Ulrik Söderström 17 Jan Image Processing. Introduction
|
|
|
- Cornelius Jones
- 5 years ago
- Views:
Transcription
1 Ulrik Söderström 17 Jan 2017 Image Processing Introduction
2 Image Processsing Typical goals: Improve images for human interpretation Image processing Processing of images for machine perception Image analysis Dealing with images for storage and communication (compression) Image handling 2
3 Image processing steps Low-level Primitive operations (filtering, noise reduction) Both input and output are images Mid-level Segmentation, description, recognition Input. images, output. image attributes High-level Making sense of the recognized objects, (like vision) 3
4 Course outline Lectures Spatial and Frequency domain, Restoration, Compression, Morphological Image Processing, Representation, Description Practical work 3 Labs Project (extensive lab) Written exam 4
5 Grading 3,4,5 Lab exercises ~ 30% Project ~ 30% Written exam ~ 40% 5
6 Images An image is a 2-D function f(x, y) x and y - spatial coordinates f - amplitude (intensity, graylevel) at a point with coordinates (x, y) All values finite and discrete - digital image Digital image processing - computers involved Each value - pixel (picture element) 6
7 Image creation Observation of energy Electromagnetic (EM) radiation most common Human vision is limited to a narrow band Sensors have higher capacities The whole EM spectrum + other energies 7

8 Photons Photon - an amount of energy No mass Travelling at the speed of light Different frequencies v and wavelengths λ c= speed of light, 3x10 8 Energy of a photon h = plancks constant 8

9 The EM spectrum 9


10 Ultraviolet (UV) light Flourescence images of corn UV light from the same star as previous 10

11 Visible light By far the most common 11

12 Visible light Microscopic images of a CD, cholesterol, and a microprocessor 12

13 Infrared light America (north and south) 13

14 Combined spectra Different bands give totally different images of the same object Astronomic images of the same region but in different bands 14
 Medical images")
15 Other energies Sound High frequency, ultrasound (1-5 MHz) Medical images 15

16 Other energies Electron microscopy 16

17 Computer generated images No need for a physical energy source Fractals 3-D computer models 17
18 Foundations All imaging systems replicates the human visual system 18
19 Unknown functionalities 19
20 Unknown functionalities 20

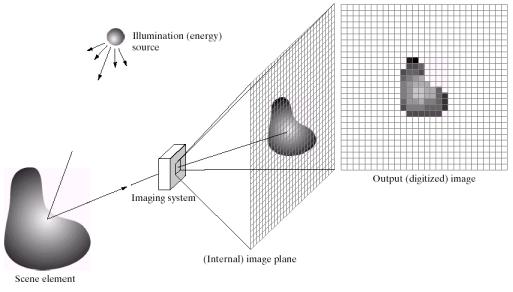
21 Image aquisition Sensor to measure energy In digital cameras - CCD arrays Integrate over the sensor, values proportional to the number of photons hitting the surfaces 21
22 Image aquisition 22
23 Image formation An image f(x, y) When generated from a physical process: 0 < f(x, y) < 0 L min f(x, y) L max < (monocromatic image) The interval [L min, L max ] - grayscale of the image 23
24 Image formation Two components - illumination and reflectance f(x, y) = i(x, y) r(x, y) 0 < i(x, y) <, illumination component Determined by illumination source 0 < r(x, y) < 1, reflectance component Determined by object charasteristics Transmissivity is used instead of reflectivity in the case of illumination passing through objects, eg X-rays 24
25 Sampling and quantization The output of a sensor is in most cases a continuous voltage waveform Needs to be digitized Sampling - digitizing the coordinate values Usually M = 2 m steps in x-direction and N = 2 n steps in y-direction Quantization. digitizing the amplitude values L = 2 k gray values Image (storage) size = M N k/8 bytes 25
26 Sampling and quantization 26

27 Sampling and quantization 27
28 Sampling and quantization A square grid is the most common (the only one in the book) 28
29 Image representation Most common convention f(x, y) = Matrix representation of image values 29

30 Image representation Surface color Intensities Gray-level, Color information 30

31 Resolution Spatial resolution - determined by the Sampling Tightness in pixels Sampling distance The human eyes cannot detect resolution higher/lower than a threshold A computer might see more information 31

32 Spatial resolution 32

33 Acceptable resolution? Isopreference subjectively perceived quality of the images Many details- few gray levels needed 33
34 Sampling Sampling theorem If the distance between sampling points is larger than the smallest objects we want to capture, we get problems with aliasing Sampling introduces new frequencies The sampling frequency must be at least twice the highest frequency in the image Blur the image before sampling 34

35 Moiré patterns Moiré pattern effects occurs when periodic patterns break up. E.g. scanned images from printed pages with periodic dots 35
36 Zooming and shrinking Resampling an already digital image Resize the image grid Simplest way to enlarge an image to twice its size - duplicate all pixels (nearest neighbor interpolation) Better results if more neighbors are taken into account (e.g. bilinear interpolation, using the four nearest neighbors) 36
37 Zooming and shrinking 37

38 Zooming 38
39 Pixel relationships Neighbors of a pixel p with coordinates (x, y) Four horizontal and vertical neighbors (x+1, y), (x-1, y), (x, y+1), and (x, y-1) N 4 (p), the 4-neighbors of p Four diagonal neighbors (x+1, y+1), (x+1, y-1), (x-1, y+1), and (x-1, y-1) N D (p) Combined, N 4 (p) N D (p) (union) N 8 (p), the 8-neighbors of p 39
40 Adjacency Two pixels that are neighbors are adjacent 4-adjacency, two pixels p and q with values V are 4-adjacent if q is in the set N 4 (p) 8-adjacency, two pixels p and q with values V are 8-adjacent if q is in the set N 8 (p) 40
41 Distance measures p has coordinates (x, y), q has (s, t) Distances between p and q Euclidean distance (the most natural in R 2 ) D e (p, q) = [(x-s) 2 + (y-t)2] ½ x D 4 distance, - city block distance D 4 (p, q) = x-s + y-t The 4-neighbors of (x, y) have D 4 = x
42 Distance measures D 8 distance, - chessboard distance D 8 (p, q) = max( x-s, y-t ) The 8-neighbors of (x, y) have D 8 = 1 D m distance x The number of jumps between p and q along the path that connects them, depending on the values of the pixels on the path and their neighbors. 42
43 Operations on a pixel basis It is common to carry out arithmetic operations on images E.g. dividing one image by another - not a defined matrix operation Pixel wise operations Images must be of equal size 43
44 Linear and nonlinear operations An operator H whose input and output are images is linear if H(af + bg) = ah(f) + bh(g) for any images f and g and any scalars a and b E.g. summing K images Computing the absolute value of a function is an example of a nonlinear operation 44
UNIT-2 IMAGE REPRESENTATION IMAGE REPRESENTATION IMAGE SENSORS IMAGE SENSORS- FLEX CIRCUIT ASSEMBLY
 18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
Digital Image Processing
 Digital Image Processing Lecture # 4 Digital Image Fundamentals - II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
Digital Image Processing Lecture # 4 Digital Image Fundamentals - II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
CS 548: Computer Vision and Image Processing Digital Image Basics. Spring 2016 Dr. Michael J. Reale
 CS 548: Computer Vision and Image Processing Digital Image Basics Spring 2016 Dr. Michael J. Reale HUMAN VISION Introduction In Computer Vision, we are ultimately trying to equal (or surpass) the human
CS 548: Computer Vision and Image Processing Digital Image Basics Spring 2016 Dr. Michael J. Reale HUMAN VISION Introduction In Computer Vision, we are ultimately trying to equal (or surpass) the human
CP467 Image Processing and Pattern Recognition
 CP467 Image Processing and Pattern Recognition Instructor: Hongbing Fan Introduction About DIP & PR About this course Lecture 1: an overview of DIP DIP&PR show What is Digital Image? We use digital image
CP467 Image Processing and Pattern Recognition Instructor: Hongbing Fan Introduction About DIP & PR About this course Lecture 1: an overview of DIP DIP&PR show What is Digital Image? We use digital image
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
Lecture 1 Introduction & Fundamentals
 Digital Image Processing Lecture 1 Introduction & Fundamentals Presented By: Diwakar Yagyasen Sr. Lecturer CS&E, BBDNITM, Lucknow What is an image? a representation, likeness, or imitation of an object
Digital Image Processing Lecture 1 Introduction & Fundamentals Presented By: Diwakar Yagyasen Sr. Lecturer CS&E, BBDNITM, Lucknow What is an image? a representation, likeness, or imitation of an object
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Computer Vision. The image formation process
 Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
IMAGING. Images are stored by capturing the binary data using some electronic devices (SENSORS)
") IMAGING Film photography Digital photography Images are stored by capturing the binary data using some electronic devices (SENSORS) Sensors: Charge Coupled Device (CCD) Photo multiplier tube (PMT) The
IMAGING Film photography Digital photography Images are stored by capturing the binary data using some electronic devices (SENSORS) Sensors: Charge Coupled Device (CCD) Photo multiplier tube (PMT) The
1/12/2009. Image Elements (Pixels) Image Elements (Pixels) Digital Image. Digital Image =...
 Image Elements (Pixels) Digital Image. Digital Image =...") PAM3012 Digital Image Processing for Radiographers Image Sampling & Quantization In this lecture Definitions of Spatial l & Gray-level l resolution Perceived Image Quality & Resolution Aliasing & Moire
PAM3012 Digital Image Processing for Radiographers Image Sampling & Quantization In this lecture Definitions of Spatial l & Gray-level l resolution Perceived Image Quality & Resolution Aliasing & Moire
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
Motivation. Gray Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation. Intensity Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
ECE 178: Introduction (contd.)
") ECE 178: Introduction (contd.) Lecture Notes #2: January 9, 2002 Section 2.4 sampling and quantization Section 2.5 relationship between pixels, connectivity analysis Jan 9 W03/Lecture 2 1 Announcements
ECE 178: Introduction (contd.) Lecture Notes #2: January 9, 2002 Section 2.4 sampling and quantization Section 2.5 relationship between pixels, connectivity analysis Jan 9 W03/Lecture 2 1 Announcements
Computer Assisted Image Analysis TF 3p and MN1 5p Lecture 1, (GW 1, )
") Centre for Image Analysis Computer Assisted Image Analysis TF p and MN 5p Lecture, 422 (GW, 2.-2.4) 2.4) 2 Why put the image into a computer? A digital image of a rat. A magnification of the rat s nose.
Centre for Image Analysis Computer Assisted Image Analysis TF p and MN 5p Lecture, 422 (GW, 2.-2.4) 2.4) 2 Why put the image into a computer? A digital image of a rat. A magnification of the rat s nose.
Color and Shading. Color. Shapiro and Stockman, Chapter 6. Color and Machine Vision. Color and Perception
 Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Digital Image Fundamentals. Prof. George Wolberg Dept. of Computer Science City College of New York
 Digital Image Fundamentals Prof. George Wolberg Dept. of Computer Science City College of New York Objectives In this lecture we discuss: - Image acquisition - Sampling and quantization - Spatial and graylevel
Digital Image Fundamentals Prof. George Wolberg Dept. of Computer Science City College of New York Objectives In this lecture we discuss: - Image acquisition - Sampling and quantization - Spatial and graylevel
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Unit - I Computer vision Fundamentals
 Unit - I Computer vision Fundamentals It is an area which concentrates on mimicking human vision systems. As a scientific discipline, computer vision is concerned with the theory behind artificial systems
Unit - I Computer vision Fundamentals It is an area which concentrates on mimicking human vision systems. As a scientific discipline, computer vision is concerned with the theory behind artificial systems
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections.
 Image Interpolation 48 Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections. Fundamentally, interpolation is the process of using known
Image Interpolation 48 Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections. Fundamentally, interpolation is the process of using known
Digital Image Processing. Introduction
 Digital Image Processing Introduction Digital Image Definition An image can be defined as a twodimensional function f(x,y) x,y: Spatial coordinate F: the amplitude of any pair of coordinate x,y, which
Digital Image Processing Introduction Digital Image Definition An image can be defined as a twodimensional function f(x,y) x,y: Spatial coordinate F: the amplitude of any pair of coordinate x,y, which
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
CSE 167: Lecture #6: Color. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012
 CSE 167: Introduction to Computer Graphics Lecture #6: Color Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012 Announcements Homework project #3 due this Friday, October 19
CSE 167: Introduction to Computer Graphics Lecture #6: Color Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012 Announcements Homework project #3 due this Friday, October 19
Image Analysis. 1. A First Look at Image Classification
 Image Analysis Image Analysis 1. A First Look at Image Classification Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems &
Image Analysis Image Analysis 1. A First Look at Image Classification Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems &
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
VC 16/17 TP5 Single Pixel Manipulation
 VC 16/17 TP5 Single Pixel Manipulation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Dynamic Range Manipulation
VC 16/17 TP5 Single Pixel Manipulation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Dynamic Range Manipulation
Image Acquisition Image Digitization Spatial domain Intensity domain Image Characteristics
 Image Acquisition Image Digitization Spatial domain Intensity domain Image Characteristics 1 What is an Image? An image is a projection of a 3D scene into a 2D projection plane. An image can be defined
Image Acquisition Image Digitization Spatial domain Intensity domain Image Characteristics 1 What is an Image? An image is a projection of a 3D scene into a 2D projection plane. An image can be defined
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Review for Exam I, EE552 2/2009
 Gonale & Woods Review or Eam I, EE55 /009 Elements o Visual Perception Image Formation in the Ee and relation to a photographic camera). Brightness Adaption and Discrimination. Light and the Electromagnetic
Gonale & Woods Review or Eam I, EE55 /009 Elements o Visual Perception Image Formation in the Ee and relation to a photographic camera). Brightness Adaption and Discrimination. Light and the Electromagnetic
Final Review. Image Processing CSE 166 Lecture 18
 Final Review Image Processing CSE 166 Lecture 18 Topics covered Basis vectors Matrix based transforms Wavelet transform Image compression Image watermarking Morphological image processing Segmentation
Final Review Image Processing CSE 166 Lecture 18 Topics covered Basis vectors Matrix based transforms Wavelet transform Image compression Image watermarking Morphological image processing Segmentation
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Reading. 2. Fourier analysis and sampling theory. Required: Watt, Section 14.1 Recommended:
 Reading Required: Watt, Section 14.1 Recommended: 2. Fourier analysis and sampling theory Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Don P. Mitchell and Arun N. Netravali,
Reading Required: Watt, Section 14.1 Recommended: 2. Fourier analysis and sampling theory Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Don P. Mitchell and Arun N. Netravali,
CPSC 425: Computer Vision
 CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
CSE 167: Lecture #6: Color. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011
 CSE 167: Introduction to Computer Graphics Lecture #6: Color Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday, October 14
CSE 167: Introduction to Computer Graphics Lecture #6: Color Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday, October 14
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami
 Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Image Acquisition + Histograms
 Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
(0, 1, 1) (0, 1, 1) (0, 1, 0) What is light? What is color? Terminology
 (0, 1, 1) (0, 1, 0) What is light? What is color? Terminology") lecture 23 (0, 1, 1) (0, 0, 0) (0, 0, 1) (0, 1, 1) (1, 1, 1) (1, 1, 0) (0, 1, 0) hue - which ''? saturation - how pure? luminance (value) - intensity What is light? What is? Light consists of electromagnetic
lecture 23 (0, 1, 1) (0, 0, 0) (0, 0, 1) (0, 1, 1) (1, 1, 1) (1, 1, 0) (0, 1, 0) hue - which ''? saturation - how pure? luminance (value) - intensity What is light? What is? Light consists of electromagnetic
What is an Image? Image Acquisition. Image Processing - Lesson 2. An image is a projection of a 3D scene into a 2D projection plane.
 mage Processing - Lesson 2 mage Acquisition mage Characteristics mage Acquisition mage Digitization Sampling Quantization mage Histogram What is an mage? An image is a projection of a 3D scene into a 2D
mage Processing - Lesson 2 mage Acquisition mage Characteristics mage Acquisition mage Digitization Sampling Quantization mage Histogram What is an mage? An image is a projection of a 3D scene into a 2D
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010
 An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
NAME :... Signature :... Desk no. :... Question Answer
 Written test Tuesday 19th of December 2000. Aids allowed : All usual aids Weighting : All questions are equally weighted. NAME :................................................... Signature :...................................................
Written test Tuesday 19th of December 2000. Aids allowed : All usual aids Weighting : All questions are equally weighted. NAME :................................................... Signature :...................................................
Introduction to Digital Image Processing
 Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
EC-433 Digital Image Processing
 EC-433 Digital Image Processing Lecture 4 Digital Image Fundamentals Dr. Arslan Shaukat Acknowledgement: Lecture slides material from Dr. Rehan Hafiz, Gonzalez and Woods Interpolation Required in image
EC-433 Digital Image Processing Lecture 4 Digital Image Fundamentals Dr. Arslan Shaukat Acknowledgement: Lecture slides material from Dr. Rehan Hafiz, Gonzalez and Woods Interpolation Required in image
Detector systems for light microscopy
 Detector systems for light microscopy The human eye the perfect detector? Resolution: 0.1-0.3mm @25cm object distance Spectral sensitivity ~400-700nm Has a dynamic range of 10 decades Two detectors: rods
Detector systems for light microscopy The human eye the perfect detector? Resolution: 0.1-0.3mm @25cm object distance Spectral sensitivity ~400-700nm Has a dynamic range of 10 decades Two detectors: rods
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
CoE4TN3 Medical Image Processing
 CoE4TN3 Medical Image Processing Image Restoration Noise Image sensor might produce noise because of environmental conditions or quality of sensing elements. Interference in the image transmission channel.
CoE4TN3 Medical Image Processing Image Restoration Noise Image sensor might produce noise because of environmental conditions or quality of sensing elements. Interference in the image transmission channel.
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Lecture 2 Image Processing and Filtering
 Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Chapter 2 - Fundamentals. Comunicação Visual Interactiva
 Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Sampling and Reconstruction
 Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Sampling, Aliasing, & Mipmaps
 Sampling, Aliasing, & Mipmaps Last Time? Monte-Carlo Integration Importance Sampling Ray Tracing vs. Path Tracing source hemisphere Sampling sensitive to choice of samples less sensitive to choice of samples
Sampling, Aliasing, & Mipmaps Last Time? Monte-Carlo Integration Importance Sampling Ray Tracing vs. Path Tracing source hemisphere Sampling sensitive to choice of samples less sensitive to choice of samples
Rendering. Converting a 3D scene to a 2D image. Camera. Light. Rendering. View Plane
 Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
INTRODUCTION TO IMAGE PROCESSING (COMPUTER VISION)
") INTRODUCTION TO IMAGE PROCESSING (COMPUTER VISION) Revision: 1.4, dated: November 10, 2005 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center for Machine Perception, Prague,
INTRODUCTION TO IMAGE PROCESSING (COMPUTER VISION) Revision: 1.4, dated: November 10, 2005 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center for Machine Perception, Prague,
EEM 463 Introduction to Image Processing. Week 3: Intensity Transformations
 EEM 463 Introduction to Image Processing Week 3: Intensity Transformations Fall 2013 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Enhancement Domains Spatial
EEM 463 Introduction to Image Processing Week 3: Intensity Transformations Fall 2013 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Enhancement Domains Spatial
Digital Image Fundamentals
 Digital Image Fundamentals Image Quality Objective/ subjective Machine/human beings Mathematical and Probabilistic/ human intuition and perception 6 Structure of the Human Eye photoreceptor cells 75~50
Digital Image Fundamentals Image Quality Objective/ subjective Machine/human beings Mathematical and Probabilistic/ human intuition and perception 6 Structure of the Human Eye photoreceptor cells 75~50
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 30: Light, color, and reflectance Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties of light
CS4670: Computer Vision Noah Snavely Lecture 30: Light, color, and reflectance Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties of light
Lecture 4 Image Enhancement in Spatial Domain
 Digital Image Processing Lecture 4 Image Enhancement in Spatial Domain Fall 2010 2 domains Spatial Domain : (image plane) Techniques are based on direct manipulation of pixels in an image Frequency Domain
Digital Image Processing Lecture 4 Image Enhancement in Spatial Domain Fall 2010 2 domains Spatial Domain : (image plane) Techniques are based on direct manipulation of pixels in an image Frequency Domain
Image Processing. CSCI 420 Computer Graphics Lecture 22
 CSCI 42 Computer Graphics Lecture 22 Image Processing Blending Display Color Models Filters Dithering [Ch 7.13, 8.11-8.12] Jernej Barbic University of Southern California 1 Alpha Channel Frame buffer Simple
CSCI 42 Computer Graphics Lecture 22 Image Processing Blending Display Color Models Filters Dithering [Ch 7.13, 8.11-8.12] Jernej Barbic University of Southern California 1 Alpha Channel Frame buffer Simple
Image Processing. Alpha Channel. Blending. Image Compositing. Blending Errors. Blending in OpenGL
 CSCI 42 Computer Graphics Lecture 22 Image Processing Blending Display Color Models Filters Dithering [Ch 6, 7] Jernej Barbic University of Southern California Alpha Channel Frame buffer Simple color model:
CSCI 42 Computer Graphics Lecture 22 Image Processing Blending Display Color Models Filters Dithering [Ch 6, 7] Jernej Barbic University of Southern California Alpha Channel Frame buffer Simple color model:
Digital Image Processing Lectures 1 & 2
 Lectures 1 & 2, Professor Department of Electrical and Computer Engineering Colorado State University Spring 2013 Introduction to DIP The primary interest in transmitting and handling images in digital
Lectures 1 & 2, Professor Department of Electrical and Computer Engineering Colorado State University Spring 2013 Introduction to DIP The primary interest in transmitting and handling images in digital
International ejournals
 ISSN 2249 5460 Available online at www.internationalejournals.com International ejournals International Journal of Mathematical Sciences, Technology and Humanities 96 (2013) 1063 1069 Image Interpolation
ISSN 2249 5460 Available online at www.internationalejournals.com International ejournals International Journal of Mathematical Sciences, Technology and Humanities 96 (2013) 1063 1069 Image Interpolation
Sampling, Aliasing, & Mipmaps
 Sampling, Aliasing, & Mipmaps Last Time? Monte-Carlo Integration Importance Sampling Ray Tracing vs. Path Tracing source hemisphere What is a Pixel? Sampling & Reconstruction Filters in Computer Graphics
Sampling, Aliasing, & Mipmaps Last Time? Monte-Carlo Integration Importance Sampling Ray Tracing vs. Path Tracing source hemisphere What is a Pixel? Sampling & Reconstruction Filters in Computer Graphics
x' = c 1 x + c 2 y + c 3 xy + c 4 y' = c 5 x + c 6 y + c 7 xy + c 8
 1. Explain about gray level interpolation. The distortion correction equations yield non integer values for x' and y'. Because the distorted image g is digital, its pixel values are defined only at integer
1. Explain about gray level interpolation. The distortion correction equations yield non integer values for x' and y'. Because the distorted image g is digital, its pixel values are defined only at integer
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
11. Image Data Analytics. Jacobs University Visualization and Computer Graphics Lab
 11. Image Data Analytics Motivation Images (and even videos) have become a popular data format for storing information digitally. Data Analytics 377 Motivation Traditionally, scientific and medical imaging
11. Image Data Analytics Motivation Images (and even videos) have become a popular data format for storing information digitally. Data Analytics 377 Motivation Traditionally, scientific and medical imaging
Basic relations between pixels (Chapter 2)
") Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
Image Processing. Ch1: Introduction. Prepared by: Hanan Hardan. Hanan Hardan 1
 Processing Ch1: Introduction Prepared by: Hanan Hardan Hanan Hardan 1 Introduction One picture is worth more than ten thousand words Hanan Hardan 2 References Digital Processing, Rafael C. Gonzalez & Richard
Processing Ch1: Introduction Prepared by: Hanan Hardan Hanan Hardan 1 Introduction One picture is worth more than ten thousand words Hanan Hardan 2 References Digital Processing, Rafael C. Gonzalez & Richard
Image Filtering, Warping and Sampling
 Image Filtering, Warping and Sampling Connelly Barnes CS 4810 University of Virginia Acknowledgement: slides by Jason Lawrence, Misha Kazhdan, Allison Klein, Tom Funkhouser, Adam Finkelstein and David
Image Filtering, Warping and Sampling Connelly Barnes CS 4810 University of Virginia Acknowledgement: slides by Jason Lawrence, Misha Kazhdan, Allison Klein, Tom Funkhouser, Adam Finkelstein and David
Main topics in the Chapter 2. Chapter 2. Digital Image Representation. Bitmaps digitization. Three Types of Digital Image Creation CS 3570
 Main topics in the Chapter Chapter. Digital Image Representation CS 3570 Three main types of creating digital images Bitmapping, Vector graphics, Procedural modeling Frequency in digital image Discrete
Main topics in the Chapter Chapter. Digital Image Representation CS 3570 Three main types of creating digital images Bitmapping, Vector graphics, Procedural modeling Frequency in digital image Discrete
EECS 556 Image Processing W 09. Image enhancement. Smoothing and noise removal Sharpening filters
 EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
Sampling: Application to 2D Transformations
 Sampling: Application to 2D Transformations University of the Philippines - Diliman August Diane Lingrand lingrand@polytech.unice.fr http://www.essi.fr/~lingrand Sampling Computer images are manipulated
Sampling: Application to 2D Transformations University of the Philippines - Diliman August Diane Lingrand lingrand@polytech.unice.fr http://www.essi.fr/~lingrand Sampling Computer images are manipulated
Fourier transform. Filtering. Examples of FT pairs. Examples of FT pairs. Comb function. Examples of FT pairs FRPE. Decomposes into freq.
 Fourier transform Filtering Decomposes into freq. components = )>[@ ƒ [WH ƒläw GW Inverse transform reconstructs the function ) ƒ >;@ = ;ÄH LÄW GÄ ž ƒ Examples of FT pairs Examples of FT pairs FT(delta
Fourier transform Filtering Decomposes into freq. components = )>[@ ƒ [WH ƒläw GW Inverse transform reconstructs the function ) ƒ >;@ = ;ÄH LÄW GÄ ž ƒ Examples of FT pairs Examples of FT pairs FT(delta
Image Analysis - Lecture 1
 General Research Image models Repetition Image Analysis - Lecture 1 Magnus Oskarsson General Research Image models Repetition Lecture 1 Administrative things What is image analysis? Examples of image analysis
General Research Image models Repetition Image Analysis - Lecture 1 Magnus Oskarsson General Research Image models Repetition Lecture 1 Administrative things What is image analysis? Examples of image analysis
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN
 CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image
Ulrik Söderström 16 Feb Image Processing. Segmentation
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Image Processing, Warping, and Sampling
 Image Processing, Warping, and Sampling Michael Kazhdan (601.457/657) HB Ch. 4.8 FvDFH Ch. 14.10 Outline Image Processing Image Warping Image Sampling Image Processing What about the case when the modification
Image Processing, Warping, and Sampling Michael Kazhdan (601.457/657) HB Ch. 4.8 FvDFH Ch. 14.10 Outline Image Processing Image Warping Image Sampling Image Processing What about the case when the modification
Ch 22 Inspection Technologies
 Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Brightness and geometric transformations
 Brightness and geometric transformations Václav Hlaváč Czech Technical University in Prague Czech Institute of Informatics, Robotics and Cybernetics 166 36 Prague 6, Jugoslávských partyzánů 1580/3, Czech
Brightness and geometric transformations Václav Hlaváč Czech Technical University in Prague Czech Institute of Informatics, Robotics and Cybernetics 166 36 Prague 6, Jugoslávských partyzánů 1580/3, Czech
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Sampling, Aliasing, & Mipmaps
 Last Time? Sampling, Aliasing, & Mipmaps 2D Texture Mapping Perspective Correct Interpolation Common Texture Coordinate Projections Bump Mapping Displacement Mapping Environment Mapping Texture Maps for
Last Time? Sampling, Aliasing, & Mipmaps 2D Texture Mapping Perspective Correct Interpolation Common Texture Coordinate Projections Bump Mapping Displacement Mapping Environment Mapping Texture Maps for
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Binary representation and data
 Binary representation and data Loriano Storchi loriano@storchi.org http:://www.storchi.org/ Binary representation of numbers In a positional numbering system given the base this directly defines the number
Binary representation and data Loriano Storchi loriano@storchi.org http:://www.storchi.org/ Binary representation of numbers In a positional numbering system given the base this directly defines the number
Computer Graphics. Sampling Theory & Anti-Aliasing. Philipp Slusallek
 Computer Graphics Sampling Theory & Anti-Aliasing Philipp Slusallek Dirac Comb (1) Constant & δ-function flash Comb/Shah function 2 Dirac Comb (2) Constant & δ-function Duality f(x) = K F(ω) = K (ω) And
Computer Graphics Sampling Theory & Anti-Aliasing Philipp Slusallek Dirac Comb (1) Constant & δ-function flash Comb/Shah function 2 Dirac Comb (2) Constant & δ-function Duality f(x) = K F(ω) = K (ω) And
Image Registration Lecture 4: First Examples
 Image Registration Lecture 4: First Examples Prof. Charlene Tsai Outline Example Intensity-based registration SSD error function Image mapping Function minimization: Gradient descent Derivative calculation
Image Registration Lecture 4: First Examples Prof. Charlene Tsai Outline Example Intensity-based registration SSD error function Image mapping Function minimization: Gradient descent Derivative calculation
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Volume Illumination, Contouring
 Volume Illumination, Contouring Computer Animation and Visualisation Lecture 0 tkomura@inf.ed.ac.uk Institute for Perception, Action & Behaviour School of Informatics Contouring Scaler Data Overview -
Volume Illumination, Contouring Computer Animation and Visualisation Lecture 0 tkomura@inf.ed.ac.uk Institute for Perception, Action & Behaviour School of Informatics Contouring Scaler Data Overview -
Lecture 10: Image Descriptors and Representation
 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
Wireless Communication
 Wireless Communication Systems @CS.NCTU Lecture 6: Image Instructor: Kate Ching-Ju Lin ( 林靖茹 ) Chap. 9 of Fundamentals of Multimedia Some reference from http://media.ee.ntu.edu.tw/courses/dvt/15f/ 1 Outline
Wireless Communication Systems @CS.NCTU Lecture 6: Image Instructor: Kate Ching-Ju Lin ( 林靖茹 ) Chap. 9 of Fundamentals of Multimedia Some reference from http://media.ee.ntu.edu.tw/courses/dvt/15f/ 1 Outline
ELEC Dr Reji Mathew Electrical Engineering UNSW
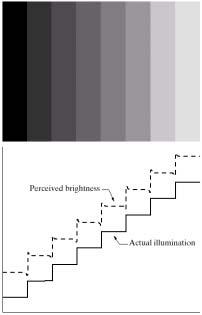
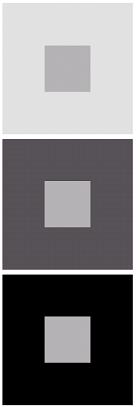
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Dynamic Range and Weber s Law HVS is capable of operating over an enormous dynamic range, However, sensitivity is far from uniform over this range Example:
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Dynamic Range and Weber s Law HVS is capable of operating over an enormous dynamic range, However, sensitivity is far from uniform over this range Example: