Model-Based Design of Automotive RT Applications
|
|
|
- Jesse Rose
- 5 years ago
- Views:
Transcription

1 Model-Based Design of Automotive RT Applications
2 Presentation Modeling approach Modeling concept Realization in tool chain Use cases Challenges in the automotive environment The automotive electronics challenge Some answers
3 Part I Modeling approach
4 Modeling Concept Architectural components and their relations Tasks execute algorithmic functions and logic functions Tasks transmit and receive signals (local and global) Tasks are simple tasks (no synchronisation during execution) Tasks run on hosts Hosts contain one or more controllers Controllers transmit and receive signals Controllers are connected to a network Controllers on one network form a cluster
5 Modeling Concept Synchronous system model Known and bound maximum execution time of tasks Known and bound maximum transmission duration of signals Known minimum interarrival time of task activation triggers Known minimum interarrival time of transmission requests for signals Periodic and phase locked system model An application cycle defines the basic periodicy of the application Task execution is triggered periodically, period is an integral divider of application cycle Task execution is triggered with a defined time offset to start of application cycle Signal transmission is triggered periodically, same rule for period
6 Modeling Concept Requirements Validation Functional Model Verification A -Model Test Source Code
7 Modeling Concept Functional Model Architecture Allocated Functional Model (AAFM) Architecture Model (AM) Virtual Prototype (VP) Middeware Code (MW) Source Code
8 Functional Model Model of application function Control algorithms, state machines, logic algorithms Model of environment Segmentation of model in particular functional parts Model does not contain architectural information Benefits Check basic correctness of application algorithms Full access to all system signals for testing and debugging
9 Functional Model A/D Objects Control loop Parameters Control period
10 Architecture-Allocated Functional Model Assignment of model parts to architectural components Assignment to hardware (host, network) Assignment to software (task) Communication modelled by generic connectors Benefit Defines the hardware and software architecture for the application Allows generic simulation of task activation and communication
11 Architecture-Allocated Functional Model ECU 2 A/D ECU 1 Objects Control loops Hosts Tasks Generic connectors Parameters Task periods Task offsets ECU 3
12 Architecture Model Pure architecture information Software model (tasks and signals forming transactions) Hardware model (hosts, networks) Relevant parameters Task timing (period, offset, WCET) Task communication relations (signals transmitted and received) Signal parameter (period, offset, signal representation) Assignments of tasks to hardware components Benefits Mapping of transactions to a communication technology Generation of configuration data for OS, middleware and communication controllers
13 Architecture Model ECU 2 ECU 1 Objects Hosts Tasks Generic connectors Network topology Message schedule Parameters Task offsets Signal periods Signal offsets ECU 3
14 Virtual Prototype Extension of the architecture-allocated functional model Generated technology mapping parameters are added to the AAFM Generic simulation modules are exchanged by specific technology simulators Benefit Simulation of application function under influence of operating system and communication Task activation and preemption simulation Communication timing and scaling simulation Startup and restart simulation Full access to all system signals for testing and debugging Model based fault-injection Model based testing
15 Virtual Prototype ECU 2 A/D ECU 1 Communication Simulator OS Simulator ECU 3
16 Realization in tool chain Functional Model Architecture Allocated Functional Model SIMSYSTEM (AAFM) DESIGNER Architecture Model (AM) Virtual Prototype (VP) SIMSYSTEM SIMCOM GENERATOR SIMTARGET Middeware Code (MW) Source Code
17 Technologies Modeling tool MATLAB/Simulink DECOMSYS blocksets Code Generation Real-Time Workshop Embedded Coder in preparation Technology Mapping and software environment DECOMSYS tools and OSEKtime/FTCom for FlexRay communication protocol 3SOFT ProOSEKtime/OS

18 SIMSYSTEM Architectural design elements Hardware: networks, hosts Software: tasks, connectors Function Blockset library Simulation of time-driven task activation Generic simulation of communication without technology information Automatic generation of and interaction with architectural model

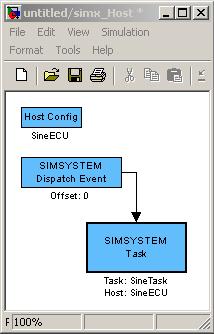
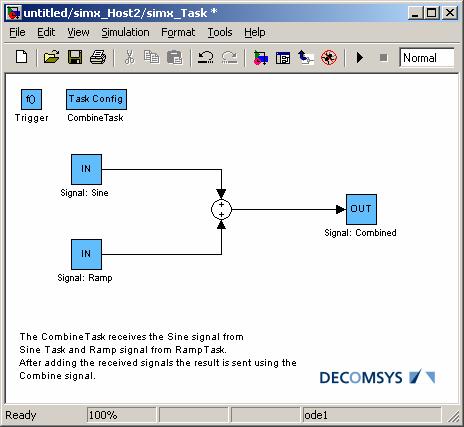
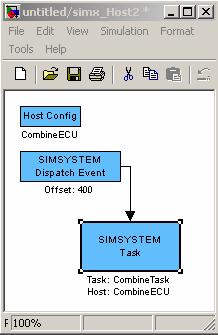
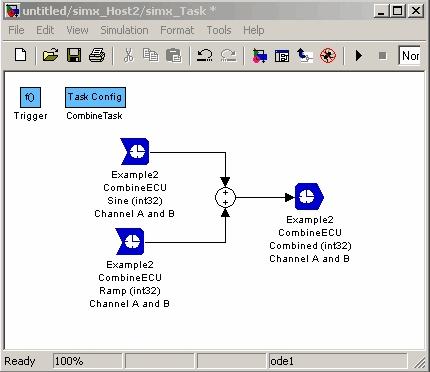
19 SIMSYSTEM Screen Shots
 Simulates OS synchronous to communication system Simulation based fault")
20 SIMCOM Communication technology simulation Technology specific simulation core Uses configuration parameters from architectural model Function Simulates signal transmission timing Simulates signal scaling effects Simulates middleware influence (FTCom) Simulates OS synchronous to communication system Simulation based fault injection

21 SIMCOM Screen Shots
22 Use Cases Application Development for single electronic control unit Model Based Testing
23 Application Development for Single ECU Development of functional model Application functions Environment simulation functions Stimuli generation functions Architecture specification Separation of ECU functions and remaining system functions Defintion of software and hardware architecture Technology mapping Scheduling for communication technology Generation of configuration parameters
24 Application Development for Single ECU Virtual Prototype Tesing and validation of application functions in simulation Application to real hardware Code generation or hand coding for ECU Code generation for remaining system separately Application of remaining system code to power node Connect single ECU and power node via bus system Testing of ECU function against model running in power node
25 Model Based Testing Development of functional model Same as for application development Assertion functions Additional assertion functions are added to functional model Assertion functions define correctness conditions that must hold for application Assertion functions use signals as input and generate boolean statements Execution Assertion functions are active in virtual prototype by simulation Assertion functions are executed in real hardware by generated assertion code on power node
26 Part II Challenges in the automotive environment
27 Automotive Electronics Challenge Challenges for future electronic architectures Reusability of software functions Standardization of software infrastructure Scalability of subsystems for multiple model classes Dr. Thomas Scharnhorst, VW EES at 3SOFT Automotive Day 2003 Other requirements Support for colaborative development Integration in existing processes and tool environments Integration with other tools along the V-model Design and modeling tools should support these requirements
28 Some Answers Key architectural properties for tool chain Separation between functional model software model hardware model and technology Mechanisms to Import and export functional model parts Extract and apply software and hardware architecture information Import and apply technology mapping parameters Open and standardized interfaces For integration in existing tool environments For OS and communication middleware (for code generation)
29 Closing Use of model-based design tools in automotive industry Still not commonly used Still development to do Interest in processes for development of safety critical application will increase interest in model-based design tools Economic pressure and complexity are other motivators torwards model-based design approaches
FlexRay International Workshop. Protocol Overview
 FlexRay International Workshop 4 th March 2003 Detroit Protocol Overview Dr. Christopher Temple - Motorola FlexRay principles Provide a communication infrastructure for future generation highspeed control
FlexRay International Workshop 4 th March 2003 Detroit Protocol Overview Dr. Christopher Temple - Motorola FlexRay principles Provide a communication infrastructure for future generation highspeed control
Guido Sandmann MathWorks GmbH. Michael Seibt Mentor Graphics GmbH ABSTRACT INTRODUCTION - WORKFLOW OVERVIEW
 2012-01-0962 AUTOSAR-Compliant Development Workflows: From Architecture to Implementation Tool Interoperability for Round-Trip Engineering and Verification & Validation Copyright 2012 The MathWorks, Inc.
2012-01-0962 AUTOSAR-Compliant Development Workflows: From Architecture to Implementation Tool Interoperability for Round-Trip Engineering and Verification & Validation Copyright 2012 The MathWorks, Inc.
An Encapsulated Communication System for Integrated Architectures
 An Encapsulated Communication System for Integrated Architectures Architectural Support for Temporal Composability Roman Obermaisser Overview Introduction Federated and Integrated Architectures DECOS Architecture
An Encapsulated Communication System for Integrated Architectures Architectural Support for Temporal Composability Roman Obermaisser Overview Introduction Federated and Integrated Architectures DECOS Architecture
Software Architecture. Definition of Software Architecture. The importance of software architecture. Contents of a good architectural model
 Software Architecture Definition of Software Architecture Software architecture is process of designing g the global organization of a software system, including: Dividing software into subsystems. Deciding
Software Architecture Definition of Software Architecture Software architecture is process of designing g the global organization of a software system, including: Dividing software into subsystems. Deciding
Simulation based Timing Analysis of FlexRay Communication at System Level. Stefan Buschmann Till Steinbach Franz Korf Thomas C.
 Simulation based Timing Analysis of FlexRay Communication at System Level Stefan Buschmann Till Steinbach Franz Korf Thomas C. Schmidt stefan.buschmann@haw-hamburg.de {till.steinbach, korf, schmidt}@informatik.haw-hamburg.de
Simulation based Timing Analysis of FlexRay Communication at System Level Stefan Buschmann Till Steinbach Franz Korf Thomas C. Schmidt stefan.buschmann@haw-hamburg.de {till.steinbach, korf, schmidt}@informatik.haw-hamburg.de
Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry
 Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry A Time-Triggered Middleware for Safety- Critical Automotive Applications Ayhan Mehmet, Maximilian Rosenblattl, Wilfried
Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry A Time-Triggered Middleware for Safety- Critical Automotive Applications Ayhan Mehmet, Maximilian Rosenblattl, Wilfried
Field buses (part 2): time triggered protocols
: time triggered protocols") Field buses (part 2): time triggered protocols Nico Fritz Universität des Saarlandes Embedded Systems 2002/2003 (c) Daniel Kästner. 1 CAN and LIN LIN CAN Type Arbitration Transfer rate Serial communication
Field buses (part 2): time triggered protocols Nico Fritz Universität des Saarlandes Embedded Systems 2002/2003 (c) Daniel Kästner. 1 CAN and LIN LIN CAN Type Arbitration Transfer rate Serial communication
PREEvision Technical Article
 PREEvision Technical Article AUTOSAR-Conformant Vehicle Diagnostics over : Developing Diagnostic Communications for E/E Systems The electronically controlled systems of modern vehicles are networked with
PREEvision Technical Article AUTOSAR-Conformant Vehicle Diagnostics over : Developing Diagnostic Communications for E/E Systems The electronically controlled systems of modern vehicles are networked with
Developing deterministic networking technology for railway applications using TTEthernet software-based end systems
 Developing deterministic networking technology for railway applications using TTEthernet software-based end systems Project n 100021 Astrit Ademaj, TTTech Computertechnik AG Outline GENESYS requirements
Developing deterministic networking technology for railway applications using TTEthernet software-based end systems Project n 100021 Astrit Ademaj, TTTech Computertechnik AG Outline GENESYS requirements
Product Information Embedded Operating Systems
 Product Information Embedded Operating Systems Table of Contents 1 Operating Systems for ECUs... 3 2 MICROSAR.OS The Real-Time Operating System for the AUTOSAR Standard... 3 2.1 Overview of Advantages...
Product Information Embedded Operating Systems Table of Contents 1 Operating Systems for ECUs... 3 2 MICROSAR.OS The Real-Time Operating System for the AUTOSAR Standard... 3 2.1 Overview of Advantages...
Handling Challenges of Multi-Core Technology in Automotive Software Engineering
 Model Based Development Tools for Embedded Multi-Core Systems Handling Challenges of Multi-Core Technology in Automotive Software Engineering VECTOR INDIA CONFERENCE 2017 Timing-Architects Embedded Systems
Model Based Development Tools for Embedded Multi-Core Systems Handling Challenges of Multi-Core Technology in Automotive Software Engineering VECTOR INDIA CONFERENCE 2017 Timing-Architects Embedded Systems
Model Based Development of Embedded Control Software
 Model Based Development of Embedded Control Software Part 4: Supported Target Platforms Claudiu Farcas Credits: MoDECS Project Team, Giotto Department of Computer Science cs.uni-salzburg.at Current execution
Model Based Development of Embedded Control Software Part 4: Supported Target Platforms Claudiu Farcas Credits: MoDECS Project Team, Giotto Department of Computer Science cs.uni-salzburg.at Current execution
Reuse of Hardware Independent Test Sequences across MiL-, SiL- and HiL-Test Scenarios
 Reuse of Hardware Independent Test Sequences across MiL-, SiL- and HiL-Test Scenarios Testing Expo 2008 Stuttgart Berner & Mattner Systemtechnik GmbH Contents Test methods in the automotive industry Problems
Reuse of Hardware Independent Test Sequences across MiL-, SiL- and HiL-Test Scenarios Testing Expo 2008 Stuttgart Berner & Mattner Systemtechnik GmbH Contents Test methods in the automotive industry Problems
AUTOSAR proofs to be THE automotive software platform for intelligent mobility
 AUTOSAR proofs to be THE automotive software platform for intelligent mobility Dr.-Ing. Thomas Scharnhorst AUTOSAR Spokesperson Simon Fürst, BMW AG Stefan Rathgeber, Continental Corporation Lorenz Slansky,
AUTOSAR proofs to be THE automotive software platform for intelligent mobility Dr.-Ing. Thomas Scharnhorst AUTOSAR Spokesperson Simon Fürst, BMW AG Stefan Rathgeber, Continental Corporation Lorenz Slansky,
Experiences with CANoe-based Fault Injection for AUTOSAR
 Experiences with CANoe-based Fault Injection for AUTOSAR Patrick E. Lanigan, Priya Narasimhan Electrical & Computer Engineering Carnegie Mellon University Thomas E. Fuhrman Research & Development General
Experiences with CANoe-based Fault Injection for AUTOSAR Patrick E. Lanigan, Priya Narasimhan Electrical & Computer Engineering Carnegie Mellon University Thomas E. Fuhrman Research & Development General
SPIDER: A Fault-Tolerant Bus Architecture
 Formal Methods Group NASA Langley Research Center lee.s.pike@nasa.gov May 11, 2005 Motivation Safety-critical distributed x-by-wire applications are being deployed in inhospitable environments. Failure
Formal Methods Group NASA Langley Research Center lee.s.pike@nasa.gov May 11, 2005 Motivation Safety-critical distributed x-by-wire applications are being deployed in inhospitable environments. Failure
SWE 760 Lecture 1: Introduction to Analysis & Design of Real-Time Embedded Systems
 SWE 760 Lecture 1: Introduction to Analysis & Design of Real-Time Embedded Systems Hassan Gomaa References: H. Gomaa, Chapters 1, 2, 3 - Real-Time Software Design for Embedded Systems, Cambridge University
SWE 760 Lecture 1: Introduction to Analysis & Design of Real-Time Embedded Systems Hassan Gomaa References: H. Gomaa, Chapters 1, 2, 3 - Real-Time Software Design for Embedded Systems, Cambridge University
Schedule Integration for Time-Triggered Systems
 Schedule Integration for Time-Triggered Systems Outline Motivation Automotive software Automotive architectures Integration Challenge Time-triggered automotive systems Sychronization Schedule Integration
Schedule Integration for Time-Triggered Systems Outline Motivation Automotive software Automotive architectures Integration Challenge Time-triggered automotive systems Sychronization Schedule Integration
INCA-EIP V7.2 User s Guide
 INCA-EIP V7.2 User s Guide Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation to this
INCA-EIP V7.2 User s Guide Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation to this
Task- and Network-level Schedule Co-Synthesis of Ethernet-based Time-triggered Systems
 Task- and Network-level Schedule Co-Synthesis of Ethernet-based Time-triggered Systems 2 Licong Zhang, Dip Goswami, Reinhard Schneider, Samarjit Chakraborty 1 1 1 1 Institute for Real-Time Computer Systems,
Task- and Network-level Schedule Co-Synthesis of Ethernet-based Time-triggered Systems 2 Licong Zhang, Dip Goswami, Reinhard Schneider, Samarjit Chakraborty 1 1 1 1 Institute for Real-Time Computer Systems,
Introduction to the Distributed Real-Time System
 Introduction to the Distributed Real-Time System Insup Lee Department of Computer and Information Science School of Engineering and Applied Science University of Pennsylvania www.cis.upenn.edu/~lee/ CIS
Introduction to the Distributed Real-Time System Insup Lee Department of Computer and Information Science School of Engineering and Applied Science University of Pennsylvania www.cis.upenn.edu/~lee/ CIS
Fast and Accurate Source-Level Simulation Considering Target-Specific Compiler Optimizations
 FZI Forschungszentrum Informatik at the University of Karlsruhe Fast and Accurate Source-Level Simulation Considering Target-Specific Compiler Optimizations Oliver Bringmann 1 RESEARCH ON YOUR BEHALF Outline
FZI Forschungszentrum Informatik at the University of Karlsruhe Fast and Accurate Source-Level Simulation Considering Target-Specific Compiler Optimizations Oliver Bringmann 1 RESEARCH ON YOUR BEHALF Outline
TU Wien. Fault Isolation and Error Containment in the TT-SoC. H. Kopetz. TU Wien. July 2007
 TU Wien 1 Fault Isolation and Error Containment in the TT-SoC H. Kopetz TU Wien July 2007 This is joint work with C. El.Salloum, B.Huber and R.Obermaisser Outline 2 Introduction The Concept of a Distributed
TU Wien 1 Fault Isolation and Error Containment in the TT-SoC H. Kopetz TU Wien July 2007 This is joint work with C. El.Salloum, B.Huber and R.Obermaisser Outline 2 Introduction The Concept of a Distributed
Organic Self-organizing Bus-based Communication Systems
 Organic Self-organizing Bus-based Communication Systems, Stefan Wildermann, Jürgen Teich Hardware-Software-Co-Design Universität Erlangen-Nürnberg tobias.ziermann@informatik.uni-erlangen.de 15.09.2011
Organic Self-organizing Bus-based Communication Systems, Stefan Wildermann, Jürgen Teich Hardware-Software-Co-Design Universität Erlangen-Nürnberg tobias.ziermann@informatik.uni-erlangen.de 15.09.2011
A specification proposed by JASPAR has been adopted for AUTOSAR.
 Japan Automotive Software Platform and Architecture A specification proposed by JASPAR has been adopted for AUTOSAR. JASPAR General Incorporated Association 1. Introduction An RTE profile specification
Japan Automotive Software Platform and Architecture A specification proposed by JASPAR has been adopted for AUTOSAR. JASPAR General Incorporated Association 1. Introduction An RTE profile specification
Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007
 Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007 Automotive Networks complex networks hundreds of functions 50+ ECUs (Electronic Control Unit)
Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007 Automotive Networks complex networks hundreds of functions 50+ ECUs (Electronic Control Unit)
Virtual Hardware ECU How to Significantly Increase Your Testing Throughput!
 Virtual Hardware ECU How to Significantly Increase Your Testing Throughput! Elektrobit Tech Day Jason Niatas Synopsys Inc. July 27, 2017 2017 Synopsys, Inc. 1 Agenda Automotive electronic evolution and
Virtual Hardware ECU How to Significantly Increase Your Testing Throughput! Elektrobit Tech Day Jason Niatas Synopsys Inc. July 27, 2017 2017 Synopsys, Inc. 1 Agenda Automotive electronic evolution and
Embedded Software Programming
 Embedded Software Programming Computer Science & Engineering Department Arizona State University Tempe, AZ 85287 Dr. Yann-Hang Lee yhlee@asu.edu (480) 727-7507 Event and Time-Driven Threads taskspawn (name,
Embedded Software Programming Computer Science & Engineering Department Arizona State University Tempe, AZ 85287 Dr. Yann-Hang Lee yhlee@asu.edu (480) 727-7507 Event and Time-Driven Threads taskspawn (name,
The AUTOSAR Timing Model --- Status and Challenges. Dr. Kai Richter Symtavision GmbH, Germany
 The AUTAR Timing Model --- Status and Challenges Dr. Kai Richter Symtavision GmbH, Germany Symtavision GmbH Who we are! Spin-off from Technical University of Braunschweig, Germany, founded May 2005 Timing
The AUTAR Timing Model --- Status and Challenges Dr. Kai Richter Symtavision GmbH, Germany Symtavision GmbH Who we are! Spin-off from Technical University of Braunschweig, Germany, founded May 2005 Timing
From Signal to Service
 From Signal to Service Challenges for the Development of AUTOSAR Adaptive Applications Automotive Ethernet and AUTOSAR Adaptive are key technologies for highly automated driving and comprehensive connectivity
From Signal to Service Challenges for the Development of AUTOSAR Adaptive Applications Automotive Ethernet and AUTOSAR Adaptive are key technologies for highly automated driving and comprehensive connectivity
Architecture concepts in Body Control Modules
 Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) Course 7 www.continental-corporation.com Interior Body and Security Table Of Contents
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) Course 7 www.continental-corporation.com Interior Body and Security Table Of Contents
CAN FD with Dynamic Multi-PDU-to-Frame Mapping
 CAN FD with Dynamic Multi-PDU-to-Frame Mapping Flexible Network Architectures V0.1 2015-09-25 E/E Trends and Challenges Why is Dynamic Multi-PDU-to-Frame Mapping required? The Trend: Demand for communication
CAN FD with Dynamic Multi-PDU-to-Frame Mapping Flexible Network Architectures V0.1 2015-09-25 E/E Trends and Challenges Why is Dynamic Multi-PDU-to-Frame Mapping required? The Trend: Demand for communication
B.H.GARDI COLLEGE OF ENGINEERING & TECHNOLOGY (MCA Dept.) Parallel Database Database Management System - 2
 Parallel Database Database Management System - 2") Introduction :- Today single CPU based architecture is not capable enough for the modern database that are required to handle more demanding and complex requirements of the users, for example, high performance,
Introduction :- Today single CPU based architecture is not capable enough for the modern database that are required to handle more demanding and complex requirements of the users, for example, high performance,
A Model-Driven Approach to Embedded Control System Implementation
 A Model-Driven Approach to Embedded Control System Implementation Jan F. Broenink, Marcel A. Groothuis, Peter M. Visser, Bojan Orlic Control Engineering, CTIT, Faculty EE-M-CS,, Enschede, Netherlands e-mail:
A Model-Driven Approach to Embedded Control System Implementation Jan F. Broenink, Marcel A. Groothuis, Peter M. Visser, Bojan Orlic Control Engineering, CTIT, Faculty EE-M-CS,, Enschede, Netherlands e-mail:
ASAM-MCD-2 NET (FIBEX)
") ASAM-MCD-2 NET (FIBEX) Data Model for ECU Network Systems (Field Bus Data Exchange Format) Version 4.1.2 Date: 2017-06-02 Base Standard by ASAM e.v., 2017 Disclaimer This document is the copyrighted property
ASAM-MCD-2 NET (FIBEX) Data Model for ECU Network Systems (Field Bus Data Exchange Format) Version 4.1.2 Date: 2017-06-02 Base Standard by ASAM e.v., 2017 Disclaimer This document is the copyrighted property
Real-Time Component Software. slide credits: H. Kopetz, P. Puschner
 Real-Time Component Software slide credits: H. Kopetz, P. Puschner Overview OS services Task Structure Task Interaction Input/Output Error Detection 2 Operating System and Middleware Application Software
Real-Time Component Software slide credits: H. Kopetz, P. Puschner Overview OS services Task Structure Task Interaction Input/Output Error Detection 2 Operating System and Middleware Application Software
Software Architecture
 Software Architecture Architectural Design and Patterns. Standard Architectures. Dr. Philipp Leitner @xleitix University of Zurich, Switzerland software evolution & architecture lab Architecting, the planning
Software Architecture Architectural Design and Patterns. Standard Architectures. Dr. Philipp Leitner @xleitix University of Zurich, Switzerland software evolution & architecture lab Architecting, the planning
Scalable and Flexible Software Platforms for High-Performance ECUs. Christoph Dietachmayr Sr. Engineering Manager, Elektrobit November 8, 2018
 Scalable and Flexible Software Platforms for High-Performance ECUs Christoph Dietachmayr Sr. Engineering Manager, November 8, Agenda A New E/E Architectures and High-Performance ECUs B Non-Functional Aspects:
Scalable and Flexible Software Platforms for High-Performance ECUs Christoph Dietachmayr Sr. Engineering Manager, November 8, Agenda A New E/E Architectures and High-Performance ECUs B Non-Functional Aspects:
In Vehicle Networking : a Survey and Look Forward
 In Vehicle Networking : a Survey and Look Forward Nicolas Navet Workshop on Specialized Networks, ETFA09, Palma, Spain - 25/09/2009 Complexity Mastered Outline 1. Architecture of Automotive Embedded Systems
In Vehicle Networking : a Survey and Look Forward Nicolas Navet Workshop on Specialized Networks, ETFA09, Palma, Spain - 25/09/2009 Complexity Mastered Outline 1. Architecture of Automotive Embedded Systems
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Rinat Asmus AUTOSAR Project Leader BMW AUTOSAR Adaptive Platform AUTOSAR Nov-2017 New Challenges One Standard. Do AUTOSAR Core partners commit to standard use? Is the implementation
10 th AUTOSAR Open Conference Rinat Asmus AUTOSAR Project Leader BMW AUTOSAR Adaptive Platform AUTOSAR Nov-2017 New Challenges One Standard. Do AUTOSAR Core partners commit to standard use? Is the implementation
Time-Triggered Ethernet
 Time-Triggered Ethernet Chapters 42 in the Textbook Professor: HONGWEI ZHANG CSC8260 Winter 2016 Presented By: Priyank Baxi (fr0630) fr0630@wayne.edu Outline History Overview TTEthernet Traffic Classes
Time-Triggered Ethernet Chapters 42 in the Textbook Professor: HONGWEI ZHANG CSC8260 Winter 2016 Presented By: Priyank Baxi (fr0630) fr0630@wayne.edu Outline History Overview TTEthernet Traffic Classes
CANalyzer.MOST. Product Information
 Product Information Table of Contents 1 Introduction to CANalyzer.MOST... 3 2 Interactive Analyses and Tests... 4 2.1 Analysis... 4 2.2 Stimulation... 8 3 Automated Analyses and Stimulation... 10 4 Other
Product Information Table of Contents 1 Introduction to CANalyzer.MOST... 3 2 Interactive Analyses and Tests... 4 2.1 Analysis... 4 2.2 Stimulation... 8 3 Automated Analyses and Stimulation... 10 4 Other
SYNCHRONOUS MULTIMEDIA AND VEHICLE DATA
 ViCANdo is an easy to use ADAS systems test and simulation environment that includes Ethernet, FlexRay, CAN, LIN, MOST as communication busses, as well as Video and sound analysis built for daily use for
ViCANdo is an easy to use ADAS systems test and simulation environment that includes Ethernet, FlexRay, CAN, LIN, MOST as communication busses, as well as Video and sound analysis built for daily use for
NET. A Hardware/Software Co-Design Approach for Ethernet Controllers to Support Time-triggered Trac in the Upcoming IEEE TSN Standards
 NET A Hardware/Software Co-Design Approach for Ethernet Controllers to Support Time-triggered Trac in the Upcoming IEEE TSN Standards Friedrich Groÿ Till Steinbach Franz Korf Thomas C. Schmidt Bernd Schwarz
NET A Hardware/Software Co-Design Approach for Ethernet Controllers to Support Time-triggered Trac in the Upcoming IEEE TSN Standards Friedrich Groÿ Till Steinbach Franz Korf Thomas C. Schmidt Bernd Schwarz
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Dr. Moritz Neukirchner Elektrobit Automotive GmbH Building Performance ECUs with Adaptive AUTOSAR AUTOSAR Nov-2017 Major market trends and their impact Trends Impact on E/E
10 th AUTOSAR Open Conference Dr. Moritz Neukirchner Elektrobit Automotive GmbH Building Performance ECUs with Adaptive AUTOSAR AUTOSAR Nov-2017 Major market trends and their impact Trends Impact on E/E
AVS: A Test Suite for Automatically Generated Code
 AVS: A Test Suite for Automatically Generated Code Ekkehard Pofahl Ford Motor Company Torsten Sauer Continental Automotive Systems Oliver Busa TUV Rheinland Industrie Service GmbH Page 1 of 22 AVS: Automotive
AVS: A Test Suite for Automatically Generated Code Ekkehard Pofahl Ford Motor Company Torsten Sauer Continental Automotive Systems Oliver Busa TUV Rheinland Industrie Service GmbH Page 1 of 22 AVS: Automotive
Fault-Injection testing and code coverage measurement using Virtual Prototypes on the context of the ISO standard
 Fault-Injection testing and code coverage measurement using Virtual Prototypes on the context of the ISO 26262 standard NMI Automotive Electronics Systems 2013 Event Victor Reyes Technical Marketing System
Fault-Injection testing and code coverage measurement using Virtual Prototypes on the context of the ISO 26262 standard NMI Automotive Electronics Systems 2013 Event Victor Reyes Technical Marketing System
The CAN Bus From its Early Days to CAN FD By Friedhelm Pickhard (ETAS/P)
") By Friedhelm Pickhard (ETAS/P) 1 ETAS Introduction to ETAS Group ETAS Group Corporate Profile Founded 1994 Shareholder Headquarters 100 % Robert Bosch GmbH Stuttgart, Germany 18 additional offices worldwide
By Friedhelm Pickhard (ETAS/P) 1 ETAS Introduction to ETAS Group ETAS Group Corporate Profile Founded 1994 Shareholder Headquarters 100 % Robert Bosch GmbH Stuttgart, Germany 18 additional offices worldwide
FIXED PRIORITY SCHEDULING ANALYSIS OF THE POWERTRAIN MANAGEMENT APPLICATION EXAMPLE USING THE SCHEDULITE TOOL
 FIXED PRIORITY SCHEDULING ANALYSIS OF THE POWERTRAIN MANAGEMENT APPLICATION EXAMPLE USING THE SCHEDULITE TOOL Jens Larsson t91jla@docs.uu.se Technical Report ASTEC 97/03 DoCS 97/82 Department of Computer
FIXED PRIORITY SCHEDULING ANALYSIS OF THE POWERTRAIN MANAGEMENT APPLICATION EXAMPLE USING THE SCHEDULITE TOOL Jens Larsson t91jla@docs.uu.se Technical Report ASTEC 97/03 DoCS 97/82 Department of Computer
Impact of Platform Abstractions on the Development Workflow
 Impact of Platform Abstractions on the Development Workflow Johannes Pletzer, Wolfgang Pree Technical Report September 7, 2009 C. Doppler Laboratory Embedded Software Systems University of Salzburg Austria
Impact of Platform Abstractions on the Development Workflow Johannes Pletzer, Wolfgang Pree Technical Report September 7, 2009 C. Doppler Laboratory Embedded Software Systems University of Salzburg Austria
Safety and Reliability of Software-Controlled Systems Part 14: Fault mitigation
 Safety and Reliability of Software-Controlled Systems Part 14: Fault mitigation Prof. Dr.-Ing. Stefan Kowalewski Chair Informatik 11, Embedded Software Laboratory RWTH Aachen University Summer Semester
Safety and Reliability of Software-Controlled Systems Part 14: Fault mitigation Prof. Dr.-Ing. Stefan Kowalewski Chair Informatik 11, Embedded Software Laboratory RWTH Aachen University Summer Semester
Timing Definition Language (TDL) Concepts, Code Generation and Tools
 Concepts, Code Generation and Tools") Timing Definition Language (TDL) Concepts, Code Generation and Tools Wolfgang Pree Embedded Software & Systems Research Center Department of Computer Sciences Univ. Salzburg Overview Motivation Timing
Timing Definition Language (TDL) Concepts, Code Generation and Tools Wolfgang Pree Embedded Software & Systems Research Center Department of Computer Sciences Univ. Salzburg Overview Motivation Timing
I/O Systems. Amir H. Payberah. Amirkabir University of Technology (Tehran Polytechnic)
") I/O Systems Amir H. Payberah amir@sics.se Amirkabir University of Technology (Tehran Polytechnic) Amir H. Payberah (Tehran Polytechnic) I/O Systems 1393/9/15 1 / 57 Motivation Amir H. Payberah (Tehran
I/O Systems Amir H. Payberah amir@sics.se Amirkabir University of Technology (Tehran Polytechnic) Amir H. Payberah (Tehran Polytechnic) I/O Systems 1393/9/15 1 / 57 Motivation Amir H. Payberah (Tehran
Flexray Communication Controller for Intra-Vehicular Communication and Its Realization in FPGA
 2016 IJSRSET Volume 2 Issue 1 Print ISSN : 2395-1990 Online ISSN : 2394-4099 Themed Section: Engineering and Technology Flexray Communication Controller for Intra-Vehicular Communication and Its Realization
2016 IJSRSET Volume 2 Issue 1 Print ISSN : 2395-1990 Online ISSN : 2394-4099 Themed Section: Engineering and Technology Flexray Communication Controller for Intra-Vehicular Communication and Its Realization
Extending RTAI Linux with Fixed-Priority Scheduling with Deferred Preemption
 Extending RTAI Linux with Fixed-Priority Scheduling with Deferred Preemption Mark Bergsma, Mike Holenderski, Reinder J. Bril, Johan J. Lukkien System Architecture and Networking Department of Mathematics
Extending RTAI Linux with Fixed-Priority Scheduling with Deferred Preemption Mark Bergsma, Mike Holenderski, Reinder J. Bril, Johan J. Lukkien System Architecture and Networking Department of Mathematics
Lecture 2. Basics of networking in automotive systems: Network. topologies, communication principles and standardised protocols
 Lecture 2. Basics of networking in automotive systems: Network topologies, communication principles and standardised protocols Objectives Introduce basic concepts used in building networks for automotive
Lecture 2. Basics of networking in automotive systems: Network topologies, communication principles and standardised protocols Objectives Introduce basic concepts used in building networks for automotive
An Introduction to TTEthernet
 An Introduction to thernet TU Vienna, Apr/26, 2013 Guest Lecture in Deterministic Networking (DetNet) Wilfried Steiner, Corporate Scientist wilfried.steiner@tttech.com Copyright TTTech Computertechnik
An Introduction to thernet TU Vienna, Apr/26, 2013 Guest Lecture in Deterministic Networking (DetNet) Wilfried Steiner, Corporate Scientist wilfried.steiner@tttech.com Copyright TTTech Computertechnik
Madhya Pradesh Bhoj (Open) University, Bhopal Diploma in Computer Application (DCA) Assignment Question Paper I
 University, Bhopal Diploma in Computer Application (DCA) Assignment Question Paper I") Subject : - Fundamental of Computer and IT Maximum Marks : 30 1. Explain various characteristics of computer & various uses of it. 2. What is the software? Discuss the characteristics of user-friendly
Subject : - Fundamental of Computer and IT Maximum Marks : 30 1. Explain various characteristics of computer & various uses of it. 2. What is the software? Discuss the characteristics of user-friendly
OSEK/VDX. Time-Triggered Operating System. Version 1.0. July 24 th 2001
 OSEK/VDX Version 1.0 July 24 th 2001 This document is an official release. The OSEK group retains the right to make changes to this document without notice and does not accept any liability for errors.
OSEK/VDX Version 1.0 July 24 th 2001 This document is an official release. The OSEK group retains the right to make changes to this document without notice and does not accept any liability for errors.
A Time-Triggered View. Peter PUSCHNER
 Predictable Timing on MPSoC A Time-Triggered View Peter PUSCHNER 1 st Workshop on Mapping Applications to MPSoCs Schloss Rheinfels, Germany June 2008 Focus goal: build safety-critical hard real-time systems
Predictable Timing on MPSoC A Time-Triggered View Peter PUSCHNER 1 st Workshop on Mapping Applications to MPSoCs Schloss Rheinfels, Germany June 2008 Focus goal: build safety-critical hard real-time systems
FlexRay and Automotive Networking Future
 FlexRay and Automotive Networking Future Chris Quigley Warwick Control Technologies Presentation Overview High Speed and High Integrity Networking Why FlexRay? CAN Problems Time Triggered Network Principles
FlexRay and Automotive Networking Future Chris Quigley Warwick Control Technologies Presentation Overview High Speed and High Integrity Networking Why FlexRay? CAN Problems Time Triggered Network Principles
Rapid Control Prototyping Solutions Electrical Drive, Power Conversion and Power Systems
 Rapid Control Prototyping Solutions Electrical Drive, Power Conversion and Power Systems Presented by Guillaume Boué guillaume.boue@opal-rt.com 2013 OPAL-RT www.opal-rt.com Presentation outline WHY INTRO
Rapid Control Prototyping Solutions Electrical Drive, Power Conversion and Power Systems Presented by Guillaume Boué guillaume.boue@opal-rt.com 2013 OPAL-RT www.opal-rt.com Presentation outline WHY INTRO
Wind River. All Rights Reserved.
 1 Using Simulation to Develop and Maintain a System of Connected Devices Didier Poirot Simics Technical Account Manager THE CHALLENGES OF DEVELOPING CONNECTED ELECTRONIC SYSTEMS 3 Mobile Networks Update
1 Using Simulation to Develop and Maintain a System of Connected Devices Didier Poirot Simics Technical Account Manager THE CHALLENGES OF DEVELOPING CONNECTED ELECTRONIC SYSTEMS 3 Mobile Networks Update
This document is a preview generated by EVS
 INTERNATIONAL STANDARD ISO 17458-2 First edition 2013-02-01 Road vehicles FlexRay communications system Part 2: Data link layer specification Véhicules routiers Système de communications FlexRay Partie
INTERNATIONAL STANDARD ISO 17458-2 First edition 2013-02-01 Road vehicles FlexRay communications system Part 2: Data link layer specification Véhicules routiers Système de communications FlexRay Partie
Design For High Performance Flexray Protocol For Fpga Based System
 IOSR Journal of VLSI and Signal Processing (IOSR-JVSP) e-issn: 2319 4200, p-issn No. : 2319 4197 PP 83-88 www.iosrjournals.org Design For High Performance Flexray Protocol For Fpga Based System E. Singaravelan
IOSR Journal of VLSI and Signal Processing (IOSR-JVSP) e-issn: 2319 4200, p-issn No. : 2319 4197 PP 83-88 www.iosrjournals.org Design For High Performance Flexray Protocol For Fpga Based System E. Singaravelan
PROJECT FINAL REPORT
 PROJECT FINAL REPORT Grant Agreement number: INFSO-ICT-224350 Project acronym: Project title: Funding Scheme: flexware Flexible Wireless Automation in Real-Time Environments STREP Period covered: from
PROJECT FINAL REPORT Grant Agreement number: INFSO-ICT-224350 Project acronym: Project title: Funding Scheme: flexware Flexible Wireless Automation in Real-Time Environments STREP Period covered: from
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel. Alexander Züpke, Marc Bommert, Daniel Lohmann
 AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
Application. Diagnosing the dashboard by the CANcheck software. Introduction
 Diagnosing the dashboard by the CANcheck software Introduction In recent years, vehicle electronics technology improved and advances day by day. A great of advanced electronic technology has been applied
Diagnosing the dashboard by the CANcheck software Introduction In recent years, vehicle electronics technology improved and advances day by day. A great of advanced electronic technology has been applied
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Dr. Günther Heling Vector Informatik AUTOSAR Adaptive Platform Now it s Time to get on Board AUTOSAR Nov-2017 Introduction At the first glance Adaptive and Classic don t have
10 th AUTOSAR Open Conference Dr. Günther Heling Vector Informatik AUTOSAR Adaptive Platform Now it s Time to get on Board AUTOSAR Nov-2017 Introduction At the first glance Adaptive and Classic don t have
MICROSAR-OS. Embedded Real-time Multitasking Operating Systems
 Embedded Real-time Multitasking Operating Systems 2013. Vector Informatik GmbH. All rights reserved. Any distribution or copying is subject to prior written approval by Vector. V 1.09 2013-05-03 AUTOSAR
Embedded Real-time Multitasking Operating Systems 2013. Vector Informatik GmbH. All rights reserved. Any distribution or copying is subject to prior written approval by Vector. V 1.09 2013-05-03 AUTOSAR
Multicore for safety-critical embedded systems: challenges andmarch opportunities 15, / 28
 Multicore for safety-critical embedded systems: challenges and opportunities Giuseppe Lipari CRItAL - Émeraude March 15, 2016 Multicore for safety-critical embedded systems: challenges andmarch opportunities
Multicore for safety-critical embedded systems: challenges and opportunities Giuseppe Lipari CRItAL - Émeraude March 15, 2016 Multicore for safety-critical embedded systems: challenges andmarch opportunities
Architectures of Automotive Electrical. Nicolas Navet. Can be freely used for teaching Complexity Mastered. Outline
 Architectures of Automotive Electrical and Electronics (E/E) Systems Nicolas Navet Teaching slides Can be freely used for teaching Complexity Mastered Outline 1. Architecture of Automotive Embedded Systems
Architectures of Automotive Electrical and Electronics (E/E) Systems Nicolas Navet Teaching slides Can be freely used for teaching Complexity Mastered Outline 1. Architecture of Automotive Embedded Systems
FlexRay - FlexRay Synchronization with CANoe as Gateway
 FlexRay - FlexRay Synchronization with CANoe as Gateway Version 2.0 2017-06-12 Application Note AN-IND-1-010 Author Restrictions Abstract Vector Informatik GmbH Public Document Time synchronization is
FlexRay - FlexRay Synchronization with CANoe as Gateway Version 2.0 2017-06-12 Application Note AN-IND-1-010 Author Restrictions Abstract Vector Informatik GmbH Public Document Time synchronization is
FlexRay The Hardware View
 A White Paper Presented by IPextreme FlexRay The Hardware View Stefan Schmechtig / Jens Kjelsbak February 2006 FlexRay is an upcoming networking standard being established to raise the data rate, reliability,
A White Paper Presented by IPextreme FlexRay The Hardware View Stefan Schmechtig / Jens Kjelsbak February 2006 FlexRay is an upcoming networking standard being established to raise the data rate, reliability,
Applying Model Intelligence Frameworks for Deployment Problem in Real-Time and Embedded Systems
 Applying Model Intelligence Frameworks for Deployment Problem in Real-Time and Embedded Systems Andrey Nechypurenko 1, Egon Wuchner 1, Jules White 2, and Douglas C. Schmidt 2 1 Siemens AG, Corporate Technology
Applying Model Intelligence Frameworks for Deployment Problem in Real-Time and Embedded Systems Andrey Nechypurenko 1, Egon Wuchner 1, Jules White 2, and Douglas C. Schmidt 2 1 Siemens AG, Corporate Technology
13 AutoFocus 3 - A Scientific Tool Prototype for Model-Based Development of Component-Based, Reactive, Distributed Systems
 13 AutoFocus 3 - A Scientific Tool Prototype for Model-Based Development of Component-Based, Reactive, Distributed Systems Florian Hölzl and Martin Feilkas Institut für Informatik Technische Universität
13 AutoFocus 3 - A Scientific Tool Prototype for Model-Based Development of Component-Based, Reactive, Distributed Systems Florian Hölzl and Martin Feilkas Institut für Informatik Technische Universität
A Practical Message ID Assignment Policy for Controller Area Network that Maximizes Extensibility
 A Practical Message ID Assignment Policy for Controller Area Network that Maximizes Extensibility Florian Pölzlbauer * Robert I. Davis Iain Bate COMET K2 Competence Center - Initiated by the Federal Ministry
A Practical Message ID Assignment Policy for Controller Area Network that Maximizes Extensibility Florian Pölzlbauer * Robert I. Davis Iain Bate COMET K2 Competence Center - Initiated by the Federal Ministry
Oracle Fusion Middleware 11g: Build Applications with ADF I
 Oracle University Contact Us: +966 1 1 2739 894 Oracle Fusion Middleware 11g: Build Applications with ADF I Duration: 5 Days What you will learn This course is aimed at developers who want to build Java
Oracle University Contact Us: +966 1 1 2739 894 Oracle Fusion Middleware 11g: Build Applications with ADF I Duration: 5 Days What you will learn This course is aimed at developers who want to build Java
Applying CORBA to embedded time-triggered real-time systems. S. Aslam-Mir (Sam) Principal CORBA Architect Vertel USA
 Principal CORBA Architect Vertel USA") Applying CORBA to embedded time-triggered real-time systems S. Aslam-Mir (Sam) Principal CORBA Architect Vertel USA sam@vertel.com Synopsis! Motivation Time Triggered vs Event Triggered! Real-time CORBA
Applying CORBA to embedded time-triggered real-time systems S. Aslam-Mir (Sam) Principal CORBA Architect Vertel USA sam@vertel.com Synopsis! Motivation Time Triggered vs Event Triggered! Real-time CORBA
A Framework for Rapid Application Development of Distributed Embedded Real-Time Systems
 1 A Framework for Rapid Application Development of Distributed Embedded Real-Time Systems R. Obermaisser, P. Peti Vienna University of Technology Vienna Austria email: {ro,php}@vmars.tuwien.ac.at Abstract
1 A Framework for Rapid Application Development of Distributed Embedded Real-Time Systems R. Obermaisser, P. Peti Vienna University of Technology Vienna Austria email: {ro,php}@vmars.tuwien.ac.at Abstract
Experience in Developing Model- Integrated Tools and Technologies for Large-Scale Fault Tolerant Real-Time Embedded Systems
 Institute for Software Integrated Systems Vanderbilt University Experience in Developing Model- Integrated Tools and Technologies for Large-Scale Fault Tolerant Real-Time Embedded Systems Presented by
Institute for Software Integrated Systems Vanderbilt University Experience in Developing Model- Integrated Tools and Technologies for Large-Scale Fault Tolerant Real-Time Embedded Systems Presented by
Embedded Systems Dr. Santanu Chaudhury Department of Electrical Engineering Indian Institute of Technology, Delhi
 Embedded Systems Dr. Santanu Chaudhury Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 13 Virtual memory and memory management unit In the last class, we had discussed
Embedded Systems Dr. Santanu Chaudhury Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 13 Virtual memory and memory management unit In the last class, we had discussed
Green Hills Software, Inc.
 Green Hills Software, Inc. A Safe Tasking Approach to Ada95 Jim Gleason Engineering Manager Ada Products 5.0-1 Overview Multiple approaches to safe tasking with Ada95 No Tasking - SPARK Ada95 Restricted
Green Hills Software, Inc. A Safe Tasking Approach to Ada95 Jim Gleason Engineering Manager Ada Products 5.0-1 Overview Multiple approaches to safe tasking with Ada95 No Tasking - SPARK Ada95 Restricted
An Introduction to Software Architecture. David Garlan & Mary Shaw 94
 An Introduction to Software Architecture David Garlan & Mary Shaw 94 Motivation Motivation An increase in (system) size and complexity structural issues communication (type, protocol) synchronization data
An Introduction to Software Architecture David Garlan & Mary Shaw 94 Motivation Motivation An increase in (system) size and complexity structural issues communication (type, protocol) synchronization data
Deterministic Ethernet & Unified Networking
 Deterministic Ethernet & Unified Networking Never bet against Ethernet Mirko Jakovljevic mirko.jakovljevic@tttech.com www.tttech.com Copyright TTTech Computertechnik AG. All rights reserved. About TTTech
Deterministic Ethernet & Unified Networking Never bet against Ethernet Mirko Jakovljevic mirko.jakovljevic@tttech.com www.tttech.com Copyright TTTech Computertechnik AG. All rights reserved. About TTTech
First GENESYS Architectures Implemented in the INDEXYS Project
 Project n 100021 First GENESYS Architectures Implemented in the INDEXYS Project An Overview on the Technical Project Contents and Status Quo Andreas Eckel, TTTech Computertechnik AG CROSS FUNDING-PROVIDER
Project n 100021 First GENESYS Architectures Implemented in the INDEXYS Project An Overview on the Technical Project Contents and Status Quo Andreas Eckel, TTTech Computertechnik AG CROSS FUNDING-PROVIDER
Distributed IMA with TTEthernet
 Distributed IMA with thernet ARINC 653 Integration of thernet Georg Gaderer, Product Manager Georg.Gaderer@tttech.com October 30, 2012 Copyright TTTech Computertechnik AG. All rights reserved. Introduction
Distributed IMA with thernet ARINC 653 Integration of thernet Georg Gaderer, Product Manager Georg.Gaderer@tttech.com October 30, 2012 Copyright TTTech Computertechnik AG. All rights reserved. Introduction
Formal Verification for safety critical requirements From Unit-Test to HIL
 Formal Verification for safety critical requirements From Unit-Test to HIL Markus Gros Director Product Sales Europe & North America BTC Embedded Systems AG Berlin, Germany markus.gros@btc-es.de Hans Jürgen
Formal Verification for safety critical requirements From Unit-Test to HIL Markus Gros Director Product Sales Europe & North America BTC Embedded Systems AG Berlin, Germany markus.gros@btc-es.de Hans Jürgen
Understanding and Using the Controller Area Network Communication Protocol
 Marco Di Natale Haibo Zeng Paolo Giusto Arkadeb Ghosal Understanding and Using the Controller Area Network Communication Protocol Theory and Practice ^Spri ringer Contents..? 1 The CAN 2.0b Standard 1
Marco Di Natale Haibo Zeng Paolo Giusto Arkadeb Ghosal Understanding and Using the Controller Area Network Communication Protocol Theory and Practice ^Spri ringer Contents..? 1 The CAN 2.0b Standard 1
A Model-based Approach for Conditioning Software to Multi-Core using AUTOSAR
 Model Based Development Tools for Embedded Multi-Core Systems A Model-based Approach for Conditioning Software to Multi-Core using AUTOSAR 9 th AUTOSAR Open Conference in Gothenburg Timing-Architects Embedded
Model Based Development Tools for Embedded Multi-Core Systems A Model-based Approach for Conditioning Software to Multi-Core using AUTOSAR 9 th AUTOSAR Open Conference in Gothenburg Timing-Architects Embedded
A MONITORING CONCEPT FOR AN AUTOMOTIVE DISTRIBUTED NETWORK - THE FLEXRAY EXAMPLE
 A MONITORING CONCEPT FOR AN AUTOMOTIVE DISTRIBUTED NETWORK - THE FLEXRAY EXAMPLE Eric Armengaud, Andreas Steininger Vienna University of Technology Embedded Computing Systems Group E182-2 Treitlstr. 3,
A MONITORING CONCEPT FOR AN AUTOMOTIVE DISTRIBUTED NETWORK - THE FLEXRAY EXAMPLE Eric Armengaud, Andreas Steininger Vienna University of Technology Embedded Computing Systems Group E182-2 Treitlstr. 3,
PRIMEQUEST 400 Series & SQL Server 2005 Technical Whitepaper (November, 2005)
") PRIMEQUEST 400 Series & SQL Server 2005 Technical Whitepaper (November, 2005) Fujitsu Limited PRIMEQUEST 400 Series & SQL Server 2005 Technical White Paper PRIMEQUEST 400 Series Server & SQL Server 2005
PRIMEQUEST 400 Series & SQL Server 2005 Technical Whitepaper (November, 2005) Fujitsu Limited PRIMEQUEST 400 Series & SQL Server 2005 Technical White Paper PRIMEQUEST 400 Series Server & SQL Server 2005
Designing a software framework for automated driving. Dr.-Ing. Sebastian Ohl, 2017 October 12 th
 Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Deterministic Networking Lab
 Lab Course (Preliminary Session) Deterministic Networking Lab M.Sc. Sina Shafaei Prof. Dr.-Ing. Habil. Alois Knoll Winter Semester 2017/2018 What They Have in Common... Audi A8 Roboy TUM Reliable Network
Lab Course (Preliminary Session) Deterministic Networking Lab M.Sc. Sina Shafaei Prof. Dr.-Ing. Habil. Alois Knoll Winter Semester 2017/2018 What They Have in Common... Audi A8 Roboy TUM Reliable Network
Automated Freedom from Interference Analysis for Automotive Software
 Automated Freedom from Interference Analysis for Automotive Software Florian Leitner-Fischer ZF TRW 78315 Radolfzell, Germany Email: florian.leitner-fischer@zf.com Stefan Leue Chair for Software and Systems
Automated Freedom from Interference Analysis for Automotive Software Florian Leitner-Fischer ZF TRW 78315 Radolfzell, Germany Email: florian.leitner-fischer@zf.com Stefan Leue Chair for Software and Systems
Model-Based Design of the Communication System in an Integrated Architecture
 Model-Based Design of the Communication System in an Integrated Architecture R. Obermaisser and B. Huber Vienna University of Technology, Austria email: {ro,huberb}@vmars.tuwien.ac.at Abstract The DECOS
Model-Based Design of the Communication System in an Integrated Architecture R. Obermaisser and B. Huber Vienna University of Technology, Austria email: {ro,huberb}@vmars.tuwien.ac.at Abstract The DECOS
CANoe 6.0. The Professional Development and Test Tool for CAN, LIN, MOST, FlexRay and J1587 TOOLS FOR NETWORKS AND DISTRIBUTED SYSTEMS
 CANoe 6.0 The Professional Development and Test Tool for CAN, LIN, MOST, FlexRay and J1587 CANoe is an all-round tool for the development, testing and analysis of networks and ECUs. It supports the user
CANoe 6.0 The Professional Development and Test Tool for CAN, LIN, MOST, FlexRay and J1587 CANoe is an all-round tool for the development, testing and analysis of networks and ECUs. It supports the user
Adventure s perfect companion.
 Adventure s perfect companion. GS-911wifi (10-pin) GS-911wifi (OBD-II) GS-911usb (OBD-II) Compatible with BMW motorcycles with 10-pin diagnostic ports. D2D (device-to-device) and HEX Cloud enabled. Available
Adventure s perfect companion. GS-911wifi (10-pin) GS-911wifi (OBD-II) GS-911usb (OBD-II) Compatible with BMW motorcycles with 10-pin diagnostic ports. D2D (device-to-device) and HEX Cloud enabled. Available
ODX Process from the Perspective of an Automotive Supplier. Dietmar Natterer, Thomas Ströbele, Dr.-Ing. Franz Krauss ZF Friedrichshafen AG
 ODX Process from the Perspective of an Automotive Supplier Dietmar Natterer, Thomas Ströbele, Dr.-Ing. Franz Krauss ZF Friedrichshafen AG 1 Abstract Vehicle systems, especially the ECU networks, are getting
ODX Process from the Perspective of an Automotive Supplier Dietmar Natterer, Thomas Ströbele, Dr.-Ing. Franz Krauss ZF Friedrichshafen AG 1 Abstract Vehicle systems, especially the ECU networks, are getting
Pushing the limits of CAN - Scheduling frames with offsets provides a major performance boost
 Pushing the limits of CAN - Scheduling frames with offsets provides a major performance boost Nicolas NAVET INRIA / RealTime-at-Work http://www.loria.fr/~nnavet http://www.realtime-at-work.com Nicolas.Navet@loria.fr
Pushing the limits of CAN - Scheduling frames with offsets provides a major performance boost Nicolas NAVET INRIA / RealTime-at-Work http://www.loria.fr/~nnavet http://www.realtime-at-work.com Nicolas.Navet@loria.fr