Space Robotics. Lecture #23 November 15, 2016 Robotic systems Docking and berthing interfaces Attachment mechanisms MARYLAND U N I V E R S I T Y O F
|
|
|
- Lawrence Rodger Blankenship
- 6 years ago
- Views:
Transcription
1 Lecture #23 November 15, 2016 Robotic systems Docking and berthing interfaces Attachment mechanisms David L. Akin - All rights reserved
2 Shuttle Remote Manipulator System 2

3 RMS Wrist Mechanisms 3

4 RMS Grapple Fixture and Target 4

5 RMS Grapple Fixture (corroded!) 5
6 Shuttle RMS Grapple Tolerances 6
7 Capture Before Contact Need to control position and attitude of servicing/assembly targets Generally in free drift mode prior to grapple Small impacts produce substantial counterreactions (e.g., Solar Max) Goal for grapple devices: capture before contact Envelope some aspect of target to prevent escape before any contact is made Rigidize grapple after capture 7
8 Shuttle RMS Grapple Procedure (1) 8
9 Shuttle RMS Grapple Procedure (2) 9

10 Shuttle RMS Grapple Procedure (3) 10

11 Space Station Remote Manipulator System 11
12 Space Station Remote Manipulator System 12

13 SSRMS Latching End Effector 13

14 Space Station RMS - Canadarm II 14
15 ISS Power Data Grapple Fixture 15
16 Special Purpose Dexterous Manipulator 16

17 Special Purpose Dexterous Manipulator 17

18 SPDM - Dextre 18

19 SPDM - Dextre 19

20 SPDM Orbital Tool Changeout Mechanism 20
21 European Robotic Arm 21
22 Japanese Exposed Facility Robotics 22
23 JEM Remote Manipulator System 23
24 JEM Small Fine Arm 24

25 DARPA Orbital Express 25

26 Orbital Express Demo Manipulator System 26

27 OE Docking System Design Requirements 27

28 OE Docking System Christiansen and Nilson, Docking Systems Mechanism Utilized on Orbital Express Program 39th Aerospace Mechanisms Symposium, May

29 OE Docking Sequence Christiansen and Nilson, Docking Systems Mechanism Utilized on Orbital Express Program 39th Aerospace Mechanisms Symposium, May

30 Orbital Express Demonstration Manipulator System MDA developed the Orbital Express Autonomous Robotic Manipulator System comprising the following space and ground elements: Small next generation Robotic arm on ASTRO with avionics and autonomous vision system Grapple fixtures and vision target for Free-Flyer Capture and ORU transfer Mating interface camera and lighting system Standard, non-proprietary ORU containers and mating interfaces Proximity-Ops lighting system Autonomous Software Robotic Ground Segment Length 3m Manipulator Arm Specifics Mass Volume Power 71kg 65cm x 49cm x 186cm 131 watts DOF 6

31 Free-Flyer Capture Robotic Arm on ASTRO will drive autonomously using highly-reliable vision feedback from a camera at its tip to capture NEXTSat Berthing requires the advanced robotic arm to grapple NEXTSat from a distance of 1.5 m and position it within the capture envelope

32 Robonaut 32

33 Robonaut Using Human Interfaces 33

34 RESTORE Dexterous Manipulator 34

35 RESTORE End Effector Interchange 35

36 RESTORE End Effector Interchange 36
 864-3108, john.t.dorsey@nasa.")
37 The Tendon-Actuated Lightweight In-Space MANipulator (TALISMAN): An Enabling Capability for In-Space Servicing Presented To: ATLAST Seminar Series John T. Dorsey NASA Langley Research Center November 18, 2015 John T. Dorsey, NASA Langley Research Center, (757) , 37
38 New Approach: Tendon Actuated Lightweight In-Space MANipulator (TALISMAN) Truss Link Hinge Joint Spreader Actuation Cables Motor/Gearbox What Is New In This Approach? Tendon and spreader architecture: high gear ratio and mechanical advantage, lightweight motor/gearboxes Tendon architecture: low joint compliance and mass Tension/compression structural elements: minimize structural mass Actuation tendons: also provide stiffening for the structure Lightweight joints: number can be optimized to increase dexterity and/or packaging efficiency Tendon actuation: full or semi antagonistic control options possible Design: modular and scalable making it versatile to many applications John T. Dorsey, NASA Langley Research Center, (757) , 38

 Number of joints in manipulator 6 (2 shoulder, 1 elbow, 3 wrist) 5 (2 base, 3 joints) Number of links in manipulator 2 4 Tube/Link System Mass [kg] 46 kg (101.")
39 TALISMAN vs. Shuttle Remote Manipulator System Shuttle Remote Manipulator Envelope Shuttle Remote Manipulator Composite Tube Diameter Design Parameter SRMS TALISMAN Total manipulator length 15.3 m (50 ft) 15.3 m (50 ft) Number of joints in manipulator 6 (2 shoulder, 1 elbow, 3 wrist) 5 (2 base, 3 joints) Number of links in manipulator 2 4 Tube/Link System Mass [kg] 46 kg (101.4 lbf) 7.03 kg (15.5 lbf) Manipulator Mass 410 kg (904 lbf) 36.1 kg (79.6 lbf) Packaged Volume 1.74 m 3 (61.4 ft 3 ) 0.23 m 3 (8 ft 3 ) Talisman compared to SRMS: < 1/10 th mass and < 1/7 th the volume (Talisman does not include an end-effector) John T. Dorsey, NASA Langley Research Center, (757) , john.t.dorsey@nasa.gov 39

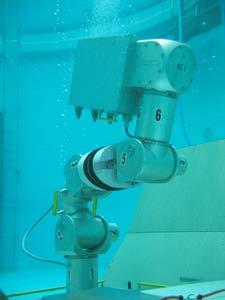
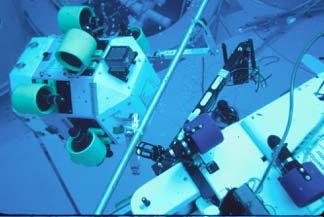
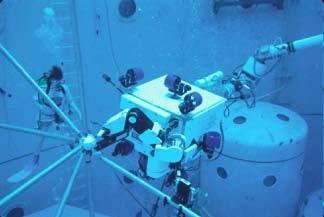
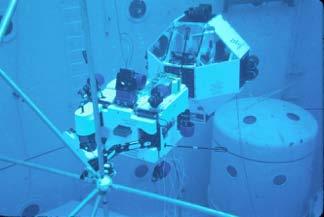
40 Ranger Telerobotic Flight Experiment 40

41 Ranger Telerobotic Shuttle Experiment 41
42 Ranger Flight Dexterous Arms 42
43 Dexterous Arm Parameters Modular arm with co-located electronics Embedded 386EX rad-tolerant processors Only power and 1553 data passed along arm 53 inch reach mounting plate-tool interface plate 8 DOF with two additional tool drives (10 actuators) Interchangeable end effector with secure tool exchange 30 pounds tip force, full extension 150 pounds (could be significantly reduced) 250 W (average 1G ops) 43

44 Ranger-SMEX-Lite Concept 44

45 Ranger on SMV 45





46 SM4R(obotic) Concept Overview Ranger Telerobotic Servicing System University of Maryland Interim Control Module Naval Research Laboratory HST SM4 Servicing Hardware NASA Goddard 46

47 Hubble Space Telescope Servicing 47
48 Results of Ranger Hubble Servicing Over four months of active project, Ranger performed all major servicing operations planned for SM-4 Significant performance impacts found in selected architecture MDA OTCM size makes operations in confined volumes difficult Manipulator and robot body sized preclude close access to most ORUs other than reaching in Insufficient time to fully implement compliant control in this configuration Most of the issues were mitigated in original Ranger servicing proposal 48




49 Ranger Spacecraft Servicing System 49

50 MODSS Concept 50 Miniature On-orbit Dexterous Servicing System Maintain essential capabilities of Ranger for dexterous servicing Human-compatible servicing tasks Interchangeable end effectors Free-flying spacecraft bus Shrink system to technological minimums (target: 100 kg total)



51 MODSS Dexterous Manipulator Concepts Modular Roll/Pitch/Arm Link with Embedded Controller Modular Actuator Design 51
52 Completed Pitch-Roll Module Prototype 52
 diameter 75 cm (30 in) length 53 N (12 lbf) tip force Modular actuator data 67 N-m (40 ft-lbf)")
 diameter 135 cm (53 in) length 133 N (30 lbf) force Elbow actuator data 81 N-m (60 ft-lbf) actuator")
53 Comparison to Ranger Technology 6-DOF dexterous arm 10 kg (22 lbm) arm mass 84 mm (3.3 in) diameter 75 cm (30 in) length 53 N (12 lbf) tip force Modular actuator data 67 N-m (40 ft-lbf) actuator torque 2.1 kg (4.6 lbm) module mass 10-DOF dexterous arm 77 kg (170 lbm) arm mass 135 mm (5.375 in) diameter 135 cm (53 in) length 133 N (30 lbf) force Elbow actuator data 81 N-m (60 ft-lbf) actuator torque 19.7 kg (43.3 lb) module mass 53
54 MODSS System Mass Estimates Component Mass (kg) Dexterous Manipulators 2x7 Grappling Arm 15 End Effectors 4x2 Pan/Tilt Unit 2 Power Systems 24 Avionics 6 Spacecraft Bus Structures 10 Propulsion System 5 Propellants 7 Margin 9 54

55 MODSS Servicing Milstar Spacecraft 55

56 Hubble Servicing Mission 5?? 56
57 Proteus Modular Interconnects Intermodule connections will be via androgynous interface mechanism (AIM) AIM allows removal, reversal, reinsertion of components via a second local manipulator AIM utility connections are main power & ground, control power & ground, IEEE 1394 command and data bus Specialized interchangeable end effector mechanism attached via AIM to allow arm to perform unaided tool changeouts 57
58 Self-reconfiguring Autonomous Software Dynamically deals with changes in number of degrees-of-freedom and/or configuration Dynamically deals with changes in end effector Capable of self-diagnosing faults Prevents acting upon erroneous or illegal command from within or outside (either teleoperator or another vehicle) the vehicle 58



59 A Sample Proteus Toolbox Modules End Effectors Nodes Roll Actuator Force-Torque Sensor Stereo Pan-Tilt Mini-Node Pitch Actuator Pitch-Yaw Actuator Pitch-Roll Actuator Long Link Medium Link Short Link 59
60 Docking and Berthing Docking: free-flight into a rigidizable connection Higher energy and misalignment Greater autonomy for visiting vehicle Always used for human vehicles Berthing: Grapple by a manipulator Moved into position for a rigid connection Higher operational overhead Greater precision and lower energy Generally used for system assembly 60

61 Apollo-Soyuz Docking Interface 61
62 Androgynous Peripheral Attach System 62

63 APAS Test Hardware (JSC) 63
64 Russian Probe-Drogue Docking System 64
65 International Docking System Face 65
66 IDS Side View 66
67 IDS Soft Capture Features 67
68 IDS Maximum Loads 68

69 Common Berthing Mechanism 69
70 Common Berthing Mechanism 70

71 Shuttle Mounting Systems 71
72 Shuttle Passive and Active Latches 72
73 Shuttle Trunnion Design 73
74 ISS Segment-Segment Attach System 74
75 Segment-Segment Capture Latches 75

76 Multiple Cooperative Telerobots 76
Development of Formation Flight and Docking Algorithms Using the SPHERES Testbed
 Development of Formation Flight and Docking Algorithms Using the Testbed Prof. David W. Miller MIT Allen Chen, Alvar Saenz-Otero, Mark Hilstad, David W. Miller Introduction : Synchronized Position Hold
Development of Formation Flight and Docking Algorithms Using the Testbed Prof. David W. Miller MIT Allen Chen, Alvar Saenz-Otero, Mark Hilstad, David W. Miller Introduction : Synchronized Position Hold
Overview of Proximity Operations Missions Relevant to NanoSats
 Overview of Proximity Operations Missions Relevant to NanoSats Scott MacGillivray, President Tyvak Nano-Satellite Systems LLC (714) 392-9095 scott@tyvak.com 18 April 2012 This document does not contain
Overview of Proximity Operations Missions Relevant to NanoSats Scott MacGillivray, President Tyvak Nano-Satellite Systems LLC (714) 392-9095 scott@tyvak.com 18 April 2012 This document does not contain
ACE Project Report. December 10, Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University
 ACE Project Report December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report covers the period from September 20, 2007 through December 10,
ACE Project Report December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report covers the period from September 20, 2007 through December 10,
Mission Overview Cal Poly s Design Current and future work
 Click to edit Master title style Table Click of to Contents edit Master title style Mission Overview Cal Poly s Design Current and future work 2 Mission Click to Overview edit Master title style Main Mission:
Click to edit Master title style Table Click of to Contents edit Master title style Mission Overview Cal Poly s Design Current and future work 2 Mission Click to Overview edit Master title style Main Mission:
Presentation Outline
 Presentation Outline Phd Activities during the three years mainly concentrated on the development and testing of the SPARTANS cooperating spacecraft hardware testbed Development of the Translation Module
Presentation Outline Phd Activities during the three years mainly concentrated on the development and testing of the SPARTANS cooperating spacecraft hardware testbed Development of the Translation Module
ADVANCED MOTION-FORCE CONTROLLER FOR SPACE ARMS: EXPERIMENTAL RESULTS WITH THE GROUND REFERENCE MODEL OF EUROPA MISSION
 ADVANCED MOTION-FORCE CONTROLLER FOR SPACE ARMS: EXPERIMENTAL RESULTS WITH THE GROUND REFERENCE MODEL OF EUROPA MISSION INTRODUCTION A. Terribile ( 1 ), M. Favaretto ( 1 ), M. Filippini ( 1 ), T. Grasso
ADVANCED MOTION-FORCE CONTROLLER FOR SPACE ARMS: EXPERIMENTAL RESULTS WITH THE GROUND REFERENCE MODEL OF EUROPA MISSION INTRODUCTION A. Terribile ( 1 ), M. Favaretto ( 1 ), M. Filippini ( 1 ), T. Grasso
JEMRMS Design Features and Topics from Testing
 Proceeding of the 6 th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-sairas 2001, Canadian Space Agency, St-Hubert, Quebec, Canada, June 18-22, 2001. JEMRMS Design
Proceeding of the 6 th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-sairas 2001, Canadian Space Agency, St-Hubert, Quebec, Canada, June 18-22, 2001. JEMRMS Design
Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
DARPA Investments in GEO Robotics
 DARPA Investments in GEO Robotics Carl Glen Henshaw, Ph.D. Signe Redfield, Ph.D. Naval Center for Space Technology U.S. Naval Research Laboratory Washington, DC 20375 May 22, 2015 Introduction Program
DARPA Investments in GEO Robotics Carl Glen Henshaw, Ph.D. Signe Redfield, Ph.D. Naval Center for Space Technology U.S. Naval Research Laboratory Washington, DC 20375 May 22, 2015 Introduction Program
Current Status of the European Robotic Arm (ERA), its Launch on the Russian Multi-purpose Laboratory Module (MLM) and its Operation on the ISS
, its Launch on the Russian Multi-purpose Laboratory Module (MLM) and its Operation on the ISS") In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Current Status of the European Robotic
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Current Status of the European Robotic
Reconfiguration Methods for On-orbit Servicing, Assembly, and Operations with Application to Space Telescopes. Swati Mohan
 Reconfiguration Methods for On-orbit Servicing, Assembly, and Operations with Application to Space Telescopes by Swati Mohan Submitted to the Department of Aeronautics and Astronautics in partial fulfillment
Reconfiguration Methods for On-orbit Servicing, Assembly, and Operations with Application to Space Telescopes by Swati Mohan Submitted to the Department of Aeronautics and Astronautics in partial fulfillment
Mechanism Analysis and Verification Approach for ISS Truss Assembly
 Mechanism Analysis and Verification Approach for ISS Truss Assembly Wesley Bruner *, Carlos Enriquez* and Sreekumar Thampi* Abstract Analysis and verification of an International Space Station (ISS) element
Mechanism Analysis and Verification Approach for ISS Truss Assembly Wesley Bruner *, Carlos Enriquez* and Sreekumar Thampi* Abstract Analysis and verification of an International Space Station (ISS) element
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Responsive Flight Software Development & Verification Techniques for Small Satellites
 Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview
Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview
Fly Me To The Moon. Langley s Lunar Surface Manipulation System (LSMS)
") Fly Me To The Moon Manned Or Not, This Lunar Project Has A Prototype When NASA Langley Research Center hired Honeybee Robotics Spacecraft Mechanisms Corporation to develop a totally mechanical tool changer,
Fly Me To The Moon Manned Or Not, This Lunar Project Has A Prototype When NASA Langley Research Center hired Honeybee Robotics Spacecraft Mechanisms Corporation to develop a totally mechanical tool changer,
Dexterous Manipulators and Advanced Control Systems
 Dexterous Manipulators and Advanced Control Systems Robotics Research Corporation is a worldwide supplier of advanced technology robotic manipulators and control products. RRC offers a line of highly dexterous,
Dexterous Manipulators and Advanced Control Systems Robotics Research Corporation is a worldwide supplier of advanced technology robotic manipulators and control products. RRC offers a line of highly dexterous,
DARPA Perspective on Space
 DARPA Perspective on Space Ms. Pamela A. Melroy, Deputy Director DARPA Tactical Technology Office Briefing prepared for International Symposium for Personal and Commercial Spaceflight (ISPCS) 2015 October
DARPA Perspective on Space Ms. Pamela A. Melroy, Deputy Director DARPA Tactical Technology Office Briefing prepared for International Symposium for Personal and Commercial Spaceflight (ISPCS) 2015 October
H2020 Space Robotic SRC- OG4
 H2020 Space Robotic SRC- OG4 2 nd PERASPERA workshop Presentation by Sabrina Andiappane Thales Alenia Space France This project has received funding from the European Union s Horizon 2020 research and
H2020 Space Robotic SRC- OG4 2 nd PERASPERA workshop Presentation by Sabrina Andiappane Thales Alenia Space France This project has received funding from the European Union s Horizon 2020 research and
International External Robotic Interoperability Standards (IERIS) Draft C February 2018
 Draft C February 2018") International External Robotic Interoperability Standards (IERIS) Draft C Verify this is the current version before use REVISION AND HISTORY REV. DESCRIPTION PUB. DATE Draft Draft Release 04-18-17 Draft
International External Robotic Interoperability Standards (IERIS) Draft C Verify this is the current version before use REVISION AND HISTORY REV. DESCRIPTION PUB. DATE Draft Draft Release 04-18-17 Draft
Mobile Servicing System to User (Generic) Interface Control Document Part 2 International Space Station Program
 Interface Control Document Part 2 International Space Station Program") , Revision A Mobile Servicing System to User (Generic) Interface Control Document Part 2 International Space Station Program Revision A, Type 1 Approved by NASA National Aeronautics and Space Administration
, Revision A Mobile Servicing System to User (Generic) Interface Control Document Part 2 International Space Station Program Revision A, Type 1 Approved by NASA National Aeronautics and Space Administration
Module 1 : Introduction to robotics. Lecture 3 : Industrial Manipulators & AGVs. Objectives. History of robots : Main bodies and wrists
 Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Smartphone Video Guidance Sensor for Small Satellites
 SSC13-I-7 Smartphone Video Guidance Sensor for Small Satellites Christopher Becker, Richard Howard, John Rakoczy NASA Marshall Space Flight Center Mail Stop EV42, Huntsville, AL 35812; 256-544-0114 christophermbecker@nasagov
SSC13-I-7 Smartphone Video Guidance Sensor for Small Satellites Christopher Becker, Richard Howard, John Rakoczy NASA Marshall Space Flight Center Mail Stop EV42, Huntsville, AL 35812; 256-544-0114 christophermbecker@nasagov
Space Tele-Robotics. Alexander Nawrocki
 Space Tele-Robotics by Alexander Nawrocki Dissertation Submitted In Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy in Engineering California Coast University 2003 2003
Space Tele-Robotics by Alexander Nawrocki Dissertation Submitted In Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy in Engineering California Coast University 2003 2003
JEM Internal Ball Camera (Int-Ball)
") JEM Internal Ball Camera (Int-Ball) July 14, 2017 Japan Aerospace Exploration Agency 1 Objective of Project Currently, when working in the Japanese Experiment Module ( Kibo ), the crew (astronaut) often
JEM Internal Ball Camera (Int-Ball) July 14, 2017 Japan Aerospace Exploration Agency 1 Objective of Project Currently, when working in the Japanese Experiment Module ( Kibo ), the crew (astronaut) often
Attitude Control for Small Satellites using Control Moment Gyros
 Attitude Control for Small Satellites using Control Moment Gyros V Lappas a, Dr WH Steyn b, Dr CI Underwood c a Graduate Student, University of Surrey, Guildford, Surrey GU 5XH, UK b Professor, University
Attitude Control for Small Satellites using Control Moment Gyros V Lappas a, Dr WH Steyn b, Dr CI Underwood c a Graduate Student, University of Surrey, Guildford, Surrey GU 5XH, UK b Professor, University
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics properties and performance measures @ 25 Redundancy first definition McKerrow When a manipulator can reach a specified position with more
Dipartimento di Elettronica Informazione e Bioingegneria Robotics properties and performance measures @ 25 Redundancy first definition McKerrow When a manipulator can reach a specified position with more
Final Grant Report Grant/Contract Number: NNJ04HI11A
 Final Grant Report Grant/Contract Number: NNJ04HI11A Augmented Reality, Path Planning, and Physically-based Modeling for Remote Robotic Operations Abhilash Pandya (PI), Keshav Chintamani, R. Darin Ellis,
Final Grant Report Grant/Contract Number: NNJ04HI11A Augmented Reality, Path Planning, and Physically-based Modeling for Remote Robotic Operations Abhilash Pandya (PI), Keshav Chintamani, R. Darin Ellis,
CERBERUS: Prototype for an Agile Inspection and Servicing Satellite Using Thrust-Vectoring Cold-Gas Propulsion
 AIAA SPACE Forum 12-14 Sep 2017, Orlando, FL AIAA SPACE and Astronautics Forum and Exposition AIAA 2017-5116 CERBERUS: Prototype for an Agile Inspection and Servicing Satellite Using Thrust-Vectoring Cold-Gas
AIAA SPACE Forum 12-14 Sep 2017, Orlando, FL AIAA SPACE and Astronautics Forum and Exposition AIAA 2017-5116 CERBERUS: Prototype for an Agile Inspection and Servicing Satellite Using Thrust-Vectoring Cold-Gas
Proceedings of the 2013 SpaceVision Conference November 7-10 th, Tempe, AZ, USA ABSTRACT
 Proceedings of the 2013 SpaceVision Conference November 7-10 th, Tempe, AZ, USA Development of arm controller for robotic satellite servicing demonstrations Kristina Monakhova University at Buffalo, the
Proceedings of the 2013 SpaceVision Conference November 7-10 th, Tempe, AZ, USA Development of arm controller for robotic satellite servicing demonstrations Kristina Monakhova University at Buffalo, the
Camera gimbal control system for unmanned platforms
 8 th International Symposium Topical Problems in the Field of Electrical and Power Engineering Pärnu, Estonia, January 11-16, 2010 Camera gimbal control system for unmanned platforms Kristjan Tiimus, Mart
8 th International Symposium Topical Problems in the Field of Electrical and Power Engineering Pärnu, Estonia, January 11-16, 2010 Camera gimbal control system for unmanned platforms Kristjan Tiimus, Mart
On-ground experimental verification of a torque controlled free-floating robot
 On-ground experimental verification of a torque controlled free-floating robot Marco De Stefano, Jordi Artigas, Alessandro M. Giordano, Roberto Lampariello and Alin-Albu Schaeffer Institute of Robotics
On-ground experimental verification of a torque controlled free-floating robot Marco De Stefano, Jordi Artigas, Alessandro M. Giordano, Roberto Lampariello and Alin-Albu Schaeffer Institute of Robotics
Quantitative Selection and Design of Model Generation Architectures for On-Orbit Autonomous Assembly
 Quantitative Selection and Design of Model Generation Architectures for On-Orbit Autonomous Assembly Swati Mohan, David W. Miller March 2010 SSL # 3-10 Quantitative Selection and Design of Model Generation
Quantitative Selection and Design of Model Generation Architectures for On-Orbit Autonomous Assembly Swati Mohan, David W. Miller March 2010 SSL # 3-10 Quantitative Selection and Design of Model Generation
International Docking System Standard (IDSS) Interface Definition Document (IDD)
 Interface Definition Document (IDD)") International Docking System Standard (IDSS) Interface Definition Document (IDD) Revision C This page intentionally left blank. IDSS IDD Revision C Concurrence iii This page intentionally left blank. iv
International Docking System Standard (IDSS) Interface Definition Document (IDD) Revision C This page intentionally left blank. IDSS IDD Revision C Concurrence iii This page intentionally left blank. iv
MOBILE ROBOTIC SYSTEM FOR GROUND-TESTING OF MULTI-SPACECRAFT PROXIMITY OPERATIONS
 MOBILE ROBOTIC SYSTEM FOR GROUND-TESTING OF MULTI-SPACECRAFT PROXIMITY OPERATIONS INTRODUCTION James Doebbler, Jeremy Davis, John Valasek, John Junkins Texas A&M University, College Station, TX 77843 Ground
MOBILE ROBOTIC SYSTEM FOR GROUND-TESTING OF MULTI-SPACECRAFT PROXIMITY OPERATIONS INTRODUCTION James Doebbler, Jeremy Davis, John Valasek, John Junkins Texas A&M University, College Station, TX 77843 Ground
Ceilbot vision and mapping system
 Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Video-based system for satellite proximity operations
 7th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2002' Video-based system for satellite proximity operations Piotr Jasiobedzki(1), Michael Greenspan(2), Gerhard Roth(3),
7th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2002' Video-based system for satellite proximity operations Piotr Jasiobedzki(1), Michael Greenspan(2), Gerhard Roth(3),
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
United States Control Module Guidance, Navigation, and Control Subsystem Design Concept
 NASA Technical Paper 3677 United States Control Module Guidance, Navigation, and Control Subsystem Design Concept M.E. Polites and B.E. Bartlow Marshall Space Flight Center MSFC, Alabama National Aeronautics
NASA Technical Paper 3677 United States Control Module Guidance, Navigation, and Control Subsystem Design Concept M.E. Polites and B.E. Bartlow Marshall Space Flight Center MSFC, Alabama National Aeronautics
SPHERES. Maturation of Autonomous Rendezvous & Docking Algorithms with SPHERES aboard the ISS. Alvar Saenz-Otero MIT SPHERES Lead Scientist
 Maturation of Autonomous Rendezvous & Docking Algorithms with aboard the ISS Alvar Saenz-Otero MIT Lead Scientist ICRA 2012 Satellite Servicing Workshop 2012/04/13 What is? A Facility of the ISS National
Maturation of Autonomous Rendezvous & Docking Algorithms with aboard the ISS Alvar Saenz-Otero MIT Lead Scientist ICRA 2012 Satellite Servicing Workshop 2012/04/13 What is? A Facility of the ISS National
ROBOT TEAMS CH 12. Experiments with Cooperative Aerial-Ground Robots
 ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
PRELIMARY REQUIREMENT SPECIFICATION FOR A UNIVERSAL SPACE INTERFACE STANDARD
 PRELIMARY REQUIREMENT SPECIFICATION FOR A UNIVERSAL SPACE INTERFACE STANDARD 1 REQUIREMENT SPECIFICATION FOR A UNIVERSAL SPACE INTERFACE STANDARD Written Mark Hempsell Date 28 April 2014 Issue Draft Fa
PRELIMARY REQUIREMENT SPECIFICATION FOR A UNIVERSAL SPACE INTERFACE STANDARD 1 REQUIREMENT SPECIFICATION FOR A UNIVERSAL SPACE INTERFACE STANDARD Written Mark Hempsell Date 28 April 2014 Issue Draft Fa
Ch 8 Industrial Robotics
 Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017
 Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
FABRICATION OF A 5 D.O.F ROBOT ARM CONTROLLED BY HAPTIC TECHNOLOGY
 FABRICATION OF A 5 D.O.F ROBOT ARM CONTROLLED BY HAPTIC TECHNOLOGY 1 NITHIN RAJAN, 2 V.MANOJ KUMAR 1 Graduate Student, 2 Ass. Professor SRM University E-mail: Nitz.719@gmail.com, vmanojkumar19@gmail Abstract-
FABRICATION OF A 5 D.O.F ROBOT ARM CONTROLLED BY HAPTIC TECHNOLOGY 1 NITHIN RAJAN, 2 V.MANOJ KUMAR 1 Graduate Student, 2 Ass. Professor SRM University E-mail: Nitz.719@gmail.com, vmanojkumar19@gmail Abstract-
Example of Technology Development Program
 Example of Technology Development Program SSTDM 2014 IISC, Bangalore, India April 1, 2014 Dr. Marco Villa CANEUS Small Satellites Director Tyvak VP Space Vehicle Systems Ground rules Power and Volume are
Example of Technology Development Program SSTDM 2014 IISC, Bangalore, India April 1, 2014 Dr. Marco Villa CANEUS Small Satellites Director Tyvak VP Space Vehicle Systems Ground rules Power and Volume are
Project and Diploma Thesis Topics in DAAS
 Intermediate Project (P) Engineering Diploma Thesis (E) Master Diploma Thesis (M) Project and Diploma Thesis Topics in DAAS - 2018 Prof Janusz Narkiewicz Below there are areas of topics to be clarified
Intermediate Project (P) Engineering Diploma Thesis (E) Master Diploma Thesis (M) Project and Diploma Thesis Topics in DAAS - 2018 Prof Janusz Narkiewicz Below there are areas of topics to be clarified
MIDN Dakota Wenberg, USN
 DEMONSTRATING AUTONOMOUS SPACECRAFT ASSEMBLY WITH THE INTELLIGENT SPACE ASSEMBLY ROBOT MIDN Dakota Wenberg, USN United States Naval Academy, m196804@usna.edu MIDN Christopher Wellins, USN; MIDN Alex Hardy,
DEMONSTRATING AUTONOMOUS SPACECRAFT ASSEMBLY WITH THE INTELLIGENT SPACE ASSEMBLY ROBOT MIDN Dakota Wenberg, USN United States Naval Academy, m196804@usna.edu MIDN Christopher Wellins, USN; MIDN Alex Hardy,
Baseline Tests of an Autonomous Telerobotic System for Assembly of Space Truss Structures
 NASA Technical Paper 3448 Baseline Tests of an Autonomous Telerobotic System for Assembly of Space Truss Structures Marvin D. Rhodes, Ralph W. Will, and Coung Quach July 1994 NASA Technical Paper 3448
NASA Technical Paper 3448 Baseline Tests of an Autonomous Telerobotic System for Assembly of Space Truss Structures Marvin D. Rhodes, Ralph W. Will, and Coung Quach July 1994 NASA Technical Paper 3448
ERA PERFORMANCE MEASUREMENTS TEST RESULTS
 ERA PERFORMANCE MEASUREMENTS TEST RESULTS P. Verzijden, AIT Manager H. Petersen, System Engineer M. Visser, Control Engineer Dutch Space BV, P.O. Box 32070, 2303 DB LEIDEN, The Netherlands phone: ++31
ERA PERFORMANCE MEASUREMENTS TEST RESULTS P. Verzijden, AIT Manager H. Petersen, System Engineer M. Visser, Control Engineer Dutch Space BV, P.O. Box 32070, 2303 DB LEIDEN, The Netherlands phone: ++31
Shadow Dexterous Hand C5 Technical Specification
 Shadow Dexterous Hand C5 Technical Specification Current release: 14 th May '08 Shadow Dextrous Hand - Technical Specification Page 2/10 1 Overview...3 2 Mechanical Profile...3 2.1 Dimensions...3 Table
Shadow Dexterous Hand C5 Technical Specification Current release: 14 th May '08 Shadow Dextrous Hand - Technical Specification Page 2/10 1 Overview...3 2 Mechanical Profile...3 2.1 Dimensions...3 Table
Engineering Graphics. Presentation graphics Levels of hardware visualization. Visual presentation of data. Sketching Drawing Drafting Solid modeling
 Presentation graphics Levels of hardware visualization Sketching Drawing Drafting Solid modeling Visual presentation of data Presentation Graphics Always use landscape, not portrait layout Better fit to
Presentation graphics Levels of hardware visualization Sketching Drawing Drafting Solid modeling Visual presentation of data Presentation Graphics Always use landscape, not portrait layout Better fit to
On-Orbit Testing of Target-less TriDAR 3D Rendezvous and Docking Sensor
 On-Orbit Testing of Target-less TriDAR 3D Rendezvous and Docking Sensor Stephane Ruel, Tim Luu, Andrew Berube* *Neptec Design Group, Canada e-mail: sruel@neptec.com Abstract TriDAR is a vision system developed
On-Orbit Testing of Target-less TriDAR 3D Rendezvous and Docking Sensor Stephane Ruel, Tim Luu, Andrew Berube* *Neptec Design Group, Canada e-mail: sruel@neptec.com Abstract TriDAR is a vision system developed
Robot Control. Robotics. Robot Control. Vladimír Smutný
 Robot Control Robotics Robot Control Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University in Prague Kinematic Model
Robot Control Robotics Robot Control Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University in Prague Kinematic Model
 Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS
 DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS Karol Seweryn 1, Marek Banaszkiewicz 1, Bernd Maediger 2, Tomasz Rybus 1, Josef Sommer 2 1 Space Research Centre of the Polish
DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS Karol Seweryn 1, Marek Banaszkiewicz 1, Bernd Maediger 2, Tomasz Rybus 1, Josef Sommer 2 1 Space Research Centre of the Polish
Automated Task-Based Synthesis and Optimization of Field Robots
 Automated Task-Based Synthesis and Optimization of Field Robots Chris Leger The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 email: blah@cmu.edu phone: (412) 268-8157
Automated Task-Based Synthesis and Optimization of Field Robots Chris Leger The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 email: blah@cmu.edu phone: (412) 268-8157
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
Advanced Camcorder Support System
 Balanced and stable shooting platform Reduces fatigue on long shoots Camera feels weightless, control is effortless Allows a wide range of professional shooting techniques Advanced Camcorder Support System
Balanced and stable shooting platform Reduces fatigue on long shoots Camera feels weightless, control is effortless Allows a wide range of professional shooting techniques Advanced Camcorder Support System
SICON Smart Sensors Role in Integrated System Health Management
 SICON 2005 Smart Sensors Role in Integrated System Health Management Jose M Perotti, Instrumentation Group Lead Command, Monitoring and Control Branch Spaceport Engineering &Technology Directorate, Kennedy
SICON 2005 Smart Sensors Role in Integrated System Health Management Jose M Perotti, Instrumentation Group Lead Command, Monitoring and Control Branch Spaceport Engineering &Technology Directorate, Kennedy
OHB System AG International Conference on Space Optics ICSO 2016 Prepared by Raffello MIGLIORE Date , Biarritz.
 International Conference on Space Optics ICSO 2016 Prepared by Raffello MIGLIORE Date 19.10.2016, Biarritz Outlook on EDRS-C EDRS-C / European Data Relay System EDRS-C, designed and developed by OHB System,
International Conference on Space Optics ICSO 2016 Prepared by Raffello MIGLIORE Date 19.10.2016, Biarritz Outlook on EDRS-C EDRS-C / European Data Relay System EDRS-C, designed and developed by OHB System,
Mechanical structure of a robot=skeleton of human body Study of structure of a robot=physical structure of the manipulator structure
 UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
INITIAL SPHERES OPERATIONS ABOARD THE INTERNATIONAL SPACE STATION
 INITIAL SPHERES OPERATIONS ABOARD THE INTERNATIONAL SPACE STATION Alvar Saenz-Otero, David W. Miller MIT Space Systems Laboratory Cambridge, MA, 02139 USA +1 617 324 6827, alvarso@mit.edu ABSTRACT The
INITIAL SPHERES OPERATIONS ABOARD THE INTERNATIONAL SPACE STATION Alvar Saenz-Otero, David W. Miller MIT Space Systems Laboratory Cambridge, MA, 02139 USA +1 617 324 6827, alvarso@mit.edu ABSTRACT The
Application of planar air-bearing microgravity simulator for experiments related to ADR missions
 Application of planar air-bearing microgravity simulator for experiments related to ADR missions Tomasz Rybus, Karol Seweryn, Jakub Oleś, Piotr Osica, Katarzyna Ososińska Space Research Centre of the Polish
Application of planar air-bearing microgravity simulator for experiments related to ADR missions Tomasz Rybus, Karol Seweryn, Jakub Oleś, Piotr Osica, Katarzyna Ososińska Space Research Centre of the Polish
DEVELOPMENT OF TELE-ROBOTIC INTERFACE SYSTEM FOR THE HOT-LINE MAINTENANCE. Chang-Hyun Kim, Min-Soeng Kim, Ju-Jang Lee,1
 DEVELOPMENT OF TELE-ROBOTIC INTERFACE SYSTEM FOR THE HOT-LINE MAINTENANCE Chang-Hyun Kim, Min-Soeng Kim, Ju-Jang Lee,1 Dept. of Electrical Engineering and Computer Science Korea Advanced Institute of Science
DEVELOPMENT OF TELE-ROBOTIC INTERFACE SYSTEM FOR THE HOT-LINE MAINTENANCE Chang-Hyun Kim, Min-Soeng Kim, Ju-Jang Lee,1 Dept. of Electrical Engineering and Computer Science Korea Advanced Institute of Science
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Project: UAV Payload Retract Mechanism. Company Background. Introduction
 Ascent Vision Technologies LLC 90 Aviation Lane Belgrade, MT 59714 Tel 406.388.2092 Fax 406.388.8133 www.ascentvision.com Project: UAV Payload Retract Mechanism Company Background Ascent Vision Technologies
Ascent Vision Technologies LLC 90 Aviation Lane Belgrade, MT 59714 Tel 406.388.2092 Fax 406.388.8133 www.ascentvision.com Project: UAV Payload Retract Mechanism Company Background Ascent Vision Technologies
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Dynamic Emulation of Space Robot in One-g Environment using Hardware-in-the-Loop Simulation
 7th ESA Workshop on Advanced Space Technologies for ics and Automation 'ASTRA 22' ESTEC, Noordwijk, The Netherlands, November 19-21, 22 Dynamic Emulation of Space in One-g Environment using Hardware-in-the-Loop
7th ESA Workshop on Advanced Space Technologies for ics and Automation 'ASTRA 22' ESTEC, Noordwijk, The Netherlands, November 19-21, 22 Dynamic Emulation of Space in One-g Environment using Hardware-in-the-Loop
Security, Monitoring, and Control of the Re-engineered Hubble Space Telescope Control Center System
 Security, Monitoring, and Control of the Re-engineered Hubble Space Telescope Control Center System Caleb Principe, NASA Goddard Space Flight Center Larry Barrett, Orbital Sciences Corporation Thomas Buchanan,
Security, Monitoring, and Control of the Re-engineered Hubble Space Telescope Control Center System Caleb Principe, NASA Goddard Space Flight Center Larry Barrett, Orbital Sciences Corporation Thomas Buchanan,
Space Robotics. Ioannis Rekleitis
 Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
Rapid Development of Robotic Applications using Component-Based Real-Time Software
 To appear in Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 95), Pittsburgh, PA, August 1995. Rapid Development of Robotic Applications using Component-Based Real-Time
To appear in Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 95), Pittsburgh, PA, August 1995. Rapid Development of Robotic Applications using Component-Based Real-Time
TEST BENCH FOR SPACE REMOTE DOCKING SYSTEM
 TEST BENCH FOR SPACE REMOTE DOCKING SYSTEM A. Pisla 1, C. Vaida 2, F. Covaciu 1 1 Departament of Engineering Design and Robotics, Technical University of Cluj- Napoca, Romania, e-mail: adip@mail.utcluj.ro;
TEST BENCH FOR SPACE REMOTE DOCKING SYSTEM A. Pisla 1, C. Vaida 2, F. Covaciu 1 1 Departament of Engineering Design and Robotics, Technical University of Cluj- Napoca, Romania, e-mail: adip@mail.utcluj.ro;
THE DEOS AUTOMATION AND ROBOTICS PAYLOAD ESA/ESTEC, NOORDWIJK, THE NETHERLANDS / APRIL 2011
 THE DEOS AUTOMATION AND ROBOTICS PAYLOAD ESA/ESTEC, NOORDWIJK, THE NETHERLANDS / 12 14 APRIL 2011 P. Rank (1), Q. Mühlbauer (1), W. Naumann (2), K. Landzettel (3) (1) Kayser-Threde, Munich, Germany, Email:
THE DEOS AUTOMATION AND ROBOTICS PAYLOAD ESA/ESTEC, NOORDWIJK, THE NETHERLANDS / 12 14 APRIL 2011 P. Rank (1), Q. Mühlbauer (1), W. Naumann (2), K. Landzettel (3) (1) Kayser-Threde, Munich, Germany, Email:
A modular approach to system integration in underwater robotics
 A modular approach to system integration in underwater robotics Tomislav Lugarić, Đula Nađ and Zoran Vukić University of Zagreb, Faculty of Electrical Engineering and Computing, Zagreb, Croatia Abstract
A modular approach to system integration in underwater robotics Tomislav Lugarić, Đula Nađ and Zoran Vukić University of Zagreb, Faculty of Electrical Engineering and Computing, Zagreb, Croatia Abstract
SmartSSR DTN Router. Alan Mick David Edell Workshop on Spacecraft Flight Software FSW-10, 12/8/2010 NOT SUBJECT TO EXPORT (ITAR) CONTROL
 CONTROL") SmartSSR DTN Router 2010 Workshop on Spacecraft Flight Software FSW-10, 12/8/2010 NOT SUBJECT TO EXPORT (ITAR) CONTROL Alan Mick David Edell Alan.Mick@jhuapl.edu David.Edell@jhuapl.edu V02, 11/29/2010
SmartSSR DTN Router 2010 Workshop on Spacecraft Flight Software FSW-10, 12/8/2010 NOT SUBJECT TO EXPORT (ITAR) CONTROL Alan Mick David Edell Alan.Mick@jhuapl.edu David.Edell@jhuapl.edu V02, 11/29/2010
Rapid Assembly of Spacecraft Structures for Responsive Space
 Rapid Assembly of Spacecraft Structures for Responsive Space Honeybee Robotics Spacecraft Mechanisms Corporation Speaker: Ron Hayes, Chief Engineer Sadick, S. et al. Honeybee Robotics Client Focus Teamwork
Rapid Assembly of Spacecraft Structures for Responsive Space Honeybee Robotics Spacecraft Mechanisms Corporation Speaker: Ron Hayes, Chief Engineer Sadick, S. et al. Honeybee Robotics Client Focus Teamwork
Advanced Reconstruction Techniques Applied to an On-Site CT System
 2nd International Symposium on NDT in Aerospace 2010 - We.1.A.4 Advanced Reconstruction Techniques Applied to an On-Site CT System Jonathan HESS, Markus EBERHORN, Markus HOFMANN, Maik LUXA Fraunhofer Development
2nd International Symposium on NDT in Aerospace 2010 - We.1.A.4 Advanced Reconstruction Techniques Applied to an On-Site CT System Jonathan HESS, Markus EBERHORN, Markus HOFMANN, Maik LUXA Fraunhofer Development
Application-Oriented Development of Parallel Kinematic Manipulators with Large Workspace
 Application-Oriented Development of Parallel Kinematic Manipulators with Large Workspace T. Brogårdh, S. Hanssen, ABB Automation Technologies, Robotics,Västerås, Sweden G. Hovland, The University of Queensland
Application-Oriented Development of Parallel Kinematic Manipulators with Large Workspace T. Brogårdh, S. Hanssen, ABB Automation Technologies, Robotics,Västerås, Sweden G. Hovland, The University of Queensland
Magnetic probe holders are fully adjustable for more DUT heights and probe styles
 Data Sheet The W4.0 x L6.5 mini probe station is a manual probe station designed for a versatile and comfortable operation on up to 4.0 wafers or 4.0 x 6.5 printed circuit board assemblies. This mini probe
Data Sheet The W4.0 x L6.5 mini probe station is a manual probe station designed for a versatile and comfortable operation on up to 4.0 wafers or 4.0 x 6.5 printed circuit board assemblies. This mini probe
Mobile Robotic System for Ground Testing of Multi- Spacecraft Proximity Operations
 AIAA Modeling and Simulation Technologies Conference and Exhibit 18-21 August 2008, Honolulu, Hawaii AIAA 2008-6548 Mobile Robotic System for Ground Testing of Multi- Spacecraft Proximity Operations James
AIAA Modeling and Simulation Technologies Conference and Exhibit 18-21 August 2008, Honolulu, Hawaii AIAA 2008-6548 Mobile Robotic System for Ground Testing of Multi- Spacecraft Proximity Operations James
Development of an Incremental and Iterative Risk Reduction Facility for Robotic Servicing and Assembly Missions
 Development of an Incremental and Iterative Risk Reduction Facility for Robotic Servicing and Assembly Missions David Charles Sternberg, Prof. David Miller and Dr. Alvar Saenz-Otero June 2014 SSL # 2-14
Development of an Incremental and Iterative Risk Reduction Facility for Robotic Servicing and Assembly Missions David Charles Sternberg, Prof. David Miller and Dr. Alvar Saenz-Otero June 2014 SSL # 2-14
Total and Spectral solar Irradiance Sensor (TSIS-1) Project Overview
 Project Overview") November 12, 2015 TSIS-1 Project Overview 1 Total and Spectral solar Irradiance Sensor (TSIS-1) Project Overview 2015 Sun-Climate Symposium Project Manager: Candace Carlisle Deputy Project Manager / Resources:
November 12, 2015 TSIS-1 Project Overview 1 Total and Spectral solar Irradiance Sensor (TSIS-1) Project Overview 2015 Sun-Climate Symposium Project Manager: Candace Carlisle Deputy Project Manager / Resources:
Plug and Play - Technologies for Robotic Operations
 Plug and Play - Technologies for Robotic Operations Paul Steele 03/04/2015 Issue/Revision: 1.0 Reference: Status: Issued METERON = Multi-Purpose End-To-End Robotic Operations Network Reference scenario
Plug and Play - Technologies for Robotic Operations Paul Steele 03/04/2015 Issue/Revision: 1.0 Reference: Status: Issued METERON = Multi-Purpose End-To-End Robotic Operations Network Reference scenario
THE DYNAMIC ANALYSIS OF FLEXIBILITY IN MOBILE ROBOTIC MANIPULATOR SYSTEMS
 Proc. VIII World Congress on the Theroy of Machines and Mechanisms, Prague, Czechoslavakia, July 1991- Revised 1/1/9 THE DYNAMIC ANALYSIS OF FLEXIBILITY IN MOBILE ROBOTIC MANIPULATOR SYSTEMS S. Dubowsky
Proc. VIII World Congress on the Theroy of Machines and Mechanisms, Prague, Czechoslavakia, July 1991- Revised 1/1/9 THE DYNAMIC ANALYSIS OF FLEXIBILITY IN MOBILE ROBOTIC MANIPULATOR SYSTEMS S. Dubowsky
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms
 Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
Plug and Play Small Satellite Solutions with Large Satellite Implications
 USU Small Satellite Conference 2008 SSC08-III-8 Plug and Play Small Satellite Solutions with Large Satellite Implications Lee Thienel Guy Robinson Dale Stottlemyer Rus Burgess Libration Systems Management,
USU Small Satellite Conference 2008 SSC08-III-8 Plug and Play Small Satellite Solutions with Large Satellite Implications Lee Thienel Guy Robinson Dale Stottlemyer Rus Burgess Libration Systems Management,
Experimental Validation of Physics-Based Planning and Control Algorithms for Planetary Robotic Rovers
 International Symposium on Experimental Robotics ISER 99 Experimental Validation of Physics-Based Planning and Control Algorithms for Planetary Robotic Rovers Karl Iagnemma Robert Burn Eric Wilhelm Steven
International Symposium on Experimental Robotics ISER 99 Experimental Validation of Physics-Based Planning and Control Algorithms for Planetary Robotic Rovers Karl Iagnemma Robert Burn Eric Wilhelm Steven
A Strain Free Lock and Release Mechanism for an Elastically Suspended Two-Axis Gimbal
 A Strain Free Lock and Release Mechanism for an Elastically Suspended Two-Axis Gimbal Armond Asadurian Moog Inc., Chatsworth Operations, 21339 Nordhoff Street, Chatsworth, CA 91311 Tel: 001-818-341-5156
A Strain Free Lock and Release Mechanism for an Elastically Suspended Two-Axis Gimbal Armond Asadurian Moog Inc., Chatsworth Operations, 21339 Nordhoff Street, Chatsworth, CA 91311 Tel: 001-818-341-5156
Robust Control Design. for the VEGA Launch Vehicle. during atmospheric flight
 Robust Control Design for the VEGA Launch Vehicle during atmospheric flight Diego Navarro-Tapia Andrés Marcos www.tasc-group.com Technology for AeroSpace Control (TASC) Aerospace Engineering Department
Robust Control Design for the VEGA Launch Vehicle during atmospheric flight Diego Navarro-Tapia Andrés Marcos www.tasc-group.com Technology for AeroSpace Control (TASC) Aerospace Engineering Department
A Cryogenic Heat Transport System for Space-Borne Gimbaled Instruments
 A Cryogenic Heat Transport System for Space-Borne Gimbaled Instruments M.V. Zagarola 1, J.K. Sanders 1, and C.S. Kirkconnell 2 1 Creare Inc., Hanover, NH 2 Raytheon Space & Airborne Systems, El Segundo,
A Cryogenic Heat Transport System for Space-Borne Gimbaled Instruments M.V. Zagarola 1, J.K. Sanders 1, and C.S. Kirkconnell 2 1 Creare Inc., Hanover, NH 2 Raytheon Space & Airborne Systems, El Segundo,
Developing a Robot Model using System-Level Design
 Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
Camera support for DSLR cameras and handheld camcorders
 Camera Support Camera support for DSLR cameras and handheld camcorders > Provides stability, balance and support > Distributes the weight of the camera set-up evenly across the body > Reduces fatigue on
Camera Support Camera support for DSLR cameras and handheld camcorders > Provides stability, balance and support > Distributes the weight of the camera set-up evenly across the body > Reduces fatigue on
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Assembly of thin gratings for soft x-ray telescopes
 Assembly of thin gratings for soft x-ray telescopes Mireille Akilian 1, Ralf K. Heilmann and Mark L. Schattenburg Space Nanotechnology Laboratory, MIT Kavli Institute for Astrophysics and Space Research,
Assembly of thin gratings for soft x-ray telescopes Mireille Akilian 1, Ralf K. Heilmann and Mark L. Schattenburg Space Nanotechnology Laboratory, MIT Kavli Institute for Astrophysics and Space Research,
Navigation for Future Space Exploration Missions Based on Imaging LiDAR Technologies. Alexandre Pollini Amsterdam,
 Navigation for Future Space Exploration Missions Based on Imaging LiDAR Technologies Alexandre Pollini Amsterdam, 12.11.2013 Presentation outline The needs: missions scenario Current benchmark in space
Navigation for Future Space Exploration Missions Based on Imaging LiDAR Technologies Alexandre Pollini Amsterdam, 12.11.2013 Presentation outline The needs: missions scenario Current benchmark in space
SGEO: Overview and Product Offering. Marco R. Fuchs. Marco R. R. Fuchs. DLR-ESA Workshop on ARTES 11. Marco R. Fuchs OHB Technology AG
 DLR-ESA Workshop on ARTES 11 SGEO: Overview and Product Offering Marco R. R. Fuchs June June29, 29, 2006 2006 Tegernsee, Tegernsee, Germany Germany Marco R. Fuchs Marco R. Fuchs OHB Technology AG OHB Technology
DLR-ESA Workshop on ARTES 11 SGEO: Overview and Product Offering Marco R. R. Fuchs June June29, 29, 2006 2006 Tegernsee, Tegernsee, Germany Germany Marco R. Fuchs Marco R. Fuchs OHB Technology AG OHB Technology