Visual Perception for Robots
|
|
|
- Charla Marsh
- 5 years ago
- Views:
Transcription

1 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems




2 Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot Soccer robot Communication robot Service robot Exploration robot 2



3 Our Humanoid Soccer Robots Dynaped Copedo NimbRo-OP Size: cm, Weight: 6,6-8 kg articulated joints PC, wide-angle camera(s), IMU 3

4 Visual Perception YUV color segmentation Recognition of field, ball, goals, obstacles, field lines, corners Egocentric modeling Probabilistic localization [Schulz & Behnke, Advanced Robotics 2012] 4
5 Features for Localization Goals Field lines Corners of lines Side poles Egocentric view Localization


6 Observation Likelihood Lines Side poles Line corners All features

7 RoboCup 2013 Final NimbRo 4:0 CIT Brains => Won fifth time in a row. 7

8 Intuitive Multimodal Communication Not keyboard, mouse, screen, but Eye contact Facing with head and trunk Facial expressions Gestures Speech Body language Transfer established human communication techniques to the man-machine interface Application: museum guide






9 Perception of Communication Partners Detection and tracking of faces Head pose estimation [Bennewitz Behnke: Humanoids 05] [Vatahska, Bennewitz, Behnke: Humanoids 07] Gesture recognition [Axenbeck, Bennewitz, Behnke, Burgard: Humanoids 08] Speech recognition (Loquendo)
, 2013] 10")
10 Robotinho in Deutsches Museum Bonn [Nieuwenhuisen & Behnke, Journal of Social Robotics (SORO), 2013] 10


11 Our Service Robots Dynamaid Cosero Size: cm, weight: kg 36 articulated joints PC, laser scanner, Kinect, microphone, 11

12 2D Mapping of the Environment 12

13 3D-Mapping with Surfels 13

14 3D-Mapping with Surfels 14

15 3D-Mapping and Localization Registration of 3D laser scans Representation of point distributions in voxels Drivability assessment trough region growing Robust localization using 2D laser scans [Kläß, Stückler, Behnke: Robotik 2012] 15








16 3D Mapping by RGB-D SLAM Modelling of shape and color distributions in Voxels Local multiresolution Efficient registration of views on CPU Global optimization [Stückler, Behnke: Journal of Visual Communication and Image Representation 2013] 2,5cm 5cm Multi-camera SLAM [Stoucken, Diplomarbeit 2013] 16





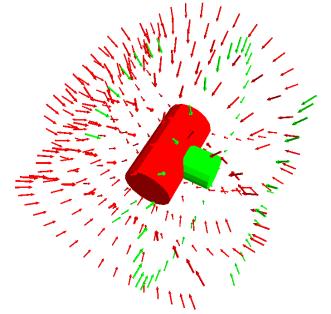
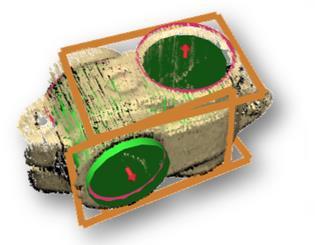
17 Learning and Tracking Object Models Modeling of objects by RGB-D-SLAM Real-time registration with current RGB-D image 17


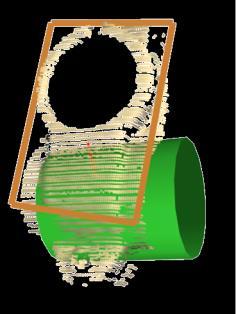
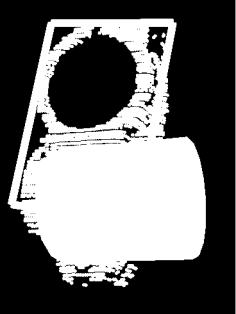
18 Transfer of Object Knowledge Non-rigid registration of known models and actual object Transfer of grasp and end-effector [Stückler, Behnke: submitted to ICRA] 18

 Flexible grasping of many")

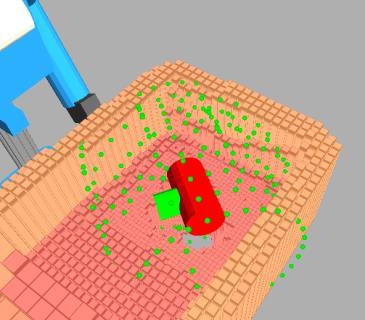
19 Analysis of Table-top Scenes and Grasp Planning Detection of Clusters above horizontal plane Two grasps (top, side) Flexible grasping of many unknown objects [Stückler, Steffens, Holz, Behnke, Robotics and Autonomous Systems 2012] 19




20 Tool use: Bottle Opener Perception of tool tip Extension of arm kinematics Perception of crown cap 20


21 Tool use: Pair of Tongs Perception of tool tip Extension of arm kinematics Estimation of sausage pose Our team NimbRo has won the last three international competitions 21


 30cm 1m")


![RoboCup 2010] Gesture](/docs-images/92/108866873/images/22-5.jpg "recognition Natural gaze")
22 Perception of Persons Detection in laser scans and tracking Visual verification and identification (VeriLook) 30cm 1m Systematic exploration Speech recognition and synthesis (Loquendo) [Stückler & Behnke, RoboCup 2010] Gesture recognition Natural gaze control [Droeschel et al, ICRA 2011] 22
 Object")
23 Visual Object Recognition Object detection with laser or Kinect Recognition based on color and texture features (SURF) Object tracking 23





24 Semantic Mapping Pixel-wise classification of RGB-D images by random forests Inner nodes compare color / depth of regions Size normalization Training and recall on GPU 3D fusion through RGB-D SLAM Evaluation on own data set and NYU depth v2 [Stückler, Biresev, Behnke: IROS 2012] Accuracy in % Ø Classes Ø Pixels Ground truth Segmentation Silberman et al ,6 58,6 Couprie et al ,5 64,5 Random forest 65,9 68,6 3D-Fusion 67,0 70,9 [Stückler et al., Accepted with minor revision for Journal of Real-Time Image Processing] 24




25 Learning Depth-Sensitive CRFs SLIC+depth super pixels Unary features: random forest Height feature Pairwise features Color contrast Directed angle Depth difference Normal differences Results: similarity between superpixel normals Random forest CRF prediction Ground truth [Müller and Behnke, submitted to ICRA] 25




26 Object Class Detection in RGB-D Hough forests make not only object class decision, but describe object center RGB-D objects data set Color and depth features Training with rendered scenes Detection of object position and orientation Scene Class prob. Object centers Orientation Detected objects Depth helps a lot [Badami, Stückler, Behnke: SPME 2013] 26










27 Bin Picking Known objects in transport box Matching of graphs of 2D and 3D shape primitives 3D 2D Grasp and motion planning Offline Online [Nieuwenhuisen et al.: ICRA 2013] 27




28 Articulated Objects: Doors Door motion is important Detection of changes between maps Instantiation of door models Estimation of opening angle from laser scan Localization more reliable, more precise Navigation planning can use door opening state [Nieuwenhuisen, Stückler, Behnke, ICRA 10] 28

29 Adaptive Person Model Model: geometric primitives, connected by joints Registration through articulated ICP Adaptation of primitive parameters to body proportions [Droeschel, Behnke: ICIRA 2011] 29



30 Hierarchical Object Discovery trough Motion Segmentation Motion is strong segmentation cue Both camera and object motion Segment-wise registration of a sequence Inference of a segment hierarchy [Stückler, Behnke: IJCAI 2013] 30
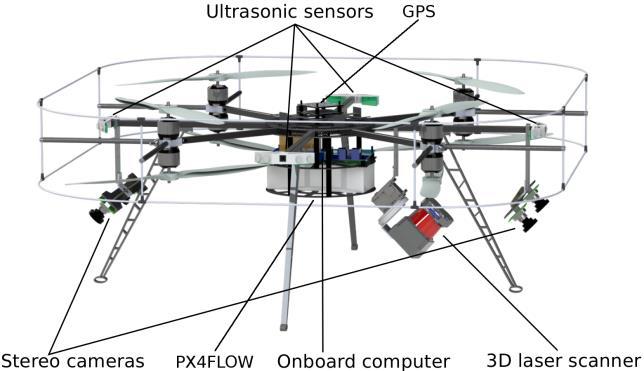



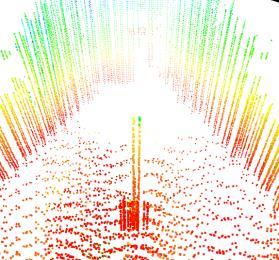
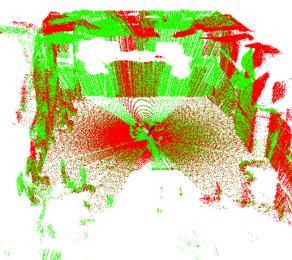
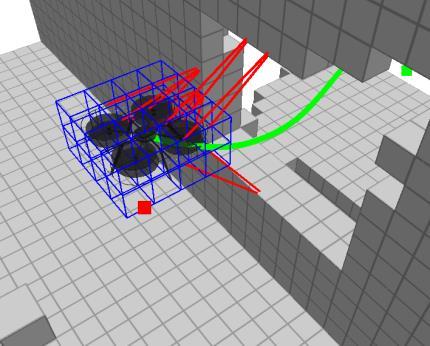



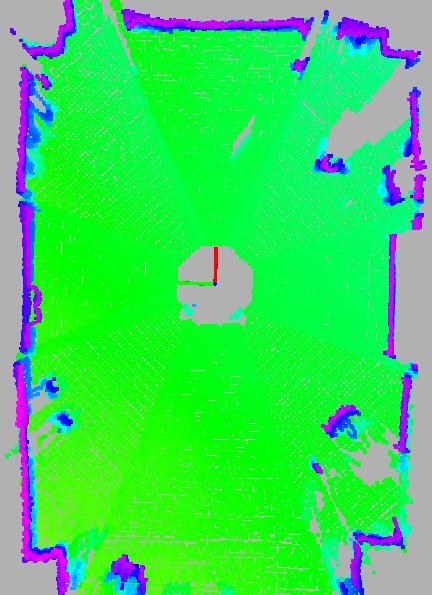
31 Autonomous Flight near Obstacles Octocopter with many sensors and strong computer Multimodal obstacle detection 3D laser scanner Stereo cameras Ultrasound Local obstacle avoidance [Nieuwenhuisen et al., ECMR 2013] 31


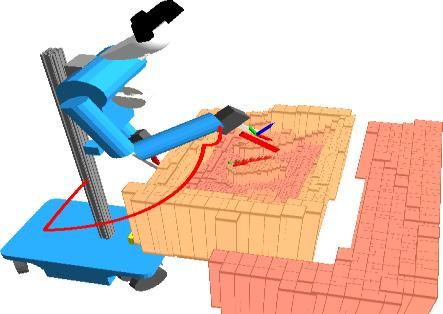
32 Exploration in Rough Terrain Wheeled robot with Intel 4th Core-i7 Quad Omnidirectional RGB-D sensor 3D laser scanner 32




33 3D Mapping and 6D Localization Efficient registration of Multiresolution surfel maps Global optimization 6D localization with 2D laser scan using particle filter [Schadler, Stückler, Behnke: accepted for SSRR 2013] 33

34 Conclusion Robot operation in complex environments is challenging Simple skills realized Autonomous control is limited Often perception is the problem 3D sensors are helpful Need for further research Possibilities with robots Multimodal sensor fusion Active perception Interactive perception 34
35 Thanks for your attention! Questions? 35
Semantic RGB-D Perception for Cognitive Robots
 Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments
 3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration
 Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration Sven Behnke Computer Science Institute VI Autonomous Intelligent
Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration Sven Behnke Computer Science Institute VI Autonomous Intelligent
Active Recognition and Manipulation of Simple Parts Exploiting 3D Information
 experiment ActReMa Active Recognition and Manipulation of Simple Parts Exploiting 3D Information Experiment Partners: Rheinische Friedrich-Wilhelms-Universität Bonn Metronom Automation GmbH Experiment
experiment ActReMa Active Recognition and Manipulation of Simple Parts Exploiting 3D Information Experiment Partners: Rheinische Friedrich-Wilhelms-Universität Bonn Metronom Automation GmbH Experiment
Learning Depth-Sensitive Conditional Random Fields for Semantic Segmentation of RGB-D Images
 Learning Depth-Sensitive Conditional Random Fields for Semantic Segmentation of RGB-D Images Andreas C. Müller and Sven Behnke Abstract We present a structured learning approach to semantic annotation
Learning Depth-Sensitive Conditional Random Fields for Semantic Segmentation of RGB-D Images Andreas C. Müller and Sven Behnke Abstract We present a structured learning approach to semantic annotation
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Semantic Mapping and Reasoning Approach for Mobile Robotics
 Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit
 3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Team Description Paper Team AutonOHM
 Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Object Classification in Domestic Environments
 Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
An Interactive Technique for Robot Control by Using Image Processing Method
 An Interactive Technique for Robot Control by Using Image Processing Method Mr. Raskar D. S 1., Prof. Mrs. Belagali P. P 2 1, E&TC Dept. Dr. JJMCOE., Jaysingpur. Maharashtra., India. 2 Associate Prof.
An Interactive Technique for Robot Control by Using Image Processing Method Mr. Raskar D. S 1., Prof. Mrs. Belagali P. P 2 1, E&TC Dept. Dr. JJMCOE., Jaysingpur. Maharashtra., India. 2 Associate Prof.
Rough Terrain 3D Mapping and Navigation using a Continuously Rotating 2D Laser Scanner
 German Journal on Artificial Intelligence (KI) 28(2):93-99 Ku nstliche Intelligenz manuscript No. (will be inserted by the editor) Rough Terrain 3D Mapping and Navigation using a Continuously Rotating
German Journal on Artificial Intelligence (KI) 28(2):93-99 Ku nstliche Intelligenz manuscript No. (will be inserted by the editor) Rough Terrain 3D Mapping and Navigation using a Continuously Rotating
Introduction to Autonomous Mobile Robots
 Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Learning to Interpret Pointing Gestures with a Time-of-Flight Camera
 Learning to Interpret Pointing Gestures with a Time-of-Flight Camera David Droeschel droeschel@ais.uni-bonn.de Jörg Stückler stueckler@ais.uni-bonn.de Sven Behnke behnke@cs.uni-bonn.de Autonomous Intelligent
Learning to Interpret Pointing Gestures with a Time-of-Flight Camera David Droeschel droeschel@ais.uni-bonn.de Jörg Stückler stueckler@ais.uni-bonn.de Sven Behnke behnke@cs.uni-bonn.de Autonomous Intelligent
Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks
 Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks Nico Höft, Hannes Schulz, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Institut für Informatik VI,
Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks Nico Höft, Hannes Schulz, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Institut für Informatik VI,
Multi-Resolution Surfel Mapping and Real-Time Pose Tracking using a Continuously Rotating 2D Laser Scanner
 In Proceedings of 11th IEEE International Symposium on Safety, Security, and Rescue Robotics \\\(SSRR\\\), Linköping, Sweden, October 13. Multi-Resolution Surfel Mapping and Real-Time Pose Tracking using
In Proceedings of 11th IEEE International Symposium on Safety, Security, and Rescue Robotics \\\(SSRR\\\), Linköping, Sweden, October 13. Multi-Resolution Surfel Mapping and Real-Time Pose Tracking using
Final Project Report: Mobile Pick and Place
 Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Removing Moving Objects from Point Cloud Scenes
 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
ZJUCyber Team Description for ROBOCUP 2013
 ZJUCyber Team Description for ROBOCUP 2013 Rong Xiong, Junnan Wang, Zenglin Hong, Qianshan Li, Penghui Yin, Yingying Xu, Xiaokai Sun, Longbin Shen, Yue Wang, Haoyuan Pang State Key Laboratory of Industrial
ZJUCyber Team Description for ROBOCUP 2013 Rong Xiong, Junnan Wang, Zenglin Hong, Qianshan Li, Penghui Yin, Yingying Xu, Xiaokai Sun, Longbin Shen, Yue Wang, Haoyuan Pang State Key Laboratory of Industrial
Towards Semantic Scene Analysis with Time-of-Flight Cameras
 Towards Semantic Scene Analysis with Time-of-Flight Cameras Dirk Holz 1, Ruwen Schnabel 2, David Droeschel 1, Jörg Stückler 1, and Sven Behnke 1 1 University of Bonn, Institute of Computer Science VI,
Towards Semantic Scene Analysis with Time-of-Flight Cameras Dirk Holz 1, Ruwen Schnabel 2, David Droeschel 1, Jörg Stückler 1, and Sven Behnke 1 1 University of Bonn, Institute of Computer Science VI,
3D Maps. Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring Bremen 1
 Towards Semantic 3D Maps Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Acknowledgements I would like to thank the following researchers for joint work and inspiration
Towards Semantic 3D Maps Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Acknowledgements I would like to thank the following researchers for joint work and inspiration
Scanning and Printing Objects in 3D Jürgen Sturm
 Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Humanoid Manipulation
 Humanoid Manipulation Tamim Asfour Institute for Anthropomatics, Computer Science Department, Humanoids and Intelligence Systems Lab (Prof. Dillmann) wwwiaim.ira.uka.de www.sfb588.uni-karlsruhe.de KIT
Humanoid Manipulation Tamim Asfour Institute for Anthropomatics, Computer Science Department, Humanoids and Intelligence Systems Lab (Prof. Dillmann) wwwiaim.ira.uka.de www.sfb588.uni-karlsruhe.de KIT
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Machine Learning for Medical Image Analysis. A. Criminisi
 Machine Learning for Medical Image Analysis A. Criminisi Overview Introduction to machine learning Decision forests Applications in medical image analysis Anatomy localization in CT Scans Spine Detection
Machine Learning for Medical Image Analysis A. Criminisi Overview Introduction to machine learning Decision forests Applications in medical image analysis Anatomy localization in CT Scans Spine Detection
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Autonomous Navigation of Nao using Kinect CS365 : Project Report
 Autonomous Navigation of Nao using Kinect CS365 : Project Report Samyak Daga Harshad Sawhney 11633 11297 samyakd@iitk.ac.in harshads@iitk.ac.in Dept. of CSE Dept. of CSE Indian Institute of Technology,
Autonomous Navigation of Nao using Kinect CS365 : Project Report Samyak Daga Harshad Sawhney 11633 11297 samyakd@iitk.ac.in harshads@iitk.ac.in Dept. of CSE Dept. of CSE Indian Institute of Technology,
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Real-Time Navigation in 3D Environments Based on Depth Camera Data
 Real-Time Navigation in 3D Environments Based on Depth Camera Data Daniel Maier Armin Hornung Maren Bennewitz Abstract In this paper, we present an integrated approach for robot localization, obstacle
Real-Time Navigation in 3D Environments Based on Depth Camera Data Daniel Maier Armin Hornung Maren Bennewitz Abstract In this paper, we present an integrated approach for robot localization, obstacle
Scanning and Printing Objects in 3D
 Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Registration of Non-Uniform Density 3D Point Clouds using Approximate Surface Reconstruction
 Registration of Non-Uniform Density 3D Point Clouds using Approximate Surface Reconstruction Dirk Holz and Sven Behnke Autonomous Intelligent Systems Group, University of Bonn, Germany Abstract 3D laser
Registration of Non-Uniform Density 3D Point Clouds using Approximate Surface Reconstruction Dirk Holz and Sven Behnke Autonomous Intelligent Systems Group, University of Bonn, Germany Abstract 3D laser
Robotics. Haslum COMP3620/6320
 Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
CONTENT ENGINEERING & VISION LABORATORY. Régis Vinciguerra
 CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
S7316: Real-Time Robotics Control and Simulation for Deformable Terrain Applications Using the GPU
 S7316: Real-Time Robotics Control and Simulation for Deformable Terrain Applications Using the GPU Daniel Melanz Copyright 2017 Energid Technology Overview 1. Who are we? 2. What do we do? 3. How do we
S7316: Real-Time Robotics Control and Simulation for Deformable Terrain Applications Using the GPU Daniel Melanz Copyright 2017 Energid Technology Overview 1. Who are we? 2. What do we do? 3. How do we
LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup
 FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
AASS, Örebro University
 Henrik Andreasson, Abdelbaki Bouguerra, Marcello Mobile Cirillo, Robotics Dimitar Dimitrov, and Olfaction Dimiter Driankov, Lab, Martin Magnusson, Federico Pecora, and Achim J. Lilienthal AASS, Örebro
Henrik Andreasson, Abdelbaki Bouguerra, Marcello Mobile Cirillo, Robotics Dimitar Dimitrov, and Olfaction Dimiter Driankov, Lab, Martin Magnusson, Federico Pecora, and Achim J. Lilienthal AASS, Örebro
Terrain Data Real-time Analysis Based on Point Cloud for Mars Rover
 Terrain Data Real-time Analysis Based on Point Cloud for Mars Rover Haoruo ZHANG 1, Yuanjie TAN, Qixin CAO. Abstract. With the development of space exploration, more and more aerospace researchers pay
Terrain Data Real-time Analysis Based on Point Cloud for Mars Rover Haoruo ZHANG 1, Yuanjie TAN, Qixin CAO. Abstract. With the development of space exploration, more and more aerospace researchers pay
HOG-Based Person Following and Autonomous Returning Using Generated Map by Mobile Robot Equipped with Camera and Laser Range Finder
 HOG-Based Person Following and Autonomous Returning Using Generated Map by Mobile Robot Equipped with Camera and Laser Range Finder Masashi Awai, Takahito Shimizu and Toru Kaneko Department of Mechanical
HOG-Based Person Following and Autonomous Returning Using Generated Map by Mobile Robot Equipped with Camera and Laser Range Finder Masashi Awai, Takahito Shimizu and Toru Kaneko Department of Mechanical
Robots Towards Making Sense of 3D Data
 Nico Blodow, Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RSS 2010 Workshop on Strategies and Evaluation for Mobile Manipulation
Nico Blodow, Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RSS 2010 Workshop on Strategies and Evaluation for Mobile Manipulation
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model
 Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model Ido Ofir Computer Science Department Stanford University December 17, 2011 Abstract This project
Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model Ido Ofir Computer Science Department Stanford University December 17, 2011 Abstract This project
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Small Object Manipulation in 3D Perception Robotic Systems Using Visual Servoing
 Small Object Manipulation in 3D Perception Robotic Systems Using Visual Servoing Camilo Perez Quintero, Oscar Ramirez, Mona Gridseth and Martin Jägersand* Abstract Robot manipulation has benefited from
Small Object Manipulation in 3D Perception Robotic Systems Using Visual Servoing Camilo Perez Quintero, Oscar Ramirez, Mona Gridseth and Martin Jägersand* Abstract Robot manipulation has benefited from
Indoor Home Furniture Detection with RGB-D Data for Service Robots
 Indoor Home Furniture Detection with RGB-D Data for Service Robots Oscar Alonso-Ramirez 1, Antonio Marin-Hernandez 1, Michel Devy 2 and Fernando M. Montes-Gonzalez 1. Abstract Home furniture detection
Indoor Home Furniture Detection with RGB-D Data for Service Robots Oscar Alonso-Ramirez 1, Antonio Marin-Hernandez 1, Michel Devy 2 and Fernando M. Montes-Gonzalez 1. Abstract Home furniture detection
Robust and Accurate Detection of Object Orientation and ID without Color Segmentation
 0 Robust and Accurate Detection of Object Orientation and ID without Color Segmentation Hironobu Fujiyoshi, Tomoyuki Nagahashi and Shoichi Shimizu Chubu University Japan Open Access Database www.i-techonline.com
0 Robust and Accurate Detection of Object Orientation and ID without Color Segmentation Hironobu Fujiyoshi, Tomoyuki Nagahashi and Shoichi Shimizu Chubu University Japan Open Access Database www.i-techonline.com
Multi-Modal Human- Computer Interaction
 Multi-Modal Human- Computer Interaction Attila Fazekas University of Debrecen, Hungary Road Map Multi-modal interactions and systems (main categories, examples, benefits) Face detection, facial gestures
Multi-Modal Human- Computer Interaction Attila Fazekas University of Debrecen, Hungary Road Map Multi-modal interactions and systems (main categories, examples, benefits) Face detection, facial gestures
CARE-O-BOT-RESEARCH: PROVIDING ROBUST ROBOTICS HARDWARE TO AN OPEN SOURCE COMMUNITY
 CARE-O-BOT-RESEARCH: PROVIDING ROBUST ROBOTICS HARDWARE TO AN OPEN SOURCE COMMUNITY Dipl.-Ing. Florian Weißhardt Fraunhofer Institute for Manufacturing Engineering and Automation IPA Outline Objective
CARE-O-BOT-RESEARCH: PROVIDING ROBUST ROBOTICS HARDWARE TO AN OPEN SOURCE COMMUNITY Dipl.-Ing. Florian Weißhardt Fraunhofer Institute for Manufacturing Engineering and Automation IPA Outline Objective
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots
 A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
Learning 6D Object Pose Estimation and Tracking
 Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Continuous Motion Planning for Domestic Service Robots with Multiresolution in Time
 DEPARTMENT OF COMPUTER SCIENCE VI AUTONOMOUS INTELLIGENT SYSTEMS UNIVERSITY OF BONN Master Thesis Continuous Motion Planning for Domestic Service Robots with Multiresolution in Time Ricarda Steffens Primary
DEPARTMENT OF COMPUTER SCIENCE VI AUTONOMOUS INTELLIGENT SYSTEMS UNIVERSITY OF BONN Master Thesis Continuous Motion Planning for Domestic Service Robots with Multiresolution in Time Ricarda Steffens Primary
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Automatic Generation of Indoor VR-Models by a Mobile Robot with a Laser Range Finder and a Color Camera
 Automatic Generation of Indoor VR-Models by a Mobile Robot with a Laser Range Finder and a Color Camera Christian Weiss and Andreas Zell Universität Tübingen, Wilhelm-Schickard-Institut für Informatik,
Automatic Generation of Indoor VR-Models by a Mobile Robot with a Laser Range Finder and a Color Camera Christian Weiss and Andreas Zell Universität Tübingen, Wilhelm-Schickard-Institut für Informatik,
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Generating Object Candidates from RGB-D Images and Point Clouds
 Generating Object Candidates from RGB-D Images and Point Clouds Helge Wrede 11.05.2017 1 / 36 Outline Introduction Methods Overview The Data RGB-D Images Point Clouds Microsoft Kinect Generating Object
Generating Object Candidates from RGB-D Images and Point Clouds Helge Wrede 11.05.2017 1 / 36 Outline Introduction Methods Overview The Data RGB-D Images Point Clouds Microsoft Kinect Generating Object
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras
 Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
INTELLIGENT AUTONOMOUS SYSTEMS LAB
 Matteo Munaro 1,3, Alex Horn 2, Randy Illum 2, Jeff Burke 2, and Radu Bogdan Rusu 3 1 IAS-Lab at Department of Information Engineering, University of Padova 2 Center for Research in Engineering, Media
Matteo Munaro 1,3, Alex Horn 2, Randy Illum 2, Jeff Burke 2, and Radu Bogdan Rusu 3 1 IAS-Lab at Department of Information Engineering, University of Padova 2 Center for Research in Engineering, Media
ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design
 ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design Emanuele Ruffaldi (SSSA) I. Kostavelis, D. Giakoumis, D. Tzovaras (CERTH) Overview Problem Statement Existing Solutions
ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design Emanuele Ruffaldi (SSSA) I. Kostavelis, D. Giakoumis, D. Tzovaras (CERTH) Overview Problem Statement Existing Solutions
Semantic Labeling of 3D Point Clouds with Object Affordance for Robot Manipulation
 Semantic Labeling of 3D Point Clouds with Object Affordance for Robot Manipulation David Inkyu Kim Gaurav S. Sukhatme Abstract When a robot is deployed it needs to understand the nature of its surroundings.
Semantic Labeling of 3D Point Clouds with Object Affordance for Robot Manipulation David Inkyu Kim Gaurav S. Sukhatme Abstract When a robot is deployed it needs to understand the nature of its surroundings.
Kinect Device. How the Kinect Works. Kinect Device. What the Kinect does 4/27/16. Subhransu Maji Slides credit: Derek Hoiem, University of Illinois
 4/27/16 Kinect Device How the Kinect Works T2 Subhransu Maji Slides credit: Derek Hoiem, University of Illinois Photo frame-grabbed from: http://www.blisteredthumbs.net/2010/11/dance-central-angry-review
4/27/16 Kinect Device How the Kinect Works T2 Subhransu Maji Slides credit: Derek Hoiem, University of Illinois Photo frame-grabbed from: http://www.blisteredthumbs.net/2010/11/dance-central-angry-review
Local Multi-Resolution Surfel Grids for MAV Motion Estimation and 3D Mapping
 Local Multi-Resolution Surfel Grids for MAV Motion Estimation and 3D Mapping David Droeschel, Jörg Stückler, and Sven Behnke Computer Science Institute VI, University of Bonn, 53113 Bonn, Germany, droeschel@ais.uni-bonn.de,
Local Multi-Resolution Surfel Grids for MAV Motion Estimation and 3D Mapping David Droeschel, Jörg Stückler, and Sven Behnke Computer Science Institute VI, University of Bonn, 53113 Bonn, Germany, droeschel@ais.uni-bonn.de,
AN EFFICIENT METHOD FOR HUMAN POINTING ESTIMATION FOR ROBOT INTERACTION. Satoshi Ueno, Sei Naito, and Tsuhan Chen
 AN EFFICIENT METHOD FOR HUMAN POINTING ESTIMATION FOR ROBOT INTERACTION Satoshi Ueno, Sei Naito, and Tsuhan Chen KDDI R&D Laboratories, Inc. Cornell University ABSTRACT In this paper, we propose an efficient
AN EFFICIENT METHOD FOR HUMAN POINTING ESTIMATION FOR ROBOT INTERACTION Satoshi Ueno, Sei Naito, and Tsuhan Chen KDDI R&D Laboratories, Inc. Cornell University ABSTRACT In this paper, we propose an efficient
Using 3D Laser Range Data for SLAM in Outdoor Environments
 Using 3D Laser Range Data for SLAM in Outdoor Environments Christian Brenneke, Oliver Wulf, Bernardo Wagner Institute for Systems Engineering, University of Hannover, Germany [brenneke, wulf, wagner]@rts.uni-hannover.de
Using 3D Laser Range Data for SLAM in Outdoor Environments Christian Brenneke, Oliver Wulf, Bernardo Wagner Institute for Systems Engineering, University of Hannover, Germany [brenneke, wulf, wagner]@rts.uni-hannover.de
Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage Dr. Jürgen Sturm Agenda for Today Exploration with a single robot Coordinated
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage Dr. Jürgen Sturm Agenda for Today Exploration with a single robot Coordinated
ToBI - Team of Bielefeld: The Human-Robot Interaction System for 2013
 ToBI - Team of Bielefeld: The Human-Robot Interaction System for RoboCup@Home 2013 Leon Ziegler, Jens Wittrowski, Matthias Schöpfer, Frederic Siepmann, Sven Wachsmuth Faculty of Technology, Bielefeld University,
ToBI - Team of Bielefeld: The Human-Robot Interaction System for RoboCup@Home 2013 Leon Ziegler, Jens Wittrowski, Matthias Schöpfer, Frederic Siepmann, Sven Wachsmuth Faculty of Technology, Bielefeld University,
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS. Oliver Wulf, Bernardo Wagner
 USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
Grasping Known Objects with Aldebaran Nao
 CS365 Project Report Grasping Known Objects with Aldebaran Nao By: Ashu Gupta( ashug@iitk.ac.in) Mohd. Dawood( mdawood@iitk.ac.in) Department of Computer Science and Engineering IIT Kanpur Mentor: Prof.
CS365 Project Report Grasping Known Objects with Aldebaran Nao By: Ashu Gupta( ashug@iitk.ac.in) Mohd. Dawood( mdawood@iitk.ac.in) Department of Computer Science and Engineering IIT Kanpur Mentor: Prof.
LEARNING NAVIGATION MAPS BY LOOKING AT PEOPLE
 LEARNING NAVIGATION MAPS BY LOOKING AT PEOPLE Roger Freitas,1 José Santos-Victor Mário Sarcinelli-Filho Teodiano Bastos-Filho Departamento de Engenharia Elétrica, Universidade Federal do Espírito Santo,
LEARNING NAVIGATION MAPS BY LOOKING AT PEOPLE Roger Freitas,1 José Santos-Victor Mário Sarcinelli-Filho Teodiano Bastos-Filho Departamento de Engenharia Elétrica, Universidade Federal do Espírito Santo,
Ceilbot vision and mapping system
 Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Utilizing the Structure of Field Lines for Efficient Soccer Robot Localization
 Utilizing the Structure of Field Lines for Efficient Soccer Robot Localization Hannes Schulz, Weichao Liu, Jörg Stückler, Sven Behnke University of Bonn, Institute for Computer Science VI, Autonomous Intelligent
Utilizing the Structure of Field Lines for Efficient Soccer Robot Localization Hannes Schulz, Weichao Liu, Jörg Stückler, Sven Behnke University of Bonn, Institute for Computer Science VI, Autonomous Intelligent
Aerial and Ground-based Collaborative Mapping: An Experimental Study
 Aerial and Ground-based Collaborative Mapping: An Experimental Study Ji Zhang and Sanjiv Singh Abstract We here present studies to enable aerial and ground-based collaborative mapping in GPS-denied environments.
Aerial and Ground-based Collaborative Mapping: An Experimental Study Ji Zhang and Sanjiv Singh Abstract We here present studies to enable aerial and ground-based collaborative mapping in GPS-denied environments.
Lecture: Autonomous micro aerial vehicles
 Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
AAM Based Facial Feature Tracking with Kinect
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking
LASERDATA LIS build your own bundle! LIS Pro 3D LIS 3.0 NEW! BETA AVAILABLE! LIS Road Modeller. LIS Orientation. LIS Geology.
 LIS 3.0...build your own bundle! NEW! LIS Geology LIS Terrain Analysis LIS Forestry LIS Orientation BETA AVAILABLE! LIS Road Modeller LIS Editor LIS City Modeller colors visualization I / O tools arithmetic
LIS 3.0...build your own bundle! NEW! LIS Geology LIS Terrain Analysis LIS Forestry LIS Orientation BETA AVAILABLE! LIS Road Modeller LIS Editor LIS City Modeller colors visualization I / O tools arithmetic
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Autonomous navigation in industrial cluttered environments using embedded stereo-vision
 Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Organized Segmenta.on
 Organized Segmenta.on Alex Trevor, Georgia Ins.tute of Technology PCL TUTORIAL @ICRA 13 Overview Mo.va.on Connected Component Algorithm Planar Segmenta.on & Refinement Euclidean Clustering Timing Results
Organized Segmenta.on Alex Trevor, Georgia Ins.tute of Technology PCL TUTORIAL @ICRA 13 Overview Mo.va.on Connected Component Algorithm Planar Segmenta.on & Refinement Euclidean Clustering Timing Results
Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot
 Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot Yoichi Nakaguro Sirindhorn International Institute of Technology, Thammasat University P.O. Box 22, Thammasat-Rangsit Post Office,
Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot Yoichi Nakaguro Sirindhorn International Institute of Technology, Thammasat University P.O. Box 22, Thammasat-Rangsit Post Office,
3D Point Cloud Segmentation Using a Fully Connected Conditional Random Field
 07 5th European Signal Processing Conference (EUSIPCO) 3D Point Cloud Segmentation Using a Fully Connected Conditional Random Field Xiao Lin Josep R.Casas Montse Pardás Abstract Traditional image segmentation
07 5th European Signal Processing Conference (EUSIPCO) 3D Point Cloud Segmentation Using a Fully Connected Conditional Random Field Xiao Lin Josep R.Casas Montse Pardás Abstract Traditional image segmentation
BendIT An Interactive Game with two Robots
 BendIT An Interactive Game with two Robots Tim Niemueller, Stefan Schiffer, Albert Helligrath, Safoura Rezapour Lakani, and Gerhard Lakemeyer Knowledge-based Systems Group RWTH Aachen University, Aachen,
BendIT An Interactive Game with two Robots Tim Niemueller, Stefan Schiffer, Albert Helligrath, Safoura Rezapour Lakani, and Gerhard Lakemeyer Knowledge-based Systems Group RWTH Aachen University, Aachen,
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
ToF Camera for high resolution 3D images with affordable pricing
 ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Building Reliable 2D Maps from 3D Features
 Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Deliverable D6.1 CENTAURO Manipulation Concept
 Ref. Ares(2015)4031830-30/09/2015 The EU Framework Programme for Research and Innovation H2020 Research and Innovation Action Deliverable D6.1 CENTAURO Manipulation Concept Dissemination Level: Public
Ref. Ares(2015)4031830-30/09/2015 The EU Framework Programme for Research and Innovation H2020 Research and Innovation Action Deliverable D6.1 CENTAURO Manipulation Concept Dissemination Level: Public
High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images
 MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
Model-based Visual Tracking:
 Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural