Autonomous navigation in industrial cluttered environments using embedded stereo-vision
|
|
|
- Philomena Hunter
- 5 years ago
- Views:
Transcription

1 Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March
2 Copernic Lab (ONERA Palaiseau) Research topics Vision-based localization, state estimation and mapping Guidance and control (including multiple vehicles) Safety, fault diagnosis and reconfiguration Embedded algorithms for autonomous navigation Main application: Autonomous navigation of robots in indoor cluttered environments On-going projects ONERA / SNCF Research Partnership (DROSOFILES) FP7 EuRoC (European Robotics Challenges) 2











 Embedded")
3 ONERA / SNCF Research Partnership PRI DROSOFILES UAVs for SNCF (French Railways) Topics: indoor inspection, outdoor line or structure inspection From corrective maintenance to predictive maintenance Cost reduction Multi-disciplinary ONERA expertise System Analysis, conception and simulation validation (SimulationLab) Reglementation, safety and certification Aerial Robotics (autonomous navigation) Embedded sensors (IR, camera, radar) Ground Station Data processing and interpretation Flight demonstration 3
 for localization, octomap mapping, PID")
4 First demonstration (June 2015) Waypoint navigation using vision-based localization and mapping On-board sensor fusion (IMU/vision) for localization, octomap mapping, PID control 4






5 Demonstrations in industrial environment (2016) New functionalities Automatic take-off and landing using laser telemeter Yaw control from 3D coordinates Trajectory tracking Obstacle detection and avoidance Asctec Pelican platform
 Stereo SLAM Kalman sensor fusion MPC guidance (4) Waypoint server ELAS (2) Depth map OCTOMAP")
 A. Geiger et al.")
 S.")
6 Supervision Embedded perception and control loop Multi-sensor State estimation Lidar IMU Low-level control Guidance and control Stereo rig evo (1) Stereo SLAM Kalman sensor fusion MPC guidance (4) Waypoint server ELAS (2) Depth map OCTOMAP (3) 3D model Ground station 6 Environment modeling (1) M. Sanfourche et al., «A realtime embedded stereo odometry for MAV applications», IROS, 2013 (2) A. Geiger et al., «Efficient Large-Scale Stereo Matching», ACCV, 2010 (3) A. Wurm et al., «Octomap: an efficient probabilistic 3D Mapping Framework based on octrees», Autonomous Robots, 2013 (4) S. Bertrand et al. «MPC Strategies for Cooperative Guidance of Autonomous Vehicles», AerospaceLab Journal, 2014 Emergency button
7 Supervision Vision-based localization: evo Multi-sensor State estimation Lidar IMU Low-level control Guidance and control Stereo rig evo Stereo SLAM Kalman sensor fusion MPC guidance Waypoint server ELAS Depth map OCTOMAP 3D model Ground station Environment modeling Emergency button 7
8 Vision-based localization: evo Computes position and attitude using 3D sensors (stereo rig or RGB-D) 20 Hz on a usual embedded CPU (Core2duo, i5, i7) Many flight hours in the last 4 years Operating principles Map of 3D landmarks built on-line + localization in image => position and attitude Key-frame scheme to limit complexity (update on number of visible landmarks) 8

9 Vision-based localization: evo Localization Thread KLT tracking Outlier filtering Harris points Homogeneous repartition in image Mapping Thread 3-point algorithm Robust RANSAC Nonlinear refinement Epipolar exhaustive search Multi-scale Outlier filtering Other features Handles large fields of view using distortion models RANSAC management of 3D landmarks 9
10 Supervision Multi-sensor state estimation Multi-sensor State estimation Lidar IMU Low-level control Guidance and control Stereo rig evo Stereo SLAM Kalman sensor fusion MPC guidance Waypoint server ELAS Depth map OCTOMAP 3D model Ground station Environment modeling Emergency button 10
11 Multi-sensor state estimation (Kalman filter) Prediction of position and velocity using IMU measurements [accelerometers at 100 Hz] Filtered orientation provided by Asctec IMU [100 Hz] P k + 1 = P k + v k δt v k + 1 = v k + R θ k a IMU + g δt θ k + 1 = θ IMU Correction using evo position measurements [20 Hz] 11
12 Supervision Environment modeling for safe navigation Multi-sensor State estimation Lidar IMU Low-level control Guidance and control Stereo rig evo Stereo SLAM Kalman sensor fusion MPC guidance Waypoint server ELAS Depth map OCTOMAP 3D model Ground station Environment modeling Emergency button 12
 Integration of")




13 3D environment modeling for safe navigation Discretized 3D voxel model (Octomap) Integration of depth maps (vision-based or sensor-based) in association with vehicle estimated position and attitude Probabilistic multi-scale representation of free/occupied/unexplored cells 1-2 Hz on embedded CPU 3D stereo Image 3D kinect Long-distance indoor/outdoor 3D reconstruction M. Sanfourche et al (a) A. Wurm et al., «Octomap: an efficient probabilistic 3D Mapping Framework based on octrees», Autonomous Robots, 2013
 Efficient for collision")

14 3D environment modeling for safe navigation Computation of an obstacle distance map from the voxel Octomap Incremental Euclidean Distance Transform (b) Efficient for collision checking: single call per position (b) B. Lau et al., «Efficient grid-based spatial representations for robot navigation in dynamic environments», Robotics and Autonomous Systems,
15 Supervision Guidance for autonomous navigation Multi-sensor State estimation Lidar IMU Low-level control Guidance and control Stereo rig evo Stereo SLAM Kalman sensor fusion MPC guidance Waypoint server ELAS Depth map OCTOMAP 3D model Ground station Environment modeling Emergency button 15
16 Guidance for autonomous navigation Control of translational dynamics Waypoint stabilisation, trajectory tracking, obstacle avoidance Double integrator discretized model, acceleration control input Model Predictive Control Find optimal control input sequence minimizing a multi-criterion cost Sequence of H c control inputs: * k H U U c k k Predicted states on H p (>H c ) steps U Arg Min J x, U, X k U u, u,..., u k k k1 kh c 1 k X k xk1, xk2,..., xkh p Takes into account future behaviour and environment Handle constraints on control inputs Optimization required => computation time should be limited 16

17 Guidance for autonomous navigation Multi-criterion cost function to be minimized High-amplitude control inputs Deviation from reference trajectory Distance to obstacles on predicted trajectories Search for sub-optimal solution in pre-discretized space Limits and bounds computational cost Successive avoidance planes tested 17

18 Supervision Supervision Multi-sensor State estimation Lidar IMU Low-level control Guidance and control Stereo rig evo Stereo SLAM Kalman sensor fusion MPC guidance Waypoint server ELAS Depth map OCTOMAP 3D model Ground station Environment modeling Emergency button 18


19 Supervision state machine for flight phases Human pilot puts thrust back to zero Landed Human pilot activates autopilot Thrust stick at takeoff value EMERGENCY Landing Taking-off MAV is above landing position OR Emergency landing required - Stay in place with remaining healthy sensors - Emergency landing can be activated from ground station - In last resort, control is given back to safety pilot Nominal thrust reached Mission Calibrated First waypoint validated 19
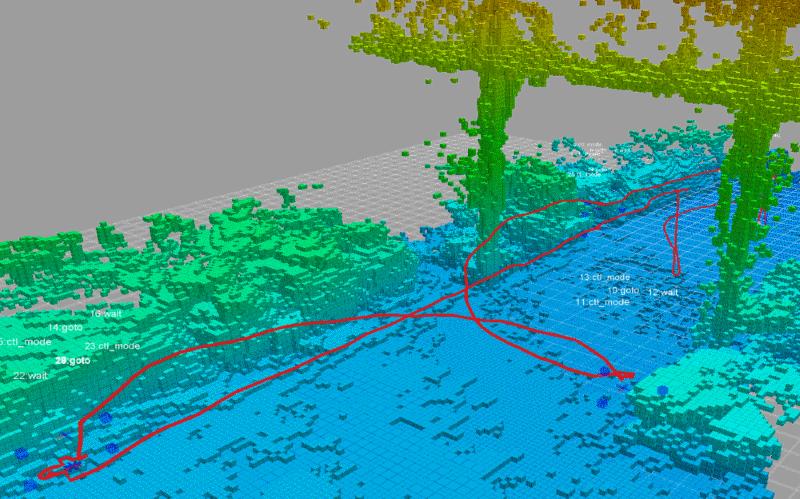


20 Experimental Results in SNCF warehouse 20



 3.")
21 FP7 EUROC Use case overview European Robotics Challenge Autonomous damage inspection in power substation Vision-based autonomous exploration and mapping Freestyle (August 2016) 1. Autonomous exploration in GPS-denied environment 2. Dynamic non-cooperative obstacle avoidance Showcase (March 2017) 3. Many thin, hollow and linear structures 4. Variable illumination conditions (reduced light)


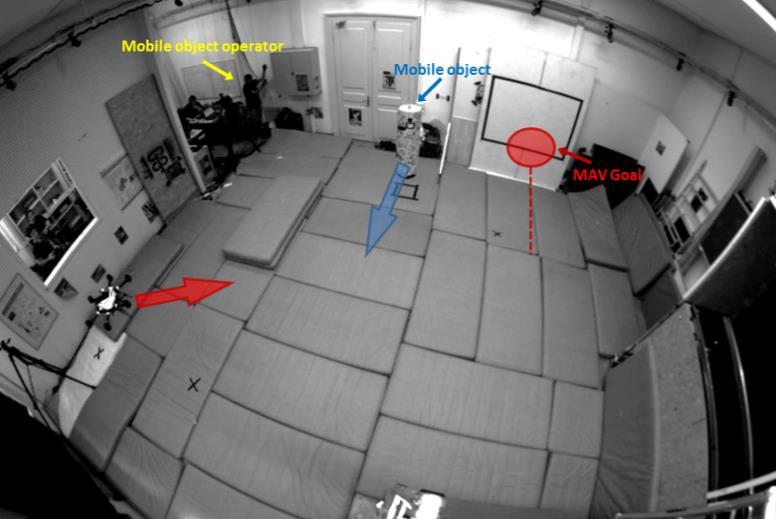

22 FP7 EUROC Freestyle results Autonomous Exploration Mobile Object Tracking and avoidance

23 Autonomous navigation in presence of mobile objects Stereo-vision for detection and motion estimation 1. Dense residual optical flow 2. Sparse feature-clustering Model Predictive Control for safe trajectory definition Multi-objective criterion Systematic search approach + Detection and avoidance of mobile objects Everything computed on-board Successful experiments Mobile robot with GPU MAV with embedded CPU

24 FP7 Euroc Avoidance of Mobile object
 in July 2017 FP7")

25 Current and future work New demonstrations in ONERA / SNCF partnership Wall inspection Mobile objects Demonstration at IFAC WC (Toulouse) in July 2017 FP7 Euroc Showcase Autonomous exploration (volume coverage) in presence of thin / hollow structures ONERA project on perception and guidance for multiple vehicles ( ) 25
26 Related publications J. Marzat, S. Bertrand, A. Eudes, M. Sanfourche, J. Moras, Reactive MPC for autonomous MAV navigation in indoor cluttered environments: flight experiments, IFAC WC 2017 D.K. Phung, B. Hérissé, J. Marzat, S. Bertrand, Model Predictive Control for Autonomous Navigation Using Embedded Graphics Processing Unit, IFAC WC 2017 H. Roggeman, J. Marzat, A. Bernard-Brunel, G. Le Besnerais, Autonomous exploration with prediction of the quality of vision-based localization, IFAC WC 2017 H. Roggeman, J. Marzat, A. Bernard-Brunel, G. Le Besnerais, Prediction of the scene quality for stereo vision-based autonomous navigation, IFAC IAV 2016 N. Piasco, J. Marzat, M. Sanfourche, Collaborative localization and formation flying using distributed stereo-vision, ICRA 2016 J. Marzat, J. Moras, A. Plyer, A. Eudes, P. Morin, Vision-based localization mapping and control for autonomous MAV - EuRoC challenge results, ODAS 2015 H. Roggeman, J. Marzat, M. Sanfourche, A. Plyer, Embedded vision-based localization and model predictive control for autonomous exploration, IROS VICOMOR 2014 S. Bertrand, J. Marzat, H. Piet-Lahanier, A. Kahn, Y. Rochefort, MPC Strategies for Cooperative Guidance of Autonomous Vehicles, AerospaceLab Journal, 2014 M. Sanfourche, A. Plyer, A. Bernard-Brunel, G. Le Besnerais, 3DSCAN: Online egolocalization and environment mapping for micro aerial vehicles. AerospaceLab Journal,
Autonomous and Safe Inspection of an Industrial Warehouse by a Multi-rotor MAV
 Autonomous and Safe Inspection of an Industrial Warehouse by a Multi-rotor MAV Alexandre Eudes, Julien Marzat, Martial Sanfourche, Julien Moras, Sylvain Bertrand Abstract This paper reports field tests
Autonomous and Safe Inspection of an Industrial Warehouse by a Multi-rotor MAV Alexandre Eudes, Julien Marzat, Martial Sanfourche, Julien Moras, Sylvain Bertrand Abstract This paper reports field tests
Reactive MPC for Autonomous MAV Navigation in Indoor Cluttered Environments: Flight Experiments
 Reactive MPC for Autonomous MAV Navigation in Indoor Cluttered Environments: Flight Experiments Julien Marzat Sylvain Bertrand Alexandre Eudes Martial Sanfourche Julien Moras ONERA - The French Aerospace
Reactive MPC for Autonomous MAV Navigation in Indoor Cluttered Environments: Flight Experiments Julien Marzat Sylvain Bertrand Alexandre Eudes Martial Sanfourche Julien Moras ONERA - The French Aerospace
The AZUR project. Development of autonomous navigation software for urban operation of VTOL-type UAV. Yoko Watanabe
 The AZUR project Development of autonomous navigation software for urban operation of VTOL-type UAV Yoko Watanabe Dept. of Systems Control and Flight Dynalics (DCSD) MAVRC Garden Workshop 02/ 07 / 2015
The AZUR project Development of autonomous navigation software for urban operation of VTOL-type UAV Yoko Watanabe Dept. of Systems Control and Flight Dynalics (DCSD) MAVRC Garden Workshop 02/ 07 / 2015
Vision-based localization, mapping and control for autonomous MAV: EuRoC challenge results
 Vision-based localization, mapping and control for autonomous MAV: EuRoC challenge results Julien Marzat, Julien Moras, Aurélien Plyer, Alexandre Eudes, Pascal Morin To cite this version: Julien Marzat,
Vision-based localization, mapping and control for autonomous MAV: EuRoC challenge results Julien Marzat, Julien Moras, Aurélien Plyer, Alexandre Eudes, Pascal Morin To cite this version: Julien Marzat,
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
Lecture: Autonomous micro aerial vehicles
 Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments
 3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles
 Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
Visual-Inertial Localization and Mapping for Robot Navigation
 Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Detection, Estimation and Avoidance of Mobile Objects Using Stereo-Vision and Model Predictive Control
 Detection, Estimation and Avoidance of Mobile Objects Using Stereo-Vision and Model Predictive Control Hélène Roggeman, Julien Marzat, Maxime Derome, Martial Sanfourche, Alexandre Eudes, Guy Le Besnerais
Detection, Estimation and Avoidance of Mobile Objects Using Stereo-Vision and Model Predictive Control Hélène Roggeman, Julien Marzat, Maxime Derome, Martial Sanfourche, Alexandre Eudes, Guy Le Besnerais
Autonomous Corridor Flight of a UAV Using alow-costandlight-weightrgb-dcamera
 Autonomous Corridor Flight of a UAV Using alow-costandlight-weightrgb-dcamera Sven Lange, Niko Sünderhauf,Peer Neubert,Sebastian Drews, and Peter Protzel Abstract. We describe the first application of
Autonomous Corridor Flight of a UAV Using alow-costandlight-weightrgb-dcamera Sven Lange, Niko Sünderhauf,Peer Neubert,Sebastian Drews, and Peter Protzel Abstract. We describe the first application of
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains
 Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Visual SLAM for small Unmanned Aerial Vehicles
 Visual SLAM for small Unmanned Aerial Vehicles Margarita Chli Autonomous Systems Lab, ETH Zurich Simultaneous Localization And Mapping How can a body navigate in a previously unknown environment while
Visual SLAM for small Unmanned Aerial Vehicles Margarita Chli Autonomous Systems Lab, ETH Zurich Simultaneous Localization And Mapping How can a body navigate in a previously unknown environment while
4D Crop Analysis for Plant Geometry Estimation in Precision Agriculture
 4D Crop Analysis for Plant Geometry Estimation in Precision Agriculture MIT Laboratory for Information & Decision Systems IEEE RAS TC on Agricultural Robotics and Automation Webinar #37 Acknowledgements
4D Crop Analysis for Plant Geometry Estimation in Precision Agriculture MIT Laboratory for Information & Decision Systems IEEE RAS TC on Agricultural Robotics and Automation Webinar #37 Acknowledgements
다중센서기반자율시스템의모델설계및개발 이제훈차장 The MathWorks, Inc. 2
 1 다중센서기반자율시스템의모델설계및개발 이제훈차장 2017 The MathWorks, Inc. 2 What we will see today 3 Functional Segmentation of Autonomous System Aircraft/ Platform Sense Perceive Plan & Decide Control Connect/ Communicate
1 다중센서기반자율시스템의모델설계및개발 이제훈차장 2017 The MathWorks, Inc. 2 What we will see today 3 Functional Segmentation of Autonomous System Aircraft/ Platform Sense Perceive Plan & Decide Control Connect/ Communicate
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Scanning and Printing Objects in 3D Jürgen Sturm
 Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
ASTRIUM Space Transportation
 SIMU-LANDER Hazard avoidance & advanced GNC for interplanetary descent and soft-landing S. Reynaud, E. Ferreira, S. Trinh, T. Jean-marius 3rd International Workshop on Astrodynamics Tools and Techniques
SIMU-LANDER Hazard avoidance & advanced GNC for interplanetary descent and soft-landing S. Reynaud, E. Ferreira, S. Trinh, T. Jean-marius 3rd International Workshop on Astrodynamics Tools and Techniques
Lecture 10 Dense 3D Reconstruction
 Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Vol agile avec des micro-robots volants contrôlés par vision
 Vol agile avec des micro-robots volants contrôlés par vision From Active Perception to Event-based Vision Henri Rebecq from Prof. Davide Scaramuzza s lab GT UAV 17 Novembre 2016, Paris Davide Scaramuzza
Vol agile avec des micro-robots volants contrôlés par vision From Active Perception to Event-based Vision Henri Rebecq from Prof. Davide Scaramuzza s lab GT UAV 17 Novembre 2016, Paris Davide Scaramuzza
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza
 Davide Scaramuzza") Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
Visual Navigation for Micro Air Vehicles
 Visual Navigation for Micro Air Vehicles Abraham Bachrach, Albert S. Huang, Daniel Maturana, Peter Henry, Michael Krainin, Dieter Fox, and Nicholas Roy Computer Science and Artificial Intelligence Laboratory,
Visual Navigation for Micro Air Vehicles Abraham Bachrach, Albert S. Huang, Daniel Maturana, Peter Henry, Michael Krainin, Dieter Fox, and Nicholas Roy Computer Science and Artificial Intelligence Laboratory,
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Aerial Robotic Autonomous Exploration & Mapping in Degraded Visual Environments. Kostas Alexis Autonomous Robots Lab, University of Nevada, Reno
 Aerial Robotic Autonomous Exploration & Mapping in Degraded Visual Environments Kostas Alexis Autonomous Robots Lab, University of Nevada, Reno Motivation Aerial robotic operation in GPS-denied Degraded
Aerial Robotic Autonomous Exploration & Mapping in Degraded Visual Environments Kostas Alexis Autonomous Robots Lab, University of Nevada, Reno Motivation Aerial robotic operation in GPS-denied Degraded
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage Dr. Jürgen Sturm Agenda for Today Exploration with a single robot Coordinated
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage Dr. Jürgen Sturm Agenda for Today Exploration with a single robot Coordinated
Low Cost solution for Pose Estimation of Quadrotor
 Low Cost solution for Pose Estimation of Quadrotor mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute of Technology, Kanpur Mangal Kothari
Low Cost solution for Pose Estimation of Quadrotor mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute of Technology, Kanpur Mangal Kothari
Technical Paper of HITCSC Team for The International Aerial Robotics Competition
 Technical Paper of HITCSC Team for The International Aerial Robotics Competition Qingtao Yu, Yuanhong Li, Hang Yu, Haodi Yao, Rui Xing, Qi Zhao, Xiaowei Xing Harbin Institute of Tecnology ABSTRACT This
Technical Paper of HITCSC Team for The International Aerial Robotics Competition Qingtao Yu, Yuanhong Li, Hang Yu, Haodi Yao, Rui Xing, Qi Zhao, Xiaowei Xing Harbin Institute of Tecnology ABSTRACT This
A Vision and GPS-Based Real-Time Trajectory Planning for MAV in Unknown Urban Environments
 A Vision and GPS-Based Real-Time Trajectory Planning for MAV in Unknown Urban Environments Gerardo Ramon Flores Colunga, Shuting Zhuo, Rogelio Lozano, Pedro Castillo To cite this version: Gerardo Ramon
A Vision and GPS-Based Real-Time Trajectory Planning for MAV in Unknown Urban Environments Gerardo Ramon Flores Colunga, Shuting Zhuo, Rogelio Lozano, Pedro Castillo To cite this version: Gerardo Ramon
FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs
 FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs W. Nicholas Greene Robust Robotics Group, MIT CSAIL LPM Workshop IROS 2017 September 28, 2017 with Nicholas Roy 1
FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs W. Nicholas Greene Robust Robotics Group, MIT CSAIL LPM Workshop IROS 2017 September 28, 2017 with Nicholas Roy 1
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Announcements. Exam #2 next Thursday (March 13) Covers material from Feb. 11 through March 6
 Covers material from Feb. 11 through March 6") Multi-Robot Path Planning and Multi-Robot Traffic Management March 6, 2003 Class Meeting 16 Announcements Exam #2 next Thursday (March 13) Covers material from Feb. 11 through March 6 Up to Now Swarm-Type
Multi-Robot Path Planning and Multi-Robot Traffic Management March 6, 2003 Class Meeting 16 Announcements Exam #2 next Thursday (March 13) Covers material from Feb. 11 through March 6 Up to Now Swarm-Type
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
CONTENT ENGINEERING & VISION LABORATORY. Régis Vinciguerra
 CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Unmanned Aerial Vehicles
 Unmanned Aerial Vehicles Embedded Control Edited by Rogelio Lozano WILEY Table of Contents Chapter 1. Aerodynamic Configurations and Dynamic Models 1 Pedro CASTILLO and Alejandro DZUL 1.1. Aerodynamic
Unmanned Aerial Vehicles Embedded Control Edited by Rogelio Lozano WILEY Table of Contents Chapter 1. Aerodynamic Configurations and Dynamic Models 1 Pedro CASTILLO and Alejandro DZUL 1.1. Aerodynamic
Real-Time Vision-Based State Estimation and (Dense) Mapping
 Mapping") Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
Stable Vision-Aided Navigation for Large-Area Augmented Reality
 Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
AN INCREMENTAL SLAM ALGORITHM FOR INDOOR AUTONOMOUS NAVIGATION
 20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
Aerial and Ground-based Collaborative Mapping: An Experimental Study
 Aerial and Ground-based Collaborative Mapping: An Experimental Study Ji Zhang and Sanjiv Singh Abstract We here present studies to enable aerial and ground-based collaborative mapping in GPS-denied environments.
Aerial and Ground-based Collaborative Mapping: An Experimental Study Ji Zhang and Sanjiv Singh Abstract We here present studies to enable aerial and ground-based collaborative mapping in GPS-denied environments.
Distributed Vision-Aided Cooperative Navigation Based on Three-View Geometry
 Distributed Vision-Aided Cooperative Navigation Based on hree-view Geometry Vadim Indelman, Pini Gurfil Distributed Space Systems Lab, Aerospace Engineering, echnion Ehud Rivlin Computer Science, echnion
Distributed Vision-Aided Cooperative Navigation Based on hree-view Geometry Vadim Indelman, Pini Gurfil Distributed Space Systems Lab, Aerospace Engineering, echnion Ehud Rivlin Computer Science, echnion
AUTONOMOUS NAVIGATION IN COMPLEX INDOOR AND OUTDOOR ENVIRONMENTS WITH MICRO AERIAL VEHICLES. Shaojie Shen A DISSERTATION
 AUTONOMOUS NAVIGATION IN COMPLEX INDOOR AND OUTDOOR ENVIRONMENTS WITH MICRO AERIAL VEHICLES Shaojie Shen A DISSERTATION in Electrical and Systems Engineering Presented to the Faculties of the University
AUTONOMOUS NAVIGATION IN COMPLEX INDOOR AND OUTDOOR ENVIRONMENTS WITH MICRO AERIAL VEHICLES Shaojie Shen A DISSERTATION in Electrical and Systems Engineering Presented to the Faculties of the University
A Reactive Bearing Angle Only Obstacle Avoidance Technique for Unmanned Ground Vehicles
 Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 54 A Reactive Bearing Angle Only Obstacle Avoidance Technique for
Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 54 A Reactive Bearing Angle Only Obstacle Avoidance Technique for
Survey on Computer Vision for UAVs: Current Developments and Trends
 J Intell Robot Syst (2017) 87:141 168 DOI 10.1007/s10846-017-0483-z Survey on Computer Vision for UAVs: Current Developments and Trends Christoforos Kanellakis George Nikolakopoulos Received: 28 April
J Intell Robot Syst (2017) 87:141 168 DOI 10.1007/s10846-017-0483-z Survey on Computer Vision for UAVs: Current Developments and Trends Christoforos Kanellakis George Nikolakopoulos Received: 28 April
Image-based Visual Perception and Representation for Collision Avoidance
 Image-based Visual Perception and Representation for Collision Avoidance Cevahir Cigla Jet Propulsion Laboratory / California Institute of Technology cevahircigla@gmail.com Roland Brockers Jet Propulsion
Image-based Visual Perception and Representation for Collision Avoidance Cevahir Cigla Jet Propulsion Laboratory / California Institute of Technology cevahircigla@gmail.com Roland Brockers Jet Propulsion
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
StereoScan: Dense 3D Reconstruction in Real-time
 STANFORD UNIVERSITY, COMPUTER SCIENCE, STANFORD CS231A SPRING 2016 StereoScan: Dense 3D Reconstruction in Real-time Peirong Ji, pji@stanford.edu June 7, 2016 1 INTRODUCTION In this project, I am trying
STANFORD UNIVERSITY, COMPUTER SCIENCE, STANFORD CS231A SPRING 2016 StereoScan: Dense 3D Reconstruction in Real-time Peirong Ji, pji@stanford.edu June 7, 2016 1 INTRODUCTION In this project, I am trying
INTELLIGENT AUTONOMOUS SYSTEMS LAB
 Matteo Munaro 1,3, Alex Horn 2, Randy Illum 2, Jeff Burke 2, and Radu Bogdan Rusu 3 1 IAS-Lab at Department of Information Engineering, University of Padova 2 Center for Research in Engineering, Media
Matteo Munaro 1,3, Alex Horn 2, Randy Illum 2, Jeff Burke 2, and Radu Bogdan Rusu 3 1 IAS-Lab at Department of Information Engineering, University of Padova 2 Center for Research in Engineering, Media
Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor
 Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor Chang Liu & Stephen D. Prior Faculty of Engineering and the Environment, University of Southampton,
Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor Chang Liu & Stephen D. Prior Faculty of Engineering and the Environment, University of Southampton,
Anibal Ollero Professor and head of GRVC University of Seville (Spain)
") Aerial Manipulation Anibal Ollero Professor and head of GRVC University of Seville (Spain) aollero@us.es Scientific Advisor of the Center for Advanced Aerospace Technologies (Seville, Spain) aollero@catec.aero
Aerial Manipulation Anibal Ollero Professor and head of GRVC University of Seville (Spain) aollero@us.es Scientific Advisor of the Center for Advanced Aerospace Technologies (Seville, Spain) aollero@catec.aero
UAV Position and Attitude Sensoring in Indoor Environment Using Cameras
 UAV Position and Attitude Sensoring in Indoor Environment Using Cameras 1 Peng Xu Abstract There are great advantages of indoor experiment for UAVs. Test flights of UAV in laboratory is more convenient,
UAV Position and Attitude Sensoring in Indoor Environment Using Cameras 1 Peng Xu Abstract There are great advantages of indoor experiment for UAVs. Test flights of UAV in laboratory is more convenient,
Pose Estimation and Control of Micro-Air Vehicles
 Pose Estimation and Control of Micro-Air Vehicles IVAN DRYANOVSKI, Ph.D. Candidate, Computer Science ROBERTO G. VALENTI, Ph.D. Candidate, Electrical Engineering Mentor: JIZHONG XIAO, Professor, Electrical
Pose Estimation and Control of Micro-Air Vehicles IVAN DRYANOVSKI, Ph.D. Candidate, Computer Science ROBERTO G. VALENTI, Ph.D. Candidate, Electrical Engineering Mentor: JIZHONG XIAO, Professor, Electrical
arxiv: v1 [cs.ro] 26 Sep 2016
![arxiv: v1 [cs.ro] 26 Sep 2016](/thumbs/76/73303427.jpg "arxiv: v1 [cs.ro] 26 Sep 2016") Autonomous Exploration with a Low-Cost Quadrocopter using Semi-Dense Monocular SLAM Lukas von Stumberg 1, Vladyslav Usenko 1, Jakob Engel 1, Jörg Stückler 2, and Daniel Cremers 1 arxiv:1609.07835v1 [cs.ro]
Autonomous Exploration with a Low-Cost Quadrocopter using Semi-Dense Monocular SLAM Lukas von Stumberg 1, Vladyslav Usenko 1, Jakob Engel 1, Jörg Stückler 2, and Daniel Cremers 1 arxiv:1609.07835v1 [cs.ro]
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Autonomous Flight in Unstructured Environment using Monocular Image
 Autonomous Flight in Unstructured Environment using Monocular Image Saurav Kumar 1, Ashutosh Saxena 2 Department of Computer Science, Cornell University 1 sk2357@cornell.edu 2 asaxena@cs.cornell.edu I.
Autonomous Flight in Unstructured Environment using Monocular Image Saurav Kumar 1, Ashutosh Saxena 2 Department of Computer Science, Cornell University 1 sk2357@cornell.edu 2 asaxena@cs.cornell.edu I.
H2020 Space Robotic SRC- OG4
 H2020 Space Robotic SRC- OG4 CCT/COMET ORB Workshop on Space Rendezvous 05/12/2017 «Smart Sensors for Smart Missions» Contacts: Sabrina Andiappane, sabrina.andiappane@thalesaleniaspace.com Vincent Dubanchet,
H2020 Space Robotic SRC- OG4 CCT/COMET ORB Workshop on Space Rendezvous 05/12/2017 «Smart Sensors for Smart Missions» Contacts: Sabrina Andiappane, sabrina.andiappane@thalesaleniaspace.com Vincent Dubanchet,
OUTDOOR AND INDOOR NAVIGATION WITH MICROSOFT KINECT
 DICA-Dept. of Civil and Environmental Engineering Geodesy and Geomatics Section OUTDOOR AND INDOOR NAVIGATION WITH MICROSOFT KINECT Diana Pagliari Livio Pinto OUTLINE 2 The Microsoft Kinect sensor The
DICA-Dept. of Civil and Environmental Engineering Geodesy and Geomatics Section OUTDOOR AND INDOOR NAVIGATION WITH MICROSOFT KINECT Diana Pagliari Livio Pinto OUTLINE 2 The Microsoft Kinect sensor The
Recent developments in laser scanning
 Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
Removing Moving Objects from Point Cloud Scenes
 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Dense 3D Reconstruction from Autonomous Quadrocopters
 Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
Visual Odometry. Features, Tracking, Essential Matrix, and RANSAC. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
arxiv: v1 [cs.ro] 2 Sep 2017
![arxiv: v1 [cs.ro] 2 Sep 2017](/thumbs/76/73471107.jpg "arxiv: v1 [cs.ro] 2 Sep 2017") arxiv:1709.00525v1 [cs.ro] 2 Sep 2017 Sensor Network Based Collision-Free Navigation and Map Building for Mobile Robots Hang Li Abstract Safe robot navigation is a fundamental research field for autonomous
arxiv:1709.00525v1 [cs.ro] 2 Sep 2017 Sensor Network Based Collision-Free Navigation and Map Building for Mobile Robots Hang Li Abstract Safe robot navigation is a fundamental research field for autonomous
Autonomous Navigation and Exploration of a Quadrotor Helicopter in GPS-denied Indoor Environments
 Autonomous Navigation and Exploration of a Quadrotor Helicopter in GPS-denied Indoor Environments Markus Achtelik a, Abraham Bachrach b, Ruijie He b, Samuel Prentice b and Nicholas Roy b a Technische Universität
Autonomous Navigation and Exploration of a Quadrotor Helicopter in GPS-denied Indoor Environments Markus Achtelik a, Abraham Bachrach b, Ruijie He b, Samuel Prentice b and Nicholas Roy b a Technische Universität
Indoor UAV Positioning Using Stereo Vision Sensor
 Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 575 579 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) Indoor UAV Positioning Using Stereo Vision
Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 575 579 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) Indoor UAV Positioning Using Stereo Vision
ROBOT TEAMS CH 12. Experiments with Cooperative Aerial-Ground Robots
 ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery
 Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING
 STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING Yuan Yang, Ph.D. Student Zoltan Koppanyi, Post-Doctoral Researcher Charles K Toth, Research Professor SPIN Lab The University
STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING Yuan Yang, Ph.D. Student Zoltan Koppanyi, Post-Doctoral Researcher Charles K Toth, Research Professor SPIN Lab The University
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Visual Perception for Robots
 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Hybrids Mixed Approaches
 Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
GPS denied Navigation Solutions
 GPS denied Navigation Solutions Krishnraj Singh Gaur and Mangal Kothari ksgaur@iitk.ac.in, mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute
GPS denied Navigation Solutions Krishnraj Singh Gaur and Mangal Kothari ksgaur@iitk.ac.in, mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Davide Scaramuzza. University of Zurich
 Davide Scaramuzza University of Zurich Robotics and Perception Group http://rpg.ifi.uzh.ch/ Scaramuzza, D., Fraundorfer, F., Visual Odometry: Part I - The First 30 Years and Fundamentals, IEEE Robotics
Davide Scaramuzza University of Zurich Robotics and Perception Group http://rpg.ifi.uzh.ch/ Scaramuzza, D., Fraundorfer, F., Visual Odometry: Part I - The First 30 Years and Fundamentals, IEEE Robotics
Semantic Mapping and Reasoning Approach for Mobile Robotics
 Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
DOI: /ECMR IEEE Xplore:
 This paper has been accepted for publication in 2017 European Conference on Mobile Robots. DOI: 10.1109/ECMR.2017.8098709 IEEE Xplore: http://ieeexplore.ieee.org/document/8098709/ c 2017 IEEE. Personal
This paper has been accepted for publication in 2017 European Conference on Mobile Robots. DOI: 10.1109/ECMR.2017.8098709 IEEE Xplore: http://ieeexplore.ieee.org/document/8098709/ c 2017 IEEE. Personal
Dynamically Feasible Motion Planning for Micro Air Vehicles using an Egocylinder
 Dynamically Feasible Motion Planning for Micro Air Vehicles using an Egocylinder Anthony T. Fragoso, Cevahir Cigla, Roland Brockers, and Larry H. Matthies Abstract Onboard obstacle avoidance is a challenging,
Dynamically Feasible Motion Planning for Micro Air Vehicles using an Egocylinder Anthony T. Fragoso, Cevahir Cigla, Roland Brockers, and Larry H. Matthies Abstract Onboard obstacle avoidance is a challenging,
Automated Driving Development
 Automated Driving Development with MATLAB and Simulink MANOHAR REDDY M 2015 The MathWorks, Inc. 1 Using Model-Based Design to develop high quality and reliable Active Safety & Automated Driving Systems
Automated Driving Development with MATLAB and Simulink MANOHAR REDDY M 2015 The MathWorks, Inc. 1 Using Model-Based Design to develop high quality and reliable Active Safety & Automated Driving Systems
AUTONOMOUS DRONE NAVIGATION WITH DEEP LEARNING
 AUTONOMOUS DRONE NAVIGATION WITH DEEP LEARNING Nikolai Smolyanskiy, Alexey Kamenev, Jeffrey Smith Project Redtail May 8, 2017 100% AUTONOMOUS FLIGHT OVER 1 KM FOREST TRAIL AT 3 M/S 2 Why autonomous path
AUTONOMOUS DRONE NAVIGATION WITH DEEP LEARNING Nikolai Smolyanskiy, Alexey Kamenev, Jeffrey Smith Project Redtail May 8, 2017 100% AUTONOMOUS FLIGHT OVER 1 KM FOREST TRAIL AT 3 M/S 2 Why autonomous path
IEEE/CAA JOURNAL OF AUTOMATICA SINICA, VOL. 2, NO. 1, JANUARY Robust and Accurate Monocular Visual Navigation Combining IMU for a Quadrotor
 IEEE/CAA JOURNAL OF AUTOMATICA SINICA, VOL. 2, NO. 1, JANUARY 2015 33 Robust and Accurate Monocular Visual Navigation Combining IMU for a Quadrotor Wei Zheng, Fan Zhou, and Zengfu Wang Abstract In this
IEEE/CAA JOURNAL OF AUTOMATICA SINICA, VOL. 2, NO. 1, JANUARY 2015 33 Robust and Accurate Monocular Visual Navigation Combining IMU for a Quadrotor Wei Zheng, Fan Zhou, and Zengfu Wang Abstract In this
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
VINet: Visual-Inertial Odometry as a Sequence-to-Sequence Learning Problem
 VINet: Visual-Inertial Odometry as a Sequence-to-Sequence Learning Problem Presented by: Justin Gorgen Yen-ting Chen Hao-en Sung Haifeng Huang University of California, San Diego May 23, 2017 Original
VINet: Visual-Inertial Odometry as a Sequence-to-Sequence Learning Problem Presented by: Justin Gorgen Yen-ting Chen Hao-en Sung Haifeng Huang University of California, San Diego May 23, 2017 Original
A multilevel simulation framework for highly automated harvest processes enabled by environmental sensor systems
 A multilevel simulation framework for highly automated harvest processes enabled by environmental sensor systems Jannik Redenius, M.Sc., Matthias Dingwerth, M.Sc., Prof. Dr. Arno Ruckelshausen, Faculty
A multilevel simulation framework for highly automated harvest processes enabled by environmental sensor systems Jannik Redenius, M.Sc., Matthias Dingwerth, M.Sc., Prof. Dr. Arno Ruckelshausen, Faculty
Individual Lab Report #6. Pratik Chatrath. Team A / Team Avengers. Teammates: Tushar Agrawal, Sean Bryan. January 28, 2016
 Individual Lab Report #6 Pratik Chatrath Team A / Team Avengers Teammates: Tushar Agrawal, Sean Bryan January 28, 2016 I. Individual Progress Overall in the last semester, I worked on developing obstacle
Individual Lab Report #6 Pratik Chatrath Team A / Team Avengers Teammates: Tushar Agrawal, Sean Bryan January 28, 2016 I. Individual Progress Overall in the last semester, I worked on developing obstacle
Accurate Figure Flying with a Quadrocopter Using Onboard Visual and Inertial Sensing
 Accurate Figure Flying with a Quadrocopter Using Onboard Visual and Inertial Sensing Jakob Engel, Jürgen Sturm, Daniel Cremers Abstract We present an approach that enables a low-cost quadrocopter to accurately
Accurate Figure Flying with a Quadrocopter Using Onboard Visual and Inertial Sensing Jakob Engel, Jürgen Sturm, Daniel Cremers Abstract We present an approach that enables a low-cost quadrocopter to accurately
Innovative Visual Navigation Solutions for ESA s Lunar Lander Mission Dr. E. Zaunick, D. Fischer, Dr. I. Ahrns, G. Orlando, B. Polle, E.
 Lunar Lander Phase B1 Innovative Visual Navigation Solutions for ESA s Lunar Lander Mission Dr. E. Zaunick, D. Fischer, Dr. I. Ahrns, G. Orlando, B. Polle, E. Kervendal p. 0 9 th International Planetary
Lunar Lander Phase B1 Innovative Visual Navigation Solutions for ESA s Lunar Lander Mission Dr. E. Zaunick, D. Fischer, Dr. I. Ahrns, G. Orlando, B. Polle, E. Kervendal p. 0 9 th International Planetary
Vision-Based Navigation Solution for Autonomous Indoor Obstacle Avoidance Flight
 Vision-Based Navigation Solution for Autonomous Indoor Obstacle Avoidance Flight Kirill E. Shilov 1, Vladimir V. Afanasyev 2 and Pavel A. Samsonov 3 1 Moscow Institute of Physics and Technology (MIPT),
Vision-Based Navigation Solution for Autonomous Indoor Obstacle Avoidance Flight Kirill E. Shilov 1, Vladimir V. Afanasyev 2 and Pavel A. Samsonov 3 1 Moscow Institute of Physics and Technology (MIPT),
Scanning and Printing Objects in 3D
 Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
H2020 Space Robotic SRC- OG4
 H2020 Space Robotic SRC- OG4 2 nd PERASPERA workshop Presentation by Sabrina Andiappane Thales Alenia Space France This project has received funding from the European Union s Horizon 2020 research and
H2020 Space Robotic SRC- OG4 2 nd PERASPERA workshop Presentation by Sabrina Andiappane Thales Alenia Space France This project has received funding from the European Union s Horizon 2020 research and
Overview of the Trimble TX5 Laser Scanner
 Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D