Feature Matching + Indexing and Retrieval
|
|
|
- Imogene Fitzgerald
- 5 years ago
- Views:
Transcription

1 CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015
2 Today Review (fitting) Hough transform RANSAC Matching points Retrieving object instances Indexing by visual words Spatial verification
3 Fitting vs Matching/Alignment Fitting models (lines) to points, i.e. find the parameters of a model that best fits the data Least squares Hough transform RANSAC Matching = finding correspondences between points, i.e. find the parameters of the transformation that best aligns points
4 Least squares line fitting Data: (x 1, y 1 ),, (x n, y n ) Line equation: y i = m x i + b Find (m, b) to minimize y Ap n n n i i i y y b m x x y b m x E n i i i y b mx E 1 2 ) ( (x i, y i ) y=mx+b Matlab: p = A \ y; Modified from Svetlana Lazebnik
5 Finding lines in an image: Hough space y y 0 (x 0, y 0 ) (x 1, y 1 ) b b = x 1 m + y 1 x 0 image space x m Hough (parameter) space What are the line parameters for the line that contains both (x 0, y 0 ) and (x 1, y 1 )? It is the intersection of the lines b = x 0 m + y 0 and b = x 1 m + y 1 Steve Seitz
6 Finding lines in an image: Hough algorithm y b image space x m Hough (parameter) space How can we use this to find the most likely parameters (m,b) for the most prominent line in the image space? Let each edge point in image space vote for a set of possible parameters in Hough space Accumulate votes in discrete set of bins; parameters with the most votes indicate line in image space. Steve Seitz
7 Parameter space representation Problems with the (m,b) space: Unbounded parameter domains Vertical lines require infinite m Alternative: polar representation xcos y sin Each point (x,y) will add a sinusoid in the (,) parameter space Svetlana Lazebnik
8 Hough transform P.V.C. Hough, Machine Analysis of Bubble Chamber Pictures, Proc. Int. Conf. High Energy Accelerators and Instrumentation, 1959 Use a polar representation for the parameter space y x Hough space x cos ysin Silvio Savarese
9 Algorithm outline Initialize accumulator H to all zeros For each feature point (x,y) ρ in the image For θ = 0 to 180 ρ = x cos θ + y sin θ H(θ, ρ) = H(θ, ρ) + 1 θ end end Find the value(s) of (θ*, ρ*) where H(θ, ρ) is a local maximum The detected line in the image is given by ρ* = x cos θ* + y sin θ* Svetlana Lazebnik
10 Incorporating image gradients Recall: when we detect an edge point, we also know its gradient direction But this means that the line is uniquely determined! Modified Hough transform: For each edge point (x,y) θ = gradient orientation at (x,y) ρ = x cos θ + y sin θ H(θ, ρ) = H(θ, ρ) + 1 end Svetlana Lazebnik
11 Hough transform for circles Circle: center (a,b) and radius r ( xi a) ( yi b) r For a fixed radius r, unknown gradient direction b Image space Hough space a Kristen Grauman
 ( yi b) r For a fixed radius r,")

12 Hough transform for circles Circle: center (a,b) and radius r ( xi a) ( yi b) r For a fixed radius r, unknown gradient direction Intersection: most votes for center occur here. Image space Hough space Kristen Grauman
13 Hough transform for circles For every edge pixel (x,y) : For each possible radius value r: end For each possible gradient direction θ: // or use estimated gradient at (x,y) end end Modified from Kristen Grauman a = x r cos(θ) // column b = y r sin(θ) // row H[a,b,r] += 1 θ x
14 Generalized Hough transform Define a model shape by its boundary points and a reference point. Offline procedure: p 1 θ x a θ p 2 At each boundary point, compute displacement vector: r = a p i. Model shape θ θ Store these vectors in a table indexed by gradient orientation θ. Kristen Grauman [Dana H. Ballard, Generalizing the Hough Transform to Detect Arbitrary Shapes, 1980]
15 Pros Hough transform: pros and cons All points are processed independently, so can cope with occlusion, gaps Some robustness to noise: noise points unlikely to contribute consistently to any single bin Can detect multiple instances of a model in a single pass Cons Complexity of search time increases exponentially with the number of model parameters If 3 parameters and 10 choices for each, search is O(10 3 ) Non-target shapes can produce spurious peaks in parameter space Quantization: can be tricky to pick a good grid size Modified from Kristen Grauman
16 RANSAC (RANdom SAmple Consensus) : Fischler & Bolles in 81. Algorithm: 1. Sample (randomly) the number of points required to fit the model 2. Solve for model parameters using samples 3. Score by the fraction of inliers within a preset threshold of the model Repeat 1-3 until the best model is found with high confidence Silvio Savarese
17 RANSAC Line fitting example Algorithm: 1. Sample (randomly) the number of points required to fit the model (#=2) 2. Solve for model parameters using samples 3. Score by the fraction of inliers within a preset threshold of the model Repeat 1-3 until the best model is found with high confidence Silvio Savarese
18 RANSAC Line fitting example Algorithm: 1. Sample (randomly) the number of points required to fit the model (#=2) 2. Solve for model parameters using samples 3. Score by the fraction of inliers within a preset threshold of the model Repeat 1-3 until the best model is found with high confidence Silvio Savarese
19 RANSAC Line fitting example N I 6 Algorithm: 1. Sample (randomly) the number of points required to fit the model (#=2) 2. Solve for model parameters using samples 3. Score by the fraction of inliers within a preset threshold of the model Repeat 1-3 until the best model is found with high confidence Silvio Savarese
20 RANSAC Algorithm: N I Sample (randomly) the number of points required to fit the model (#=2) 2. Solve for model parameters using samples 3. Score by the fraction of inliers within a preset threshold of the model Repeat 1-3 until the best model is found with high confidence Silvio Savarese
21 Pros RANSAC pros and cons Simple and general Applicable to many different problems Often works well in practice Cons Lots of parameters to tune Doesn t work well for low inlier ratios (too many iterations, or can fail completely) Can t always get a good initialization of the model based on the minimum number of samples Common applications Image stitching Relating two views Svetlana Lazebnik
22 Today Review (fitting) Hough transform RANSAC Matching points Retrieving object instances Indexing by visual words Spatial verification
23 Alignment problem We have previously considered how to fit a model to image evidence e.g., a line to edge points In alignment, we will fit the parameters of some transformation according to a set of matching feature pairs ( correspondences ). Difficulties Noise Outliers x i T x i ' Kristen Grauman and Derek Hoiem
")



24 Parametric (global) warping Examples of parametric warps: translation rotation aspect affine perspective Alyosha Efros
25 Parametric (global) warping T p = (x,y) p = (x,y ) Transformation T is a coordinate-changing machine: p = T(p) What does it mean that T is global? Is the same for any point p Can be described by just a few numbers (parameters) Let s represent T as a matrix: p = Mp Alyosha Efros x y ' ' M x y
26 Scaling Scaling a coordinate means multiplying each of its components by a scalar Uniform scaling means this scalar is the same for all components: 2 Alyosha Efros
27 Scaling Non-uniform scaling: different scalars per component: X 2, Y 0.5 Alyosha Efros
28 Scaling Scaling operation: Or, in matrix form: by y ax x ' ' y x y x ' ' scaling matrix S Alyosha Efros y x b a y x 0 0 ' '
29 2D Linear Transformations x' y' a c bx d y Only linear 2D transformations can be represented with a 2x2 matrix. Linear transformations are combinations of Scale, Rotation, Shear, and Mirror Alyosha Efros
30 Affine Transformations Affine transformations are combinations of Linear transformations, and Translations Properties of affine transformations: Lines map to lines Parallel lines remain parallel Ratios are preserved Closed under composition 1 y x f e d c b a y x ' ' y x f e d c b a y x or Derek Hoiem
31 Fitting an affine transformation Assuming we know the correspondences, how do we get the transformation? ), ( i i y x ), ( i x i y t t y x m m m m y x i i i i i i i i i i y x t t m m m m y x y x Alyosha Efros
32 What are the correspondences?? Compare content in local patches, find best matches. e.g., simplest approach: scan with template, and compute SSD or correlation between list of pixel intensities in the patch Kristen Grauman


33 N pixels Feature-based Keypoint Matching 1. Find a set of distinctive keypoints A 1 A 2 A 3 2. Define a region around each keypoint N pixels f A e.g. color d( f A, f B ) T f B e.g. color K. Grauman, B. Leibe 3. Extract and normalize the region content 4. Compute a local descriptor from the normalized region 5. Match local descriptors
34 Example: solving for translation A 1 A 2 A 3 B 1 B 2 B 3 Given matched points in {A} and {B}, estimate the translation of the object y x A i A i B i B i t t y x y x Derek Hoiem
35 Example: solving for translation A 1 A 2 A 3 B 1 B 2 B 3 Least squares solution y x A i A i B i B i t t y x y x (t x, t y ) 1. Write down objective function in form Ax=b 2. Solve using pseudo-inverse or eigenvalue decomposition A n B n A n B n A B A B y x y y x x y y x x t t Derek Hoiem
36 Example: solving for translation A 1 A 5 B 4 A 2 A B 1 3 (t x, t y ) A 4 B 2 B 3 B 5 Problem: outliers RANSAC solution 1. Sample a set of matching points (1 pair) 2. Solve for transformation parameters 3. Score parameters with number of inliers 4. Repeat steps 1-3 N times 5. Solve using least squares with inliers x y B i B i x y A i A i t t x y Derek Hoiem
37 Example: solving for translation B 4 A 1 B 5 B 6 A 2 A B 1 3 (t x, t y ) A 4 B 2 B 3 A 5 A 6 Problem: outliers, multiple objects, and/or many-to-one matches Derek Hoiem Hough transform solution 1. Initialize a grid of parameter values 2. Each matched pair casts a vote for consistent values 3. Find the parameters with the most votes 4. Solve using least squares with inliers x y B i B i BOARD x y A i A i t t x y
38 Finding objects using SIFT features Each feature match gives an alignment hypothesis (for scale, translation, and orientation of model in image) Assuming we use scale, rotation, and translation invariant local features Model Novel image Adapted from Svetlana Lazebnik


39 Finding objects using SIFT features A hypothesis generated by a single match may be unreliable So let each match vote for a hypothesis in Hough space Model Novel image Kristen Grauman
40 Gen Hough Transform details (Lowe s system) Training phase: For each model feature, record 2D location, scale, and orientation of model (relative to normalized feature frame) Test phase: Let each match between a test SIFT feature and a model feature vote in a 4D Hough space (x, y) location orientation scale Find all bins with at least three votes and perform geometric verification Estimate least squares affine transformation Search for additional features that agree with the alignment Object found if at least T matched points found David G. Lowe. "Distinctive image features from scale-invariant keypoints. IJCV 60 (2), pp , Adapted from Svetlana Lazebnik




41 Example result Background subtract for model boundaries Objects recognized Recognition in spite of occlusion [Lowe]
42 Fitting and Matching: Summary Fitting problems require finding any supporting evidence for a model, even within clutter and missing features. Voting and inlier approaches, such as the Hough transform and RANSAC, make it possible to find likely model parameters without searching all combinations of features. Can use these approaches to compute robust feature alignment/matching, and to match object templates. Adapted from Kristen Grauman and Derek Hoiem


43 Seam Carving Results David Fioravanti


44 Seam Carving Results Edwin Mellett

45 Seam Carving Results Sarah Dubnik


46 Seam Carving Results Joel Roggeman



47 Seam Carving Results John Phillips
48 Today Review (fitting) Hough transform RANSAC Matching points Retrieving object instances Indexing by visual words Spatial verification
49 Indexing local features Each patch / region has a descriptor, which is a point in some high-dimensional feature space (e.g., SIFT) Descriptor s feature space Kristen Grauman
50 Indexing local features When we see close points in feature space, we have similar descriptors, which indicates similar local content. Descriptor s feature space Query image Kristen Grauman Database images
51 Indexing local features With potentially thousands of features per image, and hundreds to millions of images to search, how to efficiently find those that are relevant to a new image? Kristen Grauman

52 Indexing local features: inverted file index For text documents, an efficient way to find all pages on which a word occurs is to use an index We want to find all images in which a feature occurs. To use this idea, we ll need to map our features to visual words. Kristen Grauman

53 Visual words: main idea Extract some local features from a number of images e.g., SIFT descriptor space: each point is 128-dimensional D. Nister, CVPR 2006

54 D. Nister, CVPR 2006 Visual words: main idea

55 D. Nister, CVPR 2006 Visual words: main idea

56 D. Nister, CVPR 2006 Visual words: main idea
57 Each point is a local descriptor, e.g. SIFT vector. D. Nister, CVPR 2006
58 D. Nister, CVPR 2006


59 Visual words Example: each group of patches belongs to the same visual word Figure from Sivic & Zisserman, ICCV 2003 Adapted from Kristen Grauman

60 Last class Index displacements by visual codeword test image B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004 Svetlana Lazebnik

61 Last class 1. Build codebook of patches around extracted interest points using clustering (more on this later in the course) Svetlana Lazebnik
62 Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space Kristen Grauman Word #3 Query Descriptor s feature space Quantize via clustering, let cluster centers be the prototype words Determine which word to assign to each new image region by finding the closest cluster center.

63 Inverted file index Database images are loaded into the index mapping words to image numbers Kristen Grauman
64 Inverted file index When will this give us a significant gain in efficiency? New query image is mapped to indices of database images that share a word. We can call this retrieval process instance recognition. Adapted from Kristen Grauman
65 Instance recognition: remaining issues How to summarize the content of an entire image? And gauge overall similarity? How large should the vocabulary be? How to perform quantization efficiently? Is having the same set of visual words enough to identify the object/scene? How to verify spatial agreement? Kristen Grauman
66 Analogy to documents Of all the sensory impressions proceeding to the brain, the visual experiences are the dominant ones. Our perception of the world around us is based essentially on the messages that reach the brain from our eyes. For a long time it was thought that the retinal image was transmitted sensory, point brain, by point to visual centers in the brain; the cerebral cortex was a visual, perception, movie screen, so to speak, upon which the image in retinal, the eye was cerebral projected. Through cortex, the discoveries of eye, Hubel cell, and Wiesel optical we now know that behind the origin of the visual perception in the nerve, brain there image is a considerably more complicated Hubel, course of Wiesel events. By following the visual impulses along their path to the various cell layers of the optical cortex, Hubel and Wiesel have been able to demonstrate that the message about the image falling on the retina undergoes a stepwise analysis in a system of nerve cells stored in columns. In this system each cell has its specific function and is responsible for a specific detail in the pattern of the retinal image. China is forecasting a trade surplus of $90bn ( 51bn) to $100bn this year, a threefold increase on 2004's $32bn. The Commerce Ministry said the surplus would be created by a predicted 30% jump in exports to $750bn, compared with a 18% rise in imports to $660bn. The figures China, are likely trade, to further annoy the US, which has long argued that surplus, commerce, China's exports are unfairly helped by a deliberately exports, undervalued imports, yuan. Beijing US, agrees the yuan, surplus bank, is too high, domestic, but says the yuan is only one factor. Bank of China governor Zhou foreign, Xiaochuan increase, said the country also needed to do trade, more to value boost domestic demand so more goods stayed within the country. China increased the value of the yuan against the dollar by 2.1% in July and permitted it to trade within a narrow band, but the US wants the yuan to be allowed to trade freely. However, Beijing has made it clear that it will take its time and tread carefully before allowing the yuan to rise further in value. ICCV 2005 short course, L. Fei-Fei







67
68 Bags of visual words Summarize entire image based on its distribution (histogram) of word occurrences. Analogous to bag of words representation commonly used for documents.

69 Comparing bags of words Rank frames by normalized scalar product between their (possibly weighted) occurrence counts---nearest neighbor search for similar images. [ ] [ ] sim d j, q = d j, q d j q = i=1 V d j i q(i) i=1 V d j (i) 2 V i=1 q(i) 2 d j q for vocabulary of V words Kristen Grauman
70 Bags of words: pros and cons + flexible to geometry / deformations / viewpoint + compact summary of image content + very good results in practice - basic model ignores geometry must verify afterwards, or encode via features - background and foreground mixed when bag covers whole image - optimal vocabulary formation remains unclear Adapted from Kristen Grauman


71 Inverted file index and bags of words similarity w Extract words in query 2. Inverted file index to find relevant frames 3. Compare word counts Adapted from Kristen Grauman
72 tf-idf weighting Term frequency inverse document frequency Describe frame by frequency of each word within it, downweight words that appear often in the database (Standard weighting for text retrieval) Number of occurrences of word i in document d Number of words in document d Total number of documents in database Number of documents word i occurs in, in whole database Kristen Grauman

73 Bags of words for content-based image retrieval Slide from Andrew Zisserman Sivic & Zisserman, ICCV 2003

74 Slide from Andrew Zisserman Sivic & Zisserman, ICCV 2003
75 Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Video Google System 1. Collect all words within query region 2. Inverted file index to find relevant frames 3. Compare word counts 4. Spatial verification Sivic & Zisserman, ICCV 2003 Demo online at : esearch/vgoogle/index.html Query region Retrieved frames K. Grauman, B. Leibe 75









76 precision Scoring retrieval quality Query Database size: 10 images Relevant (total): 5 images Results (ordered): precision = #relevant / #returned recall = #relevant / #total relevant Ondrej Chum recall
77 Instance recognition: remaining issues How to summarize the content of an entire image? And gauge overall similarity? How large should the vocabulary be? How to perform quantization efficiently? Is having the same set of visual words enough to identify the object/scene? How to verify spatial agreement? Kristen Grauman

78 Vocabulary size Results for recognition task with 6347 images Branching factors Influence on performance, sparsity Kristen Grauman Nister & Stewenius, CVPR 2006
79 Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Vocabulary Trees: hierarchical clustering for large vocabularies Tree construction: [Nister & Stewenius, CVPR 06] Slide credit: David Nister
80 Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Vocabulary Tree Training: Filling the tree [Nister & Stewenius, CVPR 06] K. Grauman, B. Leibe Slide credit: David Nister
81 Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Vocabulary Tree Training: Filling the tree [Nister & Stewenius, CVPR 06] K. Grauman, B. Leibe Slide credit: David Nister
82 Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Vocabulary Tree Training: Filling the tree [Nister & Stewenius, CVPR 06] K. Grauman, B. Leibe Slide credit: David Nister

83 Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Vocabulary Tree Recognition [Nister & Stewenius, CVPR 06] Slide credit: David Nister
84 Complexity What is the computational advantage of the hierarchical representation bag of words, vs. a flat vocabulary? Complexity depends on branching factor and number of levels Adapted from Kristen Grauman
85 Instance recognition: remaining issues How to summarize the content of an entire image? And gauge overall similarity? How large should the vocabulary be? How to perform quantization efficiently? Is having the same set of visual words enough to identify the object/scene? How to verify spatial agreement? Kristen Grauman
86 Today Review (fitting) Hough transform RANSAC Matching points Retrieving object instances Indexing by visual words Spatial verification
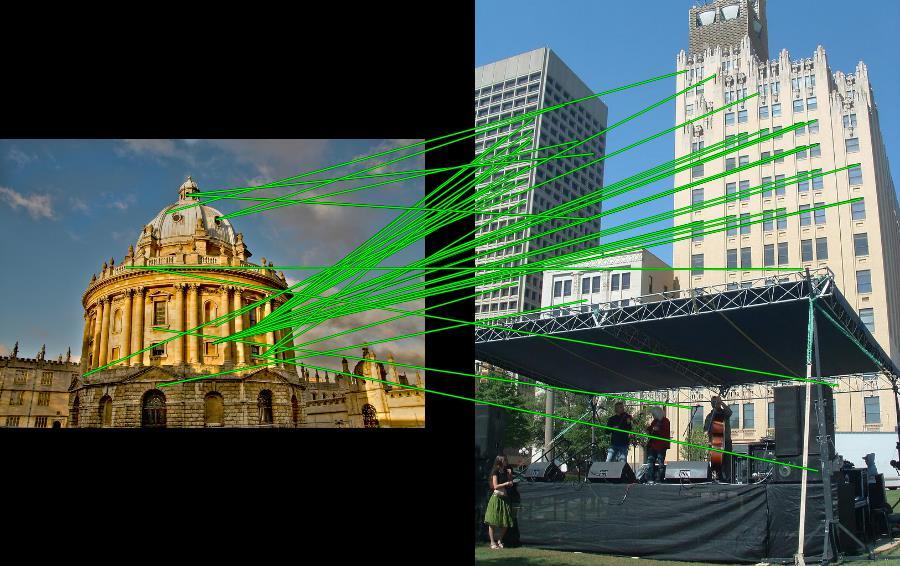
87 Spatial Verification Query Query DB image with high BoW similarity DB image with high BoW similarity Both image pairs have many visual words in common. Ondrej Chum
88 Spatial Verification Query Query DB image with high BoW similarity DB image with high BoW similarity Only some of the matches are mutually consistent Ondrej Chum
89 Spatial Verification: two basic strategies RANSAC Typically sort by BoW similarity as initial filter Verify by checking support (inliers) for possible transformations e.g., success if find a transformation with > N inlier correspondences Generalized Hough Transform Let each matched feature cast a vote on location, scale, orientation of the model object Verify parameters with enough votes Kristen Grauman
90 Kristen Grauman RANSAC verification


91 Kristen Grauman RANSAC verification







92 Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Video Google System 1. Collect all words within query region 2. Inverted file index to find relevant frames 3. Compare word counts 4. Spatial verification Sivic & Zisserman, ICCV 2003 Demo online at : esearch/vgoogle/index.html Query region Retrieved frames Kristen Grauman



93 Visual Perceptual Object and Recognition Sensory Augmented Tutorial Computing Example Applications Mobile tourist guide Self-localization Object/building recognition Photo/video augmentation B. Leibe [Quack, Leibe, Van Gool, CIVR 08]
94 Indexing and Retrieval: Summary Bag of words representation: quantize feature space to make discrete set of visual words Summarize image by distribution of words Index individual words Inverted index: pre-compute index to enable faster search at query time Recognition of instances via alignment: matching local features followed by spatial verification Robust fitting : RANSAC, GHT Adapted from Kristen Grauman
Indexing local features and instance recognition May 16 th, 2017
 Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 14 th, 2015
 Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
Indexing local features and instance recognition May 15 th, 2018
 Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 15 th, 2018 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
CS 4495 Computer Vision Classification 3: Bag of Words. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
CS 4495 Computer Vision Classification 3: Bag of Words Aaron Bobick School of Interactive Computing Administrivia PS 6 is out. Due Tues Nov 25th, 11:55pm. One more assignment after that Mea culpa This
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Recognizing object instances
 Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Recognizing object instances UT-Austin Instance recognition Motivation visual search Visual words quantization, index, bags of words Spatial verification affine; RANSAC, Hough Other text retrieval tools
Recognizing Object Instances. Prof. Xin Yang HUST
 Recognizing Object Instances Prof. Xin Yang HUST Applications Image Search 5 Years Old Techniques Applications For Toys Applications Traffic Sign Recognition Today: instance recognition Visual words quantization,
Recognizing Object Instances Prof. Xin Yang HUST Applications Image Search 5 Years Old Techniques Applications For Toys Applications Traffic Sign Recognition Today: instance recognition Visual words quantization,
Recognizing object instances. Some pset 3 results! 4/5/2011. Monday, April 4 Prof. Kristen Grauman UT-Austin. Christopher Tosh.
 Recognizing object instances Some pset 3 results! Monday, April 4 Prof. UT-Austin Brian Bates Christopher Tosh Brian Nguyen Che-Chun Su 1 Ryu Yu James Edwards Kevin Harkness Lucy Liang Lu Xia Nona Sirakova
Recognizing object instances Some pset 3 results! Monday, April 4 Prof. UT-Austin Brian Bates Christopher Tosh Brian Nguyen Che-Chun Su 1 Ryu Yu James Edwards Kevin Harkness Lucy Liang Lu Xia Nona Sirakova
Pattern recognition (3)
") Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Distances and Kernels. Motivation
 Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping
 Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Motivation: Analogy to Documents O f a l l t h e s e
Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Motivation: Analogy to Documents O f a l l t h e s e
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Instance recognition
 Instance recognition Thurs Oct 29 Last time Depth from stereo: main idea is to triangulate from corresponding image points. Epipolar geometry defined by two cameras We ve assumed known extrinsic parameters
Instance recognition Thurs Oct 29 Last time Depth from stereo: main idea is to triangulate from corresponding image points. Epipolar geometry defined by two cameras We ve assumed known extrinsic parameters
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
Lecture 14: Indexing with local features. Thursday, Nov 1 Prof. Kristen Grauman. Outline
 Lecture 14: Indexing with local features Thursday, Nov 1 Prof. Kristen Grauman Outline Last time: local invariant features, scale invariant detection Applications, including stereo Indexing with invariant
Lecture 14: Indexing with local features Thursday, Nov 1 Prof. Kristen Grauman Outline Last time: local invariant features, scale invariant detection Applications, including stereo Indexing with invariant
Recognition with Bag-ofWords. (Borrowing heavily from Tutorial Slides by Li Fei-fei)
") Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
Today. Main questions 10/30/2008. Bag of words models. Last time: Local invariant features. Harris corner detector: rotation invariant detection
 Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Hough Transform and RANSAC
 CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
Prof. Kristen Grauman
 Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Lecture 9 Fitting and Matching
 Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Lecture 8 Fitting and Matching
 Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Keypoint-based Recognition and Object Search
 03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
Photo by Carl Warner
 Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Fitting: Voting and the Hough Transform April 23 rd, Yong Jae Lee UC Davis
 Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting. Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!
! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!") Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Finding 2D Shapes and the Hough Transform
 CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
Perception IV: Place Recognition, Line Extraction
 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Object Classification for Video Surveillance
 Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Model Fitting: The Hough transform II
 Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Recognition. Topics that we will try to cover:
 Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Object Recognition and Augmented Reality
 11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
Model Fitting: The Hough transform I
 Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
Lecture 8: Fitting. Tuesday, Sept 25
 Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Visual Navigation for Flying Robots. Structure From Motion
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Structure From Motion Dr. Jürgen Sturm VISNAV Oral Team Exam Date and Time Student Name Student Name Student Name Mon, July
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Structure From Motion Dr. Jürgen Sturm VISNAV Oral Team Exam Date and Time Student Name Student Name Student Name Mon, July
Lecture 4: Finding lines: from detection to model fitting
 Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
Announcements, schedule. Lecture 8: Fitting. Weighted graph representation. Outline. Segmentation by Graph Cuts. Images as graphs
 Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Fitting. Lecture 8. Cristian Sminchisescu. Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce
 Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Homography estimation
 RANSAC continued Homography estimation x w? ~x img H~x w Homography estimation? x img ~x w = H 1 ~x img Homography estimation (0,0) (1,0) (6.4,2.8) (8.0,2.9) (5.6, 4.0) (7.8, 4.2) (0,1) (1,1) Ah =0s.tkhk
RANSAC continued Homography estimation x w? ~x img H~x w Homography estimation? x img ~x w = H 1 ~x img Homography estimation (0,0) (1,0) (6.4,2.8) (8.0,2.9) (5.6, 4.0) (7.8, 4.2) (0,1) (1,1) Ah =0s.tkhk
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Fitting a transformation: Feature-based alignment April 30 th, Yong Jae Lee UC Davis
 Fitting a transformation: Feature-based alignment April 3 th, 25 Yong Jae Lee UC Davis Announcements PS2 out toda; due 5/5 Frida at :59 pm Color quantization with k-means Circle detection with the Hough
Fitting a transformation: Feature-based alignment April 3 th, 25 Yong Jae Lee UC Davis Announcements PS2 out toda; due 5/5 Frida at :59 pm Color quantization with k-means Circle detection with the Hough
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Bias-Variance Trade-off (cont d) + Image Representations
 + Image Representations") CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Category Recognition. Jia-Bin Huang Virginia Tech ECE 6554 Advanced Computer Vision
 Category Recognition Jia-Bin Huang Virginia Tech ECE 6554 Advanced Computer Vision Administrative stuffs Presentation and discussion leads assigned https://docs.google.com/spreadsheets/d/1p5pfycio5flq
Category Recognition Jia-Bin Huang Virginia Tech ECE 6554 Advanced Computer Vision Administrative stuffs Presentation and discussion leads assigned https://docs.google.com/spreadsheets/d/1p5pfycio5flq
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Large Scale Image Retrieval
 Large Scale Image Retrieval Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague Features Affine invariant features Efficient descriptors Corresponding regions
Large Scale Image Retrieval Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague Features Affine invariant features Efficient descriptors Corresponding regions
Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Lecture: RANSAC and feature detectors
 Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Bag of Words Models. CS4670 / 5670: Computer Vision Noah Snavely. Bag-of-words models 11/26/2013
 CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
Lecture 12 Visual recognition
 Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
CS 1674: Intro to Computer Vision. Midterm Review. Prof. Adriana Kovashka University of Pittsburgh October 10, 2016
 CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
The bits the whirl-wind left out..
 The bits the whirl-wind left out.. Reading: Szeliski Background: 1 Edge Features Reading: Szeliski - 1.1 + 4.2.1 (Background: Ch 2 + 3.1 3.3) Background: 2 Edges as Gradients Edge detection = differential
The bits the whirl-wind left out.. Reading: Szeliski Background: 1 Edge Features Reading: Szeliski - 1.1 + 4.2.1 (Background: Ch 2 + 3.1 3.3) Background: 2 Edges as Gradients Edge detection = differential
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Wikipedia - Mysid
 Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Supervised learning. f(x) = y. Image feature
 = y. Image feature") Coffer Illusion Coffer Illusion Supervised learning f(x) = y Prediction function Image feature Output (label) Training: Given a training set of labeled examples: {(x 1,y 1 ),, (x N,y N )} Estimate the
Coffer Illusion Coffer Illusion Supervised learning f(x) = y Prediction function Image feature Output (label) Training: Given a training set of labeled examples: {(x 1,y 1 ),, (x N,y N )} Estimate the
Video Google: A Text Retrieval Approach to Object Matching in Videos
 Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
RANSAC and some HOUGH transform
 RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
Large-scale visual recognition The bag-of-words representation
 Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Image Features and Categorization. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Got your proposals! Thanks! Will reply with feedbacks this week. HW 4 Due 11:59pm on Wed,
Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Got your proposals! Thanks! Will reply with feedbacks this week. HW 4 Due 11:59pm on Wed,
Image Features and Categorization. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Proposal due 11:59 PM on Thursday, Oct 27 Submit via CANVAS Send a copy to Jia-Bin and
Image Features and Categorization Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Final project Proposal due 11:59 PM on Thursday, Oct 27 Submit via CANVAS Send a copy to Jia-Bin and
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Elaborazione delle Immagini Informazione Multimediale. Raffaella Lanzarotti
 Elaborazione delle Immagini Informazione Multimediale Raffaella Lanzarotti HOUGH TRANSFORM Paragraph 4.3.2 of the book at link: szeliski.org/book/drafts/szeliskibook_20100903_draft.pdf Thanks to Kristen
Elaborazione delle Immagini Informazione Multimediale Raffaella Lanzarotti HOUGH TRANSFORM Paragraph 4.3.2 of the book at link: szeliski.org/book/drafts/szeliskibook_20100903_draft.pdf Thanks to Kristen
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Computer Vision Lecture 6
 Computer Vision Lecture 6 Segmentation 12.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Image Processing Basics Structure Extraction Segmentation
Computer Vision Lecture 6 Segmentation 12.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Image Processing Basics Structure Extraction Segmentation
Fitting. Fitting. Slides S. Lazebnik Harris Corners Pkwy, Charlotte, NC
 Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical