10 Years of Implied Metrology. Stewart Cannon 4D Nav
|
|
|
- Joy Chase
- 5 years ago
- Views:
Transcription

1 10 Years of Implied Metrology Stewart Cannon 4D Nav

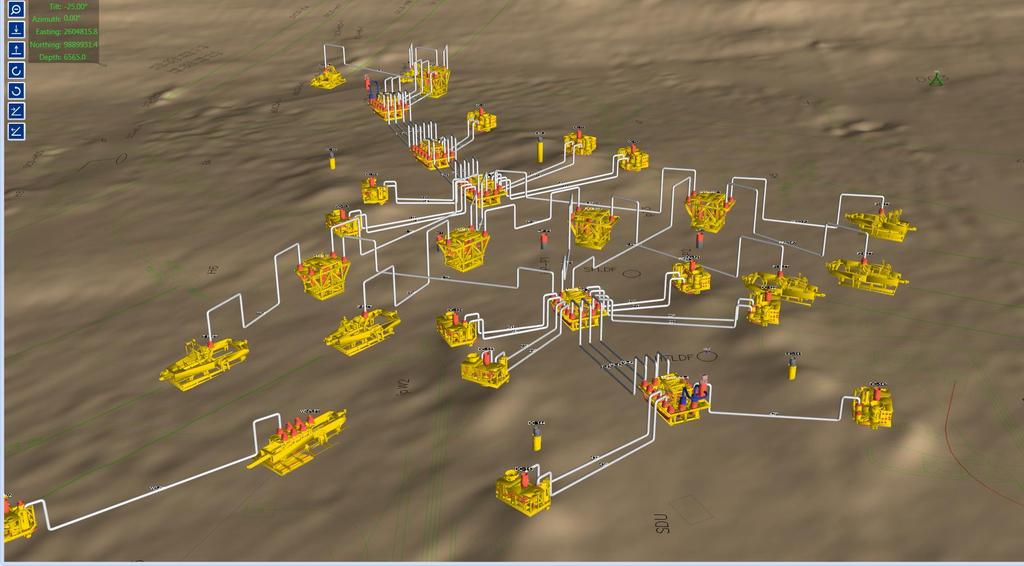
2 Green Canyon Area of Gulf of Mexico 150 miles south of New Orleans First oil 2007 Oil and Gas exported via Caesar and Cleopatra pipeline systems
3 Two producing drill centers, DC1 & DC3. Production and Quarters (PQ) platform 2 miles south of DC1 Water depth ranges from 1600m at DC3 to 2100m at the PQ. PQ processes 200,000 barrels/day
4 DC 1
5 DC1-5 manifolds, 5 PLEMs and 11 trees all installed on 36 inch foundation piles. 300m along its north south axis Permanently installed tripods for LBL positioning
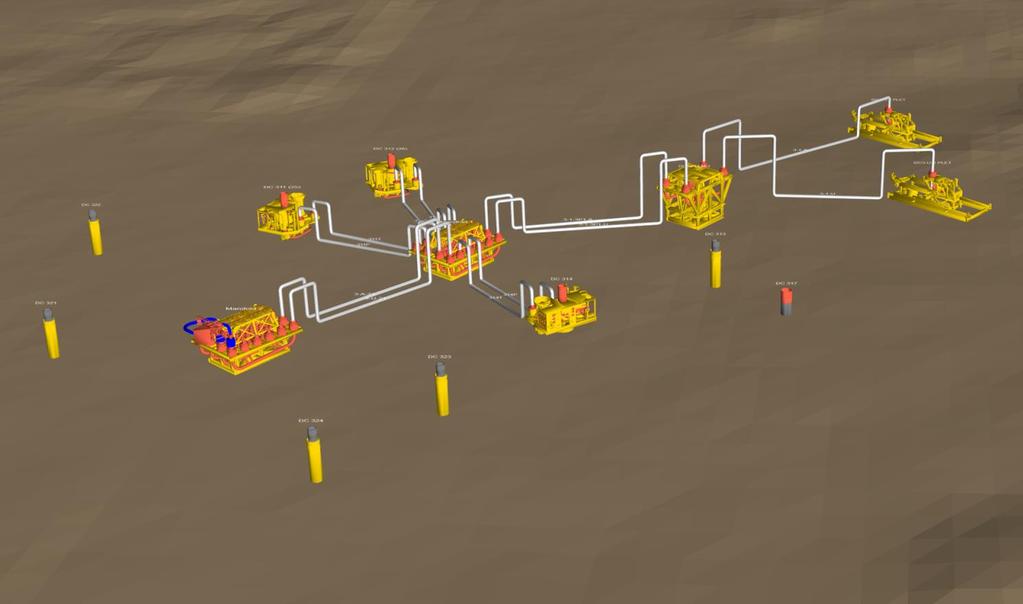
6 DC 3
7 DC3-2 manifolds, 1 PLEM and 3 trees, also installed on foundation piles Permanently installed tripods for LBL positioning at each drill centre 4 additional wells planned
8 Pre-Fabricated Jumper Metrology 8

9 Pre-Fabricated Jumper Metrology 9
10 Pre-Fabricated Jumper Metrology 10


11 Pre-Fabricated Jumper Metrology - Offshore X,Y,Z Pitch Roll Heading 11


12 . Pre-Fabricated Jumper Metrology fabrication yard Perform dimensional control survey of structure to be landed on the foundation pile. Determine XYZ coordinates of jumper hubs, hub pitch and hub roll relative to the point where the structure interfaces with the subsea pile Additional receptacles installed on the structure provide additional datum points when structures are installed subsea. 12

13 Pre-Fabricated Jumper Metrology Install Structure Metrology Issue Metrology Drawings Isometric Drawings 3 to 4 weeks from metrology to jumper load out Critical path to well start up Fabrication Pressure Test Load Out & Transport to Field Install Jumper Well Start Up 13

14 Pre-Fabricated Jumper Metrology Install Structure Install Jumper Issue Metrology Drawings Well Start Up Perform metrology to subsea foundation piles Isometric Drawings Fabrication 1 st Oil accelerated 4 weeks Pressure Test Load Out & Transport to Field Install Jumper 14
15 Metrology calculator software developed to allow data to be viewed and analyzed plus provide an input to real-time software Dimensional Control Data RigNav Baselines Depth Loops Inclinations Gyro Data Metrology Calculator Forensic Analysis Quality Control



16 Data Model Piles and Tripods Model includes piles, tripods, structures, metrology tools and hubs/receptacles Piles and Wellheads are fixed to the seabed and may be keyed Tripods may have different positions at different times to accommodate movement



17 Data Model Structures and Hubs Structures sit on piles or mudmats, may be keyed or able to rotate and have hubs and receptacles Hubs and receptacles are defined by coordinates and attitudes in a structure based system Metrology tools sit on piles or hubs and have receptacles

18 Data Model Jumpers Jumpers connect one hub to another Coordinates and attitude of both hubs computed Implied metrology developed from the hub-to-hub relationship Vertical profile of jumper added for 3D viewing and clearance calculations

19 Data Model: Observations Observations include baselines, attitudes, gyro headings and depth loops Observations are grouped into data sets and campaigns Observed data imported into MC to eliminate transcription errors Observations collected over 10 years

20 Metrology Some Initial As DC Tripods piles 1 was spaced calibration pile-to-wellhead set and much Calculator wellheads about form better was 250m a near-field was done for baselines were and implied subsequently with installed DC array Mk were 3 metrology about 4 and baselines Compatts collected used 500m an initial to the were with perform but and calibration longer not WF 8 collected tripods used and a distances complete adjusted in was at to the each tripods performed initial make adjustment using site a adjustment scale sound with no the factor velocity scale existing factor the well dominant using set at all the error fiduciary baselines source point



21 Network Reduced Depth Paroscientific Initially loops used adjustment by pro-rating measured Pressure pressure solution Sensor the sensor between misclosure on based used piles Compatts to on by measure land the for techniques amount Depths depth of loops but time used not spent reliable on enough a segment of a loop to correct for tide



22 Heading Observations Metrology Gyro Piles and were or Inclinometer wellhead was keyed tools measured were used and heading collected Compatt wellheads for on mechanical and slotted on data attitude different were piles collected interface not determination quadrants so trees between each had and pile to required Compatt reduced be or landed wellhead to to stab compute with attitude and a top and heading of precise real-world pile tolerance of wellhead coordinates the pile and offsets hubs between and receptacles the stab and inclinometer

23 Heading Calculation Heading measured in multiple quadrants C-O of slots measured with DC survey Meridian Convergence computed and applied All heading observations reduced to one quadrant and averaged Also possible to compute headings with observations to at least two receptacles or hubs on a structure

24 Dimensional Control Locations and attitudes of hubs and receptacles surveyed into a structure-oriented coordinate system for structures and metrology brackets Orientation of key surveyed precisely

25 Dimensional Control Coordinates entered into MC.dwg outline of structure and 3D model also entered Report and page number referenced in MC for easy access

26 Implied Metrology Given position and attitude of two hubs we can determine the metrology between them In the case of trees the wellheads were not slotted so they had to be placed within a couple of degrees of planned heading Jumpers were prefabricated

27 A Most Issues Multi-path Checks Baselines total measurements with of around were from initial observation the generally measuring manifold network were observed campaigns headings baselines were made between were with required through as Mk conducted infrastructure hubs 5 collection structures Compatts to confirm DC1 of was and baselines 3 over implied observed installed 97 years and or with adjustments and if metrology network high it each became residuals campaign solution prior were evident were to done jumper for typically seen heading that without installation during the having and tripods a a scale position measurement multiple should factor baseline have check campaign been gyro data higher observations sets

28 Compatt Transducer to Receptacle Reduction The position of interest is the receptacle and not the transducer The Compatt may be mounted on a metrology bracket due to accessibility issues These calculations were added as part of the network adjustment

29 Horizontal Network Adjustment Network adjustments were performed using all available data to QC results Incorporates all dimensional control and holds lever arms fixed Network adjustment considered all baselines and headings Used tripod model that allowed for tripod movement through time Combined solution for position and heading of structures Cascaded calculation technique was developed that feeds output from attitude calculations to depth network calculation to network adjustment
30 FREQUENCY Baseline Measurements 1028 Baselines Weighted by standard deviation which combined detection accuracy and sound velocity accuracy All residuals for baselines less than 30m were less that 2cm Baselines (cm) More BIN Frequency
31 FREQUENCY Gyro Measurements 67 heading measurements in slotted piles and receptacles 10 9 Heading Residuals 9 9 Heading was computed by a weighted combination or baselines and gyro measurements Larger spread than anticipated indicates accuracy expectations not met Analysis showed this to be due to a combination of mechanical and procedural issues BIN Frequency

32 Vertical Network Adjustment Used least squares techniques developed for land differential level networks Provides redundancy and an indication of accuracy via residuals Observations were the differential depth between two points after misclosure was distributed All depth loop segments used the same weighting
33 FREQUENCY Depth Loop Measurements 611 Depth Loop segments Most residuals within 2cm There were some cases of depth loops between the same two points measured at different times having a difference of 15cm Could have been caused by pile settlement Depth Loops (cm) More Frequency BIN

34 Forensic Metrology Headings of four structures measured by gyro were determined to be in error by over two degrees by using baselines to compute independent headings A tripod was suspected of moving several times due to high baseline residuals. Analysis determined it was a combination of one movement and multipath. Initial observations used a scale factor and subsequent data sets didn t. With the site at the border of UTM zone there was a noticeable difference in the tripod coordinates. Sound velocity issues were noted in some data sets when a velocimeter was used instead of a CTD
35 RigNav: Real-time Application for Rig Safety The positions, headings and attitudes derived from the metrology are used to generate 3D scenes describing the fields in detail Used by Drilling group to monitor spatial relations between BOP and the infrastructure DROP model used to predict landing spot for dropped objects Metrology Calculator Positions, attitudes and headings 3D Models RigNav realtime software

36 RigNav: Vertical Clearance Planning

37 RigNav: Vertical Clearance Monitoring


38 Commercialization of Technology Metrology Calculator developed into a commercial joboriented software package called Connect in partnership with Sonardyne Planning tools to generate steps for metrology process In addition to calculations collects all data in real-time
Deepwater Spoolpiece Metrology and INS
 Deepwater Spoolpiece Metrology and INS ir. Wilbert Brink AVANS Hogeschool - 16 June 2009 Introduction What is a deepwater spoolpiece metrology? What is the classical way of doing a metrology? How can we
Deepwater Spoolpiece Metrology and INS ir. Wilbert Brink AVANS Hogeschool - 16 June 2009 Introduction What is a deepwater spoolpiece metrology? What is the classical way of doing a metrology? How can we
Transducer and LBL calibration - Integrated functions in HiPAP systems
 Transducer and LBL calibration - Integrated functions in HiPAP systems Dynamic Positioning Conference, Houston, September 17-18 2002 arranged by 1 Calibration of transducer alignment and of LBL array This
Transducer and LBL calibration - Integrated functions in HiPAP systems Dynamic Positioning Conference, Houston, September 17-18 2002 arranged by 1 Calibration of transducer alignment and of LBL array This
The Use of Sonardyne SPRINT INS, Syrinx DVL & 6G Acoustics to Enable Dynamic Laser Mapping and Metrology
 The Use of Sonardyne SPRINT INS, Syrinx DVL & 6G Acoustics to Enable Dynamic Laser Mapping and Metrology Simon Waterfield Survey Support Group Manager, Sonardyne International Ltd. Agenda Key enablers
The Use of Sonardyne SPRINT INS, Syrinx DVL & 6G Acoustics to Enable Dynamic Laser Mapping and Metrology Simon Waterfield Survey Support Group Manager, Sonardyne International Ltd. Agenda Key enablers
Quality Control with 4D Nav s QCView Software. Rig Move QA/QC Operations Using QCView. Case Study 1: Drillship Rig Move
 Quality Control with 4D Nav s QCView Software 4D Nav has introduced a software package designed to provide advanced QC capabilities for offshore operations. This paper describes some of the capabilities
Quality Control with 4D Nav s QCView Software 4D Nav has introduced a software package designed to provide advanced QC capabilities for offshore operations. This paper describes some of the capabilities
Using Close Range Photogrammetry to meet Offshore Platform Construction and Installation Requirements
 Using Close Range Photogrammetry to meet Offshore Platform Construction and Installation Requirements Simon Manser, BP Exploration for Hydro14 Clair Phase II Project - Clair Ridge UKCS West of Shetland
Using Close Range Photogrammetry to meet Offshore Platform Construction and Installation Requirements Simon Manser, BP Exploration for Hydro14 Clair Phase II Project - Clair Ridge UKCS West of Shetland
INS aided subsurface positioning for ROV surveys
 INS aided subsurface positioning for ROV surveys M. van de Munt, Allseas Engineering B.V., The Netherlands R van der Velden, Allseas Engineering B.V., The Netherlands K. Epke, Allseas Engineering B.V.,
INS aided subsurface positioning for ROV surveys M. van de Munt, Allseas Engineering B.V., The Netherlands R van der Velden, Allseas Engineering B.V., The Netherlands K. Epke, Allseas Engineering B.V.,
DYNAMIC POSITIONING CONFERENCE September 16-17, Sensors
 DYNAMIC POSITIONING CONFERENCE September 16-17, 2003 Sensors An Integrated acoustic positioning and inertial navigation system Jan Erik Faugstadmo, Hans Petter Jacobsen Kongsberg Simrad, Norway Revisions
DYNAMIC POSITIONING CONFERENCE September 16-17, 2003 Sensors An Integrated acoustic positioning and inertial navigation system Jan Erik Faugstadmo, Hans Petter Jacobsen Kongsberg Simrad, Norway Revisions
Improved Operational Efficiency Through 3D Laser Scanning Techniques. Presented by Grace Chia, Sales Engineer, Seatronics
 Improved Operational Efficiency Through 3D Laser Scanning Techniques Presented by Grace Chia, Sales Engineer, Seatronics About Us SEATRONICS The Marine Technology Specialists; Market leaders in provision
Improved Operational Efficiency Through 3D Laser Scanning Techniques Presented by Grace Chia, Sales Engineer, Seatronics About Us SEATRONICS The Marine Technology Specialists; Market leaders in provision
Patch Test & Stability Check Report
 Patch Test & Stability Check Report Storebælt, 2009 SB Cable Project CT Offshore Final Report November, 2009 SB Cable Project November 2009 8-10 Teglbaekvej DK-8361 Hasselager Aarhus, Denmark Tel: +45
Patch Test & Stability Check Report Storebælt, 2009 SB Cable Project CT Offshore Final Report November, 2009 SB Cable Project November 2009 8-10 Teglbaekvej DK-8361 Hasselager Aarhus, Denmark Tel: +45
New underwater contactless metrology and inspection approach using photogrammetric integrated system
 New underwater contactless metrology and inspection approach using photogrammetric integrated system The leading Edge of Value-Based Subsea Inspection, SUT, Aberdeen, 1 st November 2017 1 ORUS 3D SYSTEM
New underwater contactless metrology and inspection approach using photogrammetric integrated system The leading Edge of Value-Based Subsea Inspection, SUT, Aberdeen, 1 st November 2017 1 ORUS 3D SYSTEM
DEVICE CONFIGURATION INSTRUCTIONS. WinFrog Device Group:
 WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: ROV Olympian T2
WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: ROV Olympian T2
RAILWAY PROJECT Geodetic Reference System, Geodetic Control Network and Rail Construction Measurements
 RAILWAY PROJECT Geodetic Reference System, Geodetic Control Network and Rail Construction Measurements Railway Project 2 / 8 INDEX 1 Introduction... 3 2 Reference System... 3 2.1 Reference system... 3
RAILWAY PROJECT Geodetic Reference System, Geodetic Control Network and Rail Construction Measurements Railway Project 2 / 8 INDEX 1 Introduction... 3 2 Reference System... 3 2.1 Reference system... 3
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Product information. Hi-Tech Electronics Pte Ltd
 Product information Introduction TEMA Motion is the world leading software for advanced motion analysis. Starting with digital image sequences the operator uses TEMA Motion to track objects in images,
Product information Introduction TEMA Motion is the world leading software for advanced motion analysis. Starting with digital image sequences the operator uses TEMA Motion to track objects in images,
TAKING LIDAR SUBSEA. Adam Lowry, Nov 2016
 TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
Compatt 5 Transponder
 SONARDYNE NAVIG VIGATION SYSTEMS Compatt 5 Transponder The world s most capable acoustic navigation transponder Designed for 1 Compatt 5 Compatt, the Computing and telemetry transponder, has been the market-leader
SONARDYNE NAVIG VIGATION SYSTEMS Compatt 5 Transponder The world s most capable acoustic navigation transponder Designed for 1 Compatt 5 Compatt, the Computing and telemetry transponder, has been the market-leader
US foundry Bradken implements optical measuring technology
 Application Note US foundry Bradken implements optical measuring technology Location / country: Tacoma / Washington, USA GOM systems: ATOS Triple Scan, TRITOP GOM software: ATOS Professional Sector: Power
Application Note US foundry Bradken implements optical measuring technology Location / country: Tacoma / Washington, USA GOM systems: ATOS Triple Scan, TRITOP GOM software: ATOS Professional Sector: Power
Navigational Aids 1 st Semester/2007/TF 7:30 PM -9:00 PM
 Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
Technical English -I 5 th week SURVEYING AND MAPPING
 Technical English -I 5 th week SURVEYING AND MAPPING What is surveying? It is the art of defining the positions of natural and man-made made features on the Earth s surface. Basic Tasks and Features in
Technical English -I 5 th week SURVEYING AND MAPPING What is surveying? It is the art of defining the positions of natural and man-made made features on the Earth s surface. Basic Tasks and Features in
Teledyne PDS. Trailing Suction Hopper. Version April Teledyne RESON B.V. Stuttgartstraat AS Rotterdam The Netherlands
 Trailing Suction Hopper Teledyne PDS Version 1.1.0 April 2017 Teledyne RESON B.V. Stuttgartstraat 42-44 3047 AS Rotterdam The Netherlands Tel.: +31 (0)10 245 15 00 www.teledyne-reson.com Teledyne RESON
Trailing Suction Hopper Teledyne PDS Version 1.1.0 April 2017 Teledyne RESON B.V. Stuttgartstraat 42-44 3047 AS Rotterdam The Netherlands Tel.: +31 (0)10 245 15 00 www.teledyne-reson.com Teledyne RESON
ENERGY WISE WORKSHOP 2003
 ENERGY WISE WORKSHOP 2003 TECHNOLOGY OPTIONS FOR DEEPWATER BRAZIL Small Bore Drilling Risers Offer Reduction in Drilling Costs By E. Lustosa, S. Hatton, D. Walters 2H Offshore Background Drilling costs
ENERGY WISE WORKSHOP 2003 TECHNOLOGY OPTIONS FOR DEEPWATER BRAZIL Small Bore Drilling Risers Offer Reduction in Drilling Costs By E. Lustosa, S. Hatton, D. Walters 2H Offshore Background Drilling costs
Real time 3D display of hydrographic data for QA and QC.
 Real time 3D display of hydrographic data for QA and QC. Roland Arsenault Center for Coastal and Ocean Mapping & Joint Hydrographic Center University of New Hampshire roland@ccom.unh.edu Figure 1 Data
Real time 3D display of hydrographic data for QA and QC. Roland Arsenault Center for Coastal and Ocean Mapping & Joint Hydrographic Center University of New Hampshire roland@ccom.unh.edu Figure 1 Data
AC-43 Accelerometer. User Manual
 AC-43 Accelerometer Manual Page 1 AC-43 Accelerometer User Manual Company: Author: Checked: Approved: Distribution: GeoSIG Ltd Wiesenstrasse 39, 8952 Schlieren, Switzerland, Tel: +41 44 810 21 50, Fax:
AC-43 Accelerometer Manual Page 1 AC-43 Accelerometer User Manual Company: Author: Checked: Approved: Distribution: GeoSIG Ltd Wiesenstrasse 39, 8952 Schlieren, Switzerland, Tel: +41 44 810 21 50, Fax:
1.1.1 Orientation Coordinate Systems
 1.1.1 Orientation 1.1.1.1 Coordinate Systems The velocity measurement is a vector in the direction of the transducer beam, which we refer to as beam coordinates. Beam coordinates can be converted to a
1.1.1 Orientation 1.1.1.1 Coordinate Systems The velocity measurement is a vector in the direction of the transducer beam, which we refer to as beam coordinates. Beam coordinates can be converted to a
Checking the values using backscatter data
 A Technique for using Backscatter Imagery to Calibrate your Multibeam sonar Harold Orlinsky Harold@Hypack.com Checking the values using backscatter data The collection of Backscatter is co located with
A Technique for using Backscatter Imagery to Calibrate your Multibeam sonar Harold Orlinsky Harold@Hypack.com Checking the values using backscatter data The collection of Backscatter is co located with
MATH 1112 Trigonometry Final Exam Review
 MATH 1112 Trigonometry Final Exam Review 1. Convert 105 to exact radian measure. 2. Convert 2 to radian measure to the nearest hundredth of a radian. 3. Find the length of the arc that subtends an central
MATH 1112 Trigonometry Final Exam Review 1. Convert 105 to exact radian measure. 2. Convert 2 to radian measure to the nearest hundredth of a radian. 3. Find the length of the arc that subtends an central
GEOACOUSTICS GEOSWATH PLUS DATA PROCESSING WITH CARIS HIPS 8.1
 GEOACOUSTICS GEOSWATH PLUS DATA PROCESSING WITH CARIS HIPS 8.1 IN SUPPORT OF SANDY SUPPLEMENTAL RESEARCH Val Schmidt and Kevin Jerram University of New Hampshire Center for Coastal and Ocean Mapping Sunken
GEOACOUSTICS GEOSWATH PLUS DATA PROCESSING WITH CARIS HIPS 8.1 IN SUPPORT OF SANDY SUPPLEMENTAL RESEARCH Val Schmidt and Kevin Jerram University of New Hampshire Center for Coastal and Ocean Mapping Sunken
InteLAS Family of Mobile LiDAR Systems
 InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
USER MANUAL. Specifications. 0.1 m/s for wind speed degrees for wind direction -30 C to +80 C for temperature
 USER MANUAL Overview The TriSonica Mini is a lightweight three-dimensional airflow sensor in a small package, ideal for both fixed and moveable applications. TriSonica Mini uses the properties of sound
USER MANUAL Overview The TriSonica Mini is a lightweight three-dimensional airflow sensor in a small package, ideal for both fixed and moveable applications. TriSonica Mini uses the properties of sound
Making the Most of Borehole Surveying
 Making the Most of Borehole Surveying Prof Angus Jamieson University of the Highlands and Islands Video presentation available at www.uhi.ac.uk/surveying-summary This Presentation Covers... 1. Why survey
Making the Most of Borehole Surveying Prof Angus Jamieson University of the Highlands and Islands Video presentation available at www.uhi.ac.uk/surveying-summary This Presentation Covers... 1. Why survey
Evaluating the Performance of a Vehicle Pose Measurement System
 Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
Seismic Time Processing. The Basis for Modern Seismic Exploration
 The Future of E&P Seismic Time Processing The Basis for Modern Seismic Exploration Fusion is a leading provider of Seismic Processing for the oil and gas industry from field tapes through final migration.
The Future of E&P Seismic Time Processing The Basis for Modern Seismic Exploration Fusion is a leading provider of Seismic Processing for the oil and gas industry from field tapes through final migration.
Third Rock from the Sun
 Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE. For all mobile surveying applications
 Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
Improved Operational Efficiency with Laser Scanning Scott Gray, Operations Manager, Seatronics Ltd.
 Improved Operational Efficiency with Laser Scanning Scott Gray, Operations Manager, Seatronics Ltd. Overview ULS Underwater Laser Systems Trade-offs with Sonar and laser System Operation Results Preview
Improved Operational Efficiency with Laser Scanning Scott Gray, Operations Manager, Seatronics Ltd. Overview ULS Underwater Laser Systems Trade-offs with Sonar and laser System Operation Results Preview
Introduction.
 Product information Image Systems AB Main office: Ågatan 40, SE-582 22 Linköping Phone +46 13 200 100, fax +46 13 200 150 info@imagesystems.se, Introduction Motion is the world leading software for advanced
Product information Image Systems AB Main office: Ågatan 40, SE-582 22 Linköping Phone +46 13 200 100, fax +46 13 200 150 info@imagesystems.se, Introduction Motion is the world leading software for advanced
Liebherr-Aerospace: Optical Metrology from GOM Accelerates Certification Tests for New Landing Gears
 Application Note Liebherr-Aerospace: Optical Metrology from GOM Accelerates Certification Tests for New Landing Gears Location/Country: Lindenberg, Deutschland GOM system: ARAMIS GOM software: ARAMIS Professional
Application Note Liebherr-Aerospace: Optical Metrology from GOM Accelerates Certification Tests for New Landing Gears Location/Country: Lindenberg, Deutschland GOM system: ARAMIS GOM software: ARAMIS Professional
navigation Isaac Skog
 Foot-mounted zerovelocity aided inertial navigation Isaac Skog skog@kth.se Course Outline 1. Foot-mounted inertial navigation a. Basic idea b. Pros and cons 2. Inertial navigation a. The inertial sensors
Foot-mounted zerovelocity aided inertial navigation Isaac Skog skog@kth.se Course Outline 1. Foot-mounted inertial navigation a. Basic idea b. Pros and cons 2. Inertial navigation a. The inertial sensors
XYZ Exporter Page 1. XYZ Exporter
 XYZ Exporter Page 1 XYZ Exporter XYZ Exporter Page 2 1. Introduction This program was created to takeover from NaviScan Convert. It has the capability to export to various formats, where you have the possibility
XYZ Exporter Page 1 XYZ Exporter XYZ Exporter Page 2 1. Introduction This program was created to takeover from NaviScan Convert. It has the capability to export to various formats, where you have the possibility
Insertion Device Alignment for the Diamond Light Source
 Insertion Device Alignment for the Diamond Light Source A. Mariani Diamond Light Source, Chilton, Didcot, Oxon. OX11 0DE, UK This paper covers the survey and alignment techniques selected for the build
Insertion Device Alignment for the Diamond Light Source A. Mariani Diamond Light Source, Chilton, Didcot, Oxon. OX11 0DE, UK This paper covers the survey and alignment techniques selected for the build
Teledyne PDS. Cutter Dredge. Version March Teledyne RESON B.V. Stuttgartstraat AS Rotterdam The Netherlands
 Cutter Dredge Teledyne PDS Version 2.1.1 March 2017 Teledyne RESON B.V. Stuttgartstraat 42-44 3047 AS Rotterdam The Netherlands Tel.: +31 (0)10 245 15 00 www.teledyne-reson.com Teledyne RESON has made
Cutter Dredge Teledyne PDS Version 2.1.1 March 2017 Teledyne RESON B.V. Stuttgartstraat 42-44 3047 AS Rotterdam The Netherlands Tel.: +31 (0)10 245 15 00 www.teledyne-reson.com Teledyne RESON has made
UNIVERSITY CALIFORNIA, RIVERSIDE AERIAL TARGET GROUND CONTROL SURVEY REPORT JOB # DATE: MARCH 2011
 UNIVERSITY CALIFORNIA, RIVERSIDE AERIAL TARGET GROUND CONTROL SURVEY REPORT JOB # 2011018 DATE: MARCH 2011 UNIVERSITY CALIFORNIA, RIVERSIDE AERIAL TARGET GROUND CONTROL SURVEY REPORT I. INTRODUCTION II.
UNIVERSITY CALIFORNIA, RIVERSIDE AERIAL TARGET GROUND CONTROL SURVEY REPORT JOB # 2011018 DATE: MARCH 2011 UNIVERSITY CALIFORNIA, RIVERSIDE AERIAL TARGET GROUND CONTROL SURVEY REPORT I. INTRODUCTION II.
ITTC Recommended Procedures and Guidelines. ITTC Quality System Manual. Recommended Procedures and Guidelines
 Offshore Structures with Mooring Lines 7.5 Page 1 of 6 ITTC Quality System Manual Recommended Procedure Offshore Structures with Mooring Lines 7.5 Process Control 7.5- Testing and Extrapolation Methods
Offshore Structures with Mooring Lines 7.5 Page 1 of 6 ITTC Quality System Manual Recommended Procedure Offshore Structures with Mooring Lines 7.5 Process Control 7.5- Testing and Extrapolation Methods
QINSy. A Total Hydrographic Solution!
 QINSy A Total Hydrographic Solution! QINSy provides a user-friendly, turnkey solution for all types of marine navigation, positioning and surveying activities. From survey planning, to data collection,
QINSy A Total Hydrographic Solution! QINSy provides a user-friendly, turnkey solution for all types of marine navigation, positioning and surveying activities. From survey planning, to data collection,
Prepared for: CALIFORNIA COAST COMMISSION c/o Dr. Stephen Schroeter 45 Fremont Street, Suite 2000 San Francisco, CA
 REVIEW OF MULTIBEAM SONAR SURVEYS WHEELER REEF NORTH, SAN CLEMENTE, CALIFORNIA TO EVALUATE ACCURACY AND PRECISION OF REEF FOOTPRINT DETERMINATIONS AND CHANGES BETWEEN 2008 AND 2009 SURVEYS Prepared for:
REVIEW OF MULTIBEAM SONAR SURVEYS WHEELER REEF NORTH, SAN CLEMENTE, CALIFORNIA TO EVALUATE ACCURACY AND PRECISION OF REEF FOOTPRINT DETERMINATIONS AND CHANGES BETWEEN 2008 AND 2009 SURVEYS Prepared for:
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE Ekinox Series R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE Ekinox Series R&D specialists usually compromise between high
Geometric Rectification of Remote Sensing Images
 Geometric Rectification of Remote Sensing Images Airborne TerrestriaL Applications Sensor (ATLAS) Nine flight paths were recorded over the city of Providence. 1 True color ATLAS image (bands 4, 2, 1 in
Geometric Rectification of Remote Sensing Images Airborne TerrestriaL Applications Sensor (ATLAS) Nine flight paths were recorded over the city of Providence. 1 True color ATLAS image (bands 4, 2, 1 in
Pen Vibration Meter. User's Guide. Model VB Washington Street Melrose, MA Phone Toll Free
 User's Guide 99 Washington Street Melrose, MA 02176 Phone 781-665-1400 Toll Free 1-800-517-8431 Visit us at www.testequipmentdepot.com Pen Vibration Meter Model VB400 Introduction Congratulations on your
User's Guide 99 Washington Street Melrose, MA 02176 Phone 781-665-1400 Toll Free 1-800-517-8431 Visit us at www.testequipmentdepot.com Pen Vibration Meter Model VB400 Introduction Congratulations on your
SLiP. Source Line Processing
 SLiP Source Line Processing What is SLiP SLiP (Source Line Processing) is Windows based software for computing source positions. SLiP has been specifically written for OBC type seismic surveys. It deals
SLiP Source Line Processing What is SLiP SLiP (Source Line Processing) is Windows based software for computing source positions. SLiP has been specifically written for OBC type seismic surveys. It deals
NAVIPAC 4 INTRODUCTION AND WORKFLOW
 NAVIPAC 4 INTRODUCTION AND WORKFLOW Contents 1 Introduction to NaviPac... 3 2 Program Environment... 4 3 Hardware environment... 7 4 Workflow example... 8 4.1 Workflow: Creating a configuration... 9 4.1.1
NAVIPAC 4 INTRODUCTION AND WORKFLOW Contents 1 Introduction to NaviPac... 3 2 Program Environment... 4 3 Hardware environment... 7 4 Workflow example... 8 4.1 Workflow: Creating a configuration... 9 4.1.1
Introduction.
 Product information Image Systems AB Main office: Ågatan 40, SE-582 22 Linköping Phone +46 13 200 100, fax +46 13 200 150 info@imagesystems.se, Introduction TEMA Automotive is the world leading system
Product information Image Systems AB Main office: Ågatan 40, SE-582 22 Linköping Phone +46 13 200 100, fax +46 13 200 150 info@imagesystems.se, Introduction TEMA Automotive is the world leading system
WBS Readout Infrastructure
 WBS 2.6.3 Readout Infrastructure Craig Dukes University of Virginia Bill Gilbert University of Minnesota CD2/3a DOE Review of NOυA October 23-25, 2007 Organization 1. Power Distribution System (PDS) (Dukes)
WBS 2.6.3 Readout Infrastructure Craig Dukes University of Virginia Bill Gilbert University of Minnesota CD2/3a DOE Review of NOυA October 23-25, 2007 Organization 1. Power Distribution System (PDS) (Dukes)
Software for Hydrographic Data Processing
 Software for Hydrographic Data Processing Data courtesy of Dr. T. Komatsu, Tokyo University Ocean Research Institute CleanSweep provides a fast, user friendly environment for processing hydrographic survey
Software for Hydrographic Data Processing Data courtesy of Dr. T. Komatsu, Tokyo University Ocean Research Institute CleanSweep provides a fast, user friendly environment for processing hydrographic survey
Collaboration is encouraged among small groups (e.g., 2-3 students).
.") Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
12. Rotary Retract Movement Setup Clearance Tool Change X Safe Positions Custom Settings Reference
 NMV This manual was prepared with the assumption that the intended reader does have working knowledge of Esprit and NMV programming experience so that he fully understands the information it contains.
NMV This manual was prepared with the assumption that the intended reader does have working knowledge of Esprit and NMV programming experience so that he fully understands the information it contains.
VISUALIZATION OF ADCP MEASUREMENTS AND 3D NUMERICAL MODEL RESULTS
 VISUALIZATION OF ADCP MEASUREMENTS AND 3D NUMERICAL MODEL RESULTS J.GEILS, P. KONTNY, A. MATHEJA, O. STOSCHEK, C. ZIMMERMANN Franzius-Institute for Hydraulic, Waterways and Coastal Engineering University
VISUALIZATION OF ADCP MEASUREMENTS AND 3D NUMERICAL MODEL RESULTS J.GEILS, P. KONTNY, A. MATHEJA, O. STOSCHEK, C. ZIMMERMANN Franzius-Institute for Hydraulic, Waterways and Coastal Engineering University
BRx6 Sensor Calibration Using SurvCE/SurvPC
 OVERVIEW BRx6 Sensor Calibration Using SurvCE/SurvPC The BRx6 internal sensors (tilt, accelerometer and compass) must be calibrated in order to use the electronic bubble and tilted pole corrections in
OVERVIEW BRx6 Sensor Calibration Using SurvCE/SurvPC The BRx6 internal sensors (tilt, accelerometer and compass) must be calibrated in order to use the electronic bubble and tilted pole corrections in
QC20-W wireless ballbar system description and specifications
 QC20-W wireless ballbar system QC20-W wireless ballbar system description and specifications Hardware Software QC20-W ballbar and ballbar kit QC20-W ballbar The QC20-W ballbar contains a precision linear
QC20-W wireless ballbar system QC20-W wireless ballbar system description and specifications Hardware Software QC20-W ballbar and ballbar kit QC20-W ballbar The QC20-W ballbar contains a precision linear
Tu A4 09 3D CSEM Inversion Of Data Affected by Infrastructure
 Tu A4 09 3D CSEM Inversion Of Data Affected by Infrastructure J.P. Morten (EMGS), L. Berre* (EMGS), S. de la Kethulle de Ryhove (EMGS), V. Markhus (EMGS) Summary We consider the effect of metal infrastructure
Tu A4 09 3D CSEM Inversion Of Data Affected by Infrastructure J.P. Morten (EMGS), L. Berre* (EMGS), S. de la Kethulle de Ryhove (EMGS), V. Markhus (EMGS) Summary We consider the effect of metal infrastructure
UndErwatEr acoustic modems. product information GUidE
 UndErwatEr acoustic modems product information GUidE evologics s2c R - series underwater acoustic modems EvoLogics S2CR - series underwater acoustic modems provide full-duplex digital communication using
UndErwatEr acoustic modems product information GUidE evologics s2c R - series underwater acoustic modems EvoLogics S2CR - series underwater acoustic modems provide full-duplex digital communication using
Eye4Software Hydromagic Dredging Installing on a single ladder cutter dredger
 Eye4Software Hydromagic Dredging Installing on a single ladder cutter dredger INTRODUCTION Since version 7.0 of Eye4Software Hydromagic, it is possible to monitor the dredging depth and position of your
Eye4Software Hydromagic Dredging Installing on a single ladder cutter dredger INTRODUCTION Since version 7.0 of Eye4Software Hydromagic, it is possible to monitor the dredging depth and position of your
Sphero Lightning Lab Cheat Sheet
 Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
INNOVATUM REFERENCE MANUALS. Section 4-1. Smartrak Description & Installation
 INNOVATUM REFERENCE MANUALS Section 4-1 Smartrak Description & Installation The electronic version of this document is the controlled copy. All printed versions are thus uncontrolled and may not be current.
INNOVATUM REFERENCE MANUALS Section 4-1 Smartrak Description & Installation The electronic version of this document is the controlled copy. All printed versions are thus uncontrolled and may not be current.
DATA FORMAT DEFINITION DOCUMENT
 Document Number: 11542 Rev: A Reson, Inc. Goleta, CA 93117 Document Title: DATA FORMAT DEFINITION DOCUMENT SeaBat 7k Data Format, Volume I Notice of Proprietary Rights The contents of this document are
Document Number: 11542 Rev: A Reson, Inc. Goleta, CA 93117 Document Title: DATA FORMAT DEFINITION DOCUMENT SeaBat 7k Data Format, Volume I Notice of Proprietary Rights The contents of this document are
Pixus Technologies Catalog
 The Power of Embedded Ingenuity Pixus Technologies Catalog Kaparel, Ripac, & Vario Brand Products www.pixustechnologies.com sales@pixustechnologies.com US: 916.524.8242 CAN: 519.885.5775 Order Information
The Power of Embedded Ingenuity Pixus Technologies Catalog Kaparel, Ripac, & Vario Brand Products www.pixustechnologies.com sales@pixustechnologies.com US: 916.524.8242 CAN: 519.885.5775 Order Information
GI-Eye II GPS/Inertial System For Target Geo-Location and Image Geo-Referencing
 GI-Eye II GPS/Inertial System For Target Geo-Location and Image Geo-Referencing David Boid, Alison Brown, Ph. D., Mark Nylund, Dan Sullivan NAVSYS Corporation 14960 Woodcarver Road, Colorado Springs, CO
GI-Eye II GPS/Inertial System For Target Geo-Location and Image Geo-Referencing David Boid, Alison Brown, Ph. D., Mark Nylund, Dan Sullivan NAVSYS Corporation 14960 Woodcarver Road, Colorado Springs, CO
Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE. For all mobile surveying applications
 Qinertia THE NEXT GENERATION /GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
Qinertia THE NEXT GENERATION /GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
Description. 2.8 Robot Motion. Floor-mounting. Dimensions apply to IRB 6400/ Shelf-mounting
 Description 2.8 Robot Motion Floor-mounting Dimensions apply to IRB 64/ 3.-7 2943 694 146 3 Shelf-mounting 67 94 2871 184 3116 Figure 8 Working space of IRB 64 and IRB 64S (dimensions in mm). Product Specification
Description 2.8 Robot Motion Floor-mounting Dimensions apply to IRB 64/ 3.-7 2943 694 146 3 Shelf-mounting 67 94 2871 184 3116 Figure 8 Working space of IRB 64 and IRB 64S (dimensions in mm). Product Specification
Total station assignment
 Total station assignment Objective: Control survey densification for detail surveying Location: Otaniemi campus, Innopoli 3 park area Equipment: Total Station (or electronic theodolite) and target device
Total station assignment Objective: Control survey densification for detail surveying Location: Otaniemi campus, Innopoli 3 park area Equipment: Total Station (or electronic theodolite) and target device
Thermal Mass Flowmeter Sensyflow FMT200-D
 Data Sheet Thermal Mass Flowmeter Sensyflow FMT200-D Direct measurement of mass flow or standard volume flow of compressed air, nitrogen and biogas independent of media pressure and temperature Wide measuring
Data Sheet Thermal Mass Flowmeter Sensyflow FMT200-D Direct measurement of mass flow or standard volume flow of compressed air, nitrogen and biogas independent of media pressure and temperature Wide measuring
Proceedings of Western Dredging Association and Texas A&M University Center for Dredging Studies' "Dredging Summit and Expo 2015"
 Proceedings of Western Dredging Association and Texas A&M University Center for Dredging Studies' DYNAMIC UNDERWATER 3D SURVEY AND MONITORING DURING RECENT PLATFORM DREDGING OPERATION: REDUCING RISK AND
Proceedings of Western Dredging Association and Texas A&M University Center for Dredging Studies' DYNAMIC UNDERWATER 3D SURVEY AND MONITORING DURING RECENT PLATFORM DREDGING OPERATION: REDUCING RISK AND
DPS900 SOFTWARE QUICK REFERENCE CARD FOR PILING OPERATORS
 DPS900 SOFTWARE QUICK REFERENCE CARD FOR PILING OPERATORS This document contains information for piling operators on how to use the Trimble DPS900 software. For information for supervisors, please refer
DPS900 SOFTWARE QUICK REFERENCE CARD FOR PILING OPERATORS This document contains information for piling operators on how to use the Trimble DPS900 software. For information for supervisors, please refer
Surface Mount Multilayer Ceramic Chip Capacitors
 Surface Mount Multilayer Ceramic Chip Capacitors Access hole at slot location (Ø 40 mm min.) W 3 Includes flange distortion at outer edge D Full radius W 2 (measured at hub) A C Arbor hole diameter N (hub
Surface Mount Multilayer Ceramic Chip Capacitors Access hole at slot location (Ø 40 mm min.) W 3 Includes flange distortion at outer edge D Full radius W 2 (measured at hub) A C Arbor hole diameter N (hub
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Aided-inertial for GPS-denied Navigation and Mapping
 Aided-inertial for GPS-denied Navigation and Mapping Erik Lithopoulos Applanix Corporation 85 Leek Crescent, Richmond Ontario, Canada L4B 3B3 elithopoulos@applanix.com ABSTRACT This paper describes the
Aided-inertial for GPS-denied Navigation and Mapping Erik Lithopoulos Applanix Corporation 85 Leek Crescent, Richmond Ontario, Canada L4B 3B3 elithopoulos@applanix.com ABSTRACT This paper describes the
System for definition of the pipeline diagram
 System for definition of the pipeline diagram SERGIY SADOVNYCHIY Pipeline research program, Mexican Petroleum Institute, Eje Central Lázaro Cárdenas Nte152 Col San Bartolo Atepehuacan México, DF CP07730,
System for definition of the pipeline diagram SERGIY SADOVNYCHIY Pipeline research program, Mexican Petroleum Institute, Eje Central Lázaro Cárdenas Nte152 Col San Bartolo Atepehuacan México, DF CP07730,
Chapter 6 : Results and Discussion
 Refinement and Verification of the Virginia Tech Doppler Global Velocimeter (DGV) 86 Chapter 6 : Results and Discussion 6.1 Background The tests performed as part of this research were the second attempt
Refinement and Verification of the Virginia Tech Doppler Global Velocimeter (DGV) 86 Chapter 6 : Results and Discussion 6.1 Background The tests performed as part of this research were the second attempt
Workhorse ADCP Multi- Directional Wave Gauge Primer
 Acoustic Doppler Solutions Workhorse ADCP Multi- Directional Wave Gauge Primer Brandon Strong October, 2000 Principles of ADCP Wave Measurement The basic principle behind wave the measurement, is that
Acoustic Doppler Solutions Workhorse ADCP Multi- Directional Wave Gauge Primer Brandon Strong October, 2000 Principles of ADCP Wave Measurement The basic principle behind wave the measurement, is that
NEW APPROACH FOR SAFE, FAST AND ACCURATE SURVEY OF DEEP MINE SHAFTS
 NEW APPROACH FOR SAFE, FAST AND ACCURATE SURVEY OF DEEP MINE SHAFTS by Norbert Benecke & Peter Cain DMT GmbH &Co. KG, Germany / DMT Geosciences, Canada Kinemattic Shaft Survey 2013 Page 1 Who is DMT? is
NEW APPROACH FOR SAFE, FAST AND ACCURATE SURVEY OF DEEP MINE SHAFTS by Norbert Benecke & Peter Cain DMT GmbH &Co. KG, Germany / DMT Geosciences, Canada Kinemattic Shaft Survey 2013 Page 1 Who is DMT? is
MODULAR HUB AND SPOKE 17 NOVEMBER 2017
 MODULAR HUB AND SPOKE 17 NOVEMBER 2017 Executive Summary Future North Sea offshore wind farms will increasingly be located further from shore. The longer distances to shore and generally deeper waters
MODULAR HUB AND SPOKE 17 NOVEMBER 2017 Executive Summary Future North Sea offshore wind farms will increasingly be located further from shore. The longer distances to shore and generally deeper waters
v CMS-Wave Analysis SMS 12.2 Tutorial Prerequisites Requirements Time Objectives
 v. 12.2 SMS 12.2 Tutorial Objectives This workshop gives a brief introduction to the CMS-Wave interface and model. This model is similar to STWAVE and the tutorial for the models is similar. As with the
v. 12.2 SMS 12.2 Tutorial Objectives This workshop gives a brief introduction to the CMS-Wave interface and model. This model is similar to STWAVE and the tutorial for the models is similar. As with the
Three-Dimensional Laser Scanner. Field Evaluation Specifications
 Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
Boresight alignment method for mobile laser scanning systems
 Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Available Services for Small Bore Connections (SBC)
") Evaluation of vibration induced fatigue failure on SBCs for new projects (design) or existing piping systems Vibration induced failures on Small Bore Connections (SBCs) are the most common integrity issues
Evaluation of vibration induced fatigue failure on SBCs for new projects (design) or existing piping systems Vibration induced failures on Small Bore Connections (SBCs) are the most common integrity issues
This course provides introductory knowledge of the land survey systems used in the United States - Congressional/Jeffersonian, Metes and Bounds,
 PDM-001 Introduction to High quality, trusted and accessible data and information is essential to the oil and gas industry. As the professional society for data managers, the plays a key role in meeting
PDM-001 Introduction to High quality, trusted and accessible data and information is essential to the oil and gas industry. As the professional society for data managers, the plays a key role in meeting
Strapdown Inertial Navigation Technology
 Strapdown Inertial Navigation Technology 2nd Edition David Titterton and John Weston The Institution of Engineering and Technology Preface xv 1 Introduction 1 1.1 Navigation 1 1.2 Inertial navigation 2
Strapdown Inertial Navigation Technology 2nd Edition David Titterton and John Weston The Institution of Engineering and Technology Preface xv 1 Introduction 1 1.1 Navigation 1 1.2 Inertial navigation 2
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Version 3.0. SolidCitricTM. product presentation
 Version 3.0 product presentation SolidCitric Product overview SolidCitric products Interface to be treated SolidCitric Product overview SolidCitric products Interface to be treated SolidCitric How it Works
Version 3.0 product presentation SolidCitric Product overview SolidCitric products Interface to be treated SolidCitric Product overview SolidCitric products Interface to be treated SolidCitric How it Works
XL-80 spares list. Application note. Overview
 XL-80 spares list Overview This application note lists the system components for the XL-80 laser system. To order please contact your local Renishaw office at www.renishaw.com/contact Description XL-80
XL-80 spares list Overview This application note lists the system components for the XL-80 laser system. To order please contact your local Renishaw office at www.renishaw.com/contact Description XL-80
Using Mobile LiDAR To Efficiently Collect Roadway Asset and Condition Data. Pierre-Paul Grondin, B.Sc. Surveying
 Using Mobile LiDAR To Efficiently Collect Roadway Asset and Condition Data Pierre-Paul Grondin, B.Sc. Surveying LIDAR (Light Detection and Ranging) The prevalent method to determine distance to an object
Using Mobile LiDAR To Efficiently Collect Roadway Asset and Condition Data Pierre-Paul Grondin, B.Sc. Surveying LIDAR (Light Detection and Ranging) The prevalent method to determine distance to an object
T-SERIES INDUSTRIAL INCLINOMETER ANALOG INTERFACE
 T-SERIES INDUSTRIAL INCLINOMETER ANALOG INTERFACE T-Series industrial inclinometers are compact high performance sensors used to determine inclination in roll and pitch axes with excellent precision and
T-SERIES INDUSTRIAL INCLINOMETER ANALOG INTERFACE T-Series industrial inclinometers are compact high performance sensors used to determine inclination in roll and pitch axes with excellent precision and
OTC are critical locations that exhibit complex response having the lowest predicted fatigue life.
 OTC 17248 A Fatigue Monitoring Strategy & Implementation on a Deepwater Top Tensioned Riser Ricky Thethi, 2H Offshore Inc.; Hugh Howells, 2H Offshore Engineering Limited; Shreenaath Natarajan, 2H Offshore
OTC 17248 A Fatigue Monitoring Strategy & Implementation on a Deepwater Top Tensioned Riser Ricky Thethi, 2H Offshore Inc.; Hugh Howells, 2H Offshore Engineering Limited; Shreenaath Natarajan, 2H Offshore
Doc #: IDI06-11F Rev: 1.3 Issued: 22/02/18. Well Seeker PRO How To Guide Rev 1.3. Page 1 of 26
 Well Seeker PRO How To Guide Rev 1.3 Page 1 of 26 Contents 1.0 - Getting Started... 4 1.1 - Display... 4 2.0 - Creating a new Well... 5 2.1 - Unit Selection... 5 2.2 - New Instant Plan / Survey... 6 2.3
Well Seeker PRO How To Guide Rev 1.3 Page 1 of 26 Contents 1.0 - Getting Started... 4 1.1 - Display... 4 2.0 - Creating a new Well... 5 2.1 - Unit Selection... 5 2.2 - New Instant Plan / Survey... 6 2.3
How Emerson s I/O on Demand Is Changing the Automation Infrastructure
 ARC VIEW MARCH 25, 2010 How Emerson s I/O on Demand Is Changing the Automation Infrastructure By Larry O Brien Summary Many factors at work today are radically changing the world of conventional I/O. Fieldbus
ARC VIEW MARCH 25, 2010 How Emerson s I/O on Demand Is Changing the Automation Infrastructure By Larry O Brien Summary Many factors at work today are radically changing the world of conventional I/O. Fieldbus
UNDERWATER ACOUSTIC MODEMS PRODUCT INFORMATION GUIDE
 UNDERWATER ACOUSTIC MODEMS PRODUCT INFORMATION GUIDE EvoLogics Underwater Acoustic Modems EvoLogics underwater acoustic modems provide full-duplex digital communication using EvoLogics' patented S2C (Sweep-
UNDERWATER ACOUSTIC MODEMS PRODUCT INFORMATION GUIDE EvoLogics Underwater Acoustic Modems EvoLogics underwater acoustic modems provide full-duplex digital communication using EvoLogics' patented S2C (Sweep-
The Applanix Approach to GPS/INS Integration
 Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
5-Axis Flex Track Drilling Systems on Complex Contours: Solutions for Position Control
 5-Axis Flex Track Drilling Systems on Complex Contours: Solutions for Position Control 2013-01-2224 Published 09/17/2013 Joseph R. Malcomb Electroimpact Inc. Copyright 2013 SAE International doi:10.4271/2013-01-2224
5-Axis Flex Track Drilling Systems on Complex Contours: Solutions for Position Control 2013-01-2224 Published 09/17/2013 Joseph R. Malcomb Electroimpact Inc. Copyright 2013 SAE International doi:10.4271/2013-01-2224
Optis Electric Line HD
 Optis Electric Line HD Optis Electric Line HD is a step change in downhole video technology providing colour, 25 frames per second video, on mono-conductor cables. Colour images provide a new level of
Optis Electric Line HD Optis Electric Line HD is a step change in downhole video technology providing colour, 25 frames per second video, on mono-conductor cables. Colour images provide a new level of
3D Programming. 3D Programming Concepts. Outline. 3D Concepts. 3D Concepts -- Coordinate Systems. 3D Concepts Displaying 3D Models
 3D Programming Concepts Outline 3D Concepts Displaying 3D Models 3D Programming CS 4390 3D Computer 1 2 3D Concepts 3D Model is a 3D simulation of an object. Coordinate Systems 3D Models 3D Shapes 3D Concepts
3D Programming Concepts Outline 3D Concepts Displaying 3D Models 3D Programming CS 4390 3D Computer 1 2 3D Concepts 3D Model is a 3D simulation of an object. Coordinate Systems 3D Models 3D Shapes 3D Concepts
Motion estimation of unmanned marine vehicles Massimo Caccia
 Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it
Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it