larly shaped triangles and is preferred over alternative triangulations as the geometric data structure in the split and merge scheme. The incremental
|
|
|
- Arnold Miles
- 6 years ago
- Views:
Transcription
1 Combining Region Splitting and Edge Detection through Guided Delaunay Image Subdivision T. Gevers & A. W. M. Smeulders Faculty of Mathematics & Computer Science, University of Amsterdam Kruislaan 3, 198 SJ Amsterdam, The Netherlands Abstract In this paper, an adaptive split-and-merge segmentation method is proposed. The splitting phase of the algorithm employs the incremental Delaunay triangulation competent of forming grid edges of arbitrary orientation and position. The tessellation grid, dened by the Delaunay triangulation, is adjusted to the semantics of the image data by combining similarity and dierence information among pixels. Experimental results on synthetic images show that the method is robust to dierent object edge orientations, partially weak object edges and very noisy homogeneous regions. Experiments on a real image indicate that the method yields good segmentation results even when there is a quadratic sloping of intensities particularly suited for segmenting natural scenes of manmade objects. 1 Introduction Image segmentation is the process of partitioning an image into uniform regions. Well-known image segmentation methods are based on two basic properties of pixels in relation to their local neighborhood: discontinuity and similarity, [], [3], [], for example. Many of the image segmentation methods based on discontinuity run short when portion of the edge has a small value dierence or when regions are homogeneous but very noisy. The region-based approach allows reliable computation of homogeneity statistics for a region but is not able to localize region outlines accurately. To suppress the above mentioned disadvantages, adaptive methods have been proposed combining region-splitting and edge detection techniques, [11], [6], for example. Wu [11] proposes a segmentation method in which splitting of a nonuniform region is performed along the strongest edge in it. The segmentation method by Pavlidis [6] is based on edge detection and region splitting based on the quad-tree data structure []. Although, for neighborhood referencing, the quad-tree is implementational simple and computationally ecient, its major drawback is that the image tessellation process is unable to adapt the tessellation grid to the underlying structure of the image data. To that end, we aim at following a more natural line. An adaptive split-and-merge image segmentation method is proposed designed according to the following criteria: 1. the method should be robust against partially weak edges and noisy homogeneous regions as an instance of noise in the images or model deviations in the object;. the method should be robust against dierent object border orientation and position. 3. the method should be robust against small geometrical translations of the image as an instance of registration error.. the method should be computationally ecient in the number of split and merge operations. Its novelty is in adjusting the tessellation grid to the image semantics: if a global similarity criterion dened on a connected region is not satised, pixels of the heterogeneous region lying on image boundaries are determined using local dierence measures and are used as new vertices to locally rene the tessellation grid. The paper is organized as follows. In Section, the adaptive image segmentation method is proposed. The processing steps are given in 3. Experimental results are presented in Section. The Adaptive Image Segmentation Method: Overview We use a triangular image data tessellation scheme. The Delaunay triangulation maximizes the minimum angle, minimizes the maximum circumscribing circle, and minimizes the maximum smallest enclosing circle for each triangle [8]. Because Delaunay triangulations satisfy these quality criteria, the Delaunay triangulation of a set of points tends to generate regu-
2 larly shaped triangles and is preferred over alternative triangulations as the geometric data structure in the split and merge scheme. The incremental Delaunay triangulation [5] is used for image subdivision because it can be achieved iteratively in a systematic constructive way by adding points one by one as vertices into the triangulation to locally rene the image tessellation grid. The adaptive image segmentation method is divided in three steps as follows: Initialization: Let D j denote the incremental Delaunay triangulation after j insertions of points in R. Let d j i form the ith triangle of the j th triangulation. Further, consider the function g : R! R dening an image surface g(x; y). gi j (x; y) is a compact area of g which is bounded by the vertices of triangle d j i. Because it is assumed that the image data points are limited to a rectangular image domain, the image segmentation method starts with the construction of the initial triangulation D consisting of two triangles d i for i = 1; whose vertices are the corners of g. Splitting: After the construction of D, the algorithm successively examines triangles d j i by computing the similarity predicate H(). The similarity predicate is dened on gi j denoting the underlying image data of triangle d j i. If the similarity predicate is false, edge pixels in g j i are classied topographically based on their local neighborhood by the dierence function L(). After edge detection, the splitting function S() assigns a transition error to every edge point expressing the wish to enter that point as a vertex in D j to generate the next triangulation D j1 with the goal to adapt the image tessellation grid properly to the underlying structure of the image data. The point with lowest transition error is then entered into D j to generate the next triangulation D j1. The splitting phase continues until all triangles satisfy H(). Merging: Let R i is a point set in R forming the i th polygon with corresponding r i R a compact area of the plane by merging triangular areas of the nal Delaunay triangulation (D N ). In fact, r i = g N 1 [ g N [ :::gn n where all n triangular image regions are adjacent. The merging phase starts with the triangulation produced by the splitting phase R i = d N i for all i. Function H() provides the criterion by which two adjacent polygons are merged into one. By using the same similarity predicate for the split- as well as the merge phase, the method, as a whole, will be robust against accidental splittings because accidental splittings will be recovered in the merge phase. The quality of the algorithm is determined by functions H(); L() and S(). They are discussed in the following section. 3 Processing Steps 3.1 Similarity Predicate H() We consider the similarity predicate of a region to be true if all image pixels in the region can be represented by bivariate polynomial functions [1]. If their order is not too high, region pixels are approximated by planar, quadric and cubic surfaces [1]: f m (x; y) = X ijm a ij x i y j, m 3 (1) A least-square solver calculates vector ~a and mean tting error for an arbitrarily shaped image region T : = h m (T ) = vu u t X x;yt (g(x; y)? f m (x; y)) N () where g(x; y) is the image surface and N is the total of surface interior pixels contributing to the sum. If the mean noise standard deviation in T is estimated, the mean tting error can be compared to this. If the noise is additive, stationary and has zero mean, an estimate of is obtained by a local least-square linear t to an approximately constant image patch, where edge pixels are discarded from contributing to the sum: = vu u t X x;yq (g(x; y)? f 1 (x; y)) N (3) where N is the number of pixels of a small neighborhood Q (e.g. 5x5 mask). Then, the functional homogeneity predicate dened over image region T to return a Boolean value, is as follows: H(T ) = 8 < : true; false; if h m (T ) otherwise () 3. Dierence Function L() When the homogeneity predicate H(gi j ) dened over the image data dened by the vertices of d j i is false, the image data in gi j deviates from the approximating surface and should be broken at edge points into two or more regions. To classify edge points in gi j by their topographic characterization, the output of L() is an edge type image t(x; y) : R! R consisting of:
3 Edges: Edges are found by dierentiating the image region domain. Canny's edge detector [] is used to locate edges. Corners: Corners are dened on locations where the image surface exhibits high values of isophote curvature [9]: k( ~w(x; y)) = g xg y g xy? g xx g y? g yy g x (g x g y) 3 (5) We use the corner detector of [9] which employs Gaussian-based fuzzy derivatives to calculate the equation. Y-junctions: A Y-junction is a point where three regions (edges) meet. A Y-junction provides valuable topographical descriptive information. The Y-junctions detector of [9] is used to compute Y- junctions. After edge detection, the edge type image t j i (x; y) indicates the presence of edges and their types. 3.3 Splitting Function S() After edge detection, edge pixels in the image domain of the heterogeneous triangle d j i have topographic edge labels t j i, where tj i is derived from gi j bounded by the vertices of d j i. However, only one edge point is added as a vertex to go from D j to get the next triangulation D j1. This is done as follows. Let ^p l R be the location (x; y) of an edge pixel in t j i (x; y) = l, where l denotes the edge type. Triangles d j i of Dj for which the circumcircle contains ^p l form a region R r in the plane which is called the inuence region of ^p l. Edges not shared by any two of the triangles in R r compose the inuence polygon of ^p l in D j and is denoted by R p. Then the following results are known [8]: (1) The insertion of a new vertex in D j modies triangle d j i in D j if and only if d j i is in R r ; () Let D j1 be the Delaunay triangulation obtained from D j by the insertion of ^p l. D j1 is obtained from D j by deleting all edges and triangles that are internal to R p and by connecting all vertices of R p to ^p l. Let the newly created triangles of D j1 within R p be denoted by d j1 i. We want the tting errors over all triangles d j1 D j1 to be small. Because only newly created triangles d j1 i can alter the tting error of D j1, that specic ^p l is selected which shows minimum transition error. The transition error is dened over triangles d j1 i as follows: ^p l t = jjg j1 i? f i jj d j1 i (6) where d j1 i are the newly created triangles of Dj1 obtained by the insertion of ^p l in D j, and f i is the approximating function evaluated over g j1 i which is the image surface bounded by vertices of d j1 i. In other words, ^p l t is the tting error of D j1 computed over the newly dened triangles. To minimize the tting error, for location ^p l of each edge point to exist in t j i (x; y), transition error ^p l t is computed and ^p l yielding lowest transition error min = min ^p l t (7) ^pl is taken to generate D j1. This is done by erasing from D j all triangles d j i whose circumcircle contains ^p l. Then for each triangle edges which are not shared by any two of the erased triangles, a new triangle is created with ^p l and added into D j to obtain D j1. Up to this point, no bounds have been imposed on the number of edge types to be used to compute the transition error. However, for computational reasons in the implementation, the number of dierent edge types to compute the transition error is limited to the two most prominent edge pixels, the two most prominent corners and the two most prominent T-junctions. This number is arrived at through experimentation. It has proved to be eective on our test images. 3. Merging The merging stage is similar to the merge stage of the standard split-and-merge scheme and consists of the following steps at each iteration. First the largest triangular region R i = max Rk D N (R k), where denote the triangle size, is selected as a seed for growing. Let R j, j = 1; ::; M be a neighboring polygon of seed R i. The functional homogeneity predicate H(R i S Rj ) (i.e. merge score) is computed. If H(R i S Rj ) is below the mean noise standard deviation (i.e. merge threshold), R j is merged with the seed. The merging continues with this newly merged region R i S Rj as seed until all merge-scores of neighbor triangles are larger than the merge threshold. Then the next largest unmerged triangle is taken as a new seed to grow for the next iteration. This process continues until there are no unmerged triangles left. Experiments The method has been tested on natural and synthetic images. To quantify the performance of the segmentation method, experiments have been carried out to evaluate the criteria 1- of Section 1. In the experiments, we consider the class of synthetic images where the data can be described by a piecewise smooth polynomial up to degree.

.")






4 .1 Sensitivity to Dierent Object Edge Orientations and Positions We report on the robustness of the method against dierent edge orientations. To that end, Figure 1.a has been created. Figure 1: a. First synthetic image containing various object edge orientations. b. Segmentation result. Figure : a. Second synthetic image consisting of centered circular discs of various radii. b. Segmentation result. The size of the image is 8x8 with 56 grey levels. The image consists of regions of dierent constant brightness with various region border orientation (3 o from each other). In Figure 1.b, the segmentation result is shown. Although the test image consists of dierent boundary orientations, the method yields a geometrically good and topologically sound image segmentation result (except for some minor deformations). Circular shapes are among the more dicult shapes to segment properly by Delaunay-based methods. To test the robustness of the method for circular shapes, the image of Figure.a has been created. The image consists of centered circular discs of radii r f3; ; 16; 7g pixels. Because the image is noise-free, we have mean noise standard deviation =. The segmentation result, see Figure.b, shows that the method is able to properly segment circular shapes except for some minor deformations. Most of these minor deformations are caused by the digitization of circular discs on a rectangular grid [1]. To illustrate the method, a polynomial image has been synthesized, see Figure 3.a. In Figures 3.b and 3.c, the result is shown of respectively the splitting phase and the nal segmentation. Although the test image consists of varying background brightness and objects with dierent boundary orientations and positions, the method yields a geometrically good and topologically sound image segmentation result. The number of split operations was 11 resulting in a run time of 16.9 seconds on a SPARC 1 station. Finally, we illustrate the method for a simple real image, see Figure.a. Figure 3: a. Third synthetic image composed of randomly placed geometric shapes on a background of quadratically varying intensity. b. Splitting result. c. Final result of the split and merge method. Figure : a. Recorded image consisting of three homogeneously colored objects on a homogeneously painted background. b. The splitting result superimposed on the original real image. c. The splitting result. d. The nal segmentation result. The image consists of three objects on a background. Objects consist of plastic material and painted wood. Objects were recorded with the aid of a low cost camera. The digitization was done in 8 bits. Two light sources of average day-light color were used to illuminate the objects in the scene. The size of the image was 56x56 with 56 grey levels. The order of the polynomial approximating criterion was set to m = 3. Hence, we considered the case where the image data can be described by a piecewise smooth polynomial up to order 3. The measured mean noise standard deviation is = 3:8 and hence used as the threshold for the surface tting process dened by H(). Note that the image does not contain any Y-forks. Hence, segmentation is based on edges and corners alone. The result is a proper segmentation result despite various radio-metrical and geometrical variations induced by the imaging process such as sloping intensity patches. Furthermore, the method is ecient where the number of split operations is 85 yielding a run time of 9 seconds on a SPARC 1 station.




















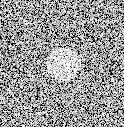

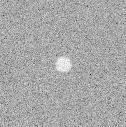
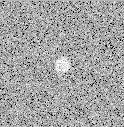
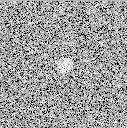
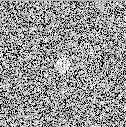

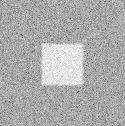
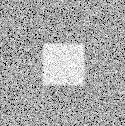
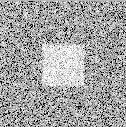
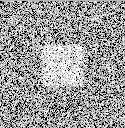
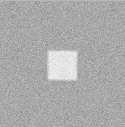
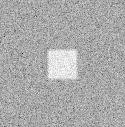
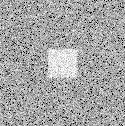

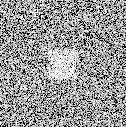

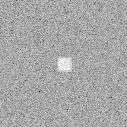
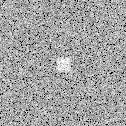
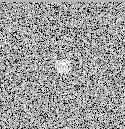
5 . Robustness to Noise In this subsection, we study the performance of the image segmentation algorithm for dierent object shapes of varying sizes in response to added noise. We experiment with synthetic images where "true" geometric features can be computed from the reference image to evaluate and compare objectively the quality of the segmentation results. In the next sections, the dataset is dened rst. Then, the error measure and experimental results are given...1 The Dataset Two basic sets of synthetic images are generated to simulate objects of dierent shapes and sizes. The size of the images are 18x18 with 56 grey-values. The rst set of images is composed of centered squares of dierent sizes s. The object value is v o = 1 and the background value is v b = 11. Images have been created for s f6; ; 3; 1g, where the area of the rectangular objects varies approximately from % of the image area, through 1%, 5% down to 1%. The second set consists of centered circular discs with dierent radii r with object value v o on the middle of a homogeneous background v b. Images of discs of radii r f3; ; 16; 7g are generated to obtain disc objects with areas from approximately %, 1% and 5% to 1% of the image area. To simulate ramp edges obtained by a camera, Gaussian smoothing with = 1: has been performed on the images. The eect of noise is produced by adding independent zero-mean additive Gaussian noise with = n to the images. The Signal-to-Noise Ratio (SNR) is dened as: SNR = ( v o? v b ) (8) n We use SN R f1; 6; 16; ; ; 1g in our experiments... Error Measures Let X be the image raster and a a binary image containing the "true" shape A dened by A = f~x X : a(~x) = 1g. Further, let b be a binary image, called the segmented image, containing the image segmentation result B = f~x X : b(~x) = 1g. Evaluation measure E compares B with A to return a numerical measure of discrepancy. Let d(~x; A) denote the shortest distance from pixel ~x X to A X, then Pratt's gure of merit F OM [7], is dened as follows: 1 E P RAT T (A; B) = ( max((a); (B)) X ~xb 1 1 d(~x; A) ) (9) where is usually set to 1=9 and we will follow suit. We prefer to use: E F OM (A; B) = 1? E P RAT T (A; B) (1) for the ease of graphical illustration...3 Results For each SNR level we have generated N = 1 images. In other words, independent Gaussian noise has been added separately at level SNR f1; 6; 16; ; ; 1g, for each noise-free image 1 times. Figure 5 shows one such dataset. Figure 5: Synthetic images of rectangles and circles with sizes corresponding to %, 1%; 5% and 1% of the image size corrupted by independent zero-mean additive Gaussian noise with SN R f1; 6; 16; ; ; 1g. Then, after segmentation, for each of the 6 realizations, E F OM is computed over the largest region and the average value over N = 1 is taken as the nal result. Figure 6 shows the average segmentation results for various shapes, sizes and SNR levels. E F OM is computed on the object boundaries. In Figure 7 experimental results of E F OM are shown for rectangles of dierent sizes for the SNR values. Results of E F OM for circles of dierent radii in response to SNR values are plotted in Figure 8. First, we concentrate on the quality of the segmentation results with respect to dierent SN R levels. For SNR <, results show a rapid decrease in the performance of the method with respect to the noise. For SNR > 16, the results get close to (for rectangles) or to a constant value (for circles), an artifact caused by the ill-dened representation of the object's
6 Figure 6: The average segmentation results for the various synthetic images of rectangles and circles with sizes corresponding to %; 1%; 5% and 1% of the image size corrupted by independent zero-mean additive Gaussian noise with SN R f1; 6; 16; ; ; 1g. EF OM (A; B) rectangle 1 % rectangle 5 % rectangle 1 % rectangle % SN R Figure 7: The average value of E F OM dierentiated for rectangles corresponding to %; 1%; 5% and 1% of the image size against the SNR. EF OM (A; B) circle 1 % circle 5 % circle 1 % circle % SN R Figure 8: The average value of E F OM dierentiated for circles corresponding to %; 1%; 5% and 1% of the image size against the SNR. boundary on the rectangular grid. The method gives good results up to considerable amounts of noise (SNR =) where object boundaries are on average within two pixels from the reference boundary, even for the smallest object. Second, attention is focused on the performance of the method for objects of dierent sizes in response to noise. Obviously, the method performs better on images with larger objects, because the error measure shows that performance accuracy increases with the size of the object. Finally, the performance of the method is studied for objects of dierent shapes with respect to the noise. The shape and slope of the curves for rectangles and circles for the same error measure do not dier signicantly except for the error introduced by the illdened representation of the circular image objects on the rectangular grid. Apart from this bias, the performance of the method is approximately the same for the two dierent shapes. 5 Discussion and Conclusion In this paper, an adaptive image segmentation method based on directed Delaunay subdivision has been proposed. Experimental results on synthetic images show that the method is robust to various object edge orientations and positions, a favorable property over many existing split and merge strategies. In addition, the method is capable of handling quadratic slopes in image intensities as is often found in natural scenes. These properties make the method much better equipped for split and merge real scenes of manmade objects. The experimental results further show that the method gives acceptable results even with considerable amounts of noise. However, under the presence of noise, the method performs better on images with larger objects. Experiment on a real image indicates that the method yields geometrically good and topologically sound image segmentation results. Apart from image segmentation, a potential use of the method is ecient image coding as for each homogeneous patch only a few coecients need to be stored. References [1] Besl, P. J. and Jain, R. C., Segmentation Trough Variable- Order Surface Fitting, IEEE PAMI, Vol. 1, No., pp , [] Canny, J., A Computational Approach to Edge Detection, IEEE PAMI, Vol. 8, No. 6, pp , [3] Haralick, R. M. and Shapiro, L. G., Survey: Image Segmentation Techniques, CVGIP, Vol. 9, pp. 1-13, [] Horowitz, S. L. and Pavlidis, T., Picture Segmentation by a Directed Split-and-Merge Procedure, In Proc. nd Int. Conf. on Pattern Recog. Copenhagen, pp. -33, 197. [5] Lee, D. L. and Schachter, B. J., Two Algorithms for Constructing a Delaunay Triangulation, Int. Journal of Comput. and Inf. Sc., Vol. 9, No. 3, pp. 19-, 198. [6] T. Pavlidis and Y. Liow, Integrating region growing and edge detection, IEEE PAMI, vol. 1, no. 3, 199, [7] Pratt, W. K., Digital Image Processing, J. Wiley, New York, [8] Rajan, V. T., Optimality of the Delaunay triangulation in R d, In Proc. 7th Annual Symp. on Comp. Geometry, pp , [9] ter Haar Romeny, B. M., Florack, L, M., J., Koenderink, J. J., Viergever, M. A., Scale-space: its Natural Operators and Dierential Invariants, In Inf. Proc. and Medical Imaging, pp , [1] Worring, M. and Smeulders, A. W. M., Digitized Circular Arcs: Characterization and Parameter Estimation, IEEE PAMI, Vol. 17, No. 6, [11] Wu, A., Adaptive Split-and-Merge Segmentation Based on Piecewise Least-Square Approximation, IEEE PAMI, Vol. 15, No. 8, 1993.
Chapter 11 Arc Extraction and Segmentation
 Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES
 GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES Karl W. Ulmer and John P. Basart Center for Nondestructive Evaluation Department of Electrical and Computer Engineering Iowa State University
GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES Karl W. Ulmer and John P. Basart Center for Nondestructive Evaluation Department of Electrical and Computer Engineering Iowa State University
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
Department of Electrical Engineering, Keio University Hiyoshi Kouhoku-ku Yokohama 223, Japan
 Shape Modeling from Multiple View Images Using GAs Satoshi KIRIHARA and Hideo SAITO Department of Electrical Engineering, Keio University 3-14-1 Hiyoshi Kouhoku-ku Yokohama 223, Japan TEL +81-45-563-1141
Shape Modeling from Multiple View Images Using GAs Satoshi KIRIHARA and Hideo SAITO Department of Electrical Engineering, Keio University 3-14-1 Hiyoshi Kouhoku-ku Yokohama 223, Japan TEL +81-45-563-1141
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
2) For any triangle edge not on the boundary, there is exactly one neighboring
 For any triangle edge not on the boundary, there is exactly one neighboring") Triangulating Trimmed NURBS Surfaces Chang Shu and Pierre Boulanger Abstract. This paper describes techniques for the piecewise linear approximation of trimmed NURBS surfaces. The problem, called surface
Triangulating Trimmed NURBS Surfaces Chang Shu and Pierre Boulanger Abstract. This paper describes techniques for the piecewise linear approximation of trimmed NURBS surfaces. The problem, called surface
Prewitt. Gradient. Image. Op. Merging of Small Regions. Curve Approximation. and
 A RULE-BASED SYSTEM FOR REGION SEGMENTATION IMPROVEMENT IN STEREOVISION M. Buvry, E. Zagrouba and C. J. Krey ENSEEIHT - IRIT - UA 1399 CNRS Vision par Calculateur A. Bruel 2 Rue Camichel, 31071 Toulouse
A RULE-BASED SYSTEM FOR REGION SEGMENTATION IMPROVEMENT IN STEREOVISION M. Buvry, E. Zagrouba and C. J. Krey ENSEEIHT - IRIT - UA 1399 CNRS Vision par Calculateur A. Bruel 2 Rue Camichel, 31071 Toulouse
Chapter 7. Conclusions
 132 Spatial Data Representations Chapter 7. Conclusions This dissertation has addressed three current problems with spatial data representations. First is the need for data representations that support
132 Spatial Data Representations Chapter 7. Conclusions This dissertation has addressed three current problems with spatial data representations. First is the need for data representations that support
Part 3: Image Processing
 Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
EDGE BASED REGION GROWING
 EDGE BASED REGION GROWING Rupinder Singh, Jarnail Singh Preetkamal Sharma, Sudhir Sharma Abstract Image segmentation is a decomposition of scene into its components. It is a key step in image analysis.
EDGE BASED REGION GROWING Rupinder Singh, Jarnail Singh Preetkamal Sharma, Sudhir Sharma Abstract Image segmentation is a decomposition of scene into its components. It is a key step in image analysis.
Fast unstructured quadrilateral mesh generation
 Fast unstructured quadrilateral mesh generation Andrew Giuliani a, Lilia Krivodonova a, a Department of Applied Mathematics, University of Waterloo Abstract We present a novel approach for the indirect
Fast unstructured quadrilateral mesh generation Andrew Giuliani a, Lilia Krivodonova a, a Department of Applied Mathematics, University of Waterloo Abstract We present a novel approach for the indirect
Example 2: Straight Lines. Image Segmentation. Example 3: Lines and Circular Arcs. Example 1: Regions
 Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example : Straight Lines. into
Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example : Straight Lines. into
Example 1: Regions. Image Segmentation. Example 3: Lines and Circular Arcs. Example 2: Straight Lines. Region Segmentation: Segmentation Criteria
 Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example 1: Regions. into linear
Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example 1: Regions. into linear
spline structure and become polynomials on cells without collinear edges. Results of this kind follow from the intrinsic supersmoothness of bivariate
 Supersmoothness of bivariate splines and geometry of the underlying partition. T. Sorokina ) Abstract. We show that many spaces of bivariate splines possess additional smoothness (supersmoothness) that
Supersmoothness of bivariate splines and geometry of the underlying partition. T. Sorokina ) Abstract. We show that many spaces of bivariate splines possess additional smoothness (supersmoothness) that
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Adaptative Elimination of False Edges for First Order Detectors
 Adaptative Elimination of False Edges for First Order Detectors Djemel ZIOU and Salvatore TABBONE D~partement de math~matiques et d'informatique, universit~ de Sherbrooke, Qc, Canada, J1K 2R1 Crin/Cnrs
Adaptative Elimination of False Edges for First Order Detectors Djemel ZIOU and Salvatore TABBONE D~partement de math~matiques et d'informatique, universit~ de Sherbrooke, Qc, Canada, J1K 2R1 Crin/Cnrs
Experiments with Edge Detection using One-dimensional Surface Fitting
 Experiments with Edge Detection using One-dimensional Surface Fitting Gabor Terei, Jorge Luis Nunes e Silva Brito The Ohio State University, Department of Geodetic Science and Surveying 1958 Neil Avenue,
Experiments with Edge Detection using One-dimensional Surface Fitting Gabor Terei, Jorge Luis Nunes e Silva Brito The Ohio State University, Department of Geodetic Science and Surveying 1958 Neil Avenue,
Triangular Mesh Segmentation Based On Surface Normal
 ACCV2002: The 5th Asian Conference on Computer Vision, 23--25 January 2002, Melbourne, Australia. Triangular Mesh Segmentation Based On Surface Normal Dong Hwan Kim School of Electrical Eng. Seoul Nat
ACCV2002: The 5th Asian Conference on Computer Vision, 23--25 January 2002, Melbourne, Australia. Triangular Mesh Segmentation Based On Surface Normal Dong Hwan Kim School of Electrical Eng. Seoul Nat
coding of various parts showing different features, the possibility of rotation or of hiding covering parts of the object's surface to gain an insight
 Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Chapter 10: Image Segmentation. Office room : 841
 Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
Chapter 3. Sukhwinder Singh
 Chapter 3 Sukhwinder Singh PIXEL ADDRESSING AND OBJECT GEOMETRY Object descriptions are given in a world reference frame, chosen to suit a particular application, and input world coordinates are ultimately
Chapter 3 Sukhwinder Singh PIXEL ADDRESSING AND OBJECT GEOMETRY Object descriptions are given in a world reference frame, chosen to suit a particular application, and input world coordinates are ultimately
Object Modeling from Multiple Images Using Genetic Algorithms. Hideo SAITO and Masayuki MORI. Department of Electrical Engineering, Keio University
 Object Modeling from Multiple Images Using Genetic Algorithms Hideo SAITO and Masayuki MORI Department of Electrical Engineering, Keio University E-mail: saito@ozawa.elec.keio.ac.jp Abstract This paper
Object Modeling from Multiple Images Using Genetic Algorithms Hideo SAITO and Masayuki MORI Department of Electrical Engineering, Keio University E-mail: saito@ozawa.elec.keio.ac.jp Abstract This paper
Segmentation algorithm for monochrome images generally are based on one of two basic properties of gray level values: discontinuity and similarity.
 Chapter - 3 : IMAGE SEGMENTATION Segmentation subdivides an image into its constituent s parts or objects. The level to which this subdivision is carried depends on the problem being solved. That means
Chapter - 3 : IMAGE SEGMENTATION Segmentation subdivides an image into its constituent s parts or objects. The level to which this subdivision is carried depends on the problem being solved. That means
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
CSG obj. oper3. obj1 obj2 obj3. obj5. obj4
 Solid Modeling Solid: Boundary + Interior Volume occupied by geometry Solid representation schemes Constructive Solid Geometry (CSG) Boundary representations (B-reps) Space-partition representations Operations
Solid Modeling Solid: Boundary + Interior Volume occupied by geometry Solid representation schemes Constructive Solid Geometry (CSG) Boundary representations (B-reps) Space-partition representations Operations
DATA MODELS IN GIS. Prachi Misra Sahoo I.A.S.R.I., New Delhi
 DATA MODELS IN GIS Prachi Misra Sahoo I.A.S.R.I., New Delhi -110012 1. Introduction GIS depicts the real world through models involving geometry, attributes, relations, and data quality. Here the realization
DATA MODELS IN GIS Prachi Misra Sahoo I.A.S.R.I., New Delhi -110012 1. Introduction GIS depicts the real world through models involving geometry, attributes, relations, and data quality. Here the realization
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
A Keypoint Descriptor Inspired by Retinal Computation
 A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
Figure 1: An Area Voronoi Diagram of a typical GIS Scene generated from the ISPRS Working group III/3 Avenches data set. 2 ARRANGEMENTS 2.1 Voronoi Di
 Qualitative Spatial Relations using Arrangements for Complex Images M. Burge and W. Burger Johannes Kepler University, Department of Systems Science Computer Vision Laboratory, A-4040 Linz, Austria burge@cast.uni-linz.ac.at
Qualitative Spatial Relations using Arrangements for Complex Images M. Burge and W. Burger Johannes Kepler University, Department of Systems Science Computer Vision Laboratory, A-4040 Linz, Austria burge@cast.uni-linz.ac.at
Comparison between Various Edge Detection Methods on Satellite Image
 Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Experiments in Curvature-Based Segmentation of Range Data. Emanuele Trucco and Robert B. Fisher. Department of Articial Intelligence, Abstract
 Experiments in Curvature-Based Segmentation of Range Data Emanuele Trucco and Robert B. Fisher Department of Articial Intelligence, University of Edinburgh, Edinburgh, Scotland. Abstract This paper focuses
Experiments in Curvature-Based Segmentation of Range Data Emanuele Trucco and Robert B. Fisher Department of Articial Intelligence, University of Edinburgh, Edinburgh, Scotland. Abstract This paper focuses
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
N. Hitschfeld. Blanco Encalada 2120, Santiago, CHILE.
 Generalization of modied octrees for geometric modeling N. Hitschfeld Dpto. Ciencias de la Computacion, Univ. de Chile Blanco Encalada 2120, Santiago, CHILE E-mail: nancy@dcc.uchile.cl Abstract. This paper
Generalization of modied octrees for geometric modeling N. Hitschfeld Dpto. Ciencias de la Computacion, Univ. de Chile Blanco Encalada 2120, Santiago, CHILE E-mail: nancy@dcc.uchile.cl Abstract. This paper
Computer Vision. Image Segmentation. 10. Segmentation. Computer Engineering, Sejong University. Dongil Han
 Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
LATEST TRENDS on APPLIED MATHEMATICS, SIMULATION, MODELLING
 3D surface reconstruction of objects by using stereoscopic viewing Baki Koyuncu, Kurtuluş Küllü bkoyuncu@ankara.edu.tr kkullu@eng.ankara.edu.tr Computer Engineering Department, Ankara University, Ankara,
3D surface reconstruction of objects by using stereoscopic viewing Baki Koyuncu, Kurtuluş Küllü bkoyuncu@ankara.edu.tr kkullu@eng.ankara.edu.tr Computer Engineering Department, Ankara University, Ankara,
Using Game Theory for Image Segmentation
 Using Game Theory for Image Segmentation Elizabeth Cassell Sumanth Kolar Alex Yakushev 1 Introduction 21st March 2007 The goal of image segmentation, is to distinguish objects from background. Robust segmentation
Using Game Theory for Image Segmentation Elizabeth Cassell Sumanth Kolar Alex Yakushev 1 Introduction 21st March 2007 The goal of image segmentation, is to distinguish objects from background. Robust segmentation
Parallel Computation of Spherical Parameterizations for Mesh Analysis. Th. Athanasiadis and I. Fudos University of Ioannina, Greece
 Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Document Image Restoration Using Binary Morphological Filters. Jisheng Liang, Robert M. Haralick. Seattle, Washington Ihsin T.
 Document Image Restoration Using Binary Morphological Filters Jisheng Liang, Robert M. Haralick University of Washington, Department of Electrical Engineering Seattle, Washington 98195 Ihsin T. Phillips
Document Image Restoration Using Binary Morphological Filters Jisheng Liang, Robert M. Haralick University of Washington, Department of Electrical Engineering Seattle, Washington 98195 Ihsin T. Phillips
Content-based Image and Video Retrieval. Image Segmentation
 Content-based Image and Video Retrieval Vorlesung, SS 2011 Image Segmentation 2.5.2011 / 9.5.2011 Image Segmentation One of the key problem in computer vision Identification of homogenous region in the
Content-based Image and Video Retrieval Vorlesung, SS 2011 Image Segmentation 2.5.2011 / 9.5.2011 Image Segmentation One of the key problem in computer vision Identification of homogenous region in the
Gaussian-Weighted Moving-Window Robust Automatic Threshold Selection
 Gaussian-Weighted Moving-Window Robust Automatic Threshold Selection Michael H. F. Wilkinson Institute for Mathematics and Computing Science, University of Groningen, P.O. Box 800, 9700 AV Groningen, The
Gaussian-Weighted Moving-Window Robust Automatic Threshold Selection Michael H. F. Wilkinson Institute for Mathematics and Computing Science, University of Groningen, P.O. Box 800, 9700 AV Groningen, The
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Definiens. Professional 5. Reference Book. Definiens AG.
 Definiens Professional 5 Reference Book Definiens AG www.definiens.com 1 Algorithms Reference Imprint and Version Document Version 5.0.6.1 Copyright 2006 Definiens AG. All rights reserved. This document
Definiens Professional 5 Reference Book Definiens AG www.definiens.com 1 Algorithms Reference Imprint and Version Document Version 5.0.6.1 Copyright 2006 Definiens AG. All rights reserved. This document
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
Edge detection. Stefano Ferrari. Università degli Studi di Milano Elaborazione delle immagini (Image processing I)
") Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Model-based segmentation and recognition from range data
 Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES
 SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES 1 B.THAMOTHARAN, 2 M.MENAKA, 3 SANDHYA VAIDYANATHAN, 3 SOWMYA RAVIKUMAR 1 Asst. Prof.,
SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES 1 B.THAMOTHARAN, 2 M.MENAKA, 3 SANDHYA VAIDYANATHAN, 3 SOWMYA RAVIKUMAR 1 Asst. Prof.,
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Digital Image Analysis and Processing
 Digital Image Analysis and Processing CPE 0907544 Image Segmentation Part II Chapter 10 Sections : 10.3 10.4 Dr. Iyad Jafar Outline Introduction Thresholdingh Fundamentals Basic Global Thresholding Optimal
Digital Image Analysis and Processing CPE 0907544 Image Segmentation Part II Chapter 10 Sections : 10.3 10.4 Dr. Iyad Jafar Outline Introduction Thresholdingh Fundamentals Basic Global Thresholding Optimal
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Determining Differences between Two Sets of Polygons
 Determining Differences between Two Sets of Polygons MATEJ GOMBOŠI, BORUT ŽALIK Institute for Computer Science Faculty of Electrical Engineering and Computer Science, University of Maribor Smetanova 7,
Determining Differences between Two Sets of Polygons MATEJ GOMBOŠI, BORUT ŽALIK Institute for Computer Science Faculty of Electrical Engineering and Computer Science, University of Maribor Smetanova 7,
EDGE DETECTION-APPLICATION OF (FIRST AND SECOND) ORDER DERIVATIVE IN IMAGE PROCESSING
 ORDER DERIVATIVE IN IMAGE PROCESSING") Diyala Journal of Engineering Sciences Second Engineering Scientific Conference College of Engineering University of Diyala 16-17 December. 2015, pp. 430-440 ISSN 1999-8716 Printed in Iraq EDGE DETECTION-APPLICATION
Diyala Journal of Engineering Sciences Second Engineering Scientific Conference College of Engineering University of Diyala 16-17 December. 2015, pp. 430-440 ISSN 1999-8716 Printed in Iraq EDGE DETECTION-APPLICATION
Applications. Oversampled 3D scan data. ~150k triangles ~80k triangles
 Mesh Simplification Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies for efficient
Mesh Simplification Applications Oversampled 3D scan data ~150k triangles ~80k triangles 2 Applications Overtessellation: E.g. iso-surface extraction 3 Applications Multi-resolution hierarchies for efficient
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They can be performed sequentially or simultaneou
 Model tting They can be performed sequentially or simultaneou") an edge image, nd line or curve segments present Given the image. in Line and Curves Detection 1 Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They
an edge image, nd line or curve segments present Given the image. in Line and Curves Detection 1 Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They
Texture Segmentation by Windowed Projection
 Texture Segmentation by Windowed Projection 1, 2 Fan-Chen Tseng, 2 Ching-Chi Hsu, 2 Chiou-Shann Fuh 1 Department of Electronic Engineering National I-Lan Institute of Technology e-mail : fctseng@ccmail.ilantech.edu.tw
Texture Segmentation by Windowed Projection 1, 2 Fan-Chen Tseng, 2 Ching-Chi Hsu, 2 Chiou-Shann Fuh 1 Department of Electronic Engineering National I-Lan Institute of Technology e-mail : fctseng@ccmail.ilantech.edu.tw
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Local qualitative shape from stereo. without detailed correspondence. Extended Abstract. Shimon Edelman. Internet:
 Local qualitative shape from stereo without detailed correspondence Extended Abstract Shimon Edelman Center for Biological Information Processing MIT E25-201, Cambridge MA 02139 Internet: edelman@ai.mit.edu
Local qualitative shape from stereo without detailed correspondence Extended Abstract Shimon Edelman Center for Biological Information Processing MIT E25-201, Cambridge MA 02139 Internet: edelman@ai.mit.edu
Image segmentation. Stefano Ferrari. Università degli Studi di Milano Methods for Image Processing. academic year
 Image segmentation Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2017 2018 Segmentation by thresholding Thresholding is the simplest
Image segmentation Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2017 2018 Segmentation by thresholding Thresholding is the simplest
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Parameterization with Manifolds
 Parameterization with Manifolds Manifold What they are Why they re difficult to use When a mesh isn t good enough Problem areas besides surface models A simple manifold Sphere, torus, plane, etc. Using
Parameterization with Manifolds Manifold What they are Why they re difficult to use When a mesh isn t good enough Problem areas besides surface models A simple manifold Sphere, torus, plane, etc. Using
COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS
 COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS Shubham Saini 1, Bhavesh Kasliwal 2, Shraey Bhatia 3 1 Student, School of Computing Science and Engineering, Vellore Institute of Technology, India,
COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS Shubham Saini 1, Bhavesh Kasliwal 2, Shraey Bhatia 3 1 Student, School of Computing Science and Engineering, Vellore Institute of Technology, India,
Edge Detection. CS664 Computer Vision. 3. Edges. Several Causes of Edges. Detecting Edges. Finite Differences. The Gradient
 Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Digital Image Processing. Prof. P.K. Biswas. Department of Electronics & Electrical Communication Engineering
 Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
sizes. Section 5 briey introduces some of the possible applications of the algorithm. Finally, we draw some conclusions in Section 6. 2 MasPar Archite
 Parallelization of 3-D Range Image Segmentation on a SIMD Multiprocessor Vipin Chaudhary and Sumit Roy Bikash Sabata Parallel and Distributed Computing Laboratory SRI International Wayne State University
Parallelization of 3-D Range Image Segmentation on a SIMD Multiprocessor Vipin Chaudhary and Sumit Roy Bikash Sabata Parallel and Distributed Computing Laboratory SRI International Wayne State University
CSCI 4620/8626. Coordinate Reference Frames
 CSCI 4620/8626 Computer Graphics Graphics Output Primitives Last update: 2014-02-03 Coordinate Reference Frames To describe a picture, the world-coordinate reference frame (2D or 3D) must be selected.
CSCI 4620/8626 Computer Graphics Graphics Output Primitives Last update: 2014-02-03 Coordinate Reference Frames To describe a picture, the world-coordinate reference frame (2D or 3D) must be selected.
Mathematics of Surfaces VII 1 the (piecewise) functional case [Duc79], [Pow94]. More sophisticated linearizations of the fairness functional are used
![Mathematics of Surfaces VII 1 the (piecewise) functional case [Duc79], [Pow94]. More sophisticated linearizations of the fairness functional are used](/thumbs/93/114105136.jpg "Mathematics of Surfaces VII 1 the (piecewise) functional case [Duc79], [Pow94]. More sophisticated linearizations of the fairness functional are used") Discrete Fairing Leif Kobbelt University of Erlangen-Nurnberg Abstract We address the general problem of, given a triangular net of arbitrary topology in IR 3, nd a rened net which contains the original
Discrete Fairing Leif Kobbelt University of Erlangen-Nurnberg Abstract We address the general problem of, given a triangular net of arbitrary topology in IR 3, nd a rened net which contains the original
Dominating Sets in Planar Graphs 1
 Dominating Sets in Planar Graphs 1 Lesley R. Matheson 2 Robert E. Tarjan 2; May, 1994 Abstract Motivated by an application to unstructured multigrid calculations, we consider the problem of asymptotically
Dominating Sets in Planar Graphs 1 Lesley R. Matheson 2 Robert E. Tarjan 2; May, 1994 Abstract Motivated by an application to unstructured multigrid calculations, we consider the problem of asymptotically
CS 532: 3D Computer Vision 14 th Set of Notes
 1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
Two Algorithms for Adaptive Approximation of Bivariate Functions by Piecewise Linear Polynomials on Triangulations
 Two Algorithms for Adaptive Approximation of Bivariate Functions by Piecewise Linear Polynomials on Triangulations Nira Dyn School of Mathematical Sciences Tel Aviv University, Israel First algorithm from
Two Algorithms for Adaptive Approximation of Bivariate Functions by Piecewise Linear Polynomials on Triangulations Nira Dyn School of Mathematical Sciences Tel Aviv University, Israel First algorithm from
REGION & EDGE BASED SEGMENTATION
 INF 4300 Digital Image Analysis REGION & EDGE BASED SEGMENTATION Today We go through sections 10.1, 10.2.7 (briefly), 10.4, 10.5, 10.6.1 We cover the following segmentation approaches: 1. Edge-based segmentation
INF 4300 Digital Image Analysis REGION & EDGE BASED SEGMENTATION Today We go through sections 10.1, 10.2.7 (briefly), 10.4, 10.5, 10.6.1 We cover the following segmentation approaches: 1. Edge-based segmentation
Algorithms for GIS. Spatial data: Models and representation (part I) Laura Toma. Bowdoin College
 Laura Toma. Bowdoin College") Algorithms for GIS Spatial data: Models and representation (part I) Laura Toma Bowdoin College Outline Spatial data in GIS applications Point data Networks Terrains Planar maps and meshes Data structures
Algorithms for GIS Spatial data: Models and representation (part I) Laura Toma Bowdoin College Outline Spatial data in GIS applications Point data Networks Terrains Planar maps and meshes Data structures
= f (a, b) + (hf x + kf y ) (a,b) +
 + (hf x + kf y ) (a,b) +") Chapter 14 Multiple Integrals 1 Double Integrals, Iterated Integrals, Cross-sections 2 Double Integrals over more general regions, Definition, Evaluation of Double Integrals, Properties of Double Integrals
Chapter 14 Multiple Integrals 1 Double Integrals, Iterated Integrals, Cross-sections 2 Double Integrals over more general regions, Definition, Evaluation of Double Integrals, Properties of Double Integrals
Parameterization of Triangular Meshes with Virtual Boundaries
 Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Evaluation of Interest Point Detectors
 Evaluation of Interest Point Detectors Cordelia Schmid, Roger Mohr, Christian Bauckhage To cite this version: Cordelia Schmid, Roger Mohr, Christian Bauckhage. Evaluation of Interest Point Detectors. International
Evaluation of Interest Point Detectors Cordelia Schmid, Roger Mohr, Christian Bauckhage To cite this version: Cordelia Schmid, Roger Mohr, Christian Bauckhage. Evaluation of Interest Point Detectors. International
EN1610 Image Understanding Lab # 3: Edges
 EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
Processing and Others. Xiaojun Qi -- REU Site Program in CVMA
 Advanced Digital Image Processing and Others Xiaojun Qi -- REU Site Program in CVMA (0 Summer) Segmentation Outline Strategies and Data Structures Overview of Algorithms Region Splitting Region Merging
Advanced Digital Image Processing and Others Xiaojun Qi -- REU Site Program in CVMA (0 Summer) Segmentation Outline Strategies and Data Structures Overview of Algorithms Region Splitting Region Merging
Proceedings of the 6th Int. Conf. on Computer Analysis of Images and Patterns. Direct Obstacle Detection and Motion. from Spatio-Temporal Derivatives
 Proceedings of the 6th Int. Conf. on Computer Analysis of Images and Patterns CAIP'95, pp. 874-879, Prague, Czech Republic, Sep 1995 Direct Obstacle Detection and Motion from Spatio-Temporal Derivatives
Proceedings of the 6th Int. Conf. on Computer Analysis of Images and Patterns CAIP'95, pp. 874-879, Prague, Czech Republic, Sep 1995 Direct Obstacle Detection and Motion from Spatio-Temporal Derivatives
Segmentation of Images
 Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Generation of Triangle Meshes from Time-of-Flight Data for Surface Registration
 Generation of Triangle Meshes from Time-of-Flight Data for Surface Registration Thomas Kilgus, Thiago R. dos Santos, Alexander Seitel, Kwong Yung, Alfred M. Franz, Anja Groch, Ivo Wolf, Hans-Peter Meinzer,
Generation of Triangle Meshes from Time-of-Flight Data for Surface Registration Thomas Kilgus, Thiago R. dos Santos, Alexander Seitel, Kwong Yung, Alfred M. Franz, Anja Groch, Ivo Wolf, Hans-Peter Meinzer,
Exploring Curve Fitting for Fingers in Egocentric Images
 Exploring Curve Fitting for Fingers in Egocentric Images Akanksha Saran Robotics Institute, Carnegie Mellon University 16-811: Math Fundamentals for Robotics Final Project Report Email: asaran@andrew.cmu.edu
Exploring Curve Fitting for Fingers in Egocentric Images Akanksha Saran Robotics Institute, Carnegie Mellon University 16-811: Math Fundamentals for Robotics Final Project Report Email: asaran@andrew.cmu.edu
Mesh Repairing and Simplification. Gianpaolo Palma
 Mesh Repairing and Simplification Gianpaolo Palma Mesh Repairing Removal of artifacts from geometric model such that it becomes suitable for further processing Input: a generic 3D model Output: (hopefully)a
Mesh Repairing and Simplification Gianpaolo Palma Mesh Repairing Removal of artifacts from geometric model such that it becomes suitable for further processing Input: a generic 3D model Output: (hopefully)a
An Efficient Single Chord-based Accumulation Technique (SCA) to Detect More Reliable Corners
 to Detect More Reliable Corners") An Efficient Single Chord-based Accumulation Technique (SCA) to Detect More Reliable Corners Mohammad Asiful Hossain, Abdul Kawsar Tushar, and Shofiullah Babor Computer Science and Engineering Department,
An Efficient Single Chord-based Accumulation Technique (SCA) to Detect More Reliable Corners Mohammad Asiful Hossain, Abdul Kawsar Tushar, and Shofiullah Babor Computer Science and Engineering Department,
Interpretation of Urban Surface Models using 2D Building Information Norbert Haala and Claus Brenner Institut fur Photogrammetrie Universitat Stuttgar
 Interpretation of Urban Surface Models using 2D Building Information Norbert Haala and Claus Brenner Institut fur Photogrammetrie Universitat Stuttgart Geschwister-Scholl-Strae 24, 70174 Stuttgart, Germany
Interpretation of Urban Surface Models using 2D Building Information Norbert Haala and Claus Brenner Institut fur Photogrammetrie Universitat Stuttgart Geschwister-Scholl-Strae 24, 70174 Stuttgart, Germany
x1_nearest x2_nearest Implicit Surface:[ f(x)=0,b(x)= false ]
![x1_nearest x2_nearest Implicit Surface:[ f(x)=0,b(x)= false ]](/thumbs/88/115374031.jpg "x1_nearest x2_nearest Implicit Surface:[ f(x)=0,b(x)= false ]") Marching Triangles: Delaunay Implicit Surface Triangulation A.Hilton 1 and J.Illingworth Vision, Speech and Signal Processing Group, Department of Electronic and Electrical Engineering University of Surrey,
Marching Triangles: Delaunay Implicit Surface Triangulation A.Hilton 1 and J.Illingworth Vision, Speech and Signal Processing Group, Department of Electronic and Electrical Engineering University of Surrey,
HOUGH TRANSFORM. Plan for today. Introduction to HT. An image with linear structures. INF 4300 Digital Image Analysis
 INF 4300 Digital Image Analysis HOUGH TRANSFORM Fritz Albregtsen 14.09.2011 Plan for today This lecture goes more in detail than G&W 10.2! Introduction to Hough transform Using gradient information to
INF 4300 Digital Image Analysis HOUGH TRANSFORM Fritz Albregtsen 14.09.2011 Plan for today This lecture goes more in detail than G&W 10.2! Introduction to Hough transform Using gradient information to
Free-Form Deformation (FFD)
") Chapter 14 Free-Form Deformation (FFD) Free-form deformation (FFD) is a technique for manipulating any shape in a free-form manner. Pierre Bézier used this idea to manipulate large numbers of control points
Chapter 14 Free-Form Deformation (FFD) Free-form deformation (FFD) is a technique for manipulating any shape in a free-form manner. Pierre Bézier used this idea to manipulate large numbers of control points
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Aspect-Ratio Voronoi Diagram with Applications
 Aspect-Ratio Voronoi Diagram with Applications Tetsuo Asano School of Information Science, JAIST (Japan Advanced Institute of Science and Technology), Japan 1-1 Asahidai, Nomi, Ishikawa, 923-1292, Japan
Aspect-Ratio Voronoi Diagram with Applications Tetsuo Asano School of Information Science, JAIST (Japan Advanced Institute of Science and Technology), Japan 1-1 Asahidai, Nomi, Ishikawa, 923-1292, Japan
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS.
 SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
A Developer s Survey of Polygonal Simplification algorithms. CS 563 Advanced Topics in Computer Graphics Fan Wu Mar. 31, 2005
 A Developer s Survey of Polygonal Simplification algorithms CS 563 Advanced Topics in Computer Graphics Fan Wu Mar. 31, 2005 Some questions to ask Why simplification? What are my models like? What matters
A Developer s Survey of Polygonal Simplification algorithms CS 563 Advanced Topics in Computer Graphics Fan Wu Mar. 31, 2005 Some questions to ask Why simplification? What are my models like? What matters
Intro to Modeling Modeling in 3D
 Intro to Modeling Modeling in 3D Polygon sets can approximate more complex shapes as discretized surfaces 2 1 2 3 Curve surfaces in 3D Sphere, ellipsoids, etc Curved Surfaces Modeling in 3D ) ( 2 2 2 2
Intro to Modeling Modeling in 3D Polygon sets can approximate more complex shapes as discretized surfaces 2 1 2 3 Curve surfaces in 3D Sphere, ellipsoids, etc Curved Surfaces Modeling in 3D ) ( 2 2 2 2