Maths in Motion. Danny Chapman Cumberland Lodge - February Version for distribution. Procedural animation in video games
|
|
|
- David Norris
- 5 years ago
- Views:
Transcription
1 Maths in Motion Procedural animation in video games Danny Chapman Cumberland Lodge - February 2017 Version for distribution






2

3 01_BipedLearning

4 02_SIG05_Showreel - Endorphin
5 Types of animation Types of motion: Kinematic: Motion without regard to physics (mass or forces) Dynamic: Motion as a result of forces Methods: Forward: Generating motion given the starting point and controls Inverse: Generating controls given the start and end states
6 Kinematics Forward Inverse Dynamics Key-framed animation Motion-capture data Ocean wave emulation (using spectral synthesis) Rigid body simulation Soft body simulation Water/fluid simulation Characters: Reach a point Part of robot motion planning Biomechanics. Robotics. Goal-orientated (physical) behaviours

7 03_ClumsyNinjaDemo




8 Clumsy Ninja Forward dynamics Forward kinematics Inverse kinematics Inverse dynamics

9
10
11
12
13
14 Navigating a skeletal hierarchy F2 F3 F1 3 P P F0 0 P Each bone coordinate frame indicates where it is relative to its parent, and how to transform points/frames into its parent space: Point P can be expressed in frame 2F3 by 3P If we want it in the world frame, then 0P = 0F1 1F2 2F3 3P Where the Fs operate on their right (details depend on whether they are implemented as 4x4 matrices, quaternion plus translation etc.)
: Bi(t) = interp(ai, Ci,")
 RC and orthonormalise.")
15 Interpolating and blending To blend between two poses (A and C), just interpolate each frame (indexed by i): Bi(t) = interp(ai, Ci, t) Position: just PB = t PA + (1 - t) PC for each frame Orientation: RB = t RA + (1 - t) RC and orthonormalise... or (better) slerp quaternions

16
17 Motion matching Three steps: 1. Record lots of motion (typically mocap) 2. Each update, tell the system what kind of motion you want. 3. System gives you a new animation frame that is consistent with: a. b. What it was doing previously What you want. Automatically select and play frames from a (long) animation clip containing all desired movement, based on a requested movement: No more blends and transitions! Motion Field for Interactive Character Animation: Yongjoon Lee, Kevin Wampler, Gilbert Bernstein, Jovan Popović, Zoran Popović - ACM Transactions on Graphics 29(5) (SIGGRAPH Asia 2010)
18 Motion matching - preprocessing step For every frame in your source animation (40 30FPS = 72k frames): Calculate the velocity of the root The trajectory out to 1 sec in the future The trajectory back to 1 sec in the past The position of a few bones relative to the root - e.g. the feet. Big animation clip - 72k frames Root motion from above: Extra data stored with each frame
19 Motion matching - at runtime Predicted path Current pose History Cost function measures the difference between each of the 72k candidate frames, and our current/history/predicted state. Pick the source frame that minimises the cost function. 30 times a second per character (budget is < 1ms)! Nice optimisation problem (e.g. nearest neighbours search to get candidates in an 18 dimensional space).

20 Ubisoft: Motion Matching
21 Inverse Kinematics If the chain starts at the origin, and each joint is determined by joint parameters θ1,...,θn (each 3x1) then the frame of the last joint (effector) is 0 FN(θ1,...,θN) = 0F1(θ1) 1F2(θ2)... N-1FN(θN) Let the end joint be called an effector. Effector state vector is the position and world-space orientation of 0FN s(θ1,...,θn) = [px py pz Ψ Θ Φ]T If we have a target state t we want s(θ1,...,θn) = t Need to determine [θ1,...,θn] by inverting this relationship.
22 Approaches to IK Methods Analytical/closed form - e.g. 2 links + pole vector Blend based - interpolate N poses Cyclic Coordinate Descent (CCD) Jacobian inverse Generic optimisation Considerations Speed & memory Style control - do animators like cost functions, or can they pass in a pose? Handling of additional constraints (joint limits) Behaviour with hard/impossible targets
. Differentiate: ds = df(θ)/dθ dθ = J dθ 6x1 = 6xN Jacobian J tells us how s will move if the joint angles are changed.")
23 Jacobian inverse solvers Forwards kinematics equation: s = f(θ) s is the position/orientation of an end effector (or multiple), Θ is the N joint angles in the chain(s). Differentiate: ds = df(θ)/dθ dθ = J dθ 6x1 = 6xN Jacobian J tells us how s will move if the joint angles are changed. Nx1
24 Solving Invert the FK Jacobian equation, calculate the error e = s = t - s, assume linearity: Θ J-1 e Solution method: Start from a pose Calculate J and invert it Integrate a few times (calculating J each iteration) Problems: Assumption of linearity is very poor when J is nearly singular J doesn t generally have an inverse - need something in place of J-1 Transpose can be used, but is not good...
25 Pseudo-inverse J dθ = ds J dθ = ( J JT) (J JT)-1 ds = J JT (J JT)-1 ds dθ = JT (J JT)-1 ds dθ = J ds with J = JT (J JT)-1 J is 6xN but J JT is 6x6 The pseudo-inverse is a true solution Can improve behaviour near singularities using a damped least squares term: J = JT (J JT + λi)-1 Add additional terms to apply other constraints (centre of gravity), bias away from limits, null-space projection for redundancy control.

26 Ikinema - Recreate complete characters based on tracking a few body parts
27 Simulation of rigid bodies Constant: Surface properties Mass and moments of inertia Collision geometry (shape) - may or may not be the same as what is drawn. Varying: Position P = [Px Py Pz]T Orientation R - 3x3 matrix or a quaternion Velocity V = [Vx Vy Vz]T Angular velocity w = (wx wy wz)t

28 Forwards dynamics Newton-Euler equations for a rigid body: dr/dt = v dq/dt = 1/2 ω q m a = m dv/dt = F I dω/dt = - ω x I ω Update in steps of t: Integrate v and ω to give new r and q Accumulate forces F and torques Integrate to give new v and ω
29 Calculating forces and impulses Impulse J = F t Inelastic collision so want v = -v Mass = m v Impulse J = m v = -m v Immovable object
30 Calculating impulses Two movable rigid bodies, single contact point: If frictionless then any impulse is normal to the contact Apply impulse jc along N on body A (-jc on body B) Desired change in relative velocity at contact: vc = N vc jc = me vc if vc > 0 A N B jc = 0 otherwise Where me is an effective mass - depends only on the geometry, mass and inertia properties.
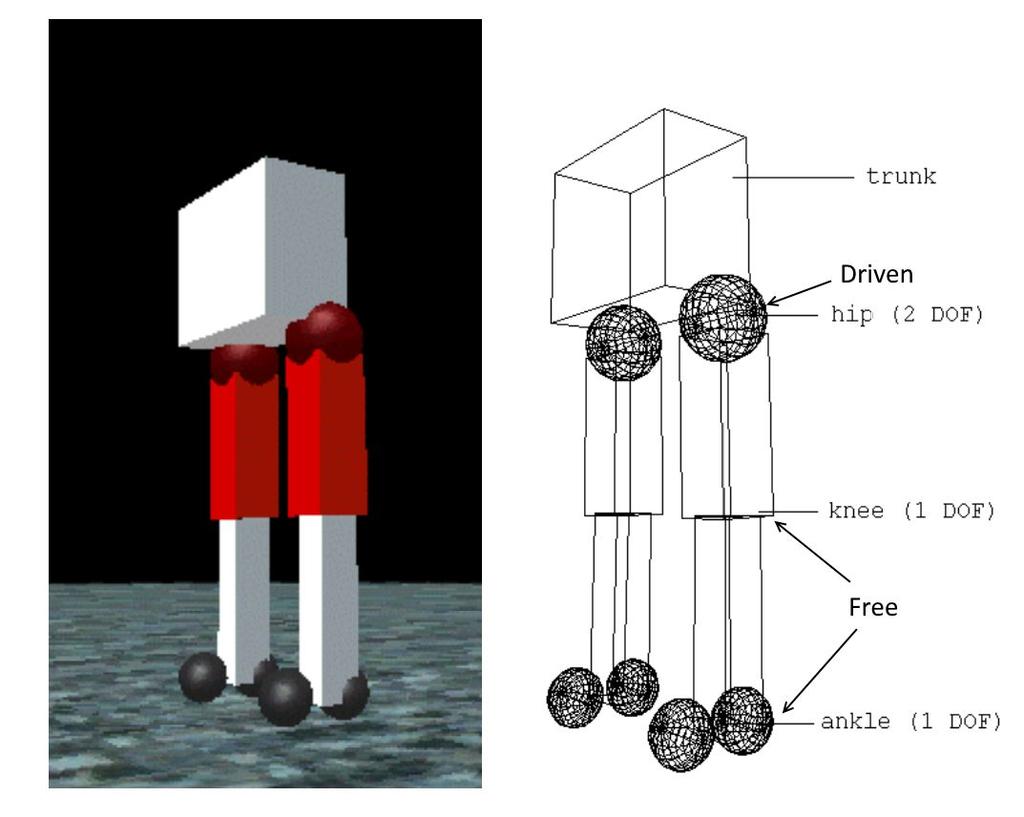
31 Featherstone s articulated body method Maximal coordinates: Reduced coordinates: 12 links 6 DoF for each Root link provides 6 DoF Simulate 72 DoF in total 11 revolute joints provide 33 DoF Apply 11 revolute joint constraints to remove 33 DoF Simulate 39 DoF. Featherstone s method: Solves the unconstrained motion of the articulation as a single entity. Response of the whole articulation to localised forces/impulses (like me). Internal joint constraints cannot be violated. Hard to understand and implement!
32 Multiple constraints Multiple bodies and constraints: Each impulse ijc affects not just ivc but all connected contacts. Can solve as a (mixed) linear complementarity problem with (big) arrays representing the effective mass matrix etc. Exact solvers (Pivoting): They re exact, but no way to trade speed for accuracy. An exact solve of a unrealistic system is sometimes very bad (e.g. conflicting constraints), or doesn t exist. Iterative (Projected Gauss-Seidel): Well behaved. Can terminate early - speed/accuracy trade-off. Don t even need to form the matrix representation.

33 GPU based simulation Nvidia - PhysX
34 Control of physical characters Realistic Modeling of Bird Flight Animations - Wu, J and Popović, Z

35 Learning bicycle stunts - Tan, Gu, Liu & Turk
36 Complete list of games using optimal control techniques on characters:
37 Inverse Dynamics: Making things happen Forwards Dynamics: Calculate motion given control inputs. Inverse Dynamics: Calculate control inputs given observed/desired motion. For biomechanics and robotics: Observed/desired motion may be known exactly. Research in trajectory optimisation, underactuated robotics etc. For games: Create a virtual stuntman

38 08_Euphoria
39 Dynamic control in games Is this the future? Emergent gameplay Unique game moments Links with robotics, UAVs etc We can cheat! The challenges: Hard problem Computationally expensive Game designers lose control Multiplayer and determinacy



40 Summary Thanks to NaturalMotion - and Clumsy Ninja (ios and Android)

41 Internships and NaturalMotion:
CS 775: Advanced Computer Graphics. Lecture 3 : Kinematics
 CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics. Velocity Interpolation. Handing Free Surface with MAC
 Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
4 Kinematic Linkages. Chapter 4. Kinematic Linkages. Department of Computer Science and Engineering 4-1
 Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
Computer Animation. Rick Parent
 Algorithms and Techniques Kinematic Linkages Hierarchical Modeling Relative motion Parent-child relationship Simplifies motion specification Constrains motion Reduces dimensionality Modeling & animating
Algorithms and Techniques Kinematic Linkages Hierarchical Modeling Relative motion Parent-child relationship Simplifies motion specification Constrains motion Reduces dimensionality Modeling & animating
Overview. Animation is a big topic We will concentrate on character animation as is used in many games today. humans, animals, monsters, robots, etc.
 ANIMATION Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character is represented
ANIMATION Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character is represented
Animation, Motion Capture, & Inverse Kinematics. Announcements: Quiz
 Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018
 CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018") Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
Articulated Characters
 Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Announcements: Quiz. Animation, Motion Capture, & Inverse Kinematics. Last Time? Today: How do we Animate? Keyframing. Procedural Animation
 Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Motion Capture & Simulation
 Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
animation projects in digital art animation 2009 fabio pellacini 1
 animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
Last Time? Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Advanced Graphics and Animation
 Advanced Graphics and Animation Character Marco Gillies and Dan Jones Goldsmiths Aims and objectives By the end of the lecture you will be able to describe How 3D characters are animated Skeletal animation
Advanced Graphics and Animation Character Marco Gillies and Dan Jones Goldsmiths Aims and objectives By the end of the lecture you will be able to describe How 3D characters are animated Skeletal animation
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Character Animation 1
 Character Animation 1 Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character
Character Animation 1 Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character
Animation, Motion Capture, & Inverse Kinematics
 Animation, Motion Capture, & Inverse Kinematics Pop Worksheet! Teams of 2. SOMEONE YOU HAVEN T ALREADY WORKED WITH Enumerate all cases (including rotations) of the 2D version of Marching Cubes, labeling
Animation, Motion Capture, & Inverse Kinematics Pop Worksheet! Teams of 2. SOMEONE YOU HAVEN T ALREADY WORKED WITH Enumerate all cases (including rotations) of the 2D version of Marching Cubes, labeling
Animation. CS 4620 Lecture 32. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Motion Synthesis and Editing. Yisheng Chen
 Motion Synthesis and Editing Yisheng Chen Overview Data driven motion synthesis automatically generate motion from a motion capture database, offline or interactive User inputs Large, high-dimensional
Motion Synthesis and Editing Yisheng Chen Overview Data driven motion synthesis automatically generate motion from a motion capture database, offline or interactive User inputs Large, high-dimensional
Game Programming. Bing-Yu Chen National Taiwan University
 Game Programming Bing-Yu Chen National Taiwan University Character Motion Hierarchical Modeling Character Animation Motion Editing 1 Hierarchical Modeling Connected primitives 2 3D Example: A robot arm
Game Programming Bing-Yu Chen National Taiwan University Character Motion Hierarchical Modeling Character Animation Motion Editing 1 Hierarchical Modeling Connected primitives 2 3D Example: A robot arm
Animation. CS 4620 Lecture 33. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Character Animation. Presented by: Pam Chow
 Character Animation Presented by: Pam Chow Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. PLAZMO AND
Character Animation Presented by: Pam Chow Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. PLAZMO AND
Kinematics. CS 448D: Character Animation Prof. Vladlen Koltun Stanford University
 Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
Rigging / Skinning. based on Taku Komura, Jehee Lee and Charles B.Own's slides
 Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Animation. CS 465 Lecture 22
 Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Motion Capture. Motion Capture in Movies. Motion Capture in Games
 Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
KINEMATICS FOR ANIMATION. Rémi Ronfard, Animation, M2R MOSIG
 KINEMATICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Direct and inverse kinematics in animation Fast numerical methods for inverse kinematics by Bill Baxter My Adventures with Inverse Kinematics
KINEMATICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Direct and inverse kinematics in animation Fast numerical methods for inverse kinematics by Bill Baxter My Adventures with Inverse Kinematics
Introduction to Computer Graphics. Animation (1) May 19, 2016 Kenshi Takayama
 May 19, 2016 Kenshi Takayama") Introduction to Computer Graphics Animation (1) May 19, 2016 Kenshi Takayama Skeleton-based animation Simple Intuitive Low comp. cost https://www.youtube.com/watch?v=dsonab58qva 2 Representing a pose using
Introduction to Computer Graphics Animation (1) May 19, 2016 Kenshi Takayama Skeleton-based animation Simple Intuitive Low comp. cost https://www.youtube.com/watch?v=dsonab58qva 2 Representing a pose using
Animation. Keyframe animation. CS4620/5620: Lecture 30. Rigid motion: the simplest deformation. Controlling shape for animation
 Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
A Detailed Look into Forward and Inverse Kinematics
 A Detailed Look into Forward and Inverse Kinematics Kinematics = Study of movement, motion independent of the underlying forces that cause them September 19-26, 2016 Kinematics Preliminaries Preliminaries:
A Detailed Look into Forward and Inverse Kinematics Kinematics = Study of movement, motion independent of the underlying forces that cause them September 19-26, 2016 Kinematics Preliminaries Preliminaries:
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
DYNAMICS FOR ANIMATION. Rémi Ronfard, Animation, M2R MOSIG
 DYNAMICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Summary of physics-based animation Motivation Newton s Laws Point-mass models Rigid and articulated bodies Ragdoll physics From kinematics to dynamics
DYNAMICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Summary of physics-based animation Motivation Newton s Laws Point-mass models Rigid and articulated bodies Ragdoll physics From kinematics to dynamics
CS 231. Inverse Kinematics Intro to Motion Capture. 3D characters. Representation. 1) Skeleton Origin (root) Joint centers/ bones lengths
 Skeleton Origin (root) Joint centers/ bones lengths") CS Inverse Kinematics Intro to Motion Capture Representation D characters ) Skeleton Origin (root) Joint centers/ bones lengths ) Keyframes Pos/Rot Root (x) Joint Angles (q) Kinematics study of static
CS Inverse Kinematics Intro to Motion Capture Representation D characters ) Skeleton Origin (root) Joint centers/ bones lengths ) Keyframes Pos/Rot Root (x) Joint Angles (q) Kinematics study of static
COMP 175 COMPUTER GRAPHICS. Lecture 10: Animation. COMP 175: Computer Graphics March 12, Erik Anderson 08 Animation
 Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Robots are built to accomplish complex and difficult tasks that require highly non-linear motions.
 Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Kinematical Animation.
 Kinematical Animation 3D animation in CG Goal : capture visual attention Motion of characters Believable Expressive Realism? Controllability Limits of purely physical simulation : - little interactivity
Kinematical Animation 3D animation in CG Goal : capture visual attention Motion of characters Believable Expressive Realism? Controllability Limits of purely physical simulation : - little interactivity
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
animation computer graphics animation 2009 fabio pellacini 1
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
CS-184: Computer Graphics. Today. Forward kinematics Inverse kinematics. Wednesday, November 12, Pin joints Ball joints Prismatic joints
 CS-184: Computer Graphics Lecture #18: Forward and Prof. James O Brien University of California, Berkeley V2008-F-18-1.0 1 Today Forward kinematics Inverse kinematics Pin joints Ball joints Prismatic joints
CS-184: Computer Graphics Lecture #18: Forward and Prof. James O Brien University of California, Berkeley V2008-F-18-1.0 1 Today Forward kinematics Inverse kinematics Pin joints Ball joints Prismatic joints
Animation by Adaptation Tutorial 1: Animation Basics
 Animation by Adaptation Tutorial 1: Animation Basics Michael Gleicher Graphics Group Department of Computer Sciences University of Wisconsin Madison http://www.cs.wisc.edu/graphics Outline Talk #1: Basics
Animation by Adaptation Tutorial 1: Animation Basics Michael Gleicher Graphics Group Department of Computer Sciences University of Wisconsin Madison http://www.cs.wisc.edu/graphics Outline Talk #1: Basics
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
autorob.github.io Inverse Kinematics UM EECS 398/598 - autorob.github.io
 autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
Triangulation: A new algorithm for Inverse Kinematics
 Triangulation: A new algorithm for Inverse Kinematics R. Müller-Cajar 1, R. Mukundan 1, 1 University of Canterbury, Dept. Computer Science & Software Engineering. Email: rdc32@student.canterbury.ac.nz
Triangulation: A new algorithm for Inverse Kinematics R. Müller-Cajar 1, R. Mukundan 1, 1 University of Canterbury, Dept. Computer Science & Software Engineering. Email: rdc32@student.canterbury.ac.nz
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
CSE452 Computer Graphics
 CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
Chapter 5.2 Character Animation
 Chapter 5.2 Character Animation Overview Fundamental Concepts Animation Storage Playing Animations Blending Animations Motion Extraction Mesh Deformation Inverse Kinematics Attachments & Collision Detection
Chapter 5.2 Character Animation Overview Fundamental Concepts Animation Storage Playing Animations Blending Animations Motion Extraction Mesh Deformation Inverse Kinematics Attachments & Collision Detection
Motion Control Methods for Skeleton Daniel Thalmann
 Motion Control Methods for Skeleton Daniel Thalmann Cagliari, May 2008 Animation of articulated bodies Characters, humans, animals, robots. Characterized by hierarchical structure: skeleton. Skeleton:
Motion Control Methods for Skeleton Daniel Thalmann Cagliari, May 2008 Animation of articulated bodies Characters, humans, animals, robots. Characterized by hierarchical structure: skeleton. Skeleton:
CS 4620 Program #2: Character Animation
 Cornell University CS 4620 Program #2: Character Animation Forward and Inverse Kinematics out: Tuesday 28 September 2010 due: Tuesday 19 October 2010 Author: Prof. Doug James In this second programming
Cornell University CS 4620 Program #2: Character Animation Forward and Inverse Kinematics out: Tuesday 28 September 2010 due: Tuesday 19 October 2010 Author: Prof. Doug James In this second programming
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Robotics I. March 27, 2018
 Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Animation Lecture 10 Slide Fall 2003
 Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Inverse Kinematics II and Motion Capture
 Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Computer Animation. Algorithms and Techniques. z< MORGAN KAUFMANN PUBLISHERS. Rick Parent Ohio State University AN IMPRINT OF ELSEVIER SCIENCE
 Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
CS 231. Inverse Kinematics Intro to Motion Capture
 CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
Computer Animation II
 Computer Animation II Orientation interpolation Dynamics Some slides courtesy of Leonard McMillan and Jovan Popovic Lecture 13 6.837 Fall 2002 Interpolation Review from Thursday Splines Articulated bodies
Computer Animation II Orientation interpolation Dynamics Some slides courtesy of Leonard McMillan and Jovan Popovic Lecture 13 6.837 Fall 2002 Interpolation Review from Thursday Splines Articulated bodies
Animation. Computer Graphics COMP 770 (236) Spring Instructor: Brandon Lloyd 4/23/07 1
 Spring Instructor: Brandon Lloyd 4/23/07 1") Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
Modeling Physically Simulated Characters with Motion Networks
 In Proceedings of Motion In Games (MIG), Rennes, France, 2012 Modeling Physically Simulated Characters with Motion Networks Robert Backman and Marcelo Kallmann University of California Merced Abstract.
In Proceedings of Motion In Games (MIG), Rennes, France, 2012 Modeling Physically Simulated Characters with Motion Networks Robert Backman and Marcelo Kallmann University of California Merced Abstract.
Kinematics: Intro. Kinematics is study of motion
 Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
2. Motion Analysis - Sim-Mechanics
 2 Motion Analysis - Sim-Mechanics Figure 1 - The RR manipulator frames The following table tabulates the summary of different types of analysis that is performed for the RR manipulator introduced in the
2 Motion Analysis - Sim-Mechanics Figure 1 - The RR manipulator frames The following table tabulates the summary of different types of analysis that is performed for the RR manipulator introduced in the
Human body animation. Computer Animation. Human Body Animation. Skeletal Animation
 Computer Animation Aitor Rovira March 2010 Human body animation Based on slides by Marco Gillies Human Body Animation Skeletal Animation Skeletal Animation (FK, IK) Motion Capture Motion Editing (retargeting,
Computer Animation Aitor Rovira March 2010 Human body animation Based on slides by Marco Gillies Human Body Animation Skeletal Animation Skeletal Animation (FK, IK) Motion Capture Motion Editing (retargeting,
Ragdoll Physics. Abstract. 2 Background. 1 Introduction. Gabe Mulley, Matt Bittarelli. April 25th, Previous Work
 Ragdoll Physics Gabe Mulley, Matt Bittarelli April 25th, 2007 Abstract The goal of this project was to create a real-time, interactive, and above all, stable, ragdoll physics simulation. This simulation
Ragdoll Physics Gabe Mulley, Matt Bittarelli April 25th, 2007 Abstract The goal of this project was to create a real-time, interactive, and above all, stable, ragdoll physics simulation. This simulation
Jacobians. 6.1 Linearized Kinematics. Y: = k2( e6)
") Jacobians 6.1 Linearized Kinematics In previous chapters we have seen how kinematics relates the joint angles to the position and orientation of the robot's endeffector. This means that, for a serial robot,
Jacobians 6.1 Linearized Kinematics In previous chapters we have seen how kinematics relates the joint angles to the position and orientation of the robot's endeffector. This means that, for a serial robot,
COMP30019 Graphics and Interaction Kinematics
 COMP30019 Graphics and Interaction Kinematics Department of Computing and Information Systems The Lecture outline Introduction Forward kinematics Inverse kinematics Kinematics I am robot (am I?) Forward
COMP30019 Graphics and Interaction Kinematics Department of Computing and Information Systems The Lecture outline Introduction Forward kinematics Inverse kinematics Kinematics I am robot (am I?) Forward
Animations. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Kavita Bala
 Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Controlling Reactive, Motion Capture-driven Simulated Characters
 Controlling Reactive, Motion Capture-driven Simulated Characters Victor B. Zordan University of California at Riverside Motion capture-driven simulations? Motivation: Unreal Havok Havok2 Motion capture
Controlling Reactive, Motion Capture-driven Simulated Characters Victor B. Zordan University of California at Riverside Motion capture-driven simulations? Motivation: Unreal Havok Havok2 Motion capture
Computer Animation Fundamentals. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics
 Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Over-determinate Kinematic Analysis
 The webcast will start in a few minutes. Over-determinate Kinematic Analysis FOR M USCULOSKELETAL M ODELING Date 14 th 2017 Outline General introduction to the modeling system The math over-determinate
The webcast will start in a few minutes. Over-determinate Kinematic Analysis FOR M USCULOSKELETAL M ODELING Date 14 th 2017 Outline General introduction to the modeling system The math over-determinate
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Humanoid Robots 2: Dynamic Modeling
 Autonomous and Mobile Robotics rof. Giuseppe Oriolo Humanoid Robots 2: Dynamic Modeling modeling multi-body free floating complete model m j I j R j ω j f c j O z y x p ZM conceptual models for walking/balancing
Autonomous and Mobile Robotics rof. Giuseppe Oriolo Humanoid Robots 2: Dynamic Modeling modeling multi-body free floating complete model m j I j R j ω j f c j O z y x p ZM conceptual models for walking/balancing
Lecture 18 Kinematic Chains
 CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
Kinematics. Why inverse? The study of motion without regard to the forces that cause it. Forward kinematics. Inverse kinematics
 Kinematics Inverse kinematics The study of motion without regard to the forces that cause it Forward kinematics Given a joint configuration, what is the osition of an end oint on the structure? Inverse
Kinematics Inverse kinematics The study of motion without regard to the forces that cause it Forward kinematics Given a joint configuration, what is the osition of an end oint on the structure? Inverse
Kinematics and Orientations
 Kinematics and Orientations Hierarchies Forward Kinematics Transformations (review) Euler angles Quaternions Yaw and evaluation function for assignment 2 Building a character Just translate, rotate, and
Kinematics and Orientations Hierarchies Forward Kinematics Transformations (review) Euler angles Quaternions Yaw and evaluation function for assignment 2 Building a character Just translate, rotate, and
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Why animate humans? Why is this hard? Aspects of the Problem. These lectures. Animation Apreciation 101
 Animation by Example Lecture 1: Introduction, Human Representation Michael Gleicher University of Wisconsin- Madison www.cs.wisc.edu/~gleicher www.cs.wisc.edu/graphics Why animate humans? Movies Television
Animation by Example Lecture 1: Introduction, Human Representation Michael Gleicher University of Wisconsin- Madison www.cs.wisc.edu/~gleicher www.cs.wisc.edu/graphics Why animate humans? Movies Television
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
ROSE-HULMAN INSTITUTE OF TECHNOLOGY
 Introduction to Working Model Welcome to Working Model! What is Working Model? It's an advanced 2-dimensional motion simulation package with sophisticated editing capabilities. It allows you to build and
Introduction to Working Model Welcome to Working Model! What is Working Model? It's an advanced 2-dimensional motion simulation package with sophisticated editing capabilities. It allows you to build and
Serial Manipulator Statics. Robotics. Serial Manipulator Statics. Vladimír Smutný
 Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING. Dr. Stephen Bruder NMT EE 589 & UNM ME 482/582
 ROBOT ENGINEERING Dr. Stephen Bruder Course Information Robot Engineering Classroom UNM: Woodward Hall room 147 NMT: Cramer 123 Schedule Tue/Thur 8:00 9:15am Office Hours UNM: After class 10am Email bruder@aptec.com
ROBOT ENGINEERING Dr. Stephen Bruder Course Information Robot Engineering Classroom UNM: Woodward Hall room 147 NMT: Cramer 123 Schedule Tue/Thur 8:00 9:15am Office Hours UNM: After class 10am Email bruder@aptec.com
Simulation. x i. x i+1. degrees of freedom equations of motion. Newtonian laws gravity. ground contact forces
 Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Lecture 2: Kinematics of medical robotics
 ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Kinematic Synthesis. October 6, 2015 Mark Plecnik
 Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
02/22/02. Assignment 1 on the web page: Announcements. Test login procedure NOW!
 Announcements Assignment on the web page: www.cs.cmu.edu/~jkh/anim_class.html est login procedure NOW! 0//0 Forward and Inverse Kinematics Parent: Chapter 4. Girard and Maciejewski 985 Zhao and Badler
Announcements Assignment on the web page: www.cs.cmu.edu/~jkh/anim_class.html est login procedure NOW! 0//0 Forward and Inverse Kinematics Parent: Chapter 4. Girard and Maciejewski 985 Zhao and Badler
MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC. Alexandre Meyer Master Informatique
 1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Overview: Motion data processing In this course Motion editing
1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Overview: Motion data processing In this course Motion editing
The University of Missouri - Columbia Electrical & Computer Engineering Department EE4330 Robotic Control and Intelligence
 The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a