optimizes the display/output
Chapter 12 3D Localisation and High-Level Processing
 Chapter 12 3D Localisation and High-Level Processing This chapter describes how the results obtained from the moving object tracking phase are used for estimating the 3D location of objects, based on the
Chapter 12 3D Localisation and High-Level Processing This chapter describes how the results obtained from the moving object tracking phase are used for estimating the 3D location of objects, based on the
Spring 2009 Prof. Hyesoon Kim
 Spring 2009 Prof. Hyesoon Kim Application Geometry Rasterizer CPU Each stage cane be also pipelined The slowest of the pipeline stage determines the rendering speed. Frames per second (fps) Executes on
Spring 2009 Prof. Hyesoon Kim Application Geometry Rasterizer CPU Each stage cane be also pipelined The slowest of the pipeline stage determines the rendering speed. Frames per second (fps) Executes on
CS 775: Advanced Computer Graphics. Lecture 17 : Motion Capture
 CS 775: Advanced Computer Graphics Lecture 17 : History Study of human motion Leonardo da Vinci (1452 1519) History Study of human motion Edward J. Muybridge, 1830 1904 http://en.wikipedia.org/wiki/eadweard_muybridge
CS 775: Advanced Computer Graphics Lecture 17 : History Study of human motion Leonardo da Vinci (1452 1519) History Study of human motion Edward J. Muybridge, 1830 1904 http://en.wikipedia.org/wiki/eadweard_muybridge
Rich Augmented Reality Interactions (without goggles, gloves or 3D trackers)
") Rich Augmented Reality Interactions (without goggles, gloves or 3D trackers) Hrvoje Benko er, MSR Redmond Surface Touch Mouse THE DISCONNECT BETWEEN REAL AND DIGITAL WORLDS Visually rich Call of Duty
Rich Augmented Reality Interactions (without goggles, gloves or 3D trackers) Hrvoje Benko er, MSR Redmond Surface Touch Mouse THE DISCONNECT BETWEEN REAL AND DIGITAL WORLDS Visually rich Call of Duty
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
LICENSE PLATE RECOGNITION SETUP AND FIELD INSTALLATION GUIDE
 LICENSE PLATE RECOGNITION SETUP AND FIELD INSTALLATION GUIDE This document was created to benchmark the settings and tools needed to successfully deploy LPR with the ipconfigure s Enterprise Surveillance
LICENSE PLATE RECOGNITION SETUP AND FIELD INSTALLATION GUIDE This document was created to benchmark the settings and tools needed to successfully deploy LPR with the ipconfigure s Enterprise Surveillance
Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors
 Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors Sriram Sethuraman Technologist & DMTS, Ittiam 1 Overview Imaging on Smart-phones
Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors Sriram Sethuraman Technologist & DMTS, Ittiam 1 Overview Imaging on Smart-phones
Implementation of Kinetic Typography by Motion Recognition Sensor
 Implementation of Kinetic Typography by Motion Recognition Sensor Sooyeon Lim, Sangwook Kim Department of Digital Media Art, Kyungpook National University, Korea School of Computer Science and Engineering,
Implementation of Kinetic Typography by Motion Recognition Sensor Sooyeon Lim, Sangwook Kim Department of Digital Media Art, Kyungpook National University, Korea School of Computer Science and Engineering,
Khronos and the Mobile Ecosystem
 Copyright Khronos Group, 2011 - Page 1 Khronos and the Mobile Ecosystem Neil Trevett VP Mobile Content, NVIDIA President, Khronos Copyright Khronos Group, 2011 - Page 2 Topics It s not just about individual
Copyright Khronos Group, 2011 - Page 1 Khronos and the Mobile Ecosystem Neil Trevett VP Mobile Content, NVIDIA President, Khronos Copyright Khronos Group, 2011 - Page 2 Topics It s not just about individual
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
CS-184: Computer Graphics. Introduction to Animation. Lecture #17: Introduction to Animation. 17-AnimationIntro.key - April 15, 2014
 1 CS-184: Computer Graphics Lecture #17: Introduction to Animation!! Prof. James O Brien University of California, Berkeley! V2014-S-17-1.0 Introduction to Animation 2 Generate perception of motion with
1 CS-184: Computer Graphics Lecture #17: Introduction to Animation!! Prof. James O Brien University of California, Berkeley! V2014-S-17-1.0 Introduction to Animation 2 Generate perception of motion with
MediaTek Natural User Interface
 MediaTek White Paper October 2014 2014 MediaTek Inc. Table of Contents 1 Introduction... 3 2 Computer Vision Technology... 7 3 Voice Interface Technology... 9 3.1 Overview... 9 3.2 Voice Keyword Control...
MediaTek White Paper October 2014 2014 MediaTek Inc. Table of Contents 1 Introduction... 3 2 Computer Vision Technology... 7 3 Voice Interface Technology... 9 3.1 Overview... 9 3.2 Voice Keyword Control...
Virtual Production for the Real World Using Autodesk MotionBuilder 2013
 Virtual Production for the Real World Using Autodesk MotionBuilder 2013 Daryl Obert Autodesk Hein Beute- Xsens DG3148 This class will give attendees a firm understanding of the concepts and workflows involved
Virtual Production for the Real World Using Autodesk MotionBuilder 2013 Daryl Obert Autodesk Hein Beute- Xsens DG3148 This class will give attendees a firm understanding of the concepts and workflows involved
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Development of 3D Image Manipulation Software Utilizing the Microsoft Kinect
 Development of 3D Image Manipulation Software Utilizing the Microsoft Kinect A report submitted to the School of Engineering and Energy, Murdoch University in partial fulfilment of the requirements for
Development of 3D Image Manipulation Software Utilizing the Microsoft Kinect A report submitted to the School of Engineering and Energy, Murdoch University in partial fulfilment of the requirements for
Index C, D, E, F I, J
 Index A Ambient light, 12 B Blurring algorithm, 68 Brightness thresholding algorithm float testapp::blur, 70 kinect.update(), 69 void testapp::draw(), 70 void testapp::exit(), 70 void testapp::setup(),
Index A Ambient light, 12 B Blurring algorithm, 68 Brightness thresholding algorithm float testapp::blur, 70 kinect.update(), 69 void testapp::draw(), 70 void testapp::exit(), 70 void testapp::setup(),
Graphical System Design Platform. NI LabVIEW. Test and Measurement Industrial Measurements and Control Embedded Design. ni.
 Graphical System Design Platform NI LabVIEW Test and Measurement Industrial Measurements and Control Embedded Design The LabVIEW Story For more than 20 years, engineers and scientists around the world
Graphical System Design Platform NI LabVIEW Test and Measurement Industrial Measurements and Control Embedded Design The LabVIEW Story For more than 20 years, engineers and scientists around the world
Capturing Reality with Point Clouds: Applications, Challenges and Solutions
 Capturing Reality with Point Clouds: Applications, Challenges and Solutions Rico Richter 1 st February 2017 Oracle Spatial Summit at BIWA 2017 Hasso Plattner Institute Point Cloud Analytics and Visualization
Capturing Reality with Point Clouds: Applications, Challenges and Solutions Rico Richter 1 st February 2017 Oracle Spatial Summit at BIWA 2017 Hasso Plattner Institute Point Cloud Analytics and Visualization
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Kinect: getting started. Michela Goffredo University Roma TRE
 Kinect: getting started 2 Michela Goffredo University Roma TRE goffredo@uniroma3.it What s Kinect Sensor Microsoft Kinect is a motion sensor by Microsoft Xbox which allows to extract: RGB video stream
Kinect: getting started 2 Michela Goffredo University Roma TRE goffredo@uniroma3.it What s Kinect Sensor Microsoft Kinect is a motion sensor by Microsoft Xbox which allows to extract: RGB video stream
Facoltà di Ingegneria. Kinect calibration. Ilya Afanasyev Trento, /01/2012 1/20
 Facoltà di Ingegneria Kinect calibration Ilya Afanasyev Trento, 2012 25/01/2012 1/20 Content 1. The description. 2. About the existing software. 3. Tests of Nicolas Burrus software binaries. 4. Open Kinect
Facoltà di Ingegneria Kinect calibration Ilya Afanasyev Trento, 2012 25/01/2012 1/20 Content 1. The description. 2. About the existing software. 3. Tests of Nicolas Burrus software binaries. 4. Open Kinect
Hautant's Test Based on Kinect Skeleton Tracking Feature
 Hautant's Test Based on Kinect Skeleton Tracking Feature DOLINAY VILIAM, PIVNICKOVA LUCIE, VASEK VLADIMIR Faculty of Applied Informatics Tomas Bata University in Zlin Nad Stranemi 4511, Zlin CZECH REPUBLIC
Hautant's Test Based on Kinect Skeleton Tracking Feature DOLINAY VILIAM, PIVNICKOVA LUCIE, VASEK VLADIMIR Faculty of Applied Informatics Tomas Bata University in Zlin Nad Stranemi 4511, Zlin CZECH REPUBLIC
Structure from Motion. Lecture-15
 Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
Body-Tracking Camera Control for Demonstration Videos
 1:43 AM Body-Tracking Camera Control for Demonstration Videos Derrick Cheng Björn Hartmann University of California, Berkeley University of California, Berkeley 354 Hearst Memorial Mining 533 Soda Hall
1:43 AM Body-Tracking Camera Control for Demonstration Videos Derrick Cheng Björn Hartmann University of California, Berkeley University of California, Berkeley 354 Hearst Memorial Mining 533 Soda Hall
Getting Started with Microsoft Kinect for FRC
 v2.3 January 3 rd, 2012 Page 1 of 14 Getting Started with Microsoft Kinect for FRC Before proceeding, make sure you do not have any existing Kinect drivers on your computer. If you have previously installed
v2.3 January 3 rd, 2012 Page 1 of 14 Getting Started with Microsoft Kinect for FRC Before proceeding, make sure you do not have any existing Kinect drivers on your computer. If you have previously installed
Hand Gesture Recognition with Microsoft Kinect A Computer Player for the Rock-paper-scissors Game
 Hand Gesture Recognition with Microsoft Kinect A Computer Player for the Rock-paper-scissors Game Vladan Jovičić, Marko Palangetić University of Primorska Faculty of Mathematics, Natural Sciences and Information
Hand Gesture Recognition with Microsoft Kinect A Computer Player for the Rock-paper-scissors Game Vladan Jovičić, Marko Palangetić University of Primorska Faculty of Mathematics, Natural Sciences and Information
OUTDOOR AND INDOOR NAVIGATION WITH MICROSOFT KINECT
 DICA-Dept. of Civil and Environmental Engineering Geodesy and Geomatics Section OUTDOOR AND INDOOR NAVIGATION WITH MICROSOFT KINECT Diana Pagliari Livio Pinto OUTLINE 2 The Microsoft Kinect sensor The
DICA-Dept. of Civil and Environmental Engineering Geodesy and Geomatics Section OUTDOOR AND INDOOR NAVIGATION WITH MICROSOFT KINECT Diana Pagliari Livio Pinto OUTLINE 2 The Microsoft Kinect sensor The
Security Management System Camera Configuration Guidelines (Document Version )
") Security Management System Camera Configuration Guidelines (Document Version 12.12.15.01) Note Camera in this document related to all video streaming devices like video cameras, encoders etc. Security
Security Management System Camera Configuration Guidelines (Document Version 12.12.15.01) Note Camera in this document related to all video streaming devices like video cameras, encoders etc. Security
The NAO Robot, a case of study Robotics Franchi Alessio Mauro
 The NAO Robot, a case of study Robotics 2013-2014 Franchi Alessio Mauro alessiomauro.franchi@polimi.it Who am I? Franchi Alessio Mauro Master Degree in Computer Science Engineer at Politecnico of Milan
The NAO Robot, a case of study Robotics 2013-2014 Franchi Alessio Mauro alessiomauro.franchi@polimi.it Who am I? Franchi Alessio Mauro Master Degree in Computer Science Engineer at Politecnico of Milan
CS-184: Computer Graphics. Introduction to Animation. Generate perception of motion with sequence of image shown in rapid succession
 CS-184: Computer Graphics Lecture #17: Introduction to Animation Prof. James O Brien University of California, Berkeley V2008-F-17-1.0 1 Introduction to Animation Generate perception of motion with sequence
CS-184: Computer Graphics Lecture #17: Introduction to Animation Prof. James O Brien University of California, Berkeley V2008-F-17-1.0 1 Introduction to Animation Generate perception of motion with sequence
Probabilistic 2D Acoustic Source Localization Using Direction of Arrivals in Robot Sensor Networks
 Probabilistic 2D Acoustic Source Localization Using Direction of Arrivals in Robot Sensor Networks Riccardo Levorato and Enrico Pagello Department of Information Engineering, University of Padova, Italy
Probabilistic 2D Acoustic Source Localization Using Direction of Arrivals in Robot Sensor Networks Riccardo Levorato and Enrico Pagello Department of Information Engineering, University of Padova, Italy
Dataliner Message Displays Using DL50 Slaves with a DL40 Master
 ALLEN-BRADLEY Dataliner Message Displays Introduction This application note describes how to use Dataliner DL50 slave displays with a DL40 display as a master. The DL40 master display contains all messages
ALLEN-BRADLEY Dataliner Message Displays Introduction This application note describes how to use Dataliner DL50 slave displays with a DL40 display as a master. The DL40 master display contains all messages
Automatic Recognition of Postoperative Shoulder Surgery Physical Therapy Exercises from Depth Camera Images
 Proceedings of The National Conference On Undergraduate Research (NCUR) 2015 Eastern Washington University, Cheney, WA April 16-18, 2015 Automatic Recognition of Postoperative Shoulder Surgery Physical
Proceedings of The National Conference On Undergraduate Research (NCUR) 2015 Eastern Washington University, Cheney, WA April 16-18, 2015 Automatic Recognition of Postoperative Shoulder Surgery Physical
Collaboration is encouraged among small groups (e.g., 2-3 students).
.") Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Complete High-Speed Motion Capture System
 Xcitex Professional Motion System Complete High-Speed Motion Capture System Life Sciences Engineering Manufacturing Automotive Up to 5 hours of continuous recording 5 1000 fps high resolution cameras Synchronize
Xcitex Professional Motion System Complete High-Speed Motion Capture System Life Sciences Engineering Manufacturing Automotive Up to 5 hours of continuous recording 5 1000 fps high resolution cameras Synchronize
Leveraging Mobile Interaction with Sensor-Driven and Multimodal User Interfaces"
 Leveraging Mobile Interaction with Sensor-Driven and Multimodal User Interfaces Andreas Möller Betreuer: Prof. Dr. Matthias Kranz Doktorandenseminar an der LMU München Institute for Media Technology My
Leveraging Mobile Interaction with Sensor-Driven and Multimodal User Interfaces Andreas Möller Betreuer: Prof. Dr. Matthias Kranz Doktorandenseminar an der LMU München Institute for Media Technology My
Advanced Gemstone Shaders
 Advanced Gemstone Shaders Introduction: I am fascinated from crystals and minerals and gemstones. As a game developer, I always look for solutions to simulate such precious stones. When most people hear
Advanced Gemstone Shaders Introduction: I am fascinated from crystals and minerals and gemstones. As a game developer, I always look for solutions to simulate such precious stones. When most people hear
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Animation by Adaptation
 Animation by Adaptation Michael Gleicher Graphics Group Department of Computer Sciences University of Wisconsin Madison http://www.cs.wisc.edu/graphics The Dream: Animation for Everyone! Animation is great
Animation by Adaptation Michael Gleicher Graphics Group Department of Computer Sciences University of Wisconsin Madison http://www.cs.wisc.edu/graphics The Dream: Animation for Everyone! Animation is great
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
The 3D Terrain Interactive Technique Based on Gesture Recognition Yanyan Li1, a, Xiaomeng Xu2, b, Jiayu Sun3, c, Haimeng Zhao4, d*
 Joint International Information Technology, Mechanical and Electronic Engineering Conference (JIMEC 2016) The 3D Terrain Interactive Technique Based on Gesture Recognition Yanyan Li1, a, Xiaomeng Xu2,
Joint International Information Technology, Mechanical and Electronic Engineering Conference (JIMEC 2016) The 3D Terrain Interactive Technique Based on Gesture Recognition Yanyan Li1, a, Xiaomeng Xu2,
Ubi Quick Start Guide
 Ubi Quick Start Guide Version 2.3 Ubi Interactive Inc. All Rights Reserved. Contents 1. Quick Start... 3 1. Activate Ubi... 4 2. Connect the Kinect sensor... 5 3. Launch Ubi... 6 4. Position the Kinect
Ubi Quick Start Guide Version 2.3 Ubi Interactive Inc. All Rights Reserved. Contents 1. Quick Start... 3 1. Activate Ubi... 4 2. Connect the Kinect sensor... 5 3. Launch Ubi... 6 4. Position the Kinect
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Skeleton based Human Action Recognition using Kinect
 Skeleton based Human Action Recognition using Kinect Ayushi Gahlot Purvi Agarwal Akshya Agarwal Vijai Singh IMS Engineering college, Amit Kumar Gautam ABSTRACT This paper covers the aspects of action recognition
Skeleton based Human Action Recognition using Kinect Ayushi Gahlot Purvi Agarwal Akshya Agarwal Vijai Singh IMS Engineering college, Amit Kumar Gautam ABSTRACT This paper covers the aspects of action recognition
8510 AC Spindle Drive Hardware/Firmware Replacement
 ALLEN-BRADLEY 8510 AC Spindle Drive Hardware/Firmware Replacement Instructions Introduction The purpose of this publication is to describe the steps needed to replace the circuit boards and/or firmware
ALLEN-BRADLEY 8510 AC Spindle Drive Hardware/Firmware Replacement Instructions Introduction The purpose of this publication is to describe the steps needed to replace the circuit boards and/or firmware
Motion Analysis. Motion analysis. Now we will talk about. Differential Motion Analysis. Motion analysis. Difference Pictures
 Now we will talk about Motion Analysis Motion analysis Motion analysis is dealing with three main groups of motionrelated problems: Motion detection Moving object detection and location. Derivation of
Now we will talk about Motion Analysis Motion analysis Motion analysis is dealing with three main groups of motionrelated problems: Motion detection Moving object detection and location. Derivation of
Instructions. (For 6180 Industrial Computers) Applications. Overview & Safety
 Applications. Overview & Safety") Instructions (For 6180 Industrial Computers) Applications This instruction sheet describes how to replace the following displays and backlights for 6180 Industrial Computers. All display kits contain a
Instructions (For 6180 Industrial Computers) Applications This instruction sheet describes how to replace the following displays and backlights for 6180 Industrial Computers. All display kits contain a
Introduction to Computer Vision
 Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Single Camera Calibration
 Single Camera Calibration using Partially Visible Calibration Objects Based on Random Dots Marker Tracking Algorithm *Yuji Oyamada1,2, Pascal Fallavollita2, and Nassir Navab2 1. Keio University, Japan
Single Camera Calibration using Partially Visible Calibration Objects Based on Random Dots Marker Tracking Algorithm *Yuji Oyamada1,2, Pascal Fallavollita2, and Nassir Navab2 1. Keio University, Japan
DetectWORKS License Plate Recognition System. User Manual.
 DetectWORKS License Plate Recognition System. User Manual. Contents Overview...4 1. Installation Guide...5 1.1. Camera...5 1.1.1 Camera Model Choice...5 1.1.2 Camera mounting...5 1.1.3 Capture at night...6
DetectWORKS License Plate Recognition System. User Manual. Contents Overview...4 1. Installation Guide...5 1.1. Camera...5 1.1.1 Camera Model Choice...5 1.1.2 Camera mounting...5 1.1.3 Capture at night...6
The Implementation of a Glove-Based User Interface
 The Implementation of a Glove-Based User Interface Chris Carey January 26, 2010 Abstract Multi-touch interfaces have been rising in usage because of how their multiple points of input simplify the execution
The Implementation of a Glove-Based User Interface Chris Carey January 26, 2010 Abstract Multi-touch interfaces have been rising in usage because of how their multiple points of input simplify the execution
Computer Vision on Tegra K1. Chen Sagiv SagivTech Ltd.
 Computer Vision on Tegra K1 Chen Sagiv SagivTech Ltd. Established in 2009 and headquartered in Israel Core domain expertise: GPU Computing and Computer Vision What we do: - Technology - Solutions - Projects
Computer Vision on Tegra K1 Chen Sagiv SagivTech Ltd. Established in 2009 and headquartered in Israel Core domain expertise: GPU Computing and Computer Vision What we do: - Technology - Solutions - Projects
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation
 A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
Multimedia Technology CHAPTER 4. Video and Animation
 CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
AUTOMATED DISPENSING SYSTEMS
 AUTOMATED DISPENSING SYSTEMS EV Series PRO Series Automated Dispensing Systems Nordson EFD s range of automated dispensing systems are specifically designed and configured for precise fluid dispensing
AUTOMATED DISPENSING SYSTEMS EV Series PRO Series Automated Dispensing Systems Nordson EFD s range of automated dispensing systems are specifically designed and configured for precise fluid dispensing
Track-based Gesture Recognition Method Based on Kinect
 2016 International Congress on Computation Algorithms in Engineering (ICCAE 2016) ISBN: 978-1-60595-386-1 Track-based Gesture Recognition Method Based on Kinect Ying Wang* Computer Information Center,
2016 International Congress on Computation Algorithms in Engineering (ICCAE 2016) ISBN: 978-1-60595-386-1 Track-based Gesture Recognition Method Based on Kinect Ying Wang* Computer Information Center,
CS-184: Computer Graphics. Administrative
 CS-184: Computer Graphics Lecture #17: Introduction to Animation Prof. James O Brien University of California, Berkeley V2005-17-1.1 Administrative You should have turned in project proposal Assignment
CS-184: Computer Graphics Lecture #17: Introduction to Animation Prof. James O Brien University of California, Berkeley V2005-17-1.1 Administrative You should have turned in project proposal Assignment
Frequently Asked Questions
 Autodesk MotionBuilder 2012 Frequently Asked Questions Autodesk MotionBuilder 2012 software is a leading real-time animation software: an ideal tool for high-volume game animation pipelines, director-driven
Autodesk MotionBuilder 2012 Frequently Asked Questions Autodesk MotionBuilder 2012 software is a leading real-time animation software: an ideal tool for high-volume game animation pipelines, director-driven
Maximizing GPU Power for Vision and Depth Sensor Processing. From NVIDIA's Tegra K1 to GPUs on the Cloud. Chen Sagiv Eri Rubin SagivTech Ltd.
 Maximizing GPU Power for Vision and Depth Sensor Processing From NVIDIA's Tegra K1 to GPUs on the Cloud Chen Sagiv Eri Rubin SagivTech Ltd. Today s Talk Mobile Revolution Mobile Cloud Concept 3D Imaging
Maximizing GPU Power for Vision and Depth Sensor Processing From NVIDIA's Tegra K1 to GPUs on the Cloud Chen Sagiv Eri Rubin SagivTech Ltd. Today s Talk Mobile Revolution Mobile Cloud Concept 3D Imaging
The Film and Digital camera. The use of photographic film was introduced by George Eastman who started
 Thapa, 1 Anup Thapa Anna Voisard ENGL 21007 - A October 24, 2016 The Film and Digital camera Film/Analog Camera: The use of photographic film was introduced by George Eastman who started manufacturing
Thapa, 1 Anup Thapa Anna Voisard ENGL 21007 - A October 24, 2016 The Film and Digital camera Film/Analog Camera: The use of photographic film was introduced by George Eastman who started manufacturing
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Sony develops transparent lens eyewear SmartEyeglass - Announces availability of software development kit -
 News & Information 1-7-1 Konan, Minato-ku, Tokyo 108-0075, Japan Sony Corporation No. 14-090E September 19, 2014 Sony develops transparent lens eyewear SmartEyeglass - Announces availability of software
News & Information 1-7-1 Konan, Minato-ku, Tokyo 108-0075, Japan Sony Corporation No. 14-090E September 19, 2014 Sony develops transparent lens eyewear SmartEyeglass - Announces availability of software
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Brief Intro on Mobile Platforms and Dev. Tools
 Brief Intro on Mobile Platforms and Dev. Tools Top Mobile Operating Systems!! - Android by Google Inc. - ios by Apple Inc. - BlackBerry OS by RIM - Symbian OS by Nokia and Accenture - Windows 8 by Microsoft
Brief Intro on Mobile Platforms and Dev. Tools Top Mobile Operating Systems!! - Android by Google Inc. - ios by Apple Inc. - BlackBerry OS by RIM - Symbian OS by Nokia and Accenture - Windows 8 by Microsoft
How to Adjust the Back Focus for TCM-5311
 How to Adjust the Back Focus for TCM-5311 Category Type Camera Model Firmware Version Configuration Note TCM-5311 N/A Publish Date 2009/09/03 Last Review 2009/09/03 Knowledge Type Function Type Video Quality
How to Adjust the Back Focus for TCM-5311 Category Type Camera Model Firmware Version Configuration Note TCM-5311 N/A Publish Date 2009/09/03 Last Review 2009/09/03 Knowledge Type Function Type Video Quality
Global 3D Depth Sensor Market: Industry Analysis & Outlook ( )
") Industry Research by Koncept Analytics Global 3D Depth Sensor Market: Industry Analysis & Outlook ----------------------------------------- November 2017 1 Executive Summary 3D depth sensors, also known
Industry Research by Koncept Analytics Global 3D Depth Sensor Market: Industry Analysis & Outlook ----------------------------------------- November 2017 1 Executive Summary 3D depth sensors, also known
TUTORIAL: MoveYourRobot with Unity3D You created your own robot with servo- motors and you are wondering how to control it.
 TUTORIAL: MoveYourRobot with Unity3D You created your own robot with servo- motors and you are wondering how to control it. This package provide environment and scripts to be easily able to control your
TUTORIAL: MoveYourRobot with Unity3D You created your own robot with servo- motors and you are wondering how to control it. This package provide environment and scripts to be easily able to control your
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
CAR BLACK BOX. Beyond Security. User Manual
 CAR BLACK BOX Beyond Security User Manual Camera can be rotated 180 degrees only to the direction of driver's seat. This user manual can be modified for the function enhancement of product without prior
CAR BLACK BOX Beyond Security User Manual Camera can be rotated 180 degrees only to the direction of driver's seat. This user manual can be modified for the function enhancement of product without prior
ACTIVITY FIVE-A NEWTON S SECOND LAW: THE ATWOOD MACHINE
 1 ACTIVITY FIVE-A NEWTON S SECOND LAW: THE ATWOOD MACHINE PURPOSE For this experiment, the Motion Visualizer (MV) is used to capture the motion of two masses which are suspended above the ground and connected
1 ACTIVITY FIVE-A NEWTON S SECOND LAW: THE ATWOOD MACHINE PURPOSE For this experiment, the Motion Visualizer (MV) is used to capture the motion of two masses which are suspended above the ground and connected
Robotic Systems ECE 401RB Fall 2006
 The following notes are from: Robotic Systems ECE 401RB Fall 2006 Lecture 15: Processors Part 3 Chapter 14, G. McComb, and M. Predko, Robot Builder's Bonanza, Third Edition, Mc- Graw Hill, 2006. I. Peripherals
The following notes are from: Robotic Systems ECE 401RB Fall 2006 Lecture 15: Processors Part 3 Chapter 14, G. McComb, and M. Predko, Robot Builder's Bonanza, Third Edition, Mc- Graw Hill, 2006. I. Peripherals
CS Decision Trees / Random Forests
 CS548 2015 Decision Trees / Random Forests Showcase by: Lily Amadeo, Bir B Kafle, Suman Kumar Lama, Cody Olivier Showcase work by Jamie Shotton, Andrew Fitzgibbon, Richard Moore, Mat Cook, Alex Kipman,
CS548 2015 Decision Trees / Random Forests Showcase by: Lily Amadeo, Bir B Kafle, Suman Kumar Lama, Cody Olivier Showcase work by Jamie Shotton, Andrew Fitzgibbon, Richard Moore, Mat Cook, Alex Kipman,
A Virtual Dressing Room Using Kinect
 2017 IJSRST Volume 3 Issue 3 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology A Virtual Dressing Room Using Kinect Jagtap Prajakta Bansidhar, Bhole Sheetal Hiraman, Mate
2017 IJSRST Volume 3 Issue 3 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology A Virtual Dressing Room Using Kinect Jagtap Prajakta Bansidhar, Bhole Sheetal Hiraman, Mate
Applications. Systems. Motion capture pipeline. Biomechanical analysis. Graphics research
 Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
CS-184: Computer Graphics. Today
 CS-184: Computer Graphics Lecture #18: Introduction to Animation Prof. James O Brien University of California, Berkeley V2005-18-1.0 Today Tessellation Introduction to Animation 2 Adaptive Tessellation
CS-184: Computer Graphics Lecture #18: Introduction to Animation Prof. James O Brien University of California, Berkeley V2005-18-1.0 Today Tessellation Introduction to Animation 2 Adaptive Tessellation
OPERATION MANUAL. IWB Setup Software/EyeRIS IX NEC edition
 IWB Setup Software/EyeRIS IX NEC edition OPERATION MANUAL This manual describes installation and operation procedures of the driver / the calibration software The Interactive Whiteboard Kit and projector
IWB Setup Software/EyeRIS IX NEC edition OPERATION MANUAL This manual describes installation and operation procedures of the driver / the calibration software The Interactive Whiteboard Kit and projector
Trimble Engineering & Construction Group, 5475 Kellenburger Road, Dayton, OH , USA
 Trimble VISION Ken Joyce Martin Koehler Michael Vogel Trimble Engineering and Construction Group Westminster, Colorado, USA April 2012 Trimble Engineering & Construction Group, 5475 Kellenburger Road,
Trimble VISION Ken Joyce Martin Koehler Michael Vogel Trimble Engineering and Construction Group Westminster, Colorado, USA April 2012 Trimble Engineering & Construction Group, 5475 Kellenburger Road,
CISCO IP PHONE 7970G NEW! CISCO IP PHONE 7905G AND 7912G XML
 Q & A CISCO IP PHONE 7970G NEW! CISCO IP PHONE 7905G AND 7912G XML GENERAL QUESTIONS Q. What is the Cisco IP Phone 7970G? A. The 7970G is our latest state-of-the-art IP phone, which includes a large color,
Q & A CISCO IP PHONE 7970G NEW! CISCO IP PHONE 7905G AND 7912G XML GENERAL QUESTIONS Q. What is the Cisco IP Phone 7970G? A. The 7970G is our latest state-of-the-art IP phone, which includes a large color,
Stereo Epipolar Geometry for General Cameras. Sanja Fidler CSC420: Intro to Image Understanding 1 / 33
 Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja