1 November Basics of In-Vehicle Networking (IVN) Protocols
|
|
|
- Valerie Cannon
- 6 years ago
- Views:
Transcription


1 1 November 2011 Basics of In-Vehicle Networking (IVN) Protocols


2 Available IVN Protocols There are many Bus Systems used in a car but... "It is becoming clear that regardless of carmaker, new vehicles will be made using LIN for the lowest data-rate functions, CAN for medium speed, MOST for the high-speed data rates and FlexRay, for safetycritical applications such as steerand brake-by-wire." Automotive Industries, November 2011
 byte-word interface Maximum speed = 20 kb/s (EMC/clock synchronisation) Master controls the")
 Nodes added without t HW/SW changes in other slave nodes Typically < 12 nodes, (64 identifiers & relatively low transmission speed)")
3 LIN Overview Like in a classroom situation, the LIN master initiates iti t the response of the other participants LIN = 12 V, single-wire serial communications protocol based on the common SCI (UART) byte-word interface Maximum speed = 20 kb/s (EMC/clock synchronisation) Master controls the medium access: no arbitration or collision management, guaranteed latency times Clock synchronization mechanism by slave nodes (no need for quartz or ceramics resonator) Nodes added without t HW/SW changes in other slave nodes Typically < 12 nodes, (64 identifiers & relatively low transmission speed) 3 November 2011



4 LIN Applications Mirrors, window lift, doors switches, door lock, HVAC motors, control panel, engine sensors, engine cooling fan, seat positioning motors, seat switches, wiper control, light switches, interface switches to radio/navigation/phone, rain sensor, light control, sun roof, RF receivers, body computer/smart junction box, interior lighting, and more Steering Wheel: cruise control, wiper, turning light, climate control, radio, telephone Roof :rain sensor, light sensor, light control, sun roof Climate: small motors, control panel Engine: sensors, small motors Seat: seat position motors, occupancy sensor, control panel Door: mirror, central ECU, mirror switch, window lift, seat control switch, door lock 4 November 2011
5 LIN details Protocol stack A node in a cluster interfaces to the physical bus wire using a frame transceiver. The frames are not accessed directly by the application; a signal based interaction layer is added in between. As a complement, a transport layer interface exists between the application and the frame handler. Application program Interface (API) Specification Protocol Specification Physical Layer Specification 5 November 2011
6 LIN details Physical Layer Vsup between 7 V and 18 V Strict requirements for slope and symmetry Duty-cycle: Min = 39.6 %, Max = 58.1% (Bus-load: time-constant between 1 µs and 5 µs: 1k/1 nf 660/6.8 nf 500/10 nf) (not-synchronized oscillator <14% tolerance) 6 November 2011
7 LIN details Communication concept Communication initiated by the master task (message header) Slave task activated upon recognition of identifier - starts the message response (1-8 data bytes + 1 checksum byte). Data correctness: parity, checksum Identifier = content, not the destination! exchange of data in various ways: M S(s) S M S S(s) message frame. 0 = dominant state 1 = recessive state Not used = recessive 7 November 2011
8 LIN Reference Information LIN Specification Package Revision 2.2 Contact: 8 November 2011
9 CAN Overview In CAN communication, all partners are equal and are able to communicate at any time. In case of conflicts (two speaking at the same time), arbitration is used to ensure messages are understood. Controller Area Network is a fast serial bus designed to provide an efficient, reliable and very economical link between sensors and actuators CAN connects the vehicle's electronic equipment These connections facilitate the sharing of information and resources among the distributed applications All nodes can send a message at any time, when two nodes are accessing the bus together, arbitration decides who will continue 9 November 2011
10 CAN Applications CAN was developed in early 1980 s for automotive and is widely used in all car parts (Powertrain, Chassis, Body); every car developed in Europe, USA, and Japan has at least a few CAN nodes; CAN is being adopted in Asia as well An increasing number of products have a CAN transceiver implemented together with other functionality (e.g. in system basis chips, stepper motors, park assist, ) CAN also found its way into Industrial Applications See 10 November 2011
 packet identifier Automatic error detection,")
11 CAN - details Characteristics Asynchronous communication (Event Triggered) Any node can access the bus when the bus is quiet Non-destructive ti arbitration, ti 100% use of the bandwidth without loss of data, large latency for low priority messages, low latency for high priority messages Variable message priority based on 11-bit (or extended 29 bit) packet identifier Automatic error detection, signaling and retries CAN uses a twisted pair cable to communicate at speeds up to 1 Mb/s with up to 40 devices 11 November 2011
 Single wire CAN (SEA2411, 33,33 kbit/s) and low speed CAN (ISO11898-3, 125Kbit/s) are not covered by above description 12 November")
12 CAN - details Physical Layer (*) CAN bus requires line termination ISO standard define the impedance of the cable as 120 ± 12 Ω Twisted pair, shielded or unshielded is requested (*) Single wire CAN (SEA2411, 33,33 kbit/s) and low speed CAN (ISO , 125Kbit/s) are not covered by above description 12 November 2011
 Note: Low speed CAN (ISO11898-3,")
13 CAN - details Physical Layer What is the advantage of the two wire CAN communication? EMC applied on two terminated floating wires is not changing differential voltage When twisted pair is used it has advantage for electromagnetic emissions (EME) Note: Low speed CAN (ISO , 125Kbit/s) bus is not a terminated bus and 2 wires are used here for fault tolerance reasons. One wire shorted, disconnected or short in between the two wires causes communication switching to single ended communication. 13 November 2011


14 CAN details Bus arbitration in more details If two messages are simultaneously sent over the CAN bus, the bus takes the logical AND of the signal Hence, the messages identifiers with the lowest binary number gets the highest priority Every device listens on the channel and backs off as and when it notices a mismatch between the bus s s bit and its identifier s bit 14 November 2011
15 CAN Reference Information (ISO ) CAN Data Link Layer and Physical Signaling (ISO ) High speed CAN Medium Access Unit (ISO ) CAN Low-Speed, Fault-Tolerant (ISO ) CAN Time-Triggered Communication (ISO ) CAN High-Speed with Low-Power Mode (SEA2411) Single wire CAN 2.0 Part A (pdf) describing the CAN base frame format CAN 2.0 Part B (pdf) describing both base and extended frame formats 15 November 2011


16 FlexRay Overview High data rates (up to 10 Mb/s) Time- and event-triggered behavior As in a train-schedule, all FlexRay traffic on the bus is nicely scheduled using time-slots. Redundancy Fault-tolerance tolerance Deterministic (use of time-slots ) 16 November 2011
17 FlexRay Applications FlexRay delivers the error tolerance, speed and time-determinism performance requirements for x-by-wire applications (i.e. drive-by-wire, steer-by-wire, brake-by-wire, etc.) The first series production vehicle with FlexRay was at the end of 2006 in the BMW X5, enabling a new and fast adaptive damping system 17 November 2011
18 FlexRay - Details Basic requirements Bit-rates up to 10 Mb/s over UTP or STP Line termination (Line impedance 80 to 110 Ω) Push-pull driver (2 dominant states + 1 idle state (recessive) ) Maximum wire-length (strong attenuation at 10 Mb/s) Slope-control + symmetry of slopes and delays Jitter EMC For TT-protocols: Time-skew versus delay Oscillator stability: Jitter, accuracy Reliable and fault-tolerant tolerant Bus-Guardian: To avoid babbling idiot Control media access based on time-slots Bus Topologies: Bus-architecture (passive bus) More difficult for line-termination Star-configuration (active star) Point to point communication 18 November 2011

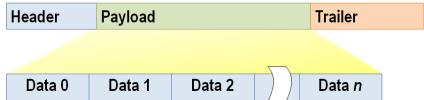
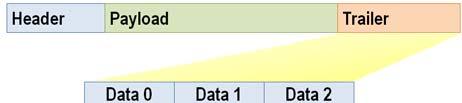
19 FlexRay Details Physical Layer Communication cycle Static Segment: Reserved slots for deterministic data that arrives at a fixed period. Dynamic Segment: Is used for a wider variety of event-based data that does not require determinism (cfr.can) Symbol Window: Typically used for network maintenance and signaling for starting the network. Network Idle Time: A known "quiet" time used to maintain synchronization between node clocks. 19 November 2011


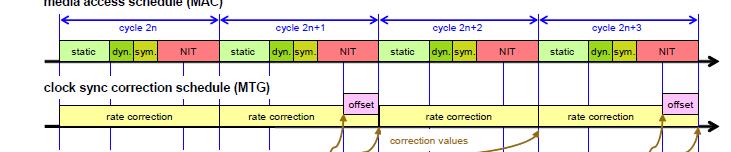
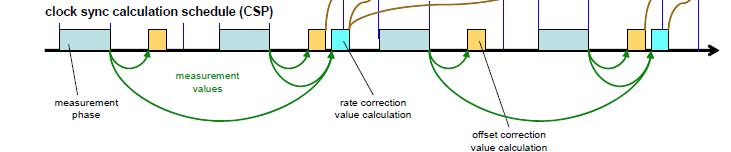
20 FlexRay Details Frame Format Clock Synchronization See chapter 8 of FlexRay Protocol Specification 20 November 2011
21 FlexRay Reference Information Current standard (v3.0.1) has the following documents: FlexRay Specifications Version FlexRay Protocol lspecification Version FlexRay Protocol Conformance Test Specification Version FlexRay Electrical Physical Layer Specification Version FlexRay Electrical Physical Layer Conformance Test Specification Version FlexRay Electrical Physical Layer Application Notes Version The FlexRay specifications v3.0.1 were submitted to ISO in order to be published as a standard for road vehicles 21 November 2011

")
22 IVN Testing & Conformance Conformance testing Compliance with the standard Executed by: C&S Group Ihr ESD & EMC testing According to OEM requirements Executed by: IBEE-Zwickau Underwriters Laboratories(UL) 22 November 2011
23 Bus - Comparison Bus LIN CAN FlexRay MOST Cost/Node [$] (ABIreport: Y08) Used in Subnets Soft real-time Hard real-time Multimedia Application domains Body Powertrain, Chassis Chassis, Powertrain Multimedia, Telematics Message transmission Synchronous Asynchronous Synchronous & Asynchronous Synchronous & Asynchronous Message identification Identifier Identifier Time slot Architecture Single Master typ slaves Multi-Master typ nodes Multi-Master up to 64 nodes Multi-Master up to 64 nodes Access control Polling CSMA/CA TDMA TDM CSMA/CA Data Rate 20 kbps 1 Mbps 10 Mbps 24 Mbps Physical Layer Single Wire Dual-Wire Dual-Wire (Optical Fiber) Optical Fiber (Dual-wire) Latency Jitter Constant Load dependent Constant Data stream Babbling idiot n/a Not provided Provided Extensibility High High Low High 23 November 2011

24 Released LIN Products from ON Semiconductor WPN OPN (T&R) Description Standard AMIS AMIS30600LINI1RG LIN Transceiver NCV7321 NCV7321D10R2G Stand-alone LIN Transceiver NCV7321D11R2G NCV7420 NCV7420D23R2G LIN Transceiver with 3.3V VReg. NCV7420D24R2G NCV7420D25R2G NCV7420D26R2G LIN Transceiver with 5V VReg. NCV7425 NCV7425DW0R2G LIN Transceiver with 3.3V Vreg (150mA) NCV7425DW5R2G LIN Transceiver with 5V Vreg (150mA) LINv1.3 LINv2.1 J November 2011
25 Released CAN Products from ON Semiconductor WPN OPN (T&R) Description Standard AMIS AMIS30660CANH2RG CAN HS Transceiver (5V) AMIS AMIS30663CANG2RG CAN HS Transceiver (3.3V) AMIS AMIS42700WCGA4RH Dual CAN HS Transceiver AMIS AMIS42665TJAA1RG HS LP CAN Transceiver (Level WU - Matte Sn) AMIS42665TJAA3RL AMIS42665TJAA6RG HS LP CAN Transceiver (Level WU - NiPdAu) HS LP CAN Transceiver (Edge WU GM spec.) ISO NCV7340 NCV7340D12R2G HS LP CAN Transceiver (Level WU) NCV7340D13R2G ISO NCV7340D14R2G HS LP CAN Transceiver (Edge WU GM spec.) NCV7441 NCV7441D20R2G Dual HS LP CAN Transceiver NCV7341 NCV7341D20R2G Improved HS LP CAN Transceiver with Error Detection (>6KV) NCV7341D21R2G HS LP CAN Transceiver with Error Detection AMIS AMIS41682CANM1RG CAN LS Transceiver (5V) ISO AMIS AMIS41683CANN1RG CAN LS Transceiver (3.3V) 3 NCV7356 See datasheet (6 Single Wire CAN versions) 25 November 2011
26 Released Protection Devices from ON Semiconductor NUP1105L NUP2105L 26 November 2011
27 IVN Products & Solutions from ON Semiconductor For more information on IVN products & solutions from ON Semiconductor, visit: Automotive Applications ESD Protection Diodes Data Transmitters & Receivers 27 November 2011
FlexRay and Automotive Networking Future
 FlexRay and Automotive Networking Future Chris Quigley Warwick Control Technologies Presentation Overview High Speed and High Integrity Networking Why FlexRay? CAN Problems Time Triggered Network Principles
FlexRay and Automotive Networking Future Chris Quigley Warwick Control Technologies Presentation Overview High Speed and High Integrity Networking Why FlexRay? CAN Problems Time Triggered Network Principles
Systems. Roland Kammerer. 10. November Institute of Computer Engineering Vienna University of Technology. Communication Protocols for Embedded
 Communication Roland Institute of Computer Engineering Vienna University of Technology 10. November 2010 Overview 1. Definition of a protocol 2. Protocol properties 3. Basic Principles 4. system communication
Communication Roland Institute of Computer Engineering Vienna University of Technology 10. November 2010 Overview 1. Definition of a protocol 2. Protocol properties 3. Basic Principles 4. system communication
Lecture 2. Basics of networking in automotive systems: Network. topologies, communication principles and standardised protocols
 Lecture 2. Basics of networking in automotive systems: Network topologies, communication principles and standardised protocols Objectives Introduce basic concepts used in building networks for automotive
Lecture 2. Basics of networking in automotive systems: Network topologies, communication principles and standardised protocols Objectives Introduce basic concepts used in building networks for automotive
Additional Slides (informative)
") Automation Systems Discrete Event Control Systems and Networked Automation Systems Additional Slides (informative) Application Automotive Networks (LIN, CAN, FlexRay, MOST) Vorlesungstitel Vehicle Bus
Automation Systems Discrete Event Control Systems and Networked Automation Systems Additional Slides (informative) Application Automotive Networks (LIN, CAN, FlexRay, MOST) Vorlesungstitel Vehicle Bus
In-Vehicle Networking freescale.com/automotive
 LIN/CAN/RF/FlexRay Technology In-Vehicle Networking freescale.com/automotive In-Vehicle Networking As an industry leader in automotive solutions, Freescale Semiconductor has greatly contributed to in-vehicle
LIN/CAN/RF/FlexRay Technology In-Vehicle Networking freescale.com/automotive In-Vehicle Networking As an industry leader in automotive solutions, Freescale Semiconductor has greatly contributed to in-vehicle
Today. Last Time. Motivation. CAN Bus. More about CAN. What is CAN?
 Embedded networks Characteristics Requirements Simple embedded LANs Bit banged SPI I2C LIN Ethernet Last Time CAN Bus Intro Low-level stuff Frame types Arbitration Filtering Higher-level protocols Today
Embedded networks Characteristics Requirements Simple embedded LANs Bit banged SPI I2C LIN Ethernet Last Time CAN Bus Intro Low-level stuff Frame types Arbitration Filtering Higher-level protocols Today
Content. Deterministic Access Polling(1) Master-Slave principles: Introduction Layer 2: Media Access Control
 Master-Slave principles: Introduction Layer 2: Media Access Control") Content Introduction Layer 2: Frames Error Handling Media Access Control General approaches and terms Network Topologies Media Access Principles (Random) Aloha Principles CSMA, CSMA/CD, CSMA / CA Media
Content Introduction Layer 2: Frames Error Handling Media Access Control General approaches and terms Network Topologies Media Access Principles (Random) Aloha Principles CSMA, CSMA/CD, CSMA / CA Media
FlexRay International Workshop. Protocol Overview
 FlexRay International Workshop 4 th March 2003 Detroit Protocol Overview Dr. Christopher Temple - Motorola FlexRay principles Provide a communication infrastructure for future generation highspeed control
FlexRay International Workshop 4 th March 2003 Detroit Protocol Overview Dr. Christopher Temple - Motorola FlexRay principles Provide a communication infrastructure for future generation highspeed control
Field buses (part 2): time triggered protocols
: time triggered protocols") Field buses (part 2): time triggered protocols Nico Fritz Universität des Saarlandes Embedded Systems 2002/2003 (c) Daniel Kästner. 1 CAN and LIN LIN CAN Type Arbitration Transfer rate Serial communication
Field buses (part 2): time triggered protocols Nico Fritz Universität des Saarlandes Embedded Systems 2002/2003 (c) Daniel Kästner. 1 CAN and LIN LIN CAN Type Arbitration Transfer rate Serial communication
Embedded Systems. 8. Communication
 Embedded Systems 8. Communication Lothar Thiele 8-1 Contents of Course 1. Embedded Systems Introduction 2. Software Introduction 7. System Components 10. Models 3. Real-Time Models 4. Periodic/Aperiodic
Embedded Systems 8. Communication Lothar Thiele 8-1 Contents of Course 1. Embedded Systems Introduction 2. Software Introduction 7. System Components 10. Models 3. Real-Time Models 4. Periodic/Aperiodic
Controller area network
 Controller area network From Wikipedia, the free encyclopedia (Redirected from Controller area network) Controller area network (CAN or CAN-bus) is a vehicle bus standard designed to allow microcontrollers
Controller area network From Wikipedia, the free encyclopedia (Redirected from Controller area network) Controller area network (CAN or CAN-bus) is a vehicle bus standard designed to allow microcontrollers
Mixed-Criticality Systems based on a CAN Router with Support for Fault Isolation and Selective Fault-Tolerance
 IFAC 2014 Mixed-Criticality Systems based on a Router with Support for Fault Isolation and Selective Fault-Tolerance Roland Kammerer 1, Roman Obermaisser², Mino Sharkhawy 1 1 Vienna University of Technology,
IFAC 2014 Mixed-Criticality Systems based on a Router with Support for Fault Isolation and Selective Fault-Tolerance Roland Kammerer 1, Roman Obermaisser², Mino Sharkhawy 1 1 Vienna University of Technology,
Institutionen för datavetenskap Department of Computer and Information Science
 Institutionen för datavetenskap Department of Computer and Information Science Final thesis A SystemC simulator for the dynamic segment of the FlexRay protocol by Venkata Rama Krishna Reddy Podduturi LIU-IDA/LITH-EX-A--/9--SE
Institutionen för datavetenskap Department of Computer and Information Science Final thesis A SystemC simulator for the dynamic segment of the FlexRay protocol by Venkata Rama Krishna Reddy Podduturi LIU-IDA/LITH-EX-A--/9--SE
Application guide ESD protection Automotive
 Application guide ESD protection Automotive For In-Vehicle Networks and multimedia buses: CAN, LIN, FlexRay, BroadR-Reach, HDMI, LVDS, USB Type-C Contents Introduction... 3 A growing and challenging market
Application guide ESD protection Automotive For In-Vehicle Networks and multimedia buses: CAN, LIN, FlexRay, BroadR-Reach, HDMI, LVDS, USB Type-C Contents Introduction... 3 A growing and challenging market
UNDERSTANDING THE CONTROLLER AREA NETWORK (CAN)
") UNDERSTANDING THE CONTROLLER AREA NETWORK (CAN) The unsuspecting troops had come under heavy enemy fire just before dawn and the garrison was caught totally by surprise. The fort commander had been awakened
UNDERSTANDING THE CONTROLLER AREA NETWORK (CAN) The unsuspecting troops had come under heavy enemy fire just before dawn and the garrison was caught totally by surprise. The fort commander had been awakened
Distributed Embedded Systems and realtime networks
 STREAM01 / Mastère SE Distributed Embedded Systems and realtime networks Embedded network TTP Marie-Agnès Peraldi-Frati AOSTE Project UNSA- CNRS-INRIA January 2008 1 Abstract Requirements for TT Systems
STREAM01 / Mastère SE Distributed Embedded Systems and realtime networks Embedded network TTP Marie-Agnès Peraldi-Frati AOSTE Project UNSA- CNRS-INRIA January 2008 1 Abstract Requirements for TT Systems
CAN bus and NMEA2000 1
 NMEA2000 relation to CAN and how Warwick Control can help Richard McLaughlin B.Sc., M.Sc., CEng Dr Chris Quigley Warwick Control NMEA Conference 2016, Naples, Florida CAN bus and NMEA2000 1 Company Profile
NMEA2000 relation to CAN and how Warwick Control can help Richard McLaughlin B.Sc., M.Sc., CEng Dr Chris Quigley Warwick Control NMEA Conference 2016, Naples, Florida CAN bus and NMEA2000 1 Company Profile
Communication (III) Kai Huang
 Kai Huang") Communication (III) Kai Huang Ethernet Turns 40 12/17/2013 Kai.Huang@tum 2 Outline Bus basics Multiple Master Bus Network-on-Chip Examples o SPI o CAN o FlexRay o Ethernet Basic OSI model Real-Time Ethernet
Communication (III) Kai Huang Ethernet Turns 40 12/17/2013 Kai.Huang@tum 2 Outline Bus basics Multiple Master Bus Network-on-Chip Examples o SPI o CAN o FlexRay o Ethernet Basic OSI model Real-Time Ethernet
Introduction of CAN FD into the next generation of vehicle E/E architectures
 Introduction of CAN FD into the next generation of vehicle E/E architectures 16 th international CAN Conference, March 7-8 2017, Nuremberg Marc Schreiner, Daimler AG Agenda Introduction Future Vehicle
Introduction of CAN FD into the next generation of vehicle E/E architectures 16 th international CAN Conference, March 7-8 2017, Nuremberg Marc Schreiner, Daimler AG Agenda Introduction Future Vehicle
Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007
 Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007 Automotive Networks complex networks hundreds of functions 50+ ECUs (Electronic Control Unit)
Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007 Automotive Networks complex networks hundreds of functions 50+ ECUs (Electronic Control Unit)
Transporting audio-video data
 Transporting audio-video data A particular use case in embedded system networks is the delivery of audiovideo data Specific requirements: Higher datarates dictated by the volume of information that has
Transporting audio-video data A particular use case in embedded system networks is the delivery of audiovideo data Specific requirements: Higher datarates dictated by the volume of information that has
Communication in Automotive Networks Illustrated with an Example of Vehicle Stability Program: Part I - Control Area Network
 DOI 10.7603/s40707-013-0013-8 Communication in Automotive Networks Illustrated with an Example of Vehicle Stability Program: Part I - Control Area Network Grzejszczyk Elżbieta, Ph.D.eng. Docent, Electrical
DOI 10.7603/s40707-013-0013-8 Communication in Automotive Networks Illustrated with an Example of Vehicle Stability Program: Part I - Control Area Network Grzejszczyk Elżbieta, Ph.D.eng. Docent, Electrical
An Introduction to FlexRay as an Industrial Network
 An Introduction to FlexRay as an Industrial Network Robert Shaw, Brendan Jackman Automotive Control Group, Waterford Institute of Technology, Waterford, Ireland. E-mail: rshaw@wit.ie, bjackman@wit.ie Website:
An Introduction to FlexRay as an Industrial Network Robert Shaw, Brendan Jackman Automotive Control Group, Waterford Institute of Technology, Waterford, Ireland. E-mail: rshaw@wit.ie, bjackman@wit.ie Website:
Real-Time Communications. LS 12, TU Dortmund
 Real-Time Communications Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 20, Jan., 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 29 Random Access no access control; requires low medium utilization Prof.
Real-Time Communications Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 20, Jan., 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 29 Random Access no access control; requires low medium utilization Prof.
Real-Time (Paradigms) (47)
 (47)") Real-Time (Paradigms) (47) Memory: Memory Access Protocols Tasks competing for exclusive memory access (critical sections, semaphores) become interdependent, a common phenomenon especially in distributed
Real-Time (Paradigms) (47) Memory: Memory Access Protocols Tasks competing for exclusive memory access (critical sections, semaphores) become interdependent, a common phenomenon especially in distributed
Introduction of CAN FD into the next generation of vehicle E/ E architectures. Vector CAN FD Symposium 2017, Marc Schreiner, Daimler AG
 Introduction of CAN FD into the next generation of vehicle E/ E architectures Vector CAN FD Symposium 2017, 16.2.2017 Marc Schreiner, Daimler AG Agenda Introduction Future Vehicle Architectures Integration
Introduction of CAN FD into the next generation of vehicle E/ E architectures Vector CAN FD Symposium 2017, 16.2.2017 Marc Schreiner, Daimler AG Agenda Introduction Future Vehicle Architectures Integration
The House Intelligent Switch Control Network based On CAN bus
 The House Intelligent Switch Control Network based On CAN bus A.S.Jagadish Department Electronics and Telecommunication Engineering, Bharath University Abstract The Embedded Technology is now in its prime
The House Intelligent Switch Control Network based On CAN bus A.S.Jagadish Department Electronics and Telecommunication Engineering, Bharath University Abstract The Embedded Technology is now in its prime
Serial Buses in Industrial and Automotive Applications
 Serial Buses in Industrial and Automotive Applications Presented by Neelima Chaurasia Class: #368 1 Overview As consumer electronics, computer peripherals, vehicles and industrial applications add embedded
Serial Buses in Industrial and Automotive Applications Presented by Neelima Chaurasia Class: #368 1 Overview As consumer electronics, computer peripherals, vehicles and industrial applications add embedded
MIGRATING TO CAN FD. Tony Adamson. Marketing Director CAN / LIN / FlexRay
 MIGRATING TO CAN FD Tony Adamson Marketing Director CAN / LIN / FlexRay Agenda WHO ARE WE CAR NETWORKS UNDER TRANSFORMATION SPEED SRITY OUR MISSION AND STRATEGY 2 2 FEBRUARY 16, 2016 VECTOR CAN FD SYMPOSIUM
MIGRATING TO CAN FD Tony Adamson Marketing Director CAN / LIN / FlexRay Agenda WHO ARE WE CAR NETWORKS UNDER TRANSFORMATION SPEED SRITY OUR MISSION AND STRATEGY 2 2 FEBRUARY 16, 2016 VECTOR CAN FD SYMPOSIUM
CAN (Controller Area Network) Physical Layer
 Physical Layer") CAN (Controller Area Network) Physical Layer Technical Training Systems Engineering Industrial Interface Networking Overview Networking: OSI 7 Layer Model Open Systems Interconnection Basic Reference Model
CAN (Controller Area Network) Physical Layer Technical Training Systems Engineering Industrial Interface Networking Overview Networking: OSI 7 Layer Model Open Systems Interconnection Basic Reference Model
An Encapsulated Communication System for Integrated Architectures
 An Encapsulated Communication System for Integrated Architectures Architectural Support for Temporal Composability Roman Obermaisser Overview Introduction Federated and Integrated Architectures DECOS Architecture
An Encapsulated Communication System for Integrated Architectures Architectural Support for Temporal Composability Roman Obermaisser Overview Introduction Federated and Integrated Architectures DECOS Architecture
16 Time Triggered Protocol
 16 Time Triggered Protocol [TTtech04] (TTP) 18-549 Distributed Embedded Systems Philip Koopman October 25, 2004 Significant material drawn from: Prof. H. Kopetz [Kopetz] TTP Specification v 1.1 [TTTech]
16 Time Triggered Protocol [TTtech04] (TTP) 18-549 Distributed Embedded Systems Philip Koopman October 25, 2004 Significant material drawn from: Prof. H. Kopetz [Kopetz] TTP Specification v 1.1 [TTTech]
In Vehicle Networking ESD Performance
 In Vehicle Networking ESD Performance 1 Agenda 1. Introduction 2. Automotive Requirements Quality, High Temperatures & Robustness EMC/ESD performance 3. Physical layer: ESD Protection Transceivers 4. OEM
In Vehicle Networking ESD Performance 1 Agenda 1. Introduction 2. Automotive Requirements Quality, High Temperatures & Robustness EMC/ESD performance 3. Physical layer: ESD Protection Transceivers 4. OEM
Application Note, V1.0, Feb AP LIN Application for XC164CM Using DAvE LIN Configuration tool. Microcontrollers
 Application Note, V1.0, Feb. 2007 AP16107 for XC164CM Using DAvE LIN Configuration tool Microcontrollers Edition 2007-02-15 Published by Infineon Technologies AG 81726 München, Germany Infineon Technologies
Application Note, V1.0, Feb. 2007 AP16107 for XC164CM Using DAvE LIN Configuration tool Microcontrollers Edition 2007-02-15 Published by Infineon Technologies AG 81726 München, Germany Infineon Technologies
Flexray Protocol in Automotive Network Communications
 Flexray Protocol in Automotive Network Communications 1. Anjan Kumar B S, 2. Arpitha Rani R, 3. Keya Priyambada, 4. Arti Kumari 1. Asst.Professor, Department of Instrumentation Technology, Bangalore Institute
Flexray Protocol in Automotive Network Communications 1. Anjan Kumar B S, 2. Arpitha Rani R, 3. Keya Priyambada, 4. Arti Kumari 1. Asst.Professor, Department of Instrumentation Technology, Bangalore Institute
NETWORK SECURITY ITEC 435
 NETWORK SECURITY ITEC 435 Agenda Chapter 2: Introduction to Networking Introduction to Networking Networking Fundamentals Reasons to Network Getting the Message Across Analog Information on an Analog Medium
NETWORK SECURITY ITEC 435 Agenda Chapter 2: Introduction to Networking Introduction to Networking Networking Fundamentals Reasons to Network Getting the Message Across Analog Information on an Analog Medium
LIN Protocol-Emerging Trend in Automotive Electronics
 Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 5 (2013), pp. 561-568 Research India Publications http://www.ripublication.com/aeee.htm LIN Protocol-Emerging Trend in Automotive
Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 5 (2013), pp. 561-568 Research India Publications http://www.ripublication.com/aeee.htm LIN Protocol-Emerging Trend in Automotive
Implementation and validation of SAE J1850 (VPW) protocol solution for diagnosis application
 protocol solution for diagnosis application") Implementation and validation of SAE J1850 (VPW) protocol solution for diagnosis application Pallavi Pandurang Jadhav 1, Prof. S.N.Kore 2 1Department Of Electronics Engineering, Walchand College Of Engineering,
Implementation and validation of SAE J1850 (VPW) protocol solution for diagnosis application Pallavi Pandurang Jadhav 1, Prof. S.N.Kore 2 1Department Of Electronics Engineering, Walchand College Of Engineering,
Frequently Asked Questions
 Product Name: System Basis Chips (SBCs) Date: April 2013 Application: Automotive ECUs Datasheet: www.infineon.com/sbc Contact Person: Norbert Ulshoefer/Antonio Monetti Note: The following information is
Product Name: System Basis Chips (SBCs) Date: April 2013 Application: Automotive ECUs Datasheet: www.infineon.com/sbc Contact Person: Norbert Ulshoefer/Antonio Monetti Note: The following information is
ISO INTERNATIONAL STANDARD. Road vehicles FlexRay communications system Part 2: Data link layer specification
 INTERNATIONAL STANDARD ISO 17458-2 First edition 2013-02-01 Road vehicles FlexRay communications system Part 2: Data link layer specification Véhicules routiers Système de communications FlexRay Partie
INTERNATIONAL STANDARD ISO 17458-2 First edition 2013-02-01 Road vehicles FlexRay communications system Part 2: Data link layer specification Véhicules routiers Système de communications FlexRay Partie
Debugging CAN, LIN, and FlexRay Automotive Buses with an Oscilloscope
 Debugging CAN, LIN, and FlexRay Automotive Buses with an Oscilloscope Introduction Embedded systems applications growing rapidly in the automotive industry. Many vehicle designs use CAN, LIN or FlexRay
Debugging CAN, LIN, and FlexRay Automotive Buses with an Oscilloscope Introduction Embedded systems applications growing rapidly in the automotive industry. Many vehicle designs use CAN, LIN or FlexRay
or between microcontrollers)
") : Communication Interfaces in Embedded Systems (e.g., to interface with sensors and actuators or between microcontrollers) Spring 2016 : Communication Interfaces in Embedded Systems Spring (e.g., 2016
: Communication Interfaces in Embedded Systems (e.g., to interface with sensors and actuators or between microcontrollers) Spring 2016 : Communication Interfaces in Embedded Systems Spring (e.g., 2016
Simplify CAN and LIN In-vehicle Network Testing
 Simplify CAN and LIN In-vehicle Network Testing An in-vehicle network integrates many modules that interact with the environment, and process high and low speed information. As a result, testing this network
Simplify CAN and LIN In-vehicle Network Testing An in-vehicle network integrates many modules that interact with the environment, and process high and low speed information. As a result, testing this network
BMW Group Technology Office Palo Alto Automotive Use Cases AVB in a vehicular environment.
 1722.1 Automotive Use Cases. 802.1 AVB in a vehicular environment. Current Car Bus Technologies. 1. Current Car Bus/Link Technologies 2. Future Ethernet Use Cases 3. Key Requirements and Assumptions 4.
1722.1 Automotive Use Cases. 802.1 AVB in a vehicular environment. Current Car Bus Technologies. 1. Current Car Bus/Link Technologies 2. Future Ethernet Use Cases 3. Key Requirements and Assumptions 4.
Communication Networks for the Next-Generation Vehicles
 Communication Networks for the, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 (313) 577-3855, smahmud@eng.wayne.edu January 13, 2005 4 th Annual Winter Workshop U.S.
Communication Networks for the, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 (313) 577-3855, smahmud@eng.wayne.edu January 13, 2005 4 th Annual Winter Workshop U.S.
Multidrop Ethernet for In-cabinet Applications
 Multidrop Ethernet for In-cabinet Applications David D. Brandt Rockwell Automation IEEE P802.3cg 10 Mb/s Single Twisted Pair Ethernet Task Force Mar. 2017 Plenary Meeting, Vancouver, BC Canada Page 1 Purpose
Multidrop Ethernet for In-cabinet Applications David D. Brandt Rockwell Automation IEEE P802.3cg 10 Mb/s Single Twisted Pair Ethernet Task Force Mar. 2017 Plenary Meeting, Vancouver, BC Canada Page 1 Purpose
ISO INTERNATIONAL STANDARD. Road vehicles FlexRay communications system Part 4: Electrical physical layer specification
 INTERNATIONAL STANDARD ISO 17458-4 First edition 2013-02-01 Road vehicles FlexRay communications system Part 4: Electrical physical layer specification Véhicules routiers Système de communications FlexRay
INTERNATIONAL STANDARD ISO 17458-4 First edition 2013-02-01 Road vehicles FlexRay communications system Part 4: Electrical physical layer specification Véhicules routiers Système de communications FlexRay
Design of the Control System about Central Signals in Electric Vehicle
 J. Electromagnetic Analysis & Applications, 2010, 2: 189-194 doi:10.4236/jemaa.2010.23027 Published Online March 2010 (http://www.scirp.org/journal/jemaa) 1 Design of the Control System about Central Signals
J. Electromagnetic Analysis & Applications, 2010, 2: 189-194 doi:10.4236/jemaa.2010.23027 Published Online March 2010 (http://www.scirp.org/journal/jemaa) 1 Design of the Control System about Central Signals
Ultra-Low Latency Shaper
 Ultra-Low Latency Shaper Christian Boiger christian.boiger@fh-deggendorf.de IEEE 802 Plenary July 2011 San Francisco, CA 1 Why Is a Ultra-Low Latency Class Necessary? Current priority of traffic classes
Ultra-Low Latency Shaper Christian Boiger christian.boiger@fh-deggendorf.de IEEE 802 Plenary July 2011 San Francisco, CA 1 Why Is a Ultra-Low Latency Class Necessary? Current priority of traffic classes
ISO INTERNATIONAL STANDARD. Road vehicles Controller area network (CAN) Part 3: Low-speed, fault-tolerant, medium-dependent interface
 Part 3: Low-speed, fault-tolerant, medium-dependent interface") INTERNATIONAL STANDARD ISO 11898-3 First edition 2006-06-01 Road vehicles Controller area network (CAN) Part 3: Low-speed, fault-tolerant, medium-dependent interface Véhicules routiers Gestionnaire de
INTERNATIONAL STANDARD ISO 11898-3 First edition 2006-06-01 Road vehicles Controller area network (CAN) Part 3: Low-speed, fault-tolerant, medium-dependent interface Véhicules routiers Gestionnaire de
In Vehicle Networking : a Survey and Look Forward
 In Vehicle Networking : a Survey and Look Forward Nicolas Navet Workshop on Specialized Networks, ETFA09, Palma, Spain - 25/09/2009 Complexity Mastered Outline 1. Architecture of Automotive Embedded Systems
In Vehicle Networking : a Survey and Look Forward Nicolas Navet Workshop on Specialized Networks, ETFA09, Palma, Spain - 25/09/2009 Complexity Mastered Outline 1. Architecture of Automotive Embedded Systems
Communication in Avionics
 Communication in Avionics 1 Outline Basic Overview Communication architectures Event Triggered Time Triggered Communication architecture examples Case Study: How Data Communication Affects Scheduling 2
Communication in Avionics 1 Outline Basic Overview Communication architectures Event Triggered Time Triggered Communication architecture examples Case Study: How Data Communication Affects Scheduling 2
Operating Systems, Concurrency and Time. real-time communication and CAN. Johan Lukkien
 Operating Systems, Concurrency and Time real-time communication and CAN Johan Lukkien (Courtesy: Damir Isovic, Reinder Bril) Question Which requirements to communication arise from real-time systems? How
Operating Systems, Concurrency and Time real-time communication and CAN Johan Lukkien (Courtesy: Damir Isovic, Reinder Bril) Question Which requirements to communication arise from real-time systems? How
Data Link Layer Technologies
 Chapter 2.2 La 2 Data Link La Technologies 1 Content Introduction La 2: Frames Error Handling 2 Media Access Control General approaches and terms Aloha Principles CSMA, CSMA/CD, CSMA / CA Master-Slave
Chapter 2.2 La 2 Data Link La Technologies 1 Content Introduction La 2: Frames Error Handling 2 Media Access Control General approaches and terms Aloha Principles CSMA, CSMA/CD, CSMA / CA Master-Slave
Understanding and Using the Controller Area Network Communication Protocol
 Marco Di Natale Haibo Zeng Paolo Giusto Arkadeb Ghosal Understanding and Using the Controller Area Network Communication Protocol Theory and Practice ^Spri ringer Contents..? 1 The CAN 2.0b Standard 1
Marco Di Natale Haibo Zeng Paolo Giusto Arkadeb Ghosal Understanding and Using the Controller Area Network Communication Protocol Theory and Practice ^Spri ringer Contents..? 1 The CAN 2.0b Standard 1
CAN Driver Trends and Solutions for Higher Data Rate and Energy Savings
 CAN Driver Trends and Solutions for Higher Data Rate and Energy Savings FTF-AUT-F0262 Dan Lenskold Product Line Manager A P R I L 0 9, 2 0 1 4 TM External Use Agenda CAN Market Overview and Trends Evolution
CAN Driver Trends and Solutions for Higher Data Rate and Energy Savings FTF-AUT-F0262 Dan Lenskold Product Line Manager A P R I L 0 9, 2 0 1 4 TM External Use Agenda CAN Market Overview and Trends Evolution
Design of Serial Interface for Neuron Base Smart Sensors
 Design of Serial Interface for Neuron Base Smart Sensors B. Donchev, Member, IEEE, K. Hristov, Member, IEEE, A. Cordery Member, IEEE and M. Hristov, Member, IEEE Abstract LIN interface module for neuron
Design of Serial Interface for Neuron Base Smart Sensors B. Donchev, Member, IEEE, K. Hristov, Member, IEEE, A. Cordery Member, IEEE and M. Hristov, Member, IEEE Abstract LIN interface module for neuron
Controller Area Network
 Controller Area Network 1 CAN FUNDAMENTALS...3 1.1 USER BENEFITS...3 1.1.1 CAN is low cost...3 1.1.2 CAN is reliable...3 1.1.3 CAN means real-time...3 1.1.4 CAN is flexible...3 1.1.5 CAN means Multicast
Controller Area Network 1 CAN FUNDAMENTALS...3 1.1 USER BENEFITS...3 1.1.1 CAN is low cost...3 1.1.2 CAN is reliable...3 1.1.3 CAN means real-time...3 1.1.4 CAN is flexible...3 1.1.5 CAN means Multicast
This document is a preview generated by EVS
 INTERNATIONAL STANDARD ISO 17458-2 First edition 2013-02-01 Road vehicles FlexRay communications system Part 2: Data link layer specification Véhicules routiers Système de communications FlexRay Partie
INTERNATIONAL STANDARD ISO 17458-2 First edition 2013-02-01 Road vehicles FlexRay communications system Part 2: Data link layer specification Véhicules routiers Système de communications FlexRay Partie
FlexRay Requirements Specification
 FlexRay - Requirements Specification FlexRay Requirements Specification Authors: Ralf Belschner 2, Josef Berwanger 1, Christian Ebner 1, Harald Eisele 4, Sven Fluhrer 2, Thomas Forest 4, Thomas Führer
FlexRay - Requirements Specification FlexRay Requirements Specification Authors: Ralf Belschner 2, Josef Berwanger 1, Christian Ebner 1, Harald Eisele 4, Sven Fluhrer 2, Thomas Forest 4, Thomas Führer
Lecture Computer Networks
 Prof. Dr. H. P. Großmann mit M. Rabel sowie H. Hutschenreiter und T. Nau Sommersemester 2012 Institut für Organisation und Management von Informationssystemen Lecture Computer Networks Networks for Multimedia
Prof. Dr. H. P. Großmann mit M. Rabel sowie H. Hutschenreiter und T. Nau Sommersemester 2012 Institut für Organisation und Management von Informationssystemen Lecture Computer Networks Networks for Multimedia
A specification proposed by JASPAR has been adopted for AUTOSAR.
 Japan Automotive Software Platform and Architecture A specification proposed by JASPAR has been adopted for AUTOSAR. JASPAR General Incorporated Association 1. Introduction An RTE profile specification
Japan Automotive Software Platform and Architecture A specification proposed by JASPAR has been adopted for AUTOSAR. JASPAR General Incorporated Association 1. Introduction An RTE profile specification
FDDI. L26 - Fibre Distributed Data Interface (FDDI) L26 - Fibre Distributed Data Interface (FDDI) FDDI - Fiber Distributed Data Interface
 L26 - Fibre Distributed Data Interface (FDDI) FDDI - Fiber Distributed Data Interface") FDDI - Fiber Distributed Data Interface FDDI Fiber Distributed Data Interface Principles, Framing and Procedures set of standards defining a shared media 100 Mbps LAN (MAN) main topology: dual ring of
FDDI - Fiber Distributed Data Interface FDDI Fiber Distributed Data Interface Principles, Framing and Procedures set of standards defining a shared media 100 Mbps LAN (MAN) main topology: dual ring of
In-Vehicle Network Architecture for the Next-Generation Vehicles SAE TECHNICAL PAPER SERIES
 2005-01-1531 SAE TECHNICAL PAPER SERIES In- Network Architecture for the Next-Generation s Syed Masud Mahmud Department of Electrical & Computer Engineering, Wayne State University Sheran Alles Ford Motor
2005-01-1531 SAE TECHNICAL PAPER SERIES In- Network Architecture for the Next-Generation s Syed Masud Mahmud Department of Electrical & Computer Engineering, Wayne State University Sheran Alles Ford Motor
Sri Vidya College of Engineering and Technology. EC6703 Embedded and Real Time Systems Unit IV Page 1.
 Sri Vidya College of Engineering and Technology ERTS Course Material EC6703 Embedded and Real Time Systems Page 1 Sri Vidya College of Engineering and Technology ERTS Course Material EC6703 Embedded and
Sri Vidya College of Engineering and Technology ERTS Course Material EC6703 Embedded and Real Time Systems Page 1 Sri Vidya College of Engineering and Technology ERTS Course Material EC6703 Embedded and
Chances and challenges
 Chances and challenges CAN FD for commercial vehicles Holger Zeltwanger Commercial vehicles CAN in mobile machinery Truck network architecture Trunk, fuel Switches CAN (FD) Instrumentation train (125 or
Chances and challenges CAN FD for commercial vehicles Holger Zeltwanger Commercial vehicles CAN in mobile machinery Truck network architecture Trunk, fuel Switches CAN (FD) Instrumentation train (125 or
MATLAB Expo Simulation Based Automotive Communication Design using MATLAB- SimEvent. Sudhakaran M Anand H General Motors
 MATLAB Expo 2013 Simulation Based Automotive Communication Design using MATLAB- SimEvent Sudhakaran M Anand H General Motors 1 Agenda Introduction Different Analysis Methods Analytical vs. Simulation Approach
MATLAB Expo 2013 Simulation Based Automotive Communication Design using MATLAB- SimEvent Sudhakaran M Anand H General Motors 1 Agenda Introduction Different Analysis Methods Analytical vs. Simulation Approach
Renesas LIN Overview. White paper REU05B Introduction
 White paper Introduction LIN is a communication and distributed processing bus system. It is characterized by low cost hardware and a relatively low data transmission speed and number of bus nodes. Only
White paper Introduction LIN is a communication and distributed processing bus system. It is characterized by low cost hardware and a relatively low data transmission speed and number of bus nodes. Only
Overview. Rev. 1.5c. November 17, 2003
 Overview Rev. 1.5c November 17, 2003 Copyright 2003 Digigram. All rights reserved. No portion of this document may be reproduced without prior written consent from Digigram. The copyright protection claimed
Overview Rev. 1.5c November 17, 2003 Copyright 2003 Digigram. All rights reserved. No portion of this document may be reproduced without prior written consent from Digigram. The copyright protection claimed
An Introduction to CAN by Peter Bagschik (I+ME ACTIA)
") 1 of 11 24.10.00 14:36 An Introduction to CAN by Peter Bagschik (I+ME ACTIA) The CAN (Controller Area Network) protocol was developed in Europe for the use in passenger cars. Through the successful use
1 of 11 24.10.00 14:36 An Introduction to CAN by Peter Bagschik (I+ME ACTIA) The CAN (Controller Area Network) protocol was developed in Europe for the use in passenger cars. Through the successful use
Overvoltage protection with PROTEK TVS diodes in automotive electronics
 Ian Doyle Protek / Zoltán Kiss Endrich Bauelemente Vertriebs GmbH Overvoltage protection with PROTEK TVS diodes in automotive electronics A utomotive electronics is maybe the area of the automotive industry,
Ian Doyle Protek / Zoltán Kiss Endrich Bauelemente Vertriebs GmbH Overvoltage protection with PROTEK TVS diodes in automotive electronics A utomotive electronics is maybe the area of the automotive industry,
Various Emerging Time- Triggered Protocols for Driveby-Wire
 Various Emerging Time- Triggered for Driveby-Wire Applications Syed Masud Mahmud, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 smahmud@eng.wayne.edu January 11, 2007
Various Emerging Time- Triggered for Driveby-Wire Applications Syed Masud Mahmud, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 smahmud@eng.wayne.edu January 11, 2007
CAN protocol enhancement
 Protocols CAN protocol enhancement This article describes the enhanced CAN protocol called CAN-HG and the features of the IC circuitry from Canis that implement it. CAN-HG has been designed to meet two
Protocols CAN protocol enhancement This article describes the enhanced CAN protocol called CAN-HG and the features of the IC circuitry from Canis that implement it. CAN-HG has been designed to meet two
Basics of UART Communication
 Basics of UART Communication From: Circuit Basics UART stands for Universal Asynchronous Receiver/Transmitter. It s not a communication protocol like SPI and I2C, but a physical circuit in a microcontroller,
Basics of UART Communication From: Circuit Basics UART stands for Universal Asynchronous Receiver/Transmitter. It s not a communication protocol like SPI and I2C, but a physical circuit in a microcontroller,
Controller Area Network (CAN)
") Controller Area Network (CAN) EECS 461, Fall 2008 J. A. Cook J. S. Freudenberg 1 Introduction Up until now, we ve considered our embedded control system to be self-contained: an algorithm implemented in
Controller Area Network (CAN) EECS 461, Fall 2008 J. A. Cook J. S. Freudenberg 1 Introduction Up until now, we ve considered our embedded control system to be self-contained: an algorithm implemented in
Build a Driver Information System with IoT Technology
 Build a Driver Information System with IoT Technology FTF-AUT-F0482 Jack Xu BD marketing, Asia Pacific MAY.2014 TM External Use Agenda Connected Car and Automotive IoT Infotainment Trend Car Network Trend
Build a Driver Information System with IoT Technology FTF-AUT-F0482 Jack Xu BD marketing, Asia Pacific MAY.2014 TM External Use Agenda Connected Car and Automotive IoT Infotainment Trend Car Network Trend
Growing Together Globally Serial Communication Design In Embedded System
 Growing Together Globally Serial Communication Design In Embedded System Contents Serial communication introduction......... 01 The advantages of serial design......... 02 RS232 interface......... 04 RS422
Growing Together Globally Serial Communication Design In Embedded System Contents Serial communication introduction......... 01 The advantages of serial design......... 02 RS232 interface......... 04 RS422
Automotive and highly dependable Networks!
 Automotive and highly dependable Networks H. Kopetz, TU Wien (see references in the introduction) Excellent surveys: TTP: Hermann Kopetz, Günther Bauer: "The Time-Triggered Architecture" http://www.tttech.com/technology/docs/history/hk_2002-10-tta.pdf
Automotive and highly dependable Networks H. Kopetz, TU Wien (see references in the introduction) Excellent surveys: TTP: Hermann Kopetz, Günther Bauer: "The Time-Triggered Architecture" http://www.tttech.com/technology/docs/history/hk_2002-10-tta.pdf
A Reliable Gateway for In-vehicle Networks
 Proceedings of the 17th World Congress The International Federation of Automatic Control A Reliable Gateway for In-vehicle Networks S. H. Seo*, J. H. Kim*, T. Y. Moon* S. H. Hwang**, K. H. Kwon*, J. W.
Proceedings of the 17th World Congress The International Federation of Automatic Control A Reliable Gateway for In-vehicle Networks S. H. Seo*, J. H. Kim*, T. Y. Moon* S. H. Hwang**, K. H. Kwon*, J. W.
Introduction to Real-Time Communications. Real-Time and Embedded Systems (M) Lecture 15
 Lecture 15") Introduction to Real-Time Communications Real-Time and Embedded Systems (M) Lecture 15 Lecture Outline Modelling real-time communications Traffic and network models Properties of networks Throughput, delay
Introduction to Real-Time Communications Real-Time and Embedded Systems (M) Lecture 15 Lecture Outline Modelling real-time communications Traffic and network models Properties of networks Throughput, delay
Introduction to Controller Area Network (CAN)
") Introduction to Controller Area Network (CAN) 2003 Microchip Technology Incorporated. All Rights Reserved. Introduction to Controller Area Network (CAN) 1 Topics CAN Protocol Overview What is CAN? CAN
Introduction to Controller Area Network (CAN) 2003 Microchip Technology Incorporated. All Rights Reserved. Introduction to Controller Area Network (CAN) 1 Topics CAN Protocol Overview What is CAN? CAN
Trends in Automotive Communication Systems
 Trends in Automotive Communication Systems NICOLAS NAVET, YEQIONG SONG, FRANÇOISE SIMONOT-LION, AND CÉDRIC WILWERT Invited Paper The use of networks for communications between the electronic control units
Trends in Automotive Communication Systems NICOLAS NAVET, YEQIONG SONG, FRANÇOISE SIMONOT-LION, AND CÉDRIC WILWERT Invited Paper The use of networks for communications between the electronic control units
CAN-FD Flexible Data Rate CAN
 FD CAN-FD Flexible Data Rate CAN A Short Primer and Update V. 202-08-27 Agenda > Why CAN-FD? What is CAN-FD? Basic Concepts CAN-FD Specifics Data Frame Operating Modes/States Physical Layer Considerations
FD CAN-FD Flexible Data Rate CAN A Short Primer and Update V. 202-08-27 Agenda > Why CAN-FD? What is CAN-FD? Basic Concepts CAN-FD Specifics Data Frame Operating Modes/States Physical Layer Considerations
Comparison of In-Vehicle Communication Protocols for Critical Applications
 IVSS-2005-ARC-03 Comparison of In-Vehicle Communication Protocols for Critical Applications Edward Robert Gundlach and Syed Masud Mahmud Electrical and Computer Engineering Department, Wayne State University,
IVSS-2005-ARC-03 Comparison of In-Vehicle Communication Protocols for Critical Applications Edward Robert Gundlach and Syed Masud Mahmud Electrical and Computer Engineering Department, Wayne State University,
Design and Performance Evaluation of a New Spatial Reuse FireWire Protocol. Master s thesis defense by Vijay Chandramohan
 Design and Performance Evaluation of a New Spatial Reuse FireWire Protocol Master s thesis defense by Vijay Chandramohan Committee Members: Dr. Christensen (Major Professor) Dr. Labrador Dr. Ranganathan
Design and Performance Evaluation of a New Spatial Reuse FireWire Protocol Master s thesis defense by Vijay Chandramohan Committee Members: Dr. Christensen (Major Professor) Dr. Labrador Dr. Ranganathan
Embedded Systems: Hardware Components (part II) Todor Stefanov
 Todor Stefanov") Embedded Systems: Hardware Components (part II) Todor Stefanov Leiden Embedded Research Center, Leiden Institute of Advanced Computer Science Leiden University, The Netherlands Outline Generic Embedded
Embedded Systems: Hardware Components (part II) Todor Stefanov Leiden Embedded Research Center, Leiden Institute of Advanced Computer Science Leiden University, The Netherlands Outline Generic Embedded
DeviceNet - CIP on CAN Technology
 The CIP Advantage Technology Overview Series DeviceNet - CIP on CAN Technology DeviceNet has been solving manufacturing automation applications since the mid-1990's, and today boasts an installed base
The CIP Advantage Technology Overview Series DeviceNet - CIP on CAN Technology DeviceNet has been solving manufacturing automation applications since the mid-1990's, and today boasts an installed base
ARM processors driving automotive innovation
 ARM processors driving automotive innovation Chris Turner Director of advanced technology marketing, CPU group ARM tech forums, Seoul and Taipei June/July 2016 The ultimate intelligent connected device
ARM processors driving automotive innovation Chris Turner Director of advanced technology marketing, CPU group ARM tech forums, Seoul and Taipei June/July 2016 The ultimate intelligent connected device
APPLICATIONS FLEXRAY AND ITS WILEY REAL TIME MULTIPLEXED NETWORK. Dominique Paret. dp-consulting, Paris, France. Claygate, Esher, UK
 FLEXRAY AND ITS APPLICATIONS REAL TIME MULTIPLEXED NETWORK Dominique Paret dpconsulting, Paris, France Translated by Bill Chilcott Fellow of the Institute of Translation and Interpreting Claygate, Esher,
FLEXRAY AND ITS APPLICATIONS REAL TIME MULTIPLEXED NETWORK Dominique Paret dpconsulting, Paris, France Translated by Bill Chilcott Fellow of the Institute of Translation and Interpreting Claygate, Esher,
RS485 3 click. How does it work? PID: MIKROE-2821
 RS485 3 click PID: MIKROE-2821 RS485 3 click is an RS422/485 transceiver Click board, which can be used as an interface between the TTL level UART and the RS422/485 communication bus. It features a full-duplex
RS485 3 click PID: MIKROE-2821 RS485 3 click is an RS422/485 transceiver Click board, which can be used as an interface between the TTL level UART and the RS422/485 communication bus. It features a full-duplex
Application Note No. 104
 Application Note, Rev. 1.0, August 2007 Application Note No. 104 2-channel bi/uni-directional TVS diodes for ESD protection in /LIN bus applications ESD24VS2B, ESD24VS2U Small Signal Discretes Edition
Application Note, Rev. 1.0, August 2007 Application Note No. 104 2-channel bi/uni-directional TVS diodes for ESD protection in /LIN bus applications ESD24VS2B, ESD24VS2U Small Signal Discretes Edition
CS263: Wireless Communications and Sensor Networks
 CS263: Wireless Communications and Sensor Networks Matt Welsh Lecture 6: Bluetooth and 802.15.4 October 12, 2004 2004 Matt Welsh Harvard University 1 Today's Lecture Bluetooth Standard for Personal Area
CS263: Wireless Communications and Sensor Networks Matt Welsh Lecture 6: Bluetooth and 802.15.4 October 12, 2004 2004 Matt Welsh Harvard University 1 Today's Lecture Bluetooth Standard for Personal Area
Module 5. Broadcast Communication Networks. Version 2 CSE IIT, Kharagpur
 Module 5 Broadcast Communication Networks Lesson 5 High Speed LANs Token Ring Based Specific Instructional Objectives On completion, the student will be able to: Explain different categories of High Speed
Module 5 Broadcast Communication Networks Lesson 5 High Speed LANs Token Ring Based Specific Instructional Objectives On completion, the student will be able to: Explain different categories of High Speed
ETHERNET AS AN EMERGING TREND IN VEHICLE NETWORK TECHNOLOGY PART II
 ETHERNET AS AN EMERGING TREND IN VEHICLE NETWORK TECHNOLOGY PART II In the second part of this paper on Ethernet as an emerging trend in vehicle network technology, we look at the challenges and the progress
ETHERNET AS AN EMERGING TREND IN VEHICLE NETWORK TECHNOLOGY PART II In the second part of this paper on Ethernet as an emerging trend in vehicle network technology, we look at the challenges and the progress
Is this presentation suited for you?
 bus protection Is this presentation suited for you? 2 Where do you stand with bus protection? Beginner? I am not familiar with this subject. I am in the discovery phase and would like an overview and a
bus protection Is this presentation suited for you? 2 Where do you stand with bus protection? Beginner? I am not familiar with this subject. I am in the discovery phase and would like an overview and a
Holger Zeltwanger CAN CAN. protocol and its impacts on CANopen. CiA
 Holger Zeltwanger CAN FD protocol and its impacts on CANopen CAN with flexible data-rate In-bit-time detection Free transmission In-bit-time detection Arbitration phase Data transmission phase ACK phase
Holger Zeltwanger CAN FD protocol and its impacts on CANopen CAN with flexible data-rate In-bit-time detection Free transmission In-bit-time detection Arbitration phase Data transmission phase ACK phase
By Ambuj Varshney & Akshat Logar
 By Ambuj Varshney & Akshat Logar Wireless operations permits services, such as long range communications, that are impossible or impractical to implement with the use of wires. The term is commonly used
By Ambuj Varshney & Akshat Logar Wireless operations permits services, such as long range communications, that are impossible or impractical to implement with the use of wires. The term is commonly used
Topics. Link Layer Services (more) Link Layer Services LECTURE 5 MULTIPLE ACCESS AND LOCAL AREA NETWORKS. flow control: error detection:
 Link Layer Services LECTURE 5 MULTIPLE ACCESS AND LOCAL AREA NETWORKS. flow control: error detection:") 1 Topics 2 LECTURE 5 MULTIPLE ACCESS AND LOCAL AREA NETWORKS Multiple access: CSMA/CD, CSMA/CA, token passing, channelization LAN: characteristics, i basic principles i Protocol architecture Topologies
1 Topics 2 LECTURE 5 MULTIPLE ACCESS AND LOCAL AREA NETWORKS Multiple access: CSMA/CD, CSMA/CA, token passing, channelization LAN: characteristics, i basic principles i Protocol architecture Topologies
Communication Technologies and Network Protocols of Automotive Systems
 Advances in Networks 2018; 6(1): 58-65 http://www.sciencepublishinggroup.com/j/net doi: 10.11648/j.net.20180601.15 ISSN: 2326-9766 (Print); ISSN: 2326-9782 (Online) Review Article Communication Technologies
Advances in Networks 2018; 6(1): 58-65 http://www.sciencepublishinggroup.com/j/net doi: 10.11648/j.net.20180601.15 ISSN: 2326-9766 (Print); ISSN: 2326-9782 (Online) Review Article Communication Technologies
Goals and prospects of embedded electronic automotive systems
 Goals and prospects of embedded electronic automotive systems Joseph Beretta Division of Research and Automotive Innovation Manager Automotive Science & Advance Research Electromechanically, Electrochemistry,
Goals and prospects of embedded electronic automotive systems Joseph Beretta Division of Research and Automotive Innovation Manager Automotive Science & Advance Research Electromechanically, Electrochemistry,