Spatial Pattern Templates for Recognition of Objects with Regular Structure
|
|
|
- Esmond Randolph Harris
- 6 years ago
- Views:
Transcription
1 Spatial Pattern Templates for Recognition of Objects with Regular Structure Radim Tyleček and Radim Šára Center for Machine Perception Czech Technical University in Prague Abstract. We propose a method for semantic parsing of images with regular structure. The structured objects are modeled in a densely connected CRF. The paper describes how to embody specific spatial relations in a representation called Spatial Pattern Templates (SPT), which allows us to capture regularity constraints of alignment and equal spacing in pairwise and ternary potentials. Assuming the input image is pre-segmented to salient regions the SPT describe which segments could interact in the structured graphical model. The model parameters are learnt to describe the formal language of semantic labelings. Given an input image, a consistent labeling over its segments linked in the CRF is recognized as a word from this language. The CRF framework allows us to apply efficient algorithms for both recognition and learning. We demonstrate the approach on the problem of facade image parsing and show that results comparable with state of the art methods are achieved without introducing additional manually designed detectors for specific terminal objects. 1 Introduction The recent development in the areas of object detection and image segmentation is centered around the incorporation of contextual cues. Published results confirm the hypothesis that modeling relations between neighboring pixels or segments (superpixels) can significantly improve recognition accuracy for structured data. The first choice one has to make here is to choose the neighbor relation, or in other words, which primitive elements participate in constraints on labels. The constraints are usually specified with a formal language of spatial arrangements. A common choice for the relation is the adjacency of element pairs in the image plane, such as 4 or 8-neighborhood of pixels in a grid, which supports the language model [1]. This can be extended in various directions: In depth when we have more concurrent segmentations, or in cardinality when we connect more elements together. Generally speaking, in this paper we will take a closer look on this design process and introduce a concept called Spatial Pattern Templates (SPT). A convenient framework to embed such patterns into are probabilistic graphical models, where image elements correspond to nodes and edges (or higher-order cliques) to the relations among them. In such a graph, our pattern templates
2 2 Radim Tyleček and Radim Šára correspond to cliques or factors, as they describe how a given joint probability factorizes. We choose Conditional Random Fields (CRF [9]) as a suitable model, which allows us to concentrate on the element relations and not to care much about how the data are generated. Specifically, we propose pattern templates to deal with regular segmentations and call them Aligned Pairs (AP) and Regular Triplets (RT). We identify regular segmentations as those where object geometry, shape or appearance exhibit symmetry, particularly translational, which manifests in alignment and similarity. Such principles often apply to images with man-made objects, even though such phenomena are also common in the nature. Urban scenes have some of the most regular yet variable segmentations and their semantic analysis is receiving more attention nowadays, as it can aid other computer vision tasks such as image-based urban reconstruction. We design our method with this application in mind, specifically targeting parsing of facade images (a multi-class labeling problem). In this task, we exploit the properties of largely orthogonal facade images. We start by training a classifier to recognize the patches given by unsupervised segmentation. Based on the initial segments we build a CRF with binary relative location potentials on AP and ternary label consistency potentials on RT. For intuition, this can be seen as a process where all segments jointly vote for terminal labels of the other segments, with voting scheme following the chosen spatial patterns. The concept of template design, its embedding in the CRF and implementation for regular objects with Regular Triplets and Aligned Pairs are the contributions of this paper. 2 Related work Contextual models. Relative location prior on label pairs is used in [4] for multiclass segmentation. Every segment votes for the label of all other segments based on their relative location and classifier output. Ideally, such interactions should be modeled with a complete graph CRF, where an edge expresses the joint probability of the two labels given their relative location, but this would soon make the inference intractable with the growing number of segments. Instead Gould et al. [4] resort to a voting scheme and use CRF with pairwise terms for directly adjacent segments only. In our approach, we include the discretized relative location prior in a CRF but limit the number of interactions by choosing a suitable pattern template. CRFs are popular for high-level vision tasks also thanks to the number of algorithms available for inference and learning [11]. However, useful exact algorithms are known only for a specific class of potential functions (obeying submodularity). Kohli et al. [5] fit in this limitation with a robust version of a generalized Potts model, which softly enforces label consistency among any number of elements in a high order clique (pixels in segments). We can use this model for RT, but because the pairwise relative location potentials may have arbitrary form, we cannot apply the efficient α-expansion optimization used in [5].
3 Spatial Pattern Templates for Recognition of Objects with Regular Structure 3 Structure learning. A number of methods for learning general structures on graphs have been recently developed [3, 12, 13]. They learn edge-specific weights in a fully connected graph, which is directly tractable only when the number of nodes n is small (10 segments and 4 spatial relations in [3]) due to edge number growing with O(n 2 ). Scalability of the approach has been extended by Schmidt et al. by block-wise regularization for sparsity [12] (16 segments) and subsequently also for higher-order potentials with a hierarchical constraint [13] (30 segments). Since we deal with 500 segments, this approach cannot be directly applied and, as suggested in [12], a restriction on the edge set has to be considered. The SPT can be here seen as a principled implementation of this restriction to keep the problem tractable. Facade parsing. There are two major approaches to the facade parsing problem. Top-down approach relies on the construction of a generative rule set, usually a grammar, and the result is obtained stochastically as a word in the language best matching the input image [14]. So far there are no methods for automatic construction of the grammars and they do not generalize well outside of the style they were designed for. Learning is possible for very simple grammars (e.g. grid [17]) but it cannot express other structural relations. Bottom-up approaches instead combine weak general principles, which are more flexible and their parameters can be learned. Regularity of spacing, shape similarity and alignment is used in [18] to find weakly regular structures, but the model cannot be simply extended for more classes than one (window). The hierarchical CRF [8], which aggregates information from multiple segmentations at different scales, has been applied to facades in [19], where binary potentials model consistency of adjacent labels within as well as across segmentations. Here neighboring segments with similar appearance are more likely to have the same label (contrast-sensitive Potts model). The recent three-staged method [10] combines local and object detectors with a binary Potts CRF on pixels. The result is further sequentially processed to adjust the labels according to the alignment, similarity, symmetry and co-occurence principles, each of them applied with a rather heuristic procedure. Additional principles are designed for a specific dataset and in fact resemble grammatical rules. In contrast, our method accommodates the general assumption of regularity in a principled and general way as a part of the model, which is based on the CRF and can benefit from the joint learning and inference. 3 Spatial Pattern Template model Initially we obtain a set of segments S in the input image with a generic method such as [2], tuned to produce over-segmentation of the ground truth objects. The image parsing task is to assign labels L = {l i C} N i=1 of known classes C = {c j } K j=1 to given segments S = {s i dom I} N i=1 in an image I. Let X = {x i I} N i=1 be the image data of segments S. With segments corresponding to nodes in a graph and labels L being the node variables, we construct
4 4 Radim Tyleček and Radim Šára a CRF with potentials taking the general form of p(l X, S) = 1 e j φ(q) θjϕj(lq xq,sq), (1) Z(X, S) q Q where Q is the set of cliques, ϕ j are potential functions from a predefined set φ(q) defined for a clique q. The ϕ j is a function of all node variables in collections l q, x q, s q, their weights are θ j and Z(X, S) is the normalizing partition function. The design of a specific CRF model now lies in the choice of cliques Q defining topology on top of the segments and their potential functions ϕ j, which act on all node variables in the clique and set up the probabilistic model. 3.1 Spatial templates for data-dependent topology As a generalization of the adjacency, used i.e. in [19], we can think of other choices for the graph topology that may suit our domain by including interactions between distant image elements, which are close to each other in a different sense. As mentioned in Sec. 2, the scale of the problem does not allow us to reach complete connectivity. To allow dense connectivity while keeping the problem tractable, we need to restrict the number of cliques (edges). We describe this restriction with a template and, with the geometrical context in mind, we limit ourselves to spatial templates, which assign segments to cliques based on their geometrical attributes (shape, location). In principle other attributes (appearance) could be used in the template too. The meaning of this representation is to provide a systematic procedure for automatic learning of which interactions are the most efficient ones for the recognition task at hand. In order to describe the process of designing a complex data dependent topology for a CRF, we first have to decompose the process behind clique template design into individual steps: 1. The first step is the specification of core attribute relation functions δ i : A n R based on the domain knowledge. The relations act on easily measurable attributes A of n-tuples of segments. Example: Positions of two points in a plane as attributes A x, A y R 2 and their signed distances in directions x and y as the relations δ x, δ y. 2. The ranges of relations δ i are discretized to ordered sets i and d i : A n i becomes the discrete counterpart of function δ i. Example: The signed distance is divided into three intervals, x = {left, equal, right}, y = {below, equal, above}. 3. In the next step the Cartesian product of m relation ranges i gives domain D = 1 m, where subsets define logical meta relations (and, or, equal). Example: Three intervals on two axes give 3 2 combinations in D xy = x y. 4. The spatial template is a subset Ω D representing a concrete relation. The template is specified by an indicator function ω : D {0, 1} representing the allowed combinations. Example: For alignment in one direction we set ω xy = 1 when d x = equal or d y = equal, otherwise ω xy = 0.
5 Spatial Pattern Templates for Recognition of Objects with Regular Structure 5 The template design may be viewed as a kind of declarative programming framework for model design, a representation that can incorporate the specific knowledge in a generic way with combinations of core relations δ i. Each spatial template is related to one potential function ϕ j in (1). In summary, the result of this process describes which subsets of segments S labeled L should be jointly modeled in a graphical model; which of these are effective is subject to learning. Figure 2 shows how the segments correspond to nodes and their subsets define factors in p(l X, S). In this work we introduce two templates suitable for regular segmentations. Aligned Pairs (AP) Out of all pairs of segments u, v we choose those which are aligned either vertically or horizontally. It is useful to connect segments not directly adjacent when the labels in such pairs follow some pattern, i.e. windows are aligned with some free space in between. The specification follows the spatial template design steps: 1) Based on the position attribute we choose horizontal and vertical alignment δ h, δ v with δ h : (s u, s v ) R and δ h = 0 when the segments are exactly aligned, otherwise according to Fig. 1 (analogically δ v for vertical). 2) Quantized d h, d v take values from a according to Fig. 3 evaluated on segment bounding boxes. 3) Combinations of horizontal and vertical alignment are then represented by joining d h, d v in a discrete domain D AP = 2 a limited by maximum distance. 4) Finally we specify the AP template with ω AP = 1 in the blue region in Fig. 1. Note that adjacency (4-neighborhood) is a special case of AP when we specify ω AP = 1 only for four specific values in D AP (directly above/under/left/right, red squares in Fig. 1). Similarly values of d h 5 together with d v 5 correspond to overlap or nesting of segments. Regular Triplets (RT) Here we combine two Aligned Pairs in a triplet u, v, w with regular spacing, in which the v is the shared segment. Including triplets allows to express a basis for repetitive structures (rows, columns) of primitive objects of the same label (window, balcony). 1) In addition to position alignment δ h, δ v we introduce ternary relation functions for size similarity δ s : (s u, s v, s w ) R (relative difference in size of segments) and regular spacing δ r : (s u, s v, s w ) R (relative difference in free space between segments). 2) Based on them we define binary function d s : (s u, s v, s w ) {0, 1} to be 1 when δ s < 0.1 and similarly d r : (s u, s v, s w ) {0, 1} to be 1 when δ r < ) All functions d h (s u, s v ), d v (s u, s v ), d h (s v, s w ), d v (s v, s w ), d s (s u, s v, s w ) and d r (s u, s v, s w ) are then joined in a six-dimensional domain D RT = 4 a {0, 1} 2. 4) Finally we specify ω RT = 1 in the subspace of D RT where d s = 1, d r = 1 and values of d h, d v indicate that the three segments are pair-wise aligned in the same direction (horizontal or vertical). 3.2 Probabilistic model for label patterns Given the fixed set of segments S, we will now make use of the SPT topology to model regular contextual information with a CRF for the graphical model.
6 6 Radim Tyleček and Radim Šára 0 Fig. 1. Spatial template Ω is a subspace in the domain D AP given by relation functions δ h, δ v. The center corresponds to the exact alignment in both axes. If segment u (green) is located in the center, other squares (red for adjacency, blue belong to Aligned Pairs) correspond to discrete relative positions of segment v. Fig. 2. Factor graph for regular SPT. Segments S are shown as blue rectangles s i (i.e. corresponding to window frames), factors are solid squares. Aligned Pairs connect only segments in mutual relative position specified by the template in Fig. 1. Regular Triplets then combine two aligned and equally spaced pairs together. For clarity we rewrite (1) in a convenient form p(l X, S) e ϕ1(νu) e ϕ2(νu,νv) u S (uv) AP (uvw) RT e ϕ3(νu,νv,νw), (2) where ν i = (l i s i, x i ) are variables related to node i and ϕ 1, ϕ 2, ϕ 3 are unary, pair-wise (AP) and ternary (RT ) potential functions (factors) respectively. We will now discuss features used in these factors. The unary potentials ϕ 1 (ν i ) = log p(l i s i, x i ) are outputs of a multi-class classifier evaluated on the features for an image patch x i of the segment s i. The feature vector f(x i ) is extracted from the image data by appending histogram of gradients (HoG), color (HSV), relative size, position, aspect ratio and 2D auto-correlation function. Pairwise potentials for AP are restrictions on the template learned for concrete label pairs. They are based on a discretized version of the relative location distribution [4], similar form is used in [15] for adjacency. It is the statistical function ϕ 2 (ν u, ν v ) = θ 2,dh,d v log p(l u, l v d h, d v ), (3) where d h are the values of horizontal alignment d h (s u1, s v1 ) specified in Fig. 3, analogically d v for vertical. The pattern of labels l u, l v is the empirical distribution in the given relative locations d h, d v computed as the second order co-occurrence statistics of the labels for pairs of segments observed in a training set. The co-occurrence frequencies are obtained from a training set for each pair of class labels and are accumulated for all values in the spatial template domain Ω AP. Figure 4 shows the resulting histograms of AP in Fig. 1.
7 Spatial Pattern Templates for Recognition of Objects with Regular Structure 7 balcony chimney door wall roof shop sky window 0 balcony window shop roof wall door chimney sky Fig. 3. Given interval (a, b) the figure shows the values a of alignment relation function d a for a set of intervals (u, v), ranging from 0 (aligned) to ±7 (no overlap). More free space between intervals corresponds to higher absolute values (8, 9, 10,... ) in. Positions are considered equal within 10% tolerance of the interval length. Fig. 4. Discrete relative co-occurrence location histogram p(l u, l v, d h, d v) for label pairs in the ECP-Monge dataset. It holds information such as sky is usually above windows or balconies are aligned vertically with windows. Dark colors correspond to high frequency, blue cross marks d = 0 (equality). Ternary potentials models regularity by encouraging some labels in RT to have the same value (i.e. window) in { θ 3,c if l u = l v = l w = c, ϕ 3 (ν u, ν v, ν w ) = (4) θ 3,0 otherwise, which is a generalized Potts model [5] and θ 3,c is a learned class-specific parameter. We do not use the complex ternary co-occurrence statistic with this potential because there is not enough data for its training. To facilitate efficient learning, we convert ternary potentials into pairwise by adding a hidden variable for each ternary factor ϕ 3. Piece-wise parameter learning. The unary potential classifiers are trained independently to reduce the number of free parameters in the joint CRF learning process. For binary potentials (including the reduced ternary potentials) we use pseudo-likelihood learning procedure to obtain values of the potential weights θ. This process corresponds to structure learning within the domain Ω AP limited by the SPT topology, resulting in θ 2 0 where the relation does not contribute to the discriminative power of the CRF. In practice this amounts to learning 200 parameters based on likelihood in 50 sampled images, each of them with approximately 500 label variables, 3000 pair and 100 triplet factors. The training process takes several hours to complete (8 cores, 2 GHz) using Mark Schmidt s UGM library ( Inference. Because some of our potentials have a general form, exact inference is not possible and we use an approximate algorithm [6] to compute the marginal distributions of the labels, with run time around 30 s per image.
8 8 Radim Tyleček and Radim Šára Method SPT (proposed) Three Layers [10] SG [14] HCRF [19] Classifier SGT SVM RNN RF RDF Spatial pattern NC AP APRT NC Adjacency BSG HAdj Prob. model - Cooc Cooc - Potts SG CS-Potts ECP-Monge (8) etrims (8) CMP Facade (12) Table 1. Pixel-wise accuracy comparison on facade datasets (number of classes in brackets). Abbreviations: SGT =Segments with Ground Truth labels, NC =No Context, AP=Aligned Pairs, RT =Regular Triplets, Cooc=Coocurence, BSG=Binary Split Grammar, HAdj =Hieararchical Adjacency, RNN =Recursive Neural Network, RF =Randomized Forest, SG=Shape Grammar, HCRF =Hierarchical CRF. 4 Experimental results We have validated our method on two public datasets annotated into 8 classes (like wall, window, balcony etc.). In addition in this paper we introduce a new large facade dataset. The public ECP-Monge dataset is available from [14] (we use corrected ground truth labellings from [10]). It contains 104 rectified facade images from Paris, all in uniform Hausmannian style. Next, the public etrims database [7] contains 60 images of buildings and facades in various architectural styles (neoclassical, modern and other). We rectified them using vanishing points. We have compiled a new publicly available larger CMP Facade database [16] with 400 images of greater diversity of styles and 12 object classes. Figure 5 shows parsing results for different contextual models, additional results can be found in the report [16]. Table 1 provides their pixel-wise accuracy and comparison with other methods based on 5-fold cross validation. We have used method [2] to extract averagely 500 segments (independently on the image resolution) and show it under SGT, where ground truth labels of pixels within each segment have been collected and the most frequent label among them selected for the entire segment. The result is the maximum achievable accuracy with this segmentation, inaccurate localization of the segment borders is currently the main limiting factor (we are 4.3% below the limit on ECP-Monge). The main observation is that contextual information improves the accuracy averagely by 20% when statistics on AP is used, and by further 4% when RT are included. The RT help mostly with window and balcony identification, thanks to the statistics of these labels following regular pattern in the dataset. The qualitative improvement is noticeable, even when their effect on the total pixelwise accuracy is small, which is a sign it is not a very suitable measure. A more sophisticated local classifier could make the structural part of the model almost unnecessary, as observed in [10], but such model may be overly reliant on a good training set and perhaps prone to overfitting.



















































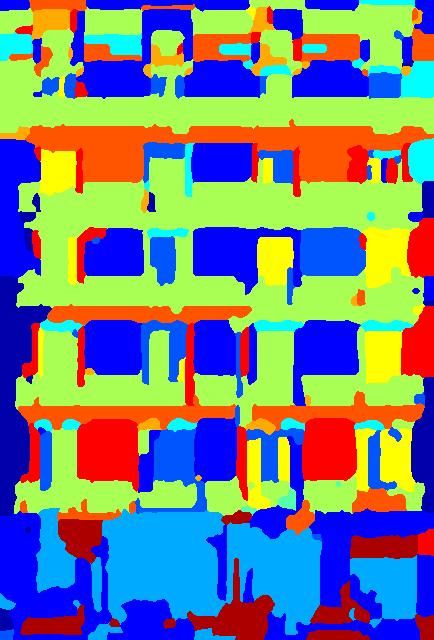




























































































9 Spatial Pattern Templates for Recognition of Objects with Regular Structure ECP-Monge image GT image GT NC AP APRT SGT 9 CMP Facade DB image GT NC AP APRT SGT etrims DB NC AP APRT SGT Fig. 5. Selected visual results on facade dataset, our result with full model is under APRT, (note it cannot be better than SGT ). See legend in Tab. 1 for abbreviations.
10 10 Radim Tyleček and Radim Šára 5 Conclusion We have introduced the concept of Spatial Pattern Templates for contextual models. The proposed Aligned Pairs and Regular Triplets templates have been found useful for segmentation of regular scenes by increasing accuracy of facade image parsing. Our next interest is to improve the quality of the segment extraction to increase accuracy of their borders. Acknowledgement: This work was supported by the Czech Science Foundation under Project P103/12/1578. References 1. Čech, J., Šára, R.: Languages for constrained binary segmentation based on maximum a posteriori probability labeling. IJIST 19(2), (2009) 2. Felzenszwalb, P.F., Huttenlocher, D.P.: Efficient graph-based image segmentation. IJCV 59(2), (2004) 3. Galleguillos, C., Rabinovich, A., Belongie, S.: Object categorization using cooccurrence, location and appearance. In: Proc. CVPR (2008) 4. Gould, S., Rodgers, J., Cohen, D., Elidan, G., Koller, D.: Multi-class segmentation with relative location prior. IJCV 80(3), (2008) 5. Kohli, P., Ladicky, L., Torr, P.: Robust higher order potentials for enforcing label consistency. IJCV 82(3), (2009) 6. Kolmogorov, V.: Convergent tree-reweighted message passing for energy minimization. Trans. PAMI 28(10), (2006) 7. Korč, F., Förstner, W.: etrims image database for interpreting images of manmade scenes. Tech. Rep. TR-IGG-P (2009) 8. Ladicky, L., Russell, C., Kohli, P., Torr, P.: Associative hierarchical CRFs for object class image segmentation. In: Proc. ICCV. pp (2009) 9. Lafferty, J., McCallum, A., Pereira, F.: Conditional random fields: Probabilistic models for segmenting and labeling sequence data. In: Proc. ICML (2001) 10. Martinovic, A., Mathias, M., Weissenberg, J., Gool, L.J.V.: A three-layered approach to facade parsing. In: Proc. ECCV. pp (2012) 11. Nowozin, S., Gehler, P., Lampert, C.: On parameter learning in CRF-based approaches to object class image segmentation. In: Proc. ECCV. pp (2010) 12. Schmidt, M., Murphy, K., Fung, G., Rosales, R.: Structure learning in random fields for heart motion abnormality detection. In: Proc. CVPR (2008) 13. Schmidt, M., Murphy, K.: Convex structure learning in log-linear models: Beyond pairwise potentials. In: Proc. AISTATS (2010) 14. Simon, L., Teboul, O., Koutsourakis, P., Paragios, N.: Random exploration of the procedural space for single-view 3D modeling of buildings. IJCV 93(2) (2011) 15. Tighe, J., Lazebnik, S.: Understanding scenes on many levels. In: Proc. ICCV. pp (2011) 16. Tyleček, R.: The CMP facade database. Research Report CTU CMP , Czech Technical University (2012), Tyleček, R., Šára, R.: Modeling symmetries for stochastic structural recognition. In: Proc. ICCV Workshops. pp (2011) 18. Tyleček, R., Šára, R.: Stochastic recognition of regular structures in facade images. IPSJ Trans. Computer Vision and Applications 4, (2012) 19. Yang, M., Förstner, W.: A hierarchical conditional random field model for labeling and classifying images of man-made scenes. In: Proc. ICCV Workshops (2011)
FACADE SEGMENTATION WITH A STRUCTURED RANDOM FOREST
 FACADE SEGMENTATION WITH A STRUCTURED RANDOM FOREST Kujtim Rahmani, Hai Huang, Helmut Mayer Bundeswehr University Munich, Institute for Applied Computer Science, Visual Computing, Neubiberg, Germany {kujtim.rahmani,
FACADE SEGMENTATION WITH A STRUCTURED RANDOM FOREST Kujtim Rahmani, Hai Huang, Helmut Mayer Bundeswehr University Munich, Institute for Applied Computer Science, Visual Computing, Neubiberg, Germany {kujtim.rahmani,
Efficient Facade Segmentation using Auto-Context
 Efficient Facade Segmentation using Auto-Context Varun Jampani MPI for Intelligent Systems Tübingen, Germany varun.jampani@tuebingen.mpg.de Raghudeep Gadde Université Paris-Est, LIGM ENPC, ECP, Paris,
Efficient Facade Segmentation using Auto-Context Varun Jampani MPI for Intelligent Systems Tübingen, Germany varun.jampani@tuebingen.mpg.de Raghudeep Gadde Université Paris-Est, LIGM ENPC, ECP, Paris,
HIERARCHICAL CONDITIONAL RANDOM FIELD FOR MULTI-CLASS IMAGE CLASSIFICATION
 HIERARCHICAL CONDITIONAL RANDOM FIELD FOR MULTI-CLASS IMAGE CLASSIFICATION Michael Ying Yang, Wolfgang Förstner Department of Photogrammetry, Bonn University, Bonn, Germany michaelyangying@uni-bonn.de,
HIERARCHICAL CONDITIONAL RANDOM FIELD FOR MULTI-CLASS IMAGE CLASSIFICATION Michael Ying Yang, Wolfgang Förstner Department of Photogrammetry, Bonn University, Bonn, Germany michaelyangying@uni-bonn.de,
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
CRFs for Image Classification
 CRFs for Image Classification Devi Parikh and Dhruv Batra Carnegie Mellon University Pittsburgh, PA 15213 {dparikh,dbatra}@ece.cmu.edu Abstract We use Conditional Random Fields (CRFs) to classify regions
CRFs for Image Classification Devi Parikh and Dhruv Batra Carnegie Mellon University Pittsburgh, PA 15213 {dparikh,dbatra}@ece.cmu.edu Abstract We use Conditional Random Fields (CRFs) to classify regions
EFFICIENT SEMANTIC SEGMENTATION OF MAN-MADE SCENES USING FULLY-CONNECTED CONDITIONAL RANDOM FIELD
 EFFICIENT SEMANTIC SEGMENTATION OF MAN-MADE SCENES USING FULLY-CONNECTED CONDITIONAL RANDOM FIELD Weihao Li a, Michael Ying Yang a,b a TU Dresden, Computer Vision Lab Dresden, Dresden, Germany - weihao.li@mailbox.tu-dresden.de
EFFICIENT SEMANTIC SEGMENTATION OF MAN-MADE SCENES USING FULLY-CONNECTED CONDITIONAL RANDOM FIELD Weihao Li a, Michael Ying Yang a,b a TU Dresden, Computer Vision Lab Dresden, Dresden, Germany - weihao.li@mailbox.tu-dresden.de
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Contextual Classification with Functional Max-Margin Markov Networks
 Contextual Classification with Functional Max-Margin Markov Networks Dan Munoz Nicolas Vandapel Drew Bagnell Martial Hebert Geometry Estimation (Hoiem et al.) Sky Problem 3-D Point Cloud Classification
Contextual Classification with Functional Max-Margin Markov Networks Dan Munoz Nicolas Vandapel Drew Bagnell Martial Hebert Geometry Estimation (Hoiem et al.) Sky Problem 3-D Point Cloud Classification
Decomposing a Scene into Geometric and Semantically Consistent Regions
 Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
Supplementary Material: Decision Tree Fields
 Supplementary Material: Decision Tree Fields Note, the supplementary material is not needed to understand the main paper. Sebastian Nowozin Sebastian.Nowozin@microsoft.com Toby Sharp toby.sharp@microsoft.com
Supplementary Material: Decision Tree Fields Note, the supplementary material is not needed to understand the main paper. Sebastian Nowozin Sebastian.Nowozin@microsoft.com Toby Sharp toby.sharp@microsoft.com
A MRF Shape Prior for Facade Parsing with Occlusions Supplementary Material
 A MRF Shape Prior for Facade Parsing with Occlusions Supplementary Material Mateusz Koziński, Raghudeep Gadde, Sergey Zagoruyko, Guillaume Obozinski and Renaud Marlet Université Paris-Est, LIGM (UMR CNRS
A MRF Shape Prior for Facade Parsing with Occlusions Supplementary Material Mateusz Koziński, Raghudeep Gadde, Sergey Zagoruyko, Guillaume Obozinski and Renaud Marlet Université Paris-Est, LIGM (UMR CNRS
Region-based Segmentation and Object Detection
 Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Exploiting Sparsity for Real Time Video Labelling
 2013 IEEE International Conference on Computer Vision Workshops Exploiting Sparsity for Real Time Video Labelling Lachlan Horne, Jose M. Alvarez, and Nick Barnes College of Engineering and Computer Science,
2013 IEEE International Conference on Computer Vision Workshops Exploiting Sparsity for Real Time Video Labelling Lachlan Horne, Jose M. Alvarez, and Nick Barnes College of Engineering and Computer Science,
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
HIGH QUALITY FACADE SEGMENTATION BASED ON STRUCTURED RANDOM FOREST, REGION PROPOSAL NETWORK AND RECTANGULAR FITTING
 ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume IV-2, 2018 HIGH QUALITY FACADE SEGMENTATION BASED ON STRUCTURED RANDOM FOREST, REGION PROPOSAL NETWORK AND RECTANGULAR
ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume IV-2, 2018 HIGH QUALITY FACADE SEGMENTATION BASED ON STRUCTURED RANDOM FOREST, REGION PROPOSAL NETWORK AND RECTANGULAR
DETECTION OF REPEATED STRUCTURES IN FACADE IMAGES
 DETECTION OF REPEATED STRUCTURES IN FACADE IMAGES S. Wenzel, M. Drauschke, W. Förstner Department of Photogrammetry, Institute of Geodesy and Geoinformation, University of Bonn, Nussallee 15, 53115 Bonn,
DETECTION OF REPEATED STRUCTURES IN FACADE IMAGES S. Wenzel, M. Drauschke, W. Förstner Department of Photogrammetry, Institute of Geodesy and Geoinformation, University of Bonn, Nussallee 15, 53115 Bonn,
Approximate Parameter Learning in Conditional Random Fields: An Empirical Investigation
 Approximate Parameter Learning in Conditional Random Fields: An Empirical Investigation Filip Korč and Wolfgang Förstner University of Bonn, Department of Photogrammetry, Nussallee 15, 53115 Bonn, Germany
Approximate Parameter Learning in Conditional Random Fields: An Empirical Investigation Filip Korč and Wolfgang Förstner University of Bonn, Department of Photogrammetry, Nussallee 15, 53115 Bonn, Germany
Simultaneous Multi-class Pixel Labeling over Coherent Image Sets
 Simultaneous Multi-class Pixel Labeling over Coherent Image Sets Paul Rivera Research School of Computer Science Australian National University Canberra, ACT 0200 Stephen Gould Research School of Computer
Simultaneous Multi-class Pixel Labeling over Coherent Image Sets Paul Rivera Research School of Computer Science Australian National University Canberra, ACT 0200 Stephen Gould Research School of Computer
IN this paper, we consider the problem of segmenting building
 Efficient 2D and 3D Facade Segmentation using Auto-Context Raghudeep Gadde*, Varun Jampani*, Renaud Marlet, and Peter V. Gehler 1 arxiv:1606.06437v1 [cs.cv] 21 Jun 2016 Abstract This paper introduces a
Efficient 2D and 3D Facade Segmentation using Auto-Context Raghudeep Gadde*, Varun Jampani*, Renaud Marlet, and Peter V. Gehler 1 arxiv:1606.06437v1 [cs.cv] 21 Jun 2016 Abstract This paper introduces a
Undirected Graphical Models. Raul Queiroz Feitosa
 Undirected Graphical Models Raul Queiroz Feitosa Pros and Cons Advantages of UGMs over DGMs UGMs are more natural for some domains (e.g. context-dependent entities) Discriminative UGMs (CRF) are better
Undirected Graphical Models Raul Queiroz Feitosa Pros and Cons Advantages of UGMs over DGMs UGMs are more natural for some domains (e.g. context-dependent entities) Discriminative UGMs (CRF) are better
Multi-Class Image Labeling with Top-Down Segmentation and Generalized Robust P N Potentials
 FLOROS ET AL.: MULTI-CLASS IMAGE LABELING WITH TOP-DOWN SEGMENTATIONS 1 Multi-Class Image Labeling with Top-Down Segmentation and Generalized Robust P N Potentials Georgios Floros 1 floros@umic.rwth-aachen.de
FLOROS ET AL.: MULTI-CLASS IMAGE LABELING WITH TOP-DOWN SEGMENTATIONS 1 Multi-Class Image Labeling with Top-Down Segmentation and Generalized Robust P N Potentials Georgios Floros 1 floros@umic.rwth-aachen.de
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
ECG782: Multidimensional Digital Signal Processing
 ECG782: Multidimensional Digital Signal Processing Object Recognition http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Knowledge Representation Statistical Pattern Recognition Neural Networks Boosting
ECG782: Multidimensional Digital Signal Processing Object Recognition http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Knowledge Representation Statistical Pattern Recognition Neural Networks Boosting
etrims Scene Interpretation Datasets
 Universität Hamburg Technical Report FBI-HH-M-345/10 etrims Scene Interpretation Datasets Johannes Hartz Patrick Koopmann Arne Kreutzmann Kasim Terzić {hartz koopmann terzic}@ informatik.uni-hamburg.de
Universität Hamburg Technical Report FBI-HH-M-345/10 etrims Scene Interpretation Datasets Johannes Hartz Patrick Koopmann Arne Kreutzmann Kasim Terzić {hartz koopmann terzic}@ informatik.uni-hamburg.de
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Learning a Dictionary of Shape Epitomes with Applications to Image Labeling
 Learning a Dictionary of Shape Epitomes with Applications to Image Labeling Liang-Chieh Chen 1, George Papandreou 2, and Alan L. Yuille 1,2 Departments of Computer Science 1 and Statistics 2, UCLA lcchen@cs.ucla.edu,
Learning a Dictionary of Shape Epitomes with Applications to Image Labeling Liang-Chieh Chen 1, George Papandreou 2, and Alan L. Yuille 1,2 Departments of Computer Science 1 and Statistics 2, UCLA lcchen@cs.ucla.edu,
Efficient Structured Parsing of Façades Using Dynamic Programming
 Efficient Structured Parsing of Façades Using Dynamic Programming Andrea Cohen 1, Alexander G. Schwing 2, Marc Pollefeys 1 1 ETH Zürich, Switzerland {acohen,pomarc}@inf.ethz.ch 2 University of Toronto,
Efficient Structured Parsing of Façades Using Dynamic Programming Andrea Cohen 1, Alexander G. Schwing 2, Marc Pollefeys 1 1 ETH Zürich, Switzerland {acohen,pomarc}@inf.ethz.ch 2 University of Toronto,
Learning and Recognizing Visual Object Categories Without First Detecting Features
 Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Combining Appearance and Structure from Motion Features for Road Scene Understanding
 STURGESS et al.: COMBINING APPEARANCE AND SFM FEATURES 1 Combining Appearance and Structure from Motion Features for Road Scene Understanding Paul Sturgess paul.sturgess@brookes.ac.uk Karteek Alahari karteek.alahari@brookes.ac.uk
STURGESS et al.: COMBINING APPEARANCE AND SFM FEATURES 1 Combining Appearance and Structure from Motion Features for Road Scene Understanding Paul Sturgess paul.sturgess@brookes.ac.uk Karteek Alahari karteek.alahari@brookes.ac.uk
Object Recognition Using Pictorial Structures. Daniel Huttenlocher Computer Science Department. In This Talk. Object recognition in computer vision
 Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Automatic Dense Semantic Mapping From Visual Street-level Imagery
 Automatic Dense Semantic Mapping From Visual Street-level Imagery Sunando Sengupta [1], Paul Sturgess [1], Lubor Ladicky [2], Phillip H.S. Torr [1] [1] Oxford Brookes University [2] Visual Geometry Group,
Automatic Dense Semantic Mapping From Visual Street-level Imagery Sunando Sengupta [1], Paul Sturgess [1], Lubor Ladicky [2], Phillip H.S. Torr [1] [1] Oxford Brookes University [2] Visual Geometry Group,
Local cues and global constraints in image understanding
 Local cues and global constraints in image understanding Olga Barinova Lomonosov Moscow State University *Many slides adopted from the courses of Anton Konushin Image understanding «To see means to know
Local cues and global constraints in image understanding Olga Barinova Lomonosov Moscow State University *Many slides adopted from the courses of Anton Konushin Image understanding «To see means to know
Urban Scene Segmentation, Recognition and Remodeling. Part III. Jinglu Wang 11/24/2016 ACCV 2016 TUTORIAL
 Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Translation Symmetry Detection: A Repetitive Pattern Analysis Approach
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
arxiv: v1 [cs.cv] 20 Oct 2012
![arxiv: v1 [cs.cv] 20 Oct 2012](/thumbs/75/71957326.jpg "arxiv: v1 [cs.cv] 20 Oct 2012") Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials arxiv:1210.5644v1 [cs.cv] 20 Oct 2012 Philipp Krähenbühl Computer Science Department Stanford University philkr@cs.stanford.edu
Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials arxiv:1210.5644v1 [cs.cv] 20 Oct 2012 Philipp Krähenbühl Computer Science Department Stanford University philkr@cs.stanford.edu
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
A Weak Structure Model for Regular Pattern Recognition Applied to Facade Images
 A Weak Structure Model for Regular Pattern Recognition Applied to Facade Images Radim Tyleček and Radim Šára Center for Machine Perception Faculty of Electrical Engineering, Czech Technical University,
A Weak Structure Model for Regular Pattern Recognition Applied to Facade Images Radim Tyleček and Radim Šára Center for Machine Perception Faculty of Electrical Engineering, Czech Technical University,
Big and Tall: Large Margin Learning with High Order Losses
 Big and Tall: Large Margin Learning with High Order Losses Daniel Tarlow University of Toronto dtarlow@cs.toronto.edu Richard Zemel University of Toronto zemel@cs.toronto.edu Abstract Graphical models
Big and Tall: Large Margin Learning with High Order Losses Daniel Tarlow University of Toronto dtarlow@cs.toronto.edu Richard Zemel University of Toronto zemel@cs.toronto.edu Abstract Graphical models
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Semantic Segmentation of Street-Side Images
 Semantic Segmentation of Street-Side Images Michal Recky 1, Franz Leberl 2 1 Institute for Computer Graphics and Vision Graz University of Technology recky@icg.tugraz.at 2 Institute for Computer Graphics
Semantic Segmentation of Street-Side Images Michal Recky 1, Franz Leberl 2 1 Institute for Computer Graphics and Vision Graz University of Technology recky@icg.tugraz.at 2 Institute for Computer Graphics
Segmentation with non-linear constraints on appearance, complexity, and geometry
 IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
Spatial Latent Dirichlet Allocation
 Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University
 Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University NIPS 2008: E. Sudderth & M. Jordan, Shared Segmentation of Natural
Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University NIPS 2008: E. Sudderth & M. Jordan, Shared Segmentation of Natural
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Optimizing Monocular Cues for Depth Estimation from Indoor Images
 Optimizing Monocular Cues for Depth Estimation from Indoor Images Aditya Venkatraman 1, Sheetal Mahadik 2 1, 2 Department of Electronics and Telecommunication, ST Francis Institute of Technology, Mumbai,
Optimizing Monocular Cues for Depth Estimation from Indoor Images Aditya Venkatraman 1, Sheetal Mahadik 2 1, 2 Department of Electronics and Telecommunication, ST Francis Institute of Technology, Mumbai,
Using Global Bag of Features Models in Random Fields for Joint Categorization and Segmentation of Objects
 Using Global Bag of Features Models in Random Fields for Joint Categorization and Segmentation of Objects Dheeraj Singaraju René Vidal Center for Imaging Science, Johns Hopkins University, Baltimore MD
Using Global Bag of Features Models in Random Fields for Joint Categorization and Segmentation of Objects Dheeraj Singaraju René Vidal Center for Imaging Science, Johns Hopkins University, Baltimore MD
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
A Hierarchical Conditional Random Field Model for Labeling and Segmenting Images of Street Scenes
 A Hierarchical Conditional Random Field Model for Labeling and Segmenting Images of Street Scenes Qixing Huang Stanford University huangqx@stanford.edu Mei Han Google Inc. meihan@google.com Bo Wu Google
A Hierarchical Conditional Random Field Model for Labeling and Segmenting Images of Street Scenes Qixing Huang Stanford University huangqx@stanford.edu Mei Han Google Inc. meihan@google.com Bo Wu Google
IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS
 IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS M. J. Shafiee, A. G. Chung, A. Wong, and P. Fieguth Vision & Image Processing Lab, Systems
IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS M. J. Shafiee, A. G. Chung, A. Wong, and P. Fieguth Vision & Image Processing Lab, Systems
Hough Regions for Joining Instance Localization and Segmentation
 Hough Regions for Joining Instance Localization and Segmentation Hayko Riemenschneider 1,2, Sabine Sternig 1, Michael Donoser 1, Peter M. Roth 1, and Horst Bischof 1 1 Institute for Computer Graphics and
Hough Regions for Joining Instance Localization and Segmentation Hayko Riemenschneider 1,2, Sabine Sternig 1, Michael Donoser 1, Peter M. Roth 1, and Horst Bischof 1 1 Institute for Computer Graphics and
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Spatially Constrained Location Prior for Scene Parsing
 Spatially Constrained Location Prior for Scene Parsing Ligang Zhang, Brijesh Verma, David Stockwell, Sujan Chowdhury Centre for Intelligent Systems School of Engineering and Technology, Central Queensland
Spatially Constrained Location Prior for Scene Parsing Ligang Zhang, Brijesh Verma, David Stockwell, Sujan Chowdhury Centre for Intelligent Systems School of Engineering and Technology, Central Queensland
LSTM and its variants for visual recognition. Xiaodan Liang Sun Yat-sen University
 LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
Grammar Rule Extraction and Transfer in Buildings
 Grammar Rule Extraction and Transfer in Buildings Asad Khalid Ismail Lahore University of Management Sciences Sector U, DHA, Lahore 13100004@lums.edu.pk Zuha Agha Lahore University of Management Sciences
Grammar Rule Extraction and Transfer in Buildings Asad Khalid Ismail Lahore University of Management Sciences Sector U, DHA, Lahore 13100004@lums.edu.pk Zuha Agha Lahore University of Management Sciences
Located Hidden Random Fields: Learning Discriminative Parts for Object Detection
 Located Hidden Random Fields: Learning Discriminative Parts for Object Detection Ashish Kapoor 1 and John Winn 2 1 MIT Media Laboratory, Cambridge, MA 02139, USA kapoor@media.mit.edu 2 Microsoft Research,
Located Hidden Random Fields: Learning Discriminative Parts for Object Detection Ashish Kapoor 1 and John Winn 2 1 MIT Media Laboratory, Cambridge, MA 02139, USA kapoor@media.mit.edu 2 Microsoft Research,
Detecting Multiple Symmetries with Extended SIFT
 1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
Part 5: Structured Support Vector Machines
 Part 5: Structured Support Vector Machines Sebastian Nowozin and Christoph H. Lampert Providence, 21st June 2012 1 / 34 Problem (Loss-Minimizing Parameter Learning) Let d(x, y) be the (unknown) true data
Part 5: Structured Support Vector Machines Sebastian Nowozin and Christoph H. Lampert Providence, 21st June 2012 1 / 34 Problem (Loss-Minimizing Parameter Learning) Let d(x, y) be the (unknown) true data
Detection of Man-made Structures in Natural Images
 Detection of Man-made Structures in Natural Images Tim Rees December 17, 2004 Abstract Object detection in images is a very active research topic in many disciplines. Probabilistic methods have been applied
Detection of Man-made Structures in Natural Images Tim Rees December 17, 2004 Abstract Object detection in images is a very active research topic in many disciplines. Probabilistic methods have been applied
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Self Lane Assignment Using Smart Mobile Camera For Intelligent GPS Navigation and Traffic Interpretation
 For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
Multi-Class Segmentation with Relative Location Prior
 Multi-Class Segmentation with Relative Location Prior Stephen Gould, Jim Rodgers, David Cohen, Gal Elidan, Daphne Koller Department of Computer Science, Stanford University International Journal of Computer
Multi-Class Segmentation with Relative Location Prior Stephen Gould, Jim Rodgers, David Cohen, Gal Elidan, Daphne Koller Department of Computer Science, Stanford University International Journal of Computer
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Image-Based Buildings and Facades
 Image-Based Buildings and Facades Peter Wonka Associate Professor of Computer Science Arizona State University Daniel G. Aliaga Associate Professor of Computer Science Purdue University Challenge Generate
Image-Based Buildings and Facades Peter Wonka Associate Professor of Computer Science Arizona State University Daniel G. Aliaga Associate Professor of Computer Science Purdue University Challenge Generate
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Structured Completion Predictors Applied to Image Segmentation
 Structured Completion Predictors Applied to Image Segmentation Dmitriy Brezhnev, Raphael-Joel Lim, Anirudh Venkatesh December 16, 2011 Abstract Multi-image segmentation makes use of global and local features
Structured Completion Predictors Applied to Image Segmentation Dmitriy Brezhnev, Raphael-Joel Lim, Anirudh Venkatesh December 16, 2011 Abstract Multi-image segmentation makes use of global and local features
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE. Nan Hu. Stanford University Electrical Engineering
 STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE Nan Hu Stanford University Electrical Engineering nanhu@stanford.edu ABSTRACT Learning 3-D scene structure from a single still
STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE Nan Hu Stanford University Electrical Engineering nanhu@stanford.edu ABSTRACT Learning 3-D scene structure from a single still
Robust PDF Table Locator
 Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Fast Edge Detection Using Structured Forests
 Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Supplementary Material: Adaptive and Move Making Auxiliary Cuts for Binary Pairwise Energies
 Supplementary Material: Adaptive and Move Making Auxiliary Cuts for Binary Pairwise Energies Lena Gorelick Yuri Boykov Olga Veksler Computer Science Department University of Western Ontario Abstract Below
Supplementary Material: Adaptive and Move Making Auxiliary Cuts for Binary Pairwise Energies Lena Gorelick Yuri Boykov Olga Veksler Computer Science Department University of Western Ontario Abstract Below
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
Markov Random Fields and Segmentation with Graph Cuts
 Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Sketchable Histograms of Oriented Gradients for Object Detection
 Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
Scene Grammars, Factor Graphs, and Belief Propagation
 Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
The More the Merrier: Parameter Learning for Graphical Models with Multiple MAPs
 The More the Merrier: Parameter Learning for Graphical Models with Multiple MAPs Franziska Meier fmeier@usc.edu U. of Southern California, 94 Bloom Walk, Los Angeles, CA 989 USA Amir Globerson amir.globerson@mail.huji.ac.il
The More the Merrier: Parameter Learning for Graphical Models with Multiple MAPs Franziska Meier fmeier@usc.edu U. of Southern California, 94 Bloom Walk, Los Angeles, CA 989 USA Amir Globerson amir.globerson@mail.huji.ac.il
Harmony Potentials for Joint Classification and Segmentation
 Harmony Potentials for Joint Classification and Segmentation Josep M. Gonfaus 1,2, Xavier Boix 1, Joost van de Weijer 1,2 Andrew D. Bagdanov 1 Joan Serrat 1,2 Jordi Gonzàlez 1,2 1 Centre de Visió per Computador
Harmony Potentials for Joint Classification and Segmentation Josep M. Gonfaus 1,2, Xavier Boix 1, Joost van de Weijer 1,2 Andrew D. Bagdanov 1 Joan Serrat 1,2 Jordi Gonzàlez 1,2 1 Centre de Visió per Computador
IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues
 2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
Object Class Segmentation using Random Forests
 Object Class Segmentation using Random Forests F. Schroff 1, A. Criminisi 2, A. Zisserman 1 1 Dept. of Engineering Science, University of Oxford {schroff,az}@robots.ox.ac.uk 2 Microsoft Research Ltd.,
Object Class Segmentation using Random Forests F. Schroff 1, A. Criminisi 2, A. Zisserman 1 1 Dept. of Engineering Science, University of Oxford {schroff,az}@robots.ox.ac.uk 2 Microsoft Research Ltd.,
SuperParsing: Scalable Nonparametric Image Parsing with Superpixels
 SuperParsing: Scalable Nonparametric Image Parsing with Superpixels Joseph Tighe and Svetlana Lazebnik Dept. of Computer Science, University of North Carolina at Chapel Hill Chapel Hill, NC 27599-3175
SuperParsing: Scalable Nonparametric Image Parsing with Superpixels Joseph Tighe and Svetlana Lazebnik Dept. of Computer Science, University of North Carolina at Chapel Hill Chapel Hill, NC 27599-3175
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features
 Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Scene Grammars, Factor Graphs, and Belief Propagation
 Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Learning CRFs using Graph Cuts
 Appears in European Conference on Computer Vision (ECCV) 2008 Learning CRFs using Graph Cuts Martin Szummer 1, Pushmeet Kohli 1, and Derek Hoiem 2 1 Microsoft Research, Cambridge CB3 0FB, United Kingdom
Appears in European Conference on Computer Vision (ECCV) 2008 Learning CRFs using Graph Cuts Martin Szummer 1, Pushmeet Kohli 1, and Derek Hoiem 2 1 Microsoft Research, Cambridge CB3 0FB, United Kingdom
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Sports Field Localization
 Sports Field Localization Namdar Homayounfar February 5, 2017 1 / 1 Motivation Sports Field Localization: Have to figure out where the field and players are in 3d space in order to make measurements and
Sports Field Localization Namdar Homayounfar February 5, 2017 1 / 1 Motivation Sports Field Localization: Have to figure out where the field and players are in 3d space in order to make measurements and
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement
 Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement Daegeon Kim Sung Chun Lee Institute for Robotics and Intelligent Systems University of Southern
Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement Daegeon Kim Sung Chun Lee Institute for Robotics and Intelligent Systems University of Southern
Lecture 16: Object recognition: Part-based generative models
 Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Joint Vanishing Point Extraction and Tracking. 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision ETH Zürich
 Joint Vanishing Point Extraction and Tracking 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision Lab @ ETH Zürich Definition: Vanishing Point = Intersection of 2D line segments,
Joint Vanishing Point Extraction and Tracking 9. June 2015 CVPR 2015 Till Kroeger, Dengxin Dai, Luc Van Gool, Computer Vision Lab @ ETH Zürich Definition: Vanishing Point = Intersection of 2D line segments,