Patch-based Non-rigid 3D Reconstruction from a Single Depth Stream
|
|
|
- Homer Warren
- 5 years ago
- Views:
Transcription

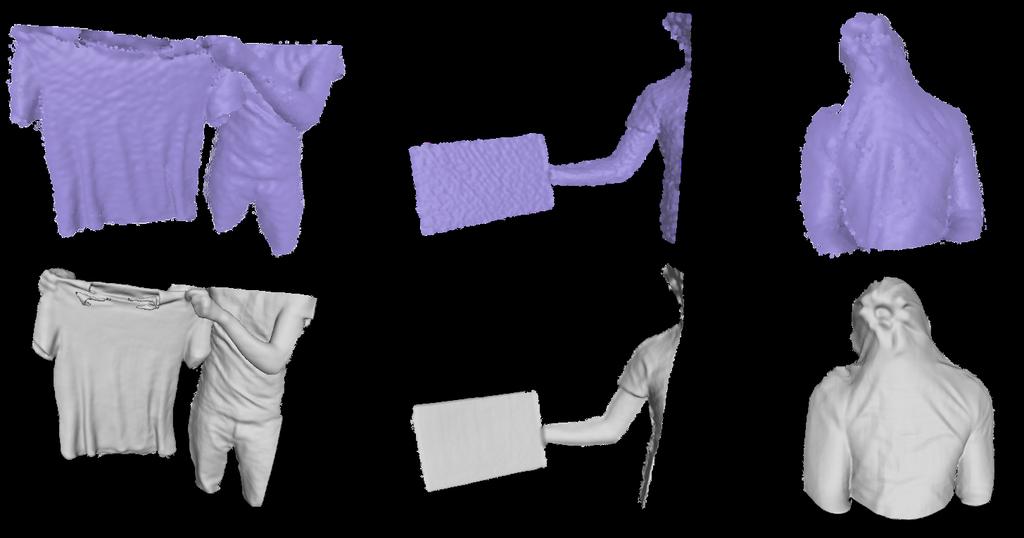
1 Patch-based Non-rigid 3D Reconstruction from a Single Depth Stream Carmel Kozlov Miroslava Slavcheva Slobodan Ilic Technische Universität München Siemens Corporate Technology Abstract We propose an approach for 3D reconstruction and tracking of dynamic surfaces using a single depth sensor, without any prior knowledge of the scene. It is robust to rapid inter-frame motions due to the probabilistic expectation-maximization non-rigid registration framework. Our pipeline subdivides each input depth image into non-rigidly connected surface patches, and deforms it towards the canonical pose by estimating a rigid transformation for each patch. The combination of a data term imposing similarity between model and data, and a regularizer enforcing as-rigid-as-possible motion of neighboring patches ensures that we can handle large deformations, while coping with sensor noise. We employ a surfelbased fusion technique, which lets us circumvent the repeated conversion between mesh and signed distance field representations which are used by related techniques. Furthermore, a robust keyframe-based scheme allows us to keep track of correspondences throughout the entire sequence. Through a variety of qualitative and quantitative experiments, we demonstrate resistance to larger motion and achieving lower reconstruction errors than related approaches. 1. Introduction Recently, techniques for non-rigid scene reconstruction have seen increased attention due to advancements in the virtual and augmented reality domains [38]. Considerable efforts have been devoted in both academia and industry to develop robust dynamic reconstruction and tracking algorithms using specialized mutli-view systems [8, 34, 5, 19, 10]. However, the rise of commodity RGB-D sensors has inspired a new wave of development, as their portability allows capture outside of the studio setting, which is more easily accessible to the general user. Despite significant progress [23, 11, 16, 27, 15], most methods are limited to very contrived motions, leaving accurate dynamic scene capture a challenging open problem. As objects deform freely and the acquisition process is unreliable, includ- Figure 1. Given a single depth stream, we divide each frame into surface patches and deform it towards a canonical pose using a non-rigid deformation framework. Despite noisy data and occlusions we are able to obtain a 3D model of the deforming object, shown on the right hand side. The RGB images here are used for visualization purposes only. ing noisy data and occlusions, this problem involves a large number of parameters and is highly underconstrained. The first method to achieve single-stream dynamic reconstruction was DynamicFusion [23], which devised a way to simultaneously track and reconstruct a deforming surface in real time. However, this method failed to reconstruct tangential motion and suffered from drift. More recently, VolumeDeform [16] incorporated the use of color SIFT features to enhance the handling of tangential motion. However, this method was still limited to slow inter-frame motions. Recent works such as the approach of Dou et al. [11] showed impressive results, yet they were computationally intensive, rendering them impractical to the average user. In this paper, we aim for a balanced solution that is computationally reasonable, handles drift and fast interframe motions, and does not require prior knowledge of the scene. Our key idea is using rigidity constraints between surface patches to enable non-rigid deformation under fast inter-frame motion. In particular, we split the depth data into patches and back-project to a 3D point cloud, as illustrated in Figure 1. These patches impose rigidity constraints on their neighbors, such that they deform within a 1
2 locally rigid neighborhood. Each depth frame is deformed towards a canonical pose under a probabilistic expectationmaximization variant of non-rigid iterative closest point (ICP) [1]. Patch based representations have been explored for multi-view reconstruction [4, 3], but partial views, high occlusions and noisy data make their use challenging for the single-view setting. To enable the use of patch-based representation and to handle lengthy sequences we leverage the idea of keyframes [10, 6]. To obtain the final 3D reconstruction, we fuse all the models obtained from our keyframes, using the correspondence information tracked through the entire sequence. To summarize, the contributions of our paper are: We incorporate patch-rigidity constraints for single stream depth-based 3D reconstruction, which allows our method to work for arbitrary shapes and to be robust to fast motions. Our method uses a surfel-based representation for both the deformation estimation as well as the fusion framework in a single-stream depth setting. We demonstrate that our method has the ability to cope with larger movements compared to previous works, while achieving lower reconstruction errors. 2. Related Work While reconstructing a static scene entails only estimating the 6 degrees-of-freedom camera pose, dynamic scenes pose a significantly more challenging task as each point may have a different motion [13]. In this section we first discuss approaches that address the dynamic reconstruction problem but require a multi-view setting or are conditioned on prior knowledge of the scene. Next, we review state-of-theart work on single-stream dynamic reconstruction, the exact setting we are tackling. Finally, we discuss approaches employing a patch-based representation, from which we draw inspiration for our proposed methodology. Multi-view Reconstruction: Mutli-view setups decrease the underconstrained nature of this problem, as multiple cameras provide more data, and reduce noise and occlusions significantly. Early methods in this domain [8, 34, 4] required many hours of processing, as well as the installation and calibration of many high-quality cameras making them non-practical for everyday use. While more recent methods [19, 10] performed significantly better, they still required a great amount of processing time and the studio setting severely limited their application. Recently, Fusion4D [10] and Motion2Fusion [9] have demonstrated compelling results, but both required multiple depth cameras, each with a dedicated GPU. Such specialized setups are not available to the general public. In contrast to these approaches, our method focuses on the single-stream case which vastly reduces computational time. Additionally, the use of portable commodity hardware allows anyone to use our approach and enables reconstructions outside the studio setting. Reconstruction using Prior Knowledge: Some methodologies employ the use of prior knowledge to constrain the problem. Zollhöfer et al. [37] deformed a rigidly acquired template to each new depth frame. Both the work of Yu et al. [35] and Liu et al. [21] showed promising results using a single RGB-D stream, but first required generating a template of the object in a static pose. Templates allow subject-specific reconstruction only, and may not be straightforward to acquire, especially for some subjects such as animals and children. Alternative frameworks employed different prior knowledge on the class of reconstructed objects, such as parametric human shape [2], hand [30] and face models [31] or skeletons [14], which prevented the capture of arbitrary surfaces. Other systems that are less technically demanding combine prior knowledge and a multi-view system. This can be achieved by obtaining an input mesh from a multi-vew system and then deforming a template to it [33, 4]. In contrast, our approach can work on arbitrary shapes and does not require prior knowledge of the scene. Single-stream Dynamic Reconstruction: The rise of single-stream non-rigid capture started with the seminal DynamicFusion method [23], which was able to incrementally track and reconstruct a non-rigid scene in real-time using dense depth-based correspondences. However, their method was prone to drift, unable to handle tangential motions, and limited to highly contrived and slow motions. DynamicFusion inspired a line of follow-up work [16, 15], but all techniques have only demonstrated results on relatively slow and controlled movements. VolumeDeform [16] added color SIFT features to better handle tangential movement, yet it was still unable to handle fast inter-frame motions. In comparison, our method offers a unique way to handle fast movements through a patch-based deformation framework. KillingFusion [27] proposed a solution handling larger motion and topological changes, using a deformation field operating purely over a signed distance field (SDF). While it performed favorably, it lacked data association, severely limiting the range of possible applications such as character animation. In contrast, our method stays in one data representation which allows for correspondence tracking throughout the entire sequence used for reconstruction. Recently, Guo et al. [15] incorporated surface albedo constraints in order to capture surfaces of uniform geometry. BodyFusion [36] focused on reconstructing humans by adding motion priors and solved for the skeleton and graphnode deformations simultaneously. However, these two methods suffered from drift and performed poorly under

3 Figure 2. Our proposed pipeline. The reconstruction process is incremental; each frame is patched and back-projected. We divide the sequence into keyframes, in each we build a local incremental model. We obtain the final reconstruction using a correspondence-based global fusion approach. fast inter-frame motions. To combat drift, Dou et al. [11] employed non-rigid bundle adjustment to automatically detect loop closures. They demonstrated high quality results, but required hours of processing and they were still unable to fully handle rapid movements. We aim to handle drift by the use of a keyframe-based approach which eliminates the use of bundle-adjustment based techniques and speeds up the reconstruction pipeline. Patch-based Representations: Patch-based representations have been proposed for the problem of non-rigid structure from motion [25, 7]. The work of Varol et al. [32] calculated homographies between corresponding planar patches from a short image sequence. This enabled reconstruction of textured deformable surfaces. Similarly, Agapito et al. [12] reconstructed strongly deforming objects, such as a waving flag, by dividing the surface into overlapping patches and reconstructing each of these inidvidually to obtain a final 3D model. Recent works in nonrigid structure from motion (NRSfM) such as the work of Ji et al. [18] have shown more accurate results than previous state-of-the-art methods for non-rigid shape reconstruction. The patch-based method of Cagniart et al. [3] has been particularly successful in the multi-view tracking setting, as it splits the surface into non-rigidly connected rigid patches, which can withstand noise and occlusions. We also adopt a patch-based representation for our approach, but we couple it with a keyframe-based framework to address problems of the single-view sensor setting, i.e., partial views, noisy data and occlusions. 3. Proposed Method Our framework reconstructs a 3D model of a dynamic object, as illustrated in Figure 2. The method keeps track of correspondences throughout the sequence allowing for fast inter-frame motions. The most crucial aspect of our pipeline is the use of a patch-based surface representation, enabling us to deform incoming frames non-rigidly onto a growing model. The reconstruction process is incremental; each frame is patched ( 3.1) and deformed onto a growing model using a deformation framework ( 3.2). We use a surfel-based representation for the data, which enables us to fuse new geometry onto the model easily ( 3.3). The idea of patch-based representation has been used before in multi-view reconstruction and tracking [4]. The key to enabling this for single-stream 3D reconstruction is the incorporation of keyframes into our approach ( 3.4). This is accomplished by dividing the sequence of depth images into keyframes, which hold F consecutive frames, in each we build a local incremental model. Finally, we fuse all the models to obtain a global model of the deforming object ( 3.5). As we use a surfel-based representation, we provide a quick overview of our visualization approach ( 3.6) Surface Patching Our patching approach constructs roughly equally sized patches distributed uniformly on the object surface. The patching is computed directly on each incoming depth frame, as depicted in Figure 3, allowing us to propagate the patch information for each point when projected to 3D. We employ a superpixel approach for the patch generation, based on the mask Simple Linear Iterative Clustering (maskslic) [17] algorithm. In certain situations the mask of the object is complex, containing holes or disparate features, which makes it possible to generate disconnected patches. These detached patches may contain regions on the surface object, which deform non-rigidly to different locations. We show an example of detached patches in Figure 3. Finally, we ensure that detached patches are split, such that the deformation framework is not adversely affected by such patches Patch-based Deformation Framework We employ a patch-based surface rigidity deformation framework, inspired from [4], to compute the non-rigid deformations of each frame with respect to the canonical pose.


4 Patching Splitting Detached Patches Figure 3. The patching, depicted on the left, is accomplished by placing seeds and clustering all pixels to a nearest seed location. Patches which are detached due to disparate features, as illustrated on the right hand side, are split to ensure they can deform non-rigid to their respective locations. On the top row we show the output from the patching framework before applying the last step of splitting the detached patches. On the bottom row we show the additional patches that are created to split the detached patches. The surface of an object X = (X) is represented in 3D coordinates, where X = {x v } V v=1 R 3 are the positions of all its points. The task of the deformation framework is to register the points of the incoming frame X to the canonical pose Y. With each incoming depth frame, we deform the frame onto the reference model and integrate the new geometry. Patch Parameterization. Once the surface patching is completed on a frame, the depth data is back-projected into a point cloud. A rigid transformation with respect to the world coordinates is associated with each patch P k, parameterized by the position of the patch center c k and a rotation matrix R k. The rigid transformation for each point x k can be computed as follows: x k = R k (x c k ) + c k, (1) The parameters representing each patch Θ = {θ k } k=1:k are combined into a vector Θ = {R k, c k } k=1:np, describing the entire surface. N p describes the number of patches on the surface. The framework computes one rigid transformation per patch, while the motion of each vertex is computed using linear blending from the patch center. A gaussian weighting function, α k is employed in the blending, and the position for a point x k is computed using the patch and its direct neighbors k N k : x = α s x s. (2) s k N k Deformation Framework. Given an observed point cloud X = (X) where Y = (Y) is the canonical pose, we register X to Y, estimating ˆΘ such that X( ˆΘ) resembles Y as closely as possible. This is accomplished in a two-part process. First, each point in Y is associated with a point in X to build a correspondence set C. Next, ˆΘ is estimated by minimizing an energy E which describes the discrepancy between each pair association from the first step C : ˆΘ = arg min Θ E(Θ; C). Assuming that Y and X(Θ) lie near to each other, the correspondence set C is built with a nearest-neighbor search. A deformation parameter Θ is initialized and X(Θ) is transformed accordingly. We then evaluate a new correspondence set C for X(Θ), and the process repeats until convergence. This iterative approach is accomplished with a variant of non-rigid ICP [1]. Energy Definition. We utilize an energy formulation combining a data term E data, which enforces the deformed cloud to be aligned with the reference model, and a regularization term E r, which imposes as-rigid-as-possible constrains between neighboring patches. Given a correspondence set C, where each patch i in the input cloud is associated with a point p on the target, we formulate the data term as: E data (Θ; C) = w i,p y i x p (Θ) 2 2, (3) (i,p C) where each correspondence pair is associated with a weight w i,p. Given two neighboring patches k and l N k, the rigidity energy enforces the predictions x k (v) and x l (v) of a vertex point v to be consistent: E r (Θ) = K k=1 l N k v P k P l w kl (v) x k (v) x l (v) 2, (4) where the weights w kl (v) encode a property of uniform stiffness. These are computed and normalized proportionally to the sum of the blending weights from Equation 2 for each patch and its neighbors. Our final energy is defined as: arg min Θ E(Θ) = arg min E data (X(Θ)) + λ r E r (Θ). (5) Θ EM-ICP. To minimize the above energy we model the problem in a Bayesian context and employ Expectation- Maximization (EM) for MAP estimation [4]. This formulation is robust to outliers in the canonical model, reducing
5 the overall error accumulation as well as reducing drift. Additionally, it is robust to noise and missing data in incoming depth frames Surfel-based Fusion Our surfel representation is based on [20], and the surfels of a point cloud are represented as a set of points P k, each associated with a position v k R 3, a normal n k R 3, a confidence c k R, and a timestamp t k R. The deformation framework produces a deformed point cloud with associated normals of an incoming depth frame with respect to its keyframe model. The deformed point cloud must be integrated into this model. As we use a surfel-based representation, we do not need to switch to a different data representation (e.g., DynamicFusion [23] requires constant conversions between a point cloud representation and an SDF). When averaging points, we use correspondences within a pre-defined radius δ near. If the correspondence of the point from the deformed point cloud and the model are within this radius, we average them together with the same averaging scheme as in [20]. Any point from the deformed point cloud which does not have a correspondence and is not outside of a radius δ far, is added to the model as new geometry. Points which are outside of the bounding radius δ far are discarded, as they are most likely outliers or artifacts from sensor noise. To further eliminate noise, we remove points with a low confidence (c k < c stable ) after a time interval t max. We choose c stable = 10 and compute the confidence in the same manner as in [20] Keyframes We propose a Keyframes-based scheme similar to [10], outlined in Figure 2, which enables us to handle lengthy sequences such as a human turning. This approach consists of dividing the entire sequence into keyframes, holding F frames each, and using correspondences-based fusion to obtain the final reconstruction. Following the initialization of the first keyframe, we process all the frames incrementally. We use the initial frame in the first keyframe to initialize the model. We perform surface-patching on each subsequent frame and deform it non-rigidly using the EM- ICP deformation framework onto the local keyframe model. New geometry is fused into the model using surfel-based fusion ( 3.3). At the end of each keyframe, the last output from the deformation framework initializes the model for the next keyframe, which helps to combat drift and allows us to establish correspondences throughout the entire sequence. This is accomplished due to our surfel-based representation. The pipeline generates a model for each keyframe, all of which are fused at the end of the sequence to form a final global model. Each depth frame is surface patched ( 3.1) and backprojected into a 3D point cloud, stored using a surfel-based representation. Consistent with prior work [27], we estimate the rigid motion of the camera employing a fully volumetric approach [28], enabling our method to work on sequences with free camera motion. We obtain the deformed point cloud after warping the incoming frame through the EM-ICP framework with respect to the current keyframe model. We fuse this output ( 3.3) into the current keyframe model. If a frame is the last one in a keyframe, the deformed point cloud from the deformation framework for that frame is fused into the keyframe model and is additionally used to initialize the next keyframe model. To obtain the final global model, all keyframes are fused together ( 3.5) using a global correspondence-based approach. This fusion approach is particularly advantageous for our deformation framework and allows us to track correspondences throughout the entire sequence Global Correspondence-based Fusion To obtain the final reconstruction all keyframe models must be fused together. Contrary to [10], we can accomplish this without switching data representations by fusing the keyframes together using keyframe-correspondences. We track correspondences between frames and propagate these between each keyframe; when the last deformation of a keyframe is obtained, it is used to initialize the next keyframe model and the correspondences are propagated as well. Other keyframe-based methods, such as [36, 9], cannot track correspondences and must instantiate a new volume for each new keyframe without any associations between them. The global correspondence-based fusion is done as the last step of the proposed method. Starting at the last model generated, the corresponding surfels between the last keyframe model and its predecessor are fused, while noncorresponding surfels are added as new geometry of the global model. This process is repeated, fusing all preceding models onto the growing global model. Furthermore, the global correspondence-based fusion enables us to obtain accurate results for lengthy sequences while reducing drift and eliminating the need for complicated constraints such as bundle-adjustment. The correspondences found between each keyframe are averaged with the same surfelbased scheme as outlined in 3.3. For all new points without correspondences we add them to the global model as new geometry Visualization The surfel-based representation consists of point primitives containing no connectivity [24]. As such, we employ a surface splatting approach similar to [39] for visualization. This is an advantage compared to other approaches in non-rigid monocular reconstruction, which switch data representations to an SDF, where visualization is extracted

![Our proposed method achieves full loop reconstructions without using any explicit loop closure detection methods. through ray tracing or marching cubes [22].](/docs-images/89/97709020/images/6-1.jpg "In contrast, our approach allows us to stay in one representation and is less prone to data loss through data representation switching. timization.")

 takes on average 2 seconds for the entire sequence.")
6 Figure 4. Patch-based non-rigid reconstruction results on several non-rigid sequences. Each sequence contains natural dynamic movements of a human such as swaying from side to side, leg movements, and head tilting. Our proposed method achieves full loop reconstructions without using any explicit loop closure detection methods. through ray tracing or marching cubes [22]. In contrast, our approach allows us to stay in one representation and is less prone to data loss through data representation switching. timization. It may be possible to accelerate the EM-ICP framework using a GPU implementation, but due to the specific nature of our formulation, this is beyond the scope of this paper. 4. Evaluation 4.1. Qualitative Evaluation In this section we present extensive qualitative and quantitative evaluation of our proposed framework, using both publicly available datasets as well as our own acquisitions. As we employ a surfel-based representation, the rendering is completed using surface splatting, as described in 3.6. Our entire pipeline is implemented on commodity hardware. Running on a 2.70GHz i7 CPU, the EM-ICP deformation framework takes 3 seconds per frame on average. Additionally, the final step ( 3.5) takes on average 2 seconds for the entire sequence. This is significantly faster than the non-rigid bundle adjustment scheme of Dou et al. [11], which is the only other related single-stream technique executed on a CPU, taking 30 seconds per frame for pre-processing, together with another 6 hours for joint op- Our Sequences: The experiments on the new sequences captured by us highlight our ability to recover reconstructions of full loops around deformable objects; something not typically demonstrated in comparable approaches. Our method is capable of capturing their geometry with high fidelity by only employing the patch-based rigidity constraints, without explicitly accounting for drift or non-rigid loop closure. Figure 4 depicts three of our own sequences, where a man deforms dynamically while turning. Our framework is able to successfully complete the reconstruction despite motions such as head tilts, back-andforth swaying, and leg and arm movements. Large Inter-frame Motions: Next we demonstrate the ability of our framework to recover rapid motions in chal-

























7 Target Frame (First) Input Frame (Second) Patched Input Frame Input Deformed to Target Figure 5. Ability of our proposed patch-based deformation framework to handle large motions. We manage to successfully warp the input frame towards the target frame despite the large pose difference between them. approach manages to suitably warp the input towards the canonical model despite their large pose difference, demonstrating our method s ability to deform well despite the large movements. Figure 6. Comparison to the non-rigid reconstruction method of VolumeDeform [16]: our approach, illustrated in the top row, achieves similar quality, without switching between data representations. lenging two frame examples, where the deforming object has undergone a large movement. In these two frame sequences, we use the first frame as a target frame and we deform the second frame to match the target frame. This is illustrated in Figure 5, where we show the target frame in the first column, and the input frame in the second. We also provide the patched input frame in the third column. Finally, we render the output of the deformed input frame onto the target frame, illustrated in column four. In all cases our Public Sequences: To further demonstrate the generality of our framework, we evaluate on data from the VolumeDeform paper [16]. Figure 6 depicts the final canonical reconstruction for several sequences. Our method achieves results of similar quality. Moreover, we do not need to switch between data representations, unlike VolumeDeform which stores the scene geometry in an SDF, while estimating correspondences via mesh rendering. As the SDF resolution may significantly reduce the spatial extents that can be reconstructed, while a marching cubes rendering to extract a mesh can be very computationally expensive, we identify the use of a single data representation as one of our main contributions. Furthermore, we test on full loop sequences from other authors, namely the AndrewChair sequence from Dou et al. [11]. Our result is shown in Figure 7, which once again demonstrates the ability of our framework to reconstruct subjects after long loopy sequences without explicit loop closure detection.
![Figure 7. Comparison to the non-rigid bundle adjustment method of Dou et al. [11].](/docs-images/89/97709020/images/8-0.jpg "Our method, illustrated in the top row, is able to reconstruct the dynamic sequence without employing any loop closure methodologies, preserving features such as garment folds.")



![896mm of KillingFusion, and the average error for Snoopy was 3.423mm compared to 3.543mm of KillingFusion. Lastly, we ran our framework against the BodyFu- sion [36] Vicon markers.](/docs-images/89/97709020/images/8-4.jpg "For the YT sequence we report an average global error of 2.3cm, using 20 frames in each keyframe and 70 patches. This compares favourably to the average error of 4.4cm of DynamicFusion [23] and 3.")
![7cm of VolumeDeform [16]. BodyFusion [36] reports a lower error of 2.](/docs-images/89/97709020/images/8-5.jpg "2cm, but they require skeleton-based priors to reduce the ambiguities of the deformation parameters, while our method does not involve the use of priors.")

![purely SDF-based approaches like KillingFusion [27] which completely lacks correspondence information. 5.](/docs-images/89/97709020/images/8-9.jpg "Conclusions and Future Work We have presented a novel non-rigid 3D reconstruction scheme that robustly captures rapid inter-frame motions from a single depth stream relying on patch-based rigidity")
8 Figure 7. Comparison to the non-rigid bundle adjustment method of Dou et al. [11]. Our method, illustrated in the top row, is able to reconstruct the dynamic sequence without employing any loop closure methodologies, preserving features such as garment folds. We manage to accurately reconstruct small features (which may appear noisy due to the surfel-based visualization, e.g the nose.) Ground Truth Error Render Average error: 3.627mm Average error: 3.423mm Figure 8. Non-rigid reconstruction of the Duck and Snoopy sequences from the KillingFusion dataset [27]. Our method reconstructs the sequences with a smaller error margin Quantitative Evaluation Quantitative evaluation for dynamic 3D reconstruction is difficult, as ground truth data is typically not available. Nevertheless, to assess the geometric accuracy of our framework we test it on publicly available datasets for which quantitative evaluation is possible. First, we evaluate on the Deformable 3D Reconstruction Dataset from KillingFusion [27], as their approach also targets fast motions. We selected the Duck and Snoopy sequences, as they are the only two that have the ground truth models available. Our final reconstructions are displayed in Figure 8. We achieve smaller geometric error than the KillingFusion method for both sequences. Our average error for the Duck was 3.657mm compared to 3.896mm of KillingFusion, and the average error for Snoopy was 3.423mm compared to 3.543mm of KillingFusion. Lastly, we ran our framework against the BodyFu- sion [36] Vicon markers. For the YT sequence we report an average global error of 2.3cm, using 20 frames in each keyframe and 70 patches. This compares favourably to the average error of 4.4cm of DynamicFusion [23] and 3.7cm of VolumeDeform [16]. BodyFusion [36] reports a lower error of 2.2cm, but they require skeleton-based priors to reduce the ambiguities of the deformation parameters, while our method does not involve the use of priors. Therefore, our patch-based method manages to track correspondences with high accuracy under fast motions. This is an advantage of our approach compared to other keyframe-based techniques [10, 9] which instantiate a new volume for every keyframe and lose data association between keyframes, and compared to purely SDF-based approaches like KillingFusion [27] which completely lacks correspondence information. 5. Conclusions and Future Work We have presented a novel non-rigid 3D reconstruction scheme that robustly captures rapid inter-frame motions from a single depth stream relying on patch-based rigidity constraints in a probabilistic deformation framework. A variety of qualitative experiments has demonstrated these capabilities of our method, while quantitative comparisons have shown that we achieve lower reconstruction and tracking errors than state-of-the-art techniques [27]. Furthermore, our surfel-based fusion allows us to stay within one representation, while other approaches require constant conversion between meshes and SDFs, which both impedes their speed and limits the volume of space that they can reconstruct. As the current trend in related methods is the use of specialized hardware systems, we believe that the proposed lighter-weight solution, together with the use of a single representation, will offer a different avenue for further research that will make the capture of dynamic 3D scenes more accessible to the general public. In future work, we plan to make use of the available RGB images as well, and incorporate additional constraints, such as SIFT features [16] or surface albedo terms [15], so that drift can be further reduced. Additionally, explicit loop closure detection can aid in capturing longer sequences, but it is a very challenging problem in a non subject-specific setting [26]. Finally, as the computational bottleneck of our approach is the EM-ICP computation, we will investigate how to adapt existing ways of parallelizing it on the GPU [29] for our particular variation. References [1] P. J. Besl and N. D. McKay. Method for registration of 3-D shapes. In Sensor Fusion IV: Control Paradigms and Data Structures, volume 1611, pages International Society for Optics and Photonics, 1992.
9 [2] F. Bogo, M. J. Black, M. Loper, and J. Romero. Detailed full-body reconstructions of moving people from monocular RGB-D sequences. In IEEE International Conference on Computer Vision (ICCV), [3] C. Cagniart, E. Boyer, and S. Ilic. Free-form mesh tracking: A patch-based approach. In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [4] C. Cagniart, E. Boyer, and S. Ilic. Probabilistic deformable surface tracking from multiple videos. In European Conference on Computer Vision (ECCV), pages Springer, [5] A. Collet, M. Chuang, P. Sweeney, D. Gillett, D. Evseev, D. Calabrese, H. Hoppe, A. Kirk, and S. Sullivan. Highquality streamable free-viewpoint video. ACM Transactions on Graphics (TOG), 34(4), [6] A. Collet, M. Chuang, P. Sweeney, D. Gillett, D. Evseev, D. Calabrese, H. Hoppe, A. Kirk, and S. Sullivan. Highquality streamable free-viewpoint video. ACM Transactions on Graphics (TOG), 34(4):69, [7] T. Collins and A. Bartoli. Locally affine and planar deformable surface reconstruction from video. In International Workshop on Vision, Modeling and Visualization, pages , [8] E. de Aguiar, C. Stoll, C. Theobalt, N. Ahmed, H. Seidel, and S. Thrun. Performance capture from sparse multi-view video. ACM Transactions on Graphics (TOG), 27(3), [9] M. Dou, P. Davidson, S. R. Fanello, S. Khamis, A. Kowdle, C. Rhemann, V. Tankovich, and S. Izadi. Motion2Fusion: Real-time volumetric performance capture. In ACM Transactions on Graphics (TOG), [10] M. Dou, S. Khamis, Y. Degtyarev, P. Davidson, S. R. Fanello, A. Kowdle, S. O. Escolano, C. Rhemann, D. Kim, J. Taylor, et al. Fusion4D: Real-time performance capture of challenging scenes. ACM Transactions on Graphics (TOG), 35(4):114, [11] M. Dou, J. Taylor, H. Fuchs, A. Fitzgibbon, and S. Izadi. 3D scanning deformable objects with a single RGBD sensor. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [12] J. Fayad, L. Agapito, and A. Del Bue. Piecewise quadratic reconstruction of non-rigid surfaces from monocular sequences. In European Conference on Computer Vision (ECCV), pages Springer, [13] K. Fujiwara, K. Nishino, J. Takamatsu, B. Zheng, and K. Ikeuchi. Locally rigid globally non-rigid surface registration. In Computer Vision (ICCV), 2011 IEEE International Conference on, pages IEEE, [14] J. Gall, C. Stoll, E. de Aguiar, C. Theobalt, B. Rosenhahn, and H. P. Seidel. Motion capture using joint skeleton tracking and surface estimation. In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [15] K. Guo, F. Xu, T. Yu, X. Liu, Q. Dai, and Y. Liu. Realtime geometry, albedo and motion reconstruction using a single RGB-D camera. ACM Transactions on Graphics (TOG), [16] M. Innmann, M. Zollhöfer, M. Nießner, C. Theobalt, and M. Stamminger. VolumeDeform: Real-time volumetric nonrigid reconstruction. In European Conference on Computer Vision (ECCV), pages Springer, [17] B. Irving, I. A. Popescu, R. Bates, P. D. Allen, A. L. Gomes, P. Kannan, P. Kinchesh, S. Gilchrist, V. Kersemans, S. Smart, et al. maskslic: regional superpixel generation with application to local pathology characterisation in medical images. arxiv preprint arxiv: , [18] P. Ji, H. Li, Y. Dai, and I. D. Reid. maximizing rigidity revisited: A convex programming approach for generic 3d shape reconstruction from multiple perspective views. In ICCV, pages , [19] H. Joo, H. Liu, L. Tan, L. Gui, B. Nabbe, I. Matthews, T. Kanade, S. Nobuhara, and Y. Sheikh. Panoptic studio: A massively multiview system for social motion capture. In Proceedings of the IEEE International Conference on Computer Vision, pages , [20] M. Keller, D. Lefloch, M. Lambers, S. Izadi, T. Weyrich, and A. Kolb. Real-time 3d reconstruction in dynamic scenes using point-based fusion. In 3D Vision-3DV 2013, 2013 International Conference on, pages 1 8. IEEE, [21] Q. Liu-Yin, R. Yu, L. Agapito, A. Fitzgibbon, and C. Russell. Better together: Joint reasoning for non-rigid 3d reconstruction with specularities and shading. arxiv preprint arxiv: , [22] W. E. Lorensen and H. E. Cline. Marching cubes: A high resolution 3D surface construction algorithm. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH 87, pages , [23] R. A. Newcombe, D. Fox, and S. M. Seitz. DynamicFusion: Reconstruction and tracking of non-rigid scenes in real-time. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [24] H. Pfister, M. Zwicker, J. Van Baar, and M. Gross. Surfels: Surface elements as rendering primitives. In Proceedings of the 27th annual conference on Computer graphics and interactive techniques, pages ACM Press/Addison- Wesley Publishing Co., [25] C. Russell, J. Fayad, and L. Agapito. Energy based multiple model fitting for non-rigid structure from motion. In Computer Vision and Pattern Recognition (CVPR), 2011 IEEE Conference on, pages IEEE, [26] T. Schmidt, R. Newcombe, and D. Fox. Self-supervised visual descriptor learning for dense correspondence. IEEE Robotics and Automation Letters, 2(2): , [27] M. Slavcheva, M. Baust, D. Cremers, and S. Ilic. Killingfusion: Non-rigid 3D reconstruction without correspondences. In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), volume 3, page 7, [28] M. Slavcheva, W. Kehl, N. Navab, and S. Ilic. Sdf-2- Sdf: Highly accurate 3D object reconstruction. In European Conference on Computer Vision (ECCV), pages Springer, [29] T. Tamaki, M. Abe, B. Raytchev, and K. Kaneda. Softassign and EM-ICP on GPU. In First International Conference on Networking and Computing, [30] D. J. Tan, T. Cashman, J. Taylor, A. Fitzgibbon, D. Tarlow, S. Khamis, S. Izadi, and J. Shotton. Fits like a glove: Rapid
10 and reliable hand shape personalization. In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [31] J. Thies, M. Zollhöfer, M. Stamminger, C. Theobalt, and M. Nießner. Face2Face: Real-time face capture and reenactment of RGB videos. In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [32] A. Varol, M. Salzmann, E. Tola, and P. Fua. Template-free monocular reconstruction of deformable surfaces. In Computer Vision, 2009 IEEE 12th International Conference on, pages IEEE, [33] D. Vlasic, I. Baran, W. Matusik, and J. Popović. Articulated mesh animation from multi-view silhouettes. ACM Transactions on Graphics (TOG), 27(3), [34] D. Vlasic, P. Peers, I. Baran, P. Debevec, J. Popović, S. Rusinkiewicz, and W. Matusik. Dynamic shape capture using multi-view photometric stereo. ACM Transactions on Graphics (TOG), 28(5), [35] R. Yu, C. Russell, N. D. Campbell, and L. Agapito. Direct, dense, and deformable: Template-based non-rigid 3d reconstruction from rgb video. In Proceedings of the IEEE International Conference on Computer Vision, pages , [36] T. Yu, K. Guo, F. Xu, Y. Dong, Z. Su, J. Zhao, J. Li, Q. Dai, and Y. Liu. BodyFusion: Real-time capture of human motion and surface geometry using a single depth camera. In The IEEE International Conference on Computer Vision (ICCV). ACM, October [37] M. Zollhöfer, M. Nießner, S. Izadi, C. Rhemann, C. Zach, M. Fisher, C. Wu, A. Fitzgibbon, C. Loop, C. Theobalt, and M. Stamminger. Real-time Non-rigid Reconstruction using an RGB-D Camera. ACM Transactions on Graphics (TOG), 33(4), [38] M. Zollhöfer, A. G. Patrick Stotko, C. Theobalt, M. Nießner, R. Klein, and A. Kolb. State of the art on 3D reconstruction with RGB-D cameras [39] M. Zwicker, H. Pfister, J. Van Baar, and M. Gross. Surface splatting. In Proceedings of the 28th annual conference on Computer graphics and interactive techniques, pages ACM, 2001.
Non-rigid Reconstruction with a Single Moving RGB-D Camera
 Non-rigid Reconstruction with a Single Moving RGB-D Camera Shafeeq Elanattil 1,2, Peyman Moghadam 1,2, Sridha Sridharan 2, Clinton Fookes 2, Mark Cox 1 1 Autonomous Systems Laboratory, CSIRO Data61, Brisbane,
Non-rigid Reconstruction with a Single Moving RGB-D Camera Shafeeq Elanattil 1,2, Peyman Moghadam 1,2, Sridha Sridharan 2, Clinton Fookes 2, Mark Cox 1 1 Autonomous Systems Laboratory, CSIRO Data61, Brisbane,
Monocular Tracking and Reconstruction in Non-Rigid Environments
 Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
ArticulatedFusion: Real-time Reconstruction of Motion, Geometry and Segmentation Using a Single Depth Camera
 ArticulatedFusion: Real-time Reconstruction of Motion, Geometry and Segmentation Using a Single Depth Camera Chao Li, Zheheng Zhao, and Xiaohu Guo Department of Computer Science, The University of Texas
ArticulatedFusion: Real-time Reconstruction of Motion, Geometry and Segmentation Using a Single Depth Camera Chao Li, Zheheng Zhao, and Xiaohu Guo Department of Computer Science, The University of Texas
Mobile Point Fusion. Real-time 3d surface reconstruction out of depth images on a mobile platform
 Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Robust Human Body Shape and Pose Tracking
 Robust Human Body Shape and Pose Tracking Chun-Hao Huang 1 Edmond Boyer 2 Slobodan Ilic 1 1 Technische Universität München 2 INRIA Grenoble Rhône-Alpes Marker-based motion capture (mocap.) Adventages:
Robust Human Body Shape and Pose Tracking Chun-Hao Huang 1 Edmond Boyer 2 Slobodan Ilic 1 1 Technische Universität München 2 INRIA Grenoble Rhône-Alpes Marker-based motion capture (mocap.) Adventages:
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
SurfelWarp: Efficient Non-Volumetric Single View Dynamic Reconstruction
 Robotics: Science and Systems 2018 Pittsburgh, PA, USA, June 26-30, 2018 SurfelWarp: Efficient Non-Volumetric Single View Dynamic Reconstruction Wei Gao Massachusetts Institute of Technology Cambridge,
Robotics: Science and Systems 2018 Pittsburgh, PA, USA, June 26-30, 2018 SurfelWarp: Efficient Non-Volumetric Single View Dynamic Reconstruction Wei Gao Massachusetts Institute of Technology Cambridge,
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
International Conference on Communication, Media, Technology and Design. ICCMTD May 2012 Istanbul - Turkey
 VISUALIZING TIME COHERENT THREE-DIMENSIONAL CONTENT USING ONE OR MORE MICROSOFT KINECT CAMERAS Naveed Ahmed University of Sharjah Sharjah, United Arab Emirates Abstract Visualizing or digitization of the
VISUALIZING TIME COHERENT THREE-DIMENSIONAL CONTENT USING ONE OR MORE MICROSOFT KINECT CAMERAS Naveed Ahmed University of Sharjah Sharjah, United Arab Emirates Abstract Visualizing or digitization of the
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA
 TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Grasp Recognition using a 3D Articulated Model and Infrared Images
 Grasp Recognition using a 3D Articulated Model and Infrared Images Koichi Ogawara Institute of Industrial Science, Univ. of Tokyo, Tokyo, Japan Jun Takamatsu Institute of Industrial Science, Univ. of Tokyo,
Grasp Recognition using a 3D Articulated Model and Infrared Images Koichi Ogawara Institute of Industrial Science, Univ. of Tokyo, Tokyo, Japan Jun Takamatsu Institute of Industrial Science, Univ. of Tokyo,
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images
 Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Free-Form Mesh Tracking: a Patch-Based Approach
 Free-Form Mesh Tracking: a Patch-Based Approach Cedric Cagniart 1, Edmond Boyer 2, Slobodan Ilic 1 1 Department of Computer Science, Technical University of Munich 2 Grenoble Universités, INRIA Rhône-Alpes
Free-Form Mesh Tracking: a Patch-Based Approach Cedric Cagniart 1, Edmond Boyer 2, Slobodan Ilic 1 1 Department of Computer Science, Technical University of Munich 2 Grenoble Universités, INRIA Rhône-Alpes
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Volumetric Video Capture Using Unsynchronized, Low-Cost Cameras
 Volumetric Video Capture Using Unsynchronized, Low-Cost Cameras Andrea Bönsch 1, Andrew Feng 2, Parth Patel 2 and Ari Shapiro 2 1 Visual Computing Institute, RWTH Aachen University, Aachen, Germany 2 Institute
Volumetric Video Capture Using Unsynchronized, Low-Cost Cameras Andrea Bönsch 1, Andrew Feng 2, Parth Patel 2 and Ari Shapiro 2 1 Visual Computing Institute, RWTH Aachen University, Aachen, Germany 2 Institute
ACQUIRING 3D models of deforming objects in real-life is
 IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS 1 Robust Non-rigid Motion Tracking and Surface Reconstruction Using L 0 Regularization Kaiwen Guo, Feng Xu, Yangang Wang, Yebin Liu, Member, IEEE
IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS 1 Robust Non-rigid Motion Tracking and Surface Reconstruction Using L 0 Regularization Kaiwen Guo, Feng Xu, Yangang Wang, Yebin Liu, Member, IEEE
Multi-Frame Scene-Flow Estimation Using a Patch Model and Smooth Motion Prior
 POPHAM, BHALERAO, WILSON: MULTI-FRAME SCENE-FLOW ESTIMATION 1 Multi-Frame Scene-Flow Estimation Using a Patch Model and Smooth Motion Prior Thomas Popham tpopham@dcs.warwick.ac.uk Abhir Bhalerao abhir@dcs.warwick.ac.uk
POPHAM, BHALERAO, WILSON: MULTI-FRAME SCENE-FLOW ESTIMATION 1 Multi-Frame Scene-Flow Estimation Using a Patch Model and Smooth Motion Prior Thomas Popham tpopham@dcs.warwick.ac.uk Abhir Bhalerao abhir@dcs.warwick.ac.uk
Translation Symmetry Detection: A Repetitive Pattern Analysis Approach
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza
 Davide Scaramuzza") Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video
 Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
3D Computer Vision. Dense 3D Reconstruction II. Prof. Didier Stricker. Christiano Gava
 3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Lecture 10 Dense 3D Reconstruction
 Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material
 Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
3D Shape Recovery of Deformable Soft-tissue with Computed Tomography and Depth Scan
 3D Shape Recovery of Deformable Soft-tissue with Computed Tomography and Depth Scan Jingwei Song 1, Jun Wang 1,2, Liang Zhao 1, Shoudong Huang 1, Gamini Dissanayake 1 1. Centre for Autonomous Systems,
3D Shape Recovery of Deformable Soft-tissue with Computed Tomography and Depth Scan Jingwei Song 1, Jun Wang 1,2, Liang Zhao 1, Shoudong Huang 1, Gamini Dissanayake 1 1. Centre for Autonomous Systems,
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA
 TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi, Francois de Sorbier and Hideo Saito Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi, Kohoku-ku,
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi, Francois de Sorbier and Hideo Saito Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi, Kohoku-ku,
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction from Autonomous Quadrocopters
 Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Outline. 1 Why we re interested in Real-Time tracking and mapping. 3 Kinect Fusion System Overview. 4 Real-time Surface Mapping
 Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Multi-View Image Coding in 3-D Space Based on 3-D Reconstruction
 Multi-View Image Coding in 3-D Space Based on 3-D Reconstruction Yongying Gao and Hayder Radha Department of Electrical and Computer Engineering, Michigan State University, East Lansing, MI 48823 email:
Multi-View Image Coding in 3-D Space Based on 3-D Reconstruction Yongying Gao and Hayder Radha Department of Electrical and Computer Engineering, Michigan State University, East Lansing, MI 48823 email:
Robust Non-rigid Motion Tracking and Surface Reconstruction Using L 0 Regularization
 Robust Non-rigid Motion Tracking and Surface Reconstruction Using L 0 Regularization Kaiwen Guo 1,2, Feng Xu 1,3, Yangang Wang 4, Yebin Liu 1,2, Qionghai Dai 1,2 1 Tsinghua National Laboratory for Information
Robust Non-rigid Motion Tracking and Surface Reconstruction Using L 0 Regularization Kaiwen Guo 1,2, Feng Xu 1,3, Yangang Wang 4, Yebin Liu 1,2, Qionghai Dai 1,2 1 Tsinghua National Laboratory for Information
CMU Facilities. Motion Capture Lab. Panoptic Studio
 CMU Facilities Motion Capture Lab The 1700 square foot Motion Capture Lab provides a resource for behavior capture of humans as well as measuring and controlling robot behavior in real time. It includes
CMU Facilities Motion Capture Lab The 1700 square foot Motion Capture Lab provides a resource for behavior capture of humans as well as measuring and controlling robot behavior in real time. It includes
Motion Capture using Body Mounted Cameras in an Unknown Environment
 Motion Capture using Body Mounted Cameras in an Unknown Environment Nam Vo Taeyoung Kim Siddharth Choudhary 1. The Problem Motion capture has been recently used to provide much of character motion in several
Motion Capture using Body Mounted Cameras in an Unknown Environment Nam Vo Taeyoung Kim Siddharth Choudhary 1. The Problem Motion capture has been recently used to provide much of character motion in several
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Structure from Motion through Ellipsoid Fitting
 Int'l Conf. IP, Comp. Vision, and Pattern Recognition IPCV'15 179 Articulated Structure from Motion through Ellipsoid Fitting Peter Boyi Zhang, and Yeung Sam Hung Department of Electrical and Electronic
Int'l Conf. IP, Comp. Vision, and Pattern Recognition IPCV'15 179 Articulated Structure from Motion through Ellipsoid Fitting Peter Boyi Zhang, and Yeung Sam Hung Department of Electrical and Electronic
Learning Articulated Skeletons From Motion
 Learning Articulated Skeletons From Motion Danny Tarlow University of Toronto, Machine Learning with David Ross and Richard Zemel (and Brendan Frey) August 6, 2007 Point Light Displays It's easy for humans
Learning Articulated Skeletons From Motion Danny Tarlow University of Toronto, Machine Learning with David Ross and Richard Zemel (and Brendan Frey) August 6, 2007 Point Light Displays It's easy for humans
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material
 SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material Ayan Sinha MIT Asim Unmesh IIT Kanpur Qixing Huang UT Austin Karthik Ramani Purdue sinhayan@mit.edu a.unmesh@gmail.com
SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material Ayan Sinha MIT Asim Unmesh IIT Kanpur Qixing Huang UT Austin Karthik Ramani Purdue sinhayan@mit.edu a.unmesh@gmail.com
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
BodyFusion: Real-time Capture of Human Motion and Surface Geometry Using a Single Depth Camera
 BodyFusion: Real-time Capture of Human Motion and Surface Geometry Using a Single Depth Camera Tao Yu12, Kaiwen Guo2, Feng u2, Yuan Dong2, Zhaoqi Su2, Jianhui Zhao1, Jianguo Li3, Qionghai Dai2, Yebin Liu2
BodyFusion: Real-time Capture of Human Motion and Surface Geometry Using a Single Depth Camera Tao Yu12, Kaiwen Guo2, Feng u2, Yuan Dong2, Zhaoqi Su2, Jianhui Zhao1, Jianguo Li3, Qionghai Dai2, Yebin Liu2
High-Resolution Modeling of Moving and Deforming Objects Using Sparse Geometric and Dense Photometric Measurements
 High-Resolution Modeling of Moving and Deforming Objects Using Sparse Geometric and Dense Photometric Measurements Yi Xu Daniel G. Aliaga Department of Computer Science Purdue University {xu43 aliaga}@cs.purdue.edu
High-Resolution Modeling of Moving and Deforming Objects Using Sparse Geometric and Dense Photometric Measurements Yi Xu Daniel G. Aliaga Department of Computer Science Purdue University {xu43 aliaga}@cs.purdue.edu
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Learning 6D Object Pose Estimation and Tracking
 Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
The Lucas & Kanade Algorithm
 The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
Occluded Facial Expression Tracking
 Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
VolumeDeform: Real-time Volumetric Non-rigid Reconstruction
 VolumeDeform: Real-time Volumetric Non-rigid Reconstruction Matthias Innmann 1 Michael Zollhöfer 2 Matthias Nießner 3 Christian Theobalt 2 Marc Stamminger 1 1 University of Erlangen-Nuremberg 2 Max-Planck-Institute
VolumeDeform: Real-time Volumetric Non-rigid Reconstruction Matthias Innmann 1 Michael Zollhöfer 2 Matthias Nießner 3 Christian Theobalt 2 Marc Stamminger 1 1 University of Erlangen-Nuremberg 2 Max-Planck-Institute
Mesh from Depth Images Using GR 2 T
 Mesh from Depth Images Using GR 2 T Mairead Grogan & Rozenn Dahyot School of Computer Science and Statistics Trinity College Dublin Dublin, Ireland mgrogan@tcd.ie, Rozenn.Dahyot@tcd.ie www.scss.tcd.ie/
Mesh from Depth Images Using GR 2 T Mairead Grogan & Rozenn Dahyot School of Computer Science and Statistics Trinity College Dublin Dublin, Ireland mgrogan@tcd.ie, Rozenn.Dahyot@tcd.ie www.scss.tcd.ie/
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Dense 3D Modelling and Monocular Reconstruction of Deformable Objects
 Dense 3D Modelling and Monocular Reconstruction of Deformable Objects Anastasios (Tassos) Roussos Lecturer in Computer Science, University of Exeter Research Associate, Imperial College London Overview
Dense 3D Modelling and Monocular Reconstruction of Deformable Objects Anastasios (Tassos) Roussos Lecturer in Computer Science, University of Exeter Research Associate, Imperial College London Overview
Face Tracking. Synonyms. Definition. Main Body Text. Amit K. Roy-Chowdhury and Yilei Xu. Facial Motion Estimation
 Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
Probabilistic Deformable Surface Tracking from Multiple Videos
 Probabilistic Deformable Surface Tracking from Multiple Videos Cedric Cagniart 1,EdmondBoyer 2, and Slobodan Ilic 1 1 Technische Universität München 2 Grenoble Universités - INRIA Rhône-Alpes {cagniart,slobodan.ilic}@in.tum.de,
Probabilistic Deformable Surface Tracking from Multiple Videos Cedric Cagniart 1,EdmondBoyer 2, and Slobodan Ilic 1 1 Technische Universität München 2 Grenoble Universités - INRIA Rhône-Alpes {cagniart,slobodan.ilic}@in.tum.de,
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
3D Imaging from Video and Planar Radiography
 3D Imaging from Video and Planar Radiography Julien Pansiot and Edmond Boyer Morpheo, Inria Grenoble Rhône-Alpes, France International Conference on Medical Image Computing and Computer Assisted Intervention
3D Imaging from Video and Planar Radiography Julien Pansiot and Edmond Boyer Morpheo, Inria Grenoble Rhône-Alpes, France International Conference on Medical Image Computing and Computer Assisted Intervention
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
SobolevFusion: 3D Reconstruction of Scenes Undergoing Free Non-rigid Motion
 SobolevFusion: 3D Reconstruction of Scenes Undergoing Free Non-rigid Motion Miroslava Slavcheva 1,2 Maximilian Baust 1* Slobodan Ilic 1,2 1 Technische Universität München 2 Siemens Corporate Technology
SobolevFusion: 3D Reconstruction of Scenes Undergoing Free Non-rigid Motion Miroslava Slavcheva 1,2 Maximilian Baust 1* Slobodan Ilic 1,2 1 Technische Universität München 2 Siemens Corporate Technology
Video Alignment. Final Report. Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin
 Final Report Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This report describes a method to align two videos.
Final Report Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This report describes a method to align two videos.
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XXXIV-5/W10
 BUNDLE ADJUSTMENT FOR MARKERLESS BODY TRACKING IN MONOCULAR VIDEO SEQUENCES Ali Shahrokni, Vincent Lepetit, Pascal Fua Computer Vision Lab, Swiss Federal Institute of Technology (EPFL) ali.shahrokni,vincent.lepetit,pascal.fua@epfl.ch
BUNDLE ADJUSTMENT FOR MARKERLESS BODY TRACKING IN MONOCULAR VIDEO SEQUENCES Ali Shahrokni, Vincent Lepetit, Pascal Fua Computer Vision Lab, Swiss Federal Institute of Technology (EPFL) ali.shahrokni,vincent.lepetit,pascal.fua@epfl.ch
Reconstruction of complete 3D object model from multi-view range images.
 Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Dynamic Human Surface Reconstruction Using a Single Kinect
 2013 13th International Conference on Computer-Aided Design and Computer Graphics Dynamic Human Surface Reconstruction Using a Single Kinect Ming Zeng Jiaxiang Zheng Xuan Cheng Bo Jiang Xinguo Liu Software
2013 13th International Conference on Computer-Aided Design and Computer Graphics Dynamic Human Surface Reconstruction Using a Single Kinect Ming Zeng Jiaxiang Zheng Xuan Cheng Bo Jiang Xinguo Liu Software
Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction
 MAIER ET AL.: EFFICIENT LARGE-SCALE ONLINE SURFACE CORRECTION 1 Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction Robert Maier maierr@in.tum.de Raphael Schaller schaller@in.tum.de
MAIER ET AL.: EFFICIENT LARGE-SCALE ONLINE SURFACE CORRECTION 1 Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction Robert Maier maierr@in.tum.de Raphael Schaller schaller@in.tum.de
Hybrid Textons: Modeling Surfaces with Reflectance and Geometry
 Hybrid Textons: Modeling Surfaces with Reflectance and Geometry Jing Wang and Kristin J. Dana Electrical and Computer Engineering Department Rutgers University Piscataway, NJ, USA {jingwang,kdana}@caip.rutgers.edu
Hybrid Textons: Modeling Surfaces with Reflectance and Geometry Jing Wang and Kristin J. Dana Electrical and Computer Engineering Department Rutgers University Piscataway, NJ, USA {jingwang,kdana}@caip.rutgers.edu
Object Reconstruction
 B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction. CVPR 2017 Tutorial Christian Häne UC Berkeley
 Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Dynamic 2D/3D Registration for the Kinect
 Dynamic 2D/3D Registration for the Kinect Sofien Bouaziz Mark Pauly École Polytechnique Fédérale de Lausanne Abstract Image and geometry registration algorithms are an essential component of many computer
Dynamic 2D/3D Registration for the Kinect Sofien Bouaziz Mark Pauly École Polytechnique Fédérale de Lausanne Abstract Image and geometry registration algorithms are an essential component of many computer
Dynamic Geometry Processing
 Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Removing Moving Objects from Point Cloud Scenes
 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/91/106305353.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Ping Tan. Simon Fraser University
 Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Improvement and Evaluation of a Time-of-Flight-based Patient Positioning System
 Improvement and Evaluation of a Time-of-Flight-based Patient Positioning System Simon Placht, Christian Schaller, Michael Balda, André Adelt, Christian Ulrich, Joachim Hornegger Pattern Recognition Lab,
Improvement and Evaluation of a Time-of-Flight-based Patient Positioning System Simon Placht, Christian Schaller, Michael Balda, André Adelt, Christian Ulrich, Joachim Hornegger Pattern Recognition Lab,
Capturing and View-Dependent Rendering of Billboard Models
 Capturing and View-Dependent Rendering of Billboard Models Oliver Le, Anusheel Bhushan, Pablo Diaz-Gutierrez and M. Gopi Computer Graphics Lab University of California, Irvine Abstract. In this paper,
Capturing and View-Dependent Rendering of Billboard Models Oliver Le, Anusheel Bhushan, Pablo Diaz-Gutierrez and M. Gopi Computer Graphics Lab University of California, Irvine Abstract. In this paper,
Augmented Reality. Sung-eui Yoon
 Augmented Reality Sung-eui Yoon 1 Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing recent papers 2 Expectations Mid-term project presentation
Augmented Reality Sung-eui Yoon 1 Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing recent papers 2 Expectations Mid-term project presentation
The Template Update Problem
 The Template Update Problem Iain Matthews, Takahiro Ishikawa, and Simon Baker The Robotics Institute Carnegie Mellon University Abstract Template tracking dates back to the 1981 Lucas-Kanade algorithm.
The Template Update Problem Iain Matthews, Takahiro Ishikawa, and Simon Baker The Robotics Institute Carnegie Mellon University Abstract Template tracking dates back to the 1981 Lucas-Kanade algorithm.