ROS navigation stack Costmaps Localization Sending goal commands (from rviz) (C)2016 Roi Yehoshua
|
|
|
- Neil Whitehead
- 5 years ago
- Views:
Transcription
1 ROS navigation stack Costmaps Localization Sending goal commands (from rviz)
2 Robot Navigation One of the most basic things that a robot can do is to move around the world. To do this effectively, the robot needs to know where it is and where it should be going This is usually achieved by giving the robot a map of the world, a starting location, and a goal location We ll look at how to make your robot autonomously navigate from one part of the world to another, using the map and the ROS navigation packages
3 ROS Navigation Stack The goal of the navigation stack is to move a robot from one position to another position safely (without crashing or getting lost) It takes in information from the odometry and sensors, and a goal pose and outputs safe velocity commands that are sent to the robot ROS Navigation Introductory Video

4 Overview of ROS Navigation
5 ROS Navigation Stack
6 Navigation Stack Main Components Package/Component map_server gmapping amcl global_planner local_planner move_base Description offers map data as a ROS Service provides laser-based SLAM a probabilistic localization system implementation of a fast global planner for navigation implementations of the Trajectory Rollout and Dynamic Window approaches to local robot navigation links together the global and local planner to accomplish the navigation task
7 Navigation Main Steps Goal AMCL Path Planner move_base /cmd_vel + /odom Base Controller
8 Install Navigation Stack The navigation stack is not part of the standard ROS Indigo installation To install the navigation stack type: $ sudo apt-get install ros-indigo-navigation
9 Navigation Stack Requirements Three main hardware requirements The navigation stack can only handle a differential drive and holonomic wheeled robots It can also do certain things with biped robots, such as localization, as long as the robot does not move sideways A planar laser must be mounted on the mobile base of the robot to create the map and localization Alternatively, you can generate something equivalent to laser scans from other sensors (Kinect for example) Its performance will be best on robots that are nearly square or circular
10 Navigation Planners Our robot will move through the map using two types of navigation global and local The global planner is used to create paths for a goal in the map or a far-off distance The local planner is used to create paths in the nearby distances and avoid obstacles
11 Global Planner NavFn provides a fast interpolated navigation function that creates plans for a mobile base The global plan is computed before the robot starts moving toward the next destination The planner operates on a costmap to find a minimum cost plan from a start point to an end point in a grid, using Dijkstra s algorithm The global planner generates a series of waypoints for the local planner to follow
12 Local Planner Chooses appropriate velocity commands for the robot to traverse the current segment of the global path Combines sensory and odometry data with both global and local cost maps Can recomputethe robot's path on the fly to keep the robot from striking objects yet still allowing it to reach its destination Implements the Trajectory Rollout and Dynamic Window algorithm

13 Trajectory Rollout Algorithm Taken from ROS Wiki
14 Trajectory Rollout Algorithm 1. Discretely sample in the robot's control space (dx,dy,dθ) 2. For each sampled velocity, perform forward simulation from the robot's current state to predict what would happen if the sampled velocity were applied for some (short) period of time 3. Evaluate each trajectory resulting from the forward simulation, using a metric that incorporates characteristics such as: proximity to obstacles, proximity to the goal, proximity to the global path, and speed 4. Discard illegal trajectories (those that collide with obstacles) 5. Pick the highest-scoring trajectory and send the associated velocity to the mobile base 6. Rinse and repeat
15 Local Planner Parameters The file base_local_planner.yaml contains a large number of ROS Parameters that can be set to customize the behavior of the base local planner Grouped into several categories: robot configuration goal tolerance forward simulation trajectory scoring oscillation prevention global plan
16 Map Grid In order to score trajectories efficiently, a Map Grid is used. For each control cycle, a grid is created around the robot (the size of the local costmap), and the global path is mapped onto this area. This means certain of the grid cells will be marked with distance 0 to a path point, and distance 0 to the goal. A propagation algorithm then efficiently marks all other cells with their Manhattan distance to the closest of the points marked with zero. (C)2013 Roi Yehoshua
17 Oscillation Suppression Oscillation occur when in either of the x, y, or theta dimensions, positive and negative values are chosen consecutively. To prevent oscillations, when the robot moves in any direction, for the next cycles the opposite direction is marked invalid, until the robot has moved beyond a certain distance from the position where the flag was set. (C)2013 Roi Yehoshua
18 Scoring Trajectories
19 Costmap A data structure that represents places that are safe for the robot to be in a grid of cells It is based on the occupancy grid map of the environment and user specified inflation radius There are two types of costmaps in ROS: Global costmap is used for global navigation Local costmap is used for local navigation Each cell in the costmaphas an integer value in the range [0 (FREE_SPACE), 255 (UNKNOWN)] Managed by the costmap_2d package

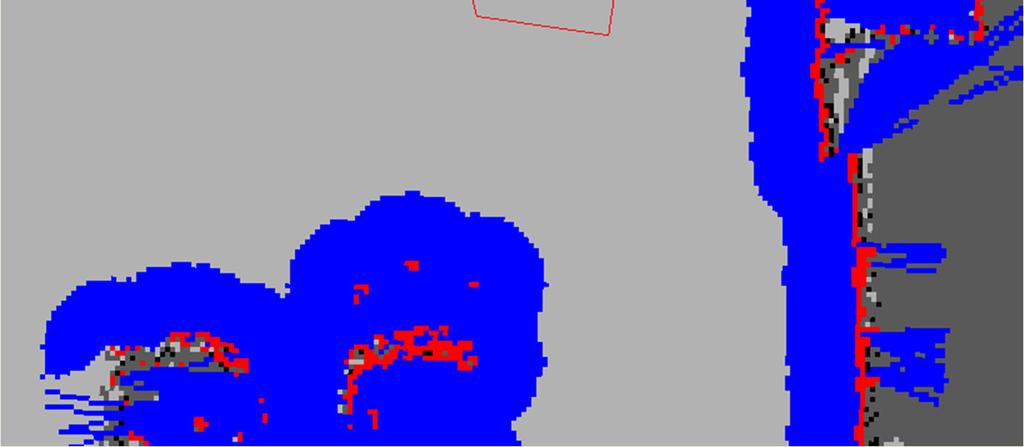
20 Costmap Example Taken from ROS Wiki
21 Inflation Inflation is the process of propagating cost values out from occupied cells that decrease with distance
22 Map Updates The costmapperforms map update cycles at the rate specified by theupdate_frequency parameter In each cycle: sensor data comes in marking and clearing operations are perfomed in the underlying occupancy structure of the costmap this structure is projected into the costmap where the appropriate cost values are assigned as described above obstacle inflation is performed on each cell with a LETHAL_OBSTACLE value This consists of propagating cost values outwards from each occupied cell out to a user-specified inflation radius
23 Costmap Parameters Files Configuration of the costmaps consists of three files: costmap_common_params.yaml global_costmap_params.yaml local_costmap_params.yaml
24 Navigasyon Video
25 Localization Localization is the problem of estimating the pose of the robot relative to a map Localization is not terribly sensitive to the exact placement of objects so it can handle small changes to the locations of objects ROS uses the amcl package for localization (C)2015 Roi Yehoshua
26 AMCL amcl is a probabilistic localization system for a robot moving in 2D It implements the adaptive Monte Carlo localization approach, which uses a particle filter to track the pose of a robot against a known map The algorithm and its parameters are described in the book Probabilistic Robotics by Thrun, Burgard, and Fox ( Currently amcl works only with laser scans However, it can be extended to work with other sensors (C)2015 Roi Yehoshua
27 AMCL amcl takes in a laser-based map, laser scans, and transform messages, and outputs pose estimates Subscribed topics: scan Laser scans tf Transforms initialpose Mean and covariance with which to (re-) initialize the particle filter map the map used for laser-based localization Published topics: amcl_pose Robot's estimated pose in the map, with covariance. Particlecloud The set of pose estimates being maintained by the filter (C)2015 Roi Yehoshua
28 move_base The move_base package lets you move a robot to desired positions using the navigation stack The move_base node links together a global and local planner to accomplish its navigation task It may optionally perform recovery behaviors when the robot perceives itself as stuck
29 P3AT Navigation Navigation package includes demos of map building using gmapping and localization with amcl, while running the navigation stack In nav_params subdirectory it contains configuration files for P3AT navigation Sizin uygulamanızda nav_params klasöründeki parametreler değiştirilerek testler yapılacak.
30 Navigation Configuration Files Configuration File global_planner_params.yaml navfn_global_planner_params.ya ml dwa_local_planner_params.yaml costmap_common_params.yaml global_costmap_params.yaml local_costmap_params.yaml move_base_params.yaml amcl.launch.xml Description global planner configuration navfn configuration local planner configuration costmap configuration files move base configuration amcl configuration
31 rviz allows you to: rviz with Navigation Stack Provide an approximate location of the robot (when starting up, the robot doesn t know where it is) Send goals to the navigation stack Display all the visualization information relevant to the navigation (planned path, costmap, etc.)
32 rviz with Navigation Stack
33 Localize the Robot When starting up the robot doesn't know where it is For example, let s move the robot in Gazebo to (-1,-2) Now to provide it its approximate location on the map: Click the "2D Pose Estimate" button Click on the map where the robot approximately is and drag in the direction the robot is pointing You will see a collection of arrows which are hypotheses of the position of the robot The laser scan should line up approximately with the walls in the map If things don't line up well you can repeat the procedure

34 Localize the Robot
35 Localize the Robot

36 Localize the Robot

37 Localize the Robot You can change the current view (on right panel):
38 Particle Cloud in rviz The Particle Cloud display shows the particle cloud used by the robot's localization system The spread of the cloud represents the localization system's uncertainty about the robot's pose As the robot moves about the environment, this cloud should shrink in size as additional scan data allows amcl to refine its estimate of the robot's position and orientation To watch the particle cloud in rviz: Click Add Display and choose Pose Array Set topic name to /particlecloud
39 Send a Navigation Goal With the robot localized, it can then autonomously plan through the environment To send a goal: Click the "2D NavGoal" button Click on the map where you want the robot to drive and drag in the direction where it should be pointing at the end If you want to stop the robot before it reaches it's goal, send it a goal at it's current location

40 Send a Navigation Goal

41 Robot Moves to Destination

42 Final Pose

43 Final Pose In Gazebo
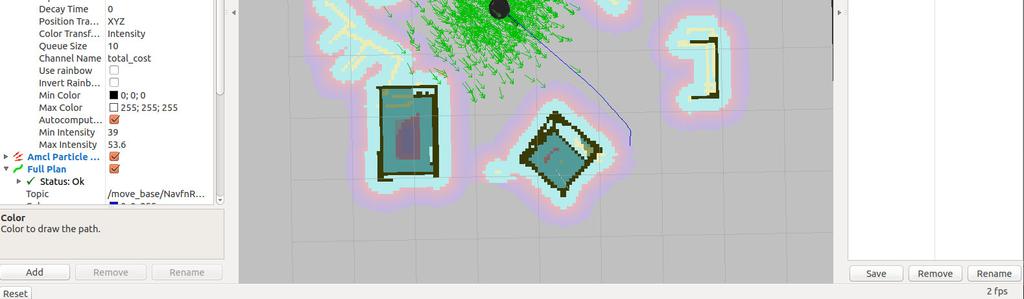
44 Navigation Plans in rviz NavFn Plan Displays the full plan for the robot computed by the global planner Topic: /move_base_node/navfnros/plan Global Plan Shows the portion of the global plan that the local planner is currently pursuing Topic: /move_base_node/trajectoryplannerros/global_plan Local Plan Shows the trajectory associated with the velocity commands currently being commanded to the base by the local planner Topic: /move_base_node/trajectoryplannerros/local_plan

45 Navigation Plans in rviz NavFn Plan Local Plan Global Plan
Teaching Assistant: Roi Yehoshua
 Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Agenda ROS navigation stack Navigation planners Costmaps Running ROS navigation with Stage and rviz Sending goal commands ROS Navigation Stack http://wiki.ros.org/navigation
Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Agenda ROS navigation stack Navigation planners Costmaps Running ROS navigation with Stage and rviz Sending goal commands ROS Navigation Stack http://wiki.ros.org/navigation
ROBOT NAVIGATION ROBOTICS
 ROBOT NAVIGATION ROBOTICS OUR IMPLEMENTATION /joy joy_cmd /cmd_joy / /velocity ROBOT joy_node /odom JOYPAD pose OUR IMPLEMENTATION /mode /joy joy_cmd /cmd_joy mux / /velocity /cmd_auto ROBOT joy_node planner
ROBOT NAVIGATION ROBOTICS OUR IMPLEMENTATION /joy joy_cmd /cmd_joy / /velocity ROBOT joy_node /odom JOYPAD pose OUR IMPLEMENTATION /mode /joy joy_cmd /cmd_joy mux / /velocity /cmd_auto ROBOT joy_node planner
Individual Lab Report #6. Pratik Chatrath. Team A / Team Avengers. Teammates: Tushar Agrawal, Sean Bryan. January 28, 2016
 Individual Lab Report #6 Pratik Chatrath Team A / Team Avengers Teammates: Tushar Agrawal, Sean Bryan January 28, 2016 I. Individual Progress Overall in the last semester, I worked on developing obstacle
Individual Lab Report #6 Pratik Chatrath Team A / Team Avengers Teammates: Tushar Agrawal, Sean Bryan January 28, 2016 I. Individual Progress Overall in the last semester, I worked on developing obstacle
RoboCup Rescue Summer School Navigation Tutorial
 RoboCup Rescue Summer School 2012 Institute for Software Technology, Graz University of Technology, Austria 1 Literature Choset, Lynch, Hutchinson, Kantor, Burgard, Kavraki and Thrun. Principle of Robot
RoboCup Rescue Summer School 2012 Institute for Software Technology, Graz University of Technology, Austria 1 Literature Choset, Lynch, Hutchinson, Kantor, Burgard, Kavraki and Thrun. Principle of Robot
Using the ikart mobile platform
 Using the mobile platform Marco Randazzo Sestri Levante, July 23th, 2012 General description A holonomic mobile base for icub: Omnidirectional movement (six omnidirectional wheels) Integrates an high-performance
Using the mobile platform Marco Randazzo Sestri Levante, July 23th, 2012 General description A holonomic mobile base for icub: Omnidirectional movement (six omnidirectional wheels) Integrates an high-performance
ROS Navigation Tuning Guide
 ROS Navigation Tuning Guide Kaiyu Zheng September 2, 2016 Introduction The ROS navigation stack is powerful for mobile robots to move from place to place reliably. The job of navigation stack is to produce
ROS Navigation Tuning Guide Kaiyu Zheng September 2, 2016 Introduction The ROS navigation stack is powerful for mobile robots to move from place to place reliably. The job of navigation stack is to produce
mmwave sensors in robotics: technical deep dive
 mmwave sensors in robotics: technical deep dive 10 Detailed agenda mmwave Sensing in Robotics how do robots see using mmwave? Overview and market differentiation mmwave Demo Visualizer ROS (Robot OS) Point
mmwave sensors in robotics: technical deep dive 10 Detailed agenda mmwave Sensing in Robotics how do robots see using mmwave? Overview and market differentiation mmwave Demo Visualizer ROS (Robot OS) Point
Visual Navigation for Flying Robots. Motion Planning
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
F1/10 th Autonomous Racing. Localization. Nischal K N
 F1/10 th Autonomous Racing Localization Nischal K N System Overview Mapping Hector Mapping Localization Path Planning Control System Overview Mapping Hector Mapping Localization Adaptive Monte Carlo Localization
F1/10 th Autonomous Racing Localization Nischal K N System Overview Mapping Hector Mapping Localization Path Planning Control System Overview Mapping Hector Mapping Localization Adaptive Monte Carlo Localization
Rigid Body Transformations
 F1/10 th Racing Rigid Body Transformations (Or How Different sensors see the same world) By, Paritosh Kelkar Mapping the surroundings Specify destination and generate path to goal The colored cells represent
F1/10 th Racing Rigid Body Transformations (Or How Different sensors see the same world) By, Paritosh Kelkar Mapping the surroundings Specify destination and generate path to goal The colored cells represent
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Autonomous Navigation of Humanoid Using Kinect. Harshad Sawhney Samyak Daga 11633
 Autonomous Navigation of Humanoid Using Kinect Harshad Sawhney 11297 Samyak Daga 11633 Motivation Humanoid Space Missions http://www.buquad.com Motivation Disaster Recovery Operations http://www.designnews.com
Autonomous Navigation of Humanoid Using Kinect Harshad Sawhney 11297 Samyak Daga 11633 Motivation Humanoid Space Missions http://www.buquad.com Motivation Disaster Recovery Operations http://www.designnews.com
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Monte Carlo Localization using Dynamically Expanding Occupancy Grids. Karan M. Gupta
 1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
Single robot coverage of the Piazza Bra map Artificial Intelligence project (2011/2012)
") Single robot coverage of the Piazza Bra map Artificial Intelligence project (2011/2012) Fabio Signorini Abstract This project aimed to study the open source ROS framework in order to perform a single-robot
Single robot coverage of the Piazza Bra map Artificial Intelligence project (2011/2012) Fabio Signorini Abstract This project aimed to study the open source ROS framework in order to perform a single-robot
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Today MAPS AND MAPPING. Features. process of creating maps. More likely features are things that can be extracted from images:
 MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
MAPS AND MAPPING Features In the first class we said that navigation begins with what the robot can see. There are several forms this might take, but it will depend on: What sensors the robot has What
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
NERC Gazebo simulation implementation
 NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Racing Robot Path Planning: Algorithmic Design and Experimental Validation
 Athens University of Economics and Business Degree Thesis Semester 8, 2014 Racing Robot Path Planning: Algorithmic Design and Experimental Validation Giorgos Stavrinos 3100171 Supervisors: S. Konstantopoulos,
Athens University of Economics and Business Degree Thesis Semester 8, 2014 Racing Robot Path Planning: Algorithmic Design and Experimental Validation Giorgos Stavrinos 3100171 Supervisors: S. Konstantopoulos,
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Cognitive Robotics Robot Motion Planning Matteo Matteucci
 Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Laser, Kinect, Gmapping, Localization, PathPlanning
 Soso s knowledge Laser, Kinect, Gmapping, Localization, PathPlanning Faculty of Information Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz 99.99.9999 Sensors Stereo
Soso s knowledge Laser, Kinect, Gmapping, Localization, PathPlanning Faculty of Information Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz 99.99.9999 Sensors Stereo
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Final Project Report: Mobile Pick and Place
 Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Team Description Paper Team AutonOHM
 Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
3D Collision Avoidance for Navigation in Unstructured Environments
 3D Collision Avoidance for Navigation in Unstructured Environments Armin Hornung Humanoid Robots Lab, University of Freiburg May 5, 2011 Motivation Personal robots are to operate in arbitrary complex environments:
3D Collision Avoidance for Navigation in Unstructured Environments Armin Hornung Humanoid Robots Lab, University of Freiburg May 5, 2011 Motivation Personal robots are to operate in arbitrary complex environments:
Kaijen Hsiao. Part A: Topics of Fascination
 Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS
 Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Teaching Assistant: Roi Yehoshua
 Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Agenda Mapping in ROS ROS visualization tool (rviz) ROS services Why Mapping? Building maps is one of the fundamental problems in mobile robotics Maps
Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Agenda Mapping in ROS ROS visualization tool (rviz) ROS services Why Mapping? Building maps is one of the fundamental problems in mobile robotics Maps
Robotics. Chapter 25-b. Chapter 25-b 1
 Robotics Chapter 25-b Chapter 25-b 1 Particle Filtering Particle filtering uses a population of particles (each particle is a state estimate) to localize a robot s position. This is called Monte Carlo
Robotics Chapter 25-b Chapter 25-b 1 Particle Filtering Particle filtering uses a population of particles (each particle is a state estimate) to localize a robot s position. This is called Monte Carlo
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Proceedings of the 2016 Winter Simulation Conference T. M. K. Roeder, P. I. Frazier, R. Szechtman, E. Zhou, T. Huschka, and S. E. Chick, eds.
 Proceedings of the 2016 Winter Simulation Conference T. M. K. Roeder, P. I. Frazier, R. Szechtman, E. Zhou, T. Huschka, and S. E. Chick, eds. SIMULATION RESULTS FOR LOCALIZATION AND MAPPING ALGORITHMS
Proceedings of the 2016 Winter Simulation Conference T. M. K. Roeder, P. I. Frazier, R. Szechtman, E. Zhou, T. Huschka, and S. E. Chick, eds. SIMULATION RESULTS FOR LOCALIZATION AND MAPPING ALGORITHMS
Mapping, Localization and Navigation Improvements by Using Manipulated Floor Plan and ROS-Based Mobile Robot Parameters
 Mapping, Localization and Navigation Improvements by Using Manipulated Floor Plan and ROS-Based Mobile Robot Parameters Petri Oksa, Pekka Loula and Erkki Castrén Telecommunications Research Center Tampere
Mapping, Localization and Navigation Improvements by Using Manipulated Floor Plan and ROS-Based Mobile Robot Parameters Petri Oksa, Pekka Loula and Erkki Castrén Telecommunications Research Center Tampere
Matching Evaluation of 2D Laser Scan Points using Observed Probability in Unstable Measurement Environment
 Matching Evaluation of D Laser Scan Points using Observed Probability in Unstable Measurement Environment Taichi Yamada, and Akihisa Ohya Abstract In the real environment such as urban areas sidewalk,
Matching Evaluation of D Laser Scan Points using Observed Probability in Unstable Measurement Environment Taichi Yamada, and Akihisa Ohya Abstract In the real environment such as urban areas sidewalk,
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Vision-Only Autonomous Navigation Using Topometric Maps
 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Vision-Only Autonomous Navigation Using Topometric Maps Feras Dayoub, Timothy Morris, Ben
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Vision-Only Autonomous Navigation Using Topometric Maps Feras Dayoub, Timothy Morris, Ben
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Building Reliable 2D Maps from 3D Features
 Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
AUTONOMOUS SYSTEMS. LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping
 AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
Lecture: Autonomous micro aerial vehicles
 Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
A ROS REACTIVE NAVIGATION SYSTEM FOR GROUND VEHICLES BASED ON TP-SPACE TRANSFORMATIONS
 A ROS REACTIVE NAVIGATION SYSTEM FOR GROUND VEHICLES BASED ON TP-SPACE TRANSFORMATIONS E. Rodríguez, J.L. Blanco, J.L. Torres, J.C. Moreno, A. Giménez, J.L. Guzmán Universidad de Almería Ctra. Sacramento
A ROS REACTIVE NAVIGATION SYSTEM FOR GROUND VEHICLES BASED ON TP-SPACE TRANSFORMATIONS E. Rodríguez, J.L. Blanco, J.L. Torres, J.C. Moreno, A. Giménez, J.L. Guzmán Universidad de Almería Ctra. Sacramento
CANAL FOLLOWING USING AR DRONE IN SIMULATION
 CANAL FOLLOWING USING AR DRONE IN SIMULATION ENVIRONMENT Ali Ahmad, Ahmad Aneeque Khalid Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060006, 14060019}@lums.edu.pk
CANAL FOLLOWING USING AR DRONE IN SIMULATION ENVIRONMENT Ali Ahmad, Ahmad Aneeque Khalid Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060006, 14060019}@lums.edu.pk
REPORT OF ROBOTICS, VOL. 6, NO. 1, JANUARY Full Speed Jackal
 REPORT OF ROBOTICS, VOL. 6, NO. 1, JANUARY 2017 1 Full Speed Jackal A project of the 2016 Robotics Course of the School of Information Science and Technology (SIST) of ShanghaiTech University Instructor:
REPORT OF ROBOTICS, VOL. 6, NO. 1, JANUARY 2017 1 Full Speed Jackal A project of the 2016 Robotics Course of the School of Information Science and Technology (SIST) of ShanghaiTech University Instructor:
Particle Filter Localization
 E190Q Autonomous Mobile Robots Lab 4 Particle Filter Localization INTRODUCTION Determining a robots position in a global coordinate frame is one of the most important and difficult problems to overcome
E190Q Autonomous Mobile Robots Lab 4 Particle Filter Localization INTRODUCTION Determining a robots position in a global coordinate frame is one of the most important and difficult problems to overcome
Localization, Mapping and Exploration with Multiple Robots. Dr. Daisy Tang
 Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS
 Improved Laser-based Navigation for Mobile Robots 79 SDU International Journal of Technologic Sciences pp. 79-92 Computer Technology IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS Muhammad AWAIS Abstract
Improved Laser-based Navigation for Mobile Robots 79 SDU International Journal of Technologic Sciences pp. 79-92 Computer Technology IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS Muhammad AWAIS Abstract
Implementation of Odometry with EKF for Localization of Hector SLAM Method
 Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
Long-Term Online Multi-Session Graph-Based SPLAM with Memory Management
 This is a post-peer-review, pre-copyedit version of an article published in Autonomous Robots. The final authenticated version is available online at: http://dx.doi.org/10.1007/s10514-017-9682-5 Long-Term
This is a post-peer-review, pre-copyedit version of an article published in Autonomous Robots. The final authenticated version is available online at: http://dx.doi.org/10.1007/s10514-017-9682-5 Long-Term
Artificial Intelligence for Robotics: A Brief Summary
 Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Investigating Simultaneous Localization and Mapping for AGV systems
 Investigating Simultaneous Localization and Mapping for AGV systems With open-source modules available in ROS Master s thesis in Computer Systems and Networks ALBIN PÅLSSON MARKUS SMEDBERG Department of
Investigating Simultaneous Localization and Mapping for AGV systems With open-source modules available in ROS Master s thesis in Computer Systems and Networks ALBIN PÅLSSON MARKUS SMEDBERG Department of
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
PROMETHEUS: WPI s 2012 ENTRY TO IGVC. Authors: Craig DeMello Robotics Engineering. Eric Fitting. Taskin Padir. Samson King.
 PROMETHEUS: WPI s 2012 ENTRY TO IGVC Authors: Craig DeMello Robotics Engineering Eric Fitting Robotics Engineering Computer Science Samson King Robotics Engineering Greg McConnell Robotics Engineering
PROMETHEUS: WPI s 2012 ENTRY TO IGVC Authors: Craig DeMello Robotics Engineering Eric Fitting Robotics Engineering Computer Science Samson King Robotics Engineering Greg McConnell Robotics Engineering
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Multi-robot collision avoidance with localization uncertainty
 Multi-robot collision avoidance with localization uncertainty Daniel Hennes Maastricht University P.O. Box 66, 6MD Maastricht, The Netherlands daniel.hennes@gmail.com Daniel Claes Maastricht University
Multi-robot collision avoidance with localization uncertainty Daniel Hennes Maastricht University P.O. Box 66, 6MD Maastricht, The Netherlands daniel.hennes@gmail.com Daniel Claes Maastricht University
Autonomous Mobile Robots, Chapter 6 Planning and Navigation Where am I going? How do I get there? Localization. Cognition. Real World Environment
 Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Planning for Simultaneous Localization and Mapping using Topological Information
 Planning for Simultaneous Localization and Mapping using Topological Information Rafael Gonçalves Colares e Luiz Chaimowicz Abstract This paper presents a novel approach for augmenting simultaneous localization
Planning for Simultaneous Localization and Mapping using Topological Information Rafael Gonçalves Colares e Luiz Chaimowicz Abstract This paper presents a novel approach for augmenting simultaneous localization
Introduction to Mobile Robotics Path Planning and Collision Avoidance
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Introduction to Mobile Robotics Techniques for 3D Mapping
 Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Robotic exploration for mapping and change detection
 Masterarbeit Sebastian Gangl Robotic exploration for mapping and change detection Robotische Exploration zur Kartierung und Änderungsdetektion Erstprüfer: apl. Prof. Dr.-Ing. Claus Brenner Zweitprüfer:
Masterarbeit Sebastian Gangl Robotic exploration for mapping and change detection Robotische Exploration zur Kartierung und Änderungsdetektion Erstprüfer: apl. Prof. Dr.-Ing. Claus Brenner Zweitprüfer:
Introduction to the Robot Operating System (ROS)
") - Lisboa Introduction to Robotics 2018/2019 Introduction to the Robot Operating System (ROS) Rodrigo Ventura Instituto Superior Técnico, Universidade de Lisboa rodrigo.ventura@isr.tecnico.ulisboa.pt What
- Lisboa Introduction to Robotics 2018/2019 Introduction to the Robot Operating System (ROS) Rodrigo Ventura Instituto Superior Técnico, Universidade de Lisboa rodrigo.ventura@isr.tecnico.ulisboa.pt What
CS 309: Autonomous Intelligent Robotics FRI I. Lecture 18: Coordinate Frames TF2 Alvar. Instructor: Justin Hart
 CS 309: Autonomous Intelligent Robotics FRI I Lecture 18: Coordinate Frames TF2 Alvar Instructor: Justin Hart http://justinhart.net/teaching/2018_spring_cs309/ A couple of quick notes Homework 4 Due March
CS 309: Autonomous Intelligent Robotics FRI I Lecture 18: Coordinate Frames TF2 Alvar Instructor: Justin Hart http://justinhart.net/teaching/2018_spring_cs309/ A couple of quick notes Homework 4 Due March
Set up and Foundation of the Husky
 Set up and Foundation of the Husky Marisa Warner, Jeremy Gottlieb, Gabriel Elkaim Worcester Polytechnic Institute University of California, Santa Cruz Abstract Clearpath s Husky A200 is an unmanned ground
Set up and Foundation of the Husky Marisa Warner, Jeremy Gottlieb, Gabriel Elkaim Worcester Polytechnic Institute University of California, Santa Cruz Abstract Clearpath s Husky A200 is an unmanned ground
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Introduction to Mobile Robotics Path Planning and Collision Avoidance. Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING
 Inženýrská MECHANIKA, roč. 15, 2008, č. 5, s. 337 344 337 DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING Jiří Krejsa, Stanislav Věchet* The paper presents Potential-Based
Inženýrská MECHANIKA, roč. 15, 2008, č. 5, s. 337 344 337 DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING Jiří Krejsa, Stanislav Věchet* The paper presents Potential-Based
Autonomous Navigation of Nao using Kinect CS365 : Project Report
 Autonomous Navigation of Nao using Kinect CS365 : Project Report Samyak Daga Harshad Sawhney 11633 11297 samyakd@iitk.ac.in harshads@iitk.ac.in Dept. of CSE Dept. of CSE Indian Institute of Technology,
Autonomous Navigation of Nao using Kinect CS365 : Project Report Samyak Daga Harshad Sawhney 11633 11297 samyakd@iitk.ac.in harshads@iitk.ac.in Dept. of CSE Dept. of CSE Indian Institute of Technology,
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Introduction to robot algorithms CSE 410/510
 Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
Dude, Where s My Robot? A Localization Challenge for Undergraduate Robotics
 Proceedings of the Seventh Symposium on Educational Advances in Artificial Intelligence (EAAI-17) Dude, Where s My Robot? A Localization Challenge for Undergraduate Robotics Paul Ruvolo Paul.Ruvolo@olin.edu
Proceedings of the Seventh Symposium on Educational Advances in Artificial Intelligence (EAAI-17) Dude, Where s My Robot? A Localization Challenge for Undergraduate Robotics Paul Ruvolo Paul.Ruvolo@olin.edu
Managing a Fleet of Autonomous Mobile Robots (AMR) using Cloud Robotics Platform
 using Cloud Robotics Platform") 1 Managing a Fleet of Autonomous Mobile Robots (AMR) using Cloud Robotics Platform Aniruddha Singhal, Nishant Kejriwal, Prasun Pallav, Soumyadeep Choudhury, Rajesh Sinha and Swagat Kumar arxiv:1706.08931v1
1 Managing a Fleet of Autonomous Mobile Robots (AMR) using Cloud Robotics Platform Aniruddha Singhal, Nishant Kejriwal, Prasun Pallav, Soumyadeep Choudhury, Rajesh Sinha and Swagat Kumar arxiv:1706.08931v1
COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS. Mike Peasgood John McPhee Christopher Clark
 COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS Mike Peasgood John McPhee Christopher Clark Lab for Intelligent and Autonomous Robotics, Department of Mechanical Engineering, University
COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS Mike Peasgood John McPhee Christopher Clark Lab for Intelligent and Autonomous Robotics, Department of Mechanical Engineering, University
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
EKF Localization and EKF SLAM incorporating prior information
 EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
LAIR. UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology
 UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology COS 402: Artificial Intelligence - Sept. 2011 Christopher M. Clark Outline! Past Projects! Maltese Cistern Mapping!
UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology COS 402: Artificial Intelligence - Sept. 2011 Christopher M. Clark Outline! Past Projects! Maltese Cistern Mapping!