Section 4. Imaging and Paraxial Optics
|
|
|
- Louise Douglas
- 5 years ago
- Views:
Transcription
1 4-1 Sectio 4 Imagig ad Paraxial Optics

2 Optical Sstems A optical sstem is a collectio of optical elemets (leses ad mirrors). While the optical sstem ca cotai multiple optical elemets, the first order properties of the sstem are characteried b a sigle focal legth or magificatio. 4-2 leses.eiss.com



3 4-3 tf.ui-kiel.de oddstuffmagaie.com Optical Sstems base24.com


4 Mappigs A mappig is a coversio or trasformatio from oe represetatio to aother represetatio. 4-4 progoos.com





5 Color Mappigs Color to Grascale: False-color: I mapped to a visible color Wikipedia Pseudo-color: stackoverflow.com 4-5 Differet tissues are displaed as differet colors.
6 Imagig as a Mappig First-order optics is the optics of perfect imagig sstems. Aberratios are igored. The object is mapped or trasformed to its image. The process ca be aaled without kowig the details of the optical sstem. A small umber of sstem properties will completel defie ad determie the mappig or first-order imagig properties. These are kow as the cardial poits of the imagig sstem. 4-6 This is a mappig from object space to image space. Image from: supercolorig.com
7 Imagig Goal: Determie the sie, orietatio ad locatio of a image for a give object. This is the optics of perfect imagig sstems; aberratios are igored. Colliear Trasformatio A geeralied mappig from oe space ito aother i which poits map to poits, lies map to lies, ad plaes map to plaes. Gaussia Imager A specific colliear trasformatio usig assumptios that are appropriate for optical sstems. The cardial poits result. First-Order Optics The actual ra paths through a sstem ca be expaded i a power series of heights ad agles. A axiall smmetric sstem will have ol odd power terms, ad the first-order terms give the positio ad sie of the image. First-order optics is the optics of perfect optical sstems. The deviatios from this perfectio are the sstem aberratios. Paraxial Optics A method of determiig the first-order properties of a optical sstem b tracig ras usig the slopes of the ras istead of the ra agles. The agles of icidece ad refractio or reflectio at surfaces are assumed to be small. The sag* of the refractig or reflectig surface is igored or is cosidered to be egligible compared to other distaces. 4-7 Paraxial aalsis is also useful for relatig the phsical properties of a refractig or reflectig surface (curvature ad idex) to its Gaussia properties (focal legth ad cardial poits). Fortuatel, all of these theories are cosistet ad give the same results. *The sag of a surface is the separatio of the surface from a plae taget to the surface vertex.
8 Optical Spaces Each time a refractig or reflectig surface is ecoutered, a ew optical space is etered. Each space exteds from to ad has a associated idex. If a sstem has N surfaces, there will be N+1 optical spaces. The first space is usuall called object space ad the last is called image space. Surface: Object Space ' 2 2' 3 3' 4 4' 5 5' 0 0' = I Image Space 4-8 A sigle object or image exists i each space. Each surface has a object space ad image space of its ow. These itermediate optical spaces serve as the image space for the precedig surface ad the object space for the followig surface. Each surface will form a image of the object i the precedig space. There are real ad virtual segmets of each optical space. The real segmet of a optical space is the volume betwee surfaces defiig etr ad exit ito that space.
9 eal ad Virtual as ca be traced from optical space to optical space. Withi a optical space, a ra is straight ad exteds from to with real ad virtual segmets. as from adjoiig spaces meet at the commo optical surface. 1 2 A real object is to the left of the surface; a virtual object is to the right of the surface. A real image is to the right of the surface; a virtual image is to the left of the surface. I a optical space with a egative idex (light propagates from right to left), left ad right are reversed i these descriptios of real ad virtual. 4-9 Alterate descriptio: If a object is upstream of the surface or sstem, it is cosidered to be real. A dowstream object is virtual. Images dowstream of the surface or sstem are real; images upstream are virtual. It is also commo to combie multiple optical surfaces ito a sigle sstem elemet ad ol cosider the object ad image spaces of the elemet; the itermediate spaces withi the elemet are the igored.
10 eal ad Virtual Cofusio The distictios betwee real ad virtual ma become cofused whe discussig itermediate optical spaces. eal ad virtual ca be discussed either from the perspective of a sigle surface or from the perspective of the sstem. For example, it is commo for the real image created b oe surface to serve as a virtual object for the ext surface. 1 The real image formed b Surface 1 becomes virtual due to the presece of Surface 2, ad this image serves as the virtual object for Surface I a similar maer, the virtual image produced b Surface 3 ca be cosidered to be a real object for Surface 4.
11 Geeral Sstem Cosider a black-box model of a optical sstem. A optical sstem is a collectio of optical elemets (leses, mirrors, etc.) comprisig a rotatioall smmetric optical sstem. A ra from a object at ifiit will emerge from the sstem ad go through the ear Focal Poit of the sstem F': F 4-11
12 Plaes of Effective efractio B extedig the image space ra back to the height of the object space ra, the plae of effective refractio ito image space for the sstem is foud. All of the refractios at the idividual elemets withi the sstem are combied ito a sigle effective refractio. P F 4-12 f This plae of effective refractio ito image space is called the ear Pricipal Plae P'. The distace from the ear Pricipal Plae to the ear Focal Poit is the ear Focal Legth of the sstem f.
13 Plaes of Effective efractio I a similar maer, the plae of effective refractio out of object space ca be foud b usig a ra startig at the Frot Focal Poit of the sstem F. The image ra is parallel to the axis. F f F P 4-13 This plae of effective refractio out of object space is called the Frot Pricipal Plae P. The distace from the Frot Pricipal Plae to the Frot Focal Poit is the Frot Focal Legth of the sstem. f F
14 Plaes of Effective efractio For the sstem used at fiite cojugates, the ra from the object poit will appear to refract at the Frot Priciple Plae ad emerge from the ear Pricipal Plae at the same height. The image poit is located where this ra crosses the axis. O P P O 4-14 The object ad image distaces ad ' are measured from the respective Pricipal Plaes. This treatmet allows the sstem to be cosidered to be just like a thi les except the refractio occurs at separated plaes of effective refractio.
15 Paraxial Optics I order to relate the phsical parameters of a optical sstem (radii of curvature of surfaces, spacigs ad thickesses) to its imagig properties, ras must be traced through the sstem usig Sell s law or the law of reflectio. While exact ratracig ca be used, the first-order or imagig properties of the sstem ca be foud usig the approximate ra paths computed b paraxial optics. as are traced usig the slopes of the ras istead of the ra agles. The amout a ra is bet at the refractig or reflectig surface is assumed to be small. The sag of the refractig or reflectig surface is igored or is cosidered to be egligible compared to other distaces. The radius of curvature of a surface is defied to be the distace from its vertex to its ceter of curvature CC. The sag of a surface is measured relative to a plae taget to the surface vertex V. The sag will var with the radial positio o the surface. Sag V Surface CC 4-15 Ceter of Curvature
16 Sigle efractig Surface Cosider a sigle refractig surface with a radius of curvature of that separates a idex of refractio from ad idex of refractio '. The agles of icidece ad refractio (I ad I') are measured with respect to the surface ormal. The ra agles U ad U', as well as the elevatio agle A of the surface ormal at the ra itersectio are measured with respect to the optical axis. The usual sig covetios appl. O U 1 Curvature C I V Sag efractig Surface I' A = 1/C CC U' ' Ceter of Curvature O' 4-16
17 Sigle efractig Surface U U O A V I A Sag efractig Surface I' A = 1/C U' CC U' 1 Curvature C ' Ceter of Curvature O' 4-17 elatig the agles at the ra itersectio with the surface: A U I I U A I U A Appl Sell s Law: si I si I si si U A U A
18 Sigle efractig Surface ad Sell s Law si I si I si si U A U A si cos cos si si cos cos si U A U A U A U A si A si A siu cosu siucosu cos A cos A si cos ta si cos ta U U A U U A 4-18 Approximatio #1: cosu cosu siu siu ta A ta A cosu cosu ta ta ta ta U A U A Approximatio #1 implies that the ra bedig at the surface is small.
19 Paraxial Agles ta ta ta ta U A U A Defie the paraxial agles: u tau utau ta A u u u u 4-19 Paraxial agles are the tagets of the real ra agles ad are the slopes of the ras. Paraxial agles are ot agles ad are icorrectl called agles ol because of traditio. Paraxial agles are ra slopes. Paraxial agles are uitless.
20 Power of a Surface ad Paraxial atrace Equatio u u ta A Sag Approximatio #2: Sag u u uc V Sag ' A = 1/C CC Approximatio #2 implies that the sag of the surface at the ra itersectio is much less tha the radius of curvature of the surface Defie the Power of the surface: u u C This is the Paraxial atrace Equatio. Note that the power of the surface depeds ol o the costructio parameters (,, ') of the surface. It is ra idepedet.
21 Object ad Image distaces for a Sigle efractig Surface The object ad image distaces ( ad ') are also both measured from the surface vertex. O U Vertex Plae V Sag efractig Surface A CC U' ' O' 4-21 ' Approximatio #3: The object ad image distaces are much greater tha the sag of the surface at the ra itersectio. Sag Sag u tau Sag u tau Sag
22 Surface Vertex Plae ad Pricipal Plaes Approximatios #2 ad #3 state that the sag is cosidered to be small with respect to the radius of curvature of the surface ad with respect to the object ad image distaces. Sice these coditios are ol trul met for small ra heights o the surface, this method of aalsis is called paraxial optics or paraxial ratracig. Paraxial meas ear axis. B igorig the surface sag i paraxial optics, the plaes of effective refractio for the sigle refractig surface are located at the surface vertex plae V. The Frot ad ear Pricipal Plaes (P ad P') of the surface are both located at the surface. Here, the paraxial agles u ad u' are show with the refractio at the vertex plae. The paraxial ras show approximate the actual ras as the surface sag is igored. efractio is cosidered to occur at the surface vertex. Vertex Plae efractig Surface ' 4-22 O u u u P V P' ' u' O' This is the paraxial model of refractio at a surface with power.
23 Imagig ad Focal Legths of a Sigle efractig Surface u u- Object at Ifiit Image at the ear Focal Poit u u ad ' are measured from the surface vertex or the Pricipal Plaes. Image at Ifiit Object at the Frot Focal Poit 4-23 f f F f f f f F F f f F f f F
24 Object-Image elatioship ad the Focal legth f f F Defie the THE Focal Legth, also called the Effective (or Equivalet) Focal Legth EFL: 1 ff f fe 1 f E 1 f f Note that the focal legth f is the reduced frot ad rear focal legths The effective or equivalet i EFL is actuall uecessar. There is a sigle focal legth f. The frot ad rear focal legths are related to the focal legth through the idices of refractio: ff fe f f fe f
25 Surface Sag Sag Circle (or Sphere): 2 Sag 2 2 The surface sag is the measure of the surface shape relative to a plae. CC Sag Sag Sag Sag 0 2 Sag 2 This is the parabolic approximatio for a circle or sphere.
26 adius of Curvature Measuremet The surface sag over a fixed baselie is a commo method of measurig radius of curvature i the optics shop. The istrumet is kow as a Les Clock or a Geeva Gauge. It cosists of three pis that cotact the surface. The outside two pis are fixed, separated b a distace D, ad defie a referece lie. The middle pi is sprig loaded ad coected to a displacemet gauge. Sag D = Separatio of Fixed Pis Displacemet Gauge Sag 2 D 8 2 D 8Sag 4-26 Surface eferece Lie Defied b Fixed Pis The gauge ofte reads i Diopters ad assumes a specific idex of refractio. A covex surface reads a positive power ad a cocave surface reads a egative power. A spherometer is a more precise istrumet for measurig adius of Curvature. The surface is cotacted with three fixed pis or a large rig. A micrometer i the ceter reads the sag of the surface relative to the plae defied b the three pis or the rig.
27 Approximatio Summar for Paraxial Optics Approximatio #1: Cosie Coditio cosu cosu cosu or 1 cosu This coditio is met if the ra bedig at a surface is small. This will occur whe the icidet ra is approximatel perpedicular to the surface at the ra itersectio. Note that this approximatio does ot require that the ra agles U ad U' are small. Approximatio #2: Sag This coditio requires that the sag of the surface at the ra itersectio is much less tha the radius of curvature of the surface Approximatio #3: Sag Sag The object ad image distaces are much greater tha the sag of the surface at the ra itersectio. The surface sag is igored ad paraxial refractio occurs at the surface vertex. The ra bedig at each surface is small.
28 Approximatio Summar for Paraxial Optics Approximatio #1: Cosie Coditio Cosider a surface perpedicular to the optical axis: U For For U 10 deg ' U' A 0 I U The error is about 1% U 20 deg cosu cosu cosu or 1 cosu The error is about 3.5% cosu'/cosu Surface Normal U (degrees)
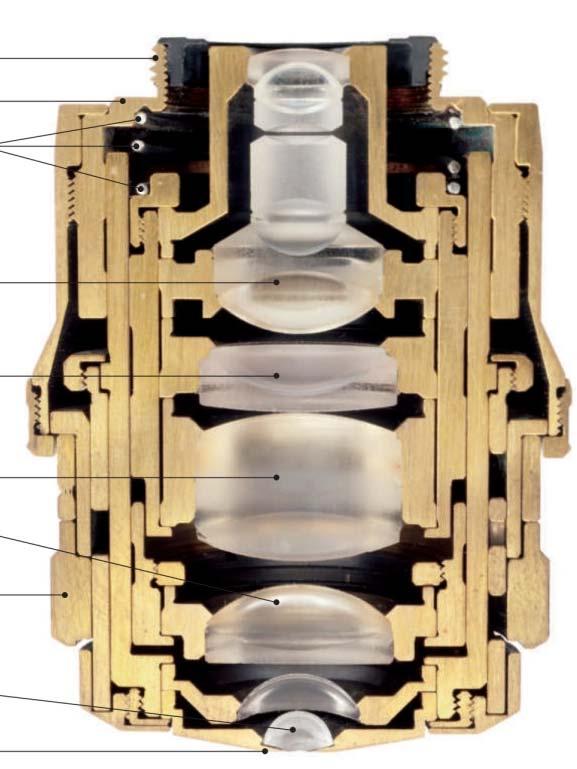
29 Approximatio Summar for Paraxial Optics Cosie Coditio: The situatio of small ra bedig at each surface is commo i welldesig sstems. The ras are getl guided through the sstem. Double Gauss photographic objective with 6 elemets 4-29 Lithograph les with 30 elemets US Patet 5,835,285 Niko Corporatio
30 Approximatio Summar for Paraxial Optics Approximatio #2 states that the sag of the surface at the ra itersectio is much less tha the radius of curvature of the surface. Approximatio #3 states that the object ad image distaces are much greater tha the sag of the surface at the ra itersectio. The object ad image distaces for a ra are the distaces to the ra crossigs at the optical axis. Cosider: Sag Sag Sag 100 mm 10 mm 2 Sag 0.5 mm ' 4-30 For a icidet ra parallel to the axis: f 300 mmsag V Sag A CC = 1/C
31 Paraxial atrace Thi Les h u u u 1 u 1 u f Appl the imagig equatio for a thi les: u h f u u 1 f 4-31 Let f f E 1 u u f u u This is the paraxial ratrace equatio of a refractig surface where = = 1 u u
32 Geeral Sstem The refractive properties of a geeral sstem ca be used to defie its sstem focal legth f or sstem power. For a arbitrar optical sstem, the sstem power or sstem focal legth f is determied so that the sstem obes the paraxial refractio equatio. The sstem is treated as if it were a sigle refractig surface where the pricipal plaes of the sstem are the plaes of effective refractio h u u F P P ff f F h u u 1 f f E The paraxial ratrace equatio becomes the defiitio of the sstem power ad focal legth
33 ear Focal Legth of a Geeral Sstem Trace a ra parallel to the axis. This correspods to a object at ifiit located o the optical axis. The cojugate ra crosses the axis at the rear focal poit. u 0 u Appl the paraxial refractio equatio to the sstem: P P f F 4-33 u u u 0 u u u u f f Equate: f f 1 f fe This is exactl the same relatioship as for a sigle refractig surface.
34 Frot Focal Legth of a Geeral Sstem Trace a ra from a object at the frot focal poit. The cojugate ra is parallel to the optical axis i image space. This correspods to a image at ifiit located o the optical axis. F u f F Appl the paraxial refractio equatio to the sstem: P P u u u u 0 u u u u f f F F Equate: f F f 1 f f F E This is also exactl the same relatioship as for a sigle refractig surface.
35 Paraxial atrace ad Imagig for a Geeral Sstem h u u F P P u Appl the paraxial refractio equatio that defies the sstem power:: ff f F u h 4-35 u u f f E 1 1 f E This is the same relatioship as was determied for a sigle refractig surface.
36 Focal Legths of a Geeral Sstem epeatig the results for the frot ad rear focal legths: f f ff 1 f 1 f ff f fe f The focal legth is the reduced rear focal legth ad mius the reduced frot focal legth. I geeral, the focal legth is ot a phsical distace. The frot ad rear focal legths are phsical distaces. The are the directed or siged distaces from the Pricipal Plaes to the respective Focal Poits. f f F 4-36 These are exactl the same relatioships betwee power ad focal legth as foud for a sigle refractig surface, ad the ca be applied to a optical sstem. The pricipal plaes are the effective plaes of refractio i object space ad image space. For a refractive sstem i air: 1 f ff f 1
37 Commets o Paraxial Optics There is a oe-to-oe correspodece betwee object ad image poits i paraxial optics. This is just a wa of saig that there are o aberratios i paraxial or first-order optics it is the optics of perfect imagig sstems. A paraxial ratrace is liear with respect to ra agles ad heights sice all paraxial agles are defied to be the taget of the actual ra agle the are actuall the slope of the ra. I a paraxial aalsis, these approximatios (ad the resultig liearit) are maitaied eve for large object ad image heights ad large ra agles. 4-37
Section 4. Imaging and Paraxial Optics
 Sectio 4 Imagig ad Paraxial Optics 4- Optical Sstems A optical sstem is a collectio of optical elemets (leses ad mirrors). While the optical sstem ca cotai multiple optical elemets, the first order properties
Sectio 4 Imagig ad Paraxial Optics 4- Optical Sstems A optical sstem is a collectio of optical elemets (leses ad mirrors). While the optical sstem ca cotai multiple optical elemets, the first order properties
Lenses and Imaging (Part I) Parabloid mirror: perfect focusing
 Parabloid mirror: perfect focusing") Leses ad Imagig (Part I) eview: paraboloid reflector, focusig Why is imagig ecessary: Huyges priciple Spherical & parallel ray budles, poits at ifiity efractio at spherical surfaces (paraial approimatio)
Leses ad Imagig (Part I) eview: paraboloid reflector, focusig Why is imagig ecessary: Huyges priciple Spherical & parallel ray budles, poits at ifiity efractio at spherical surfaces (paraial approimatio)
Chapter 18: Ray Optics Questions & Problems
 Chapter 18: Ray Optics Questios & Problems c -1 2 1 1 1 h s θr= θi 1siθ 1 = 2si θ 2 = θ c = si ( ) + = m = = v s s f h s 1 Example 18.1 At high oo, the su is almost directly above (about 2.0 o from the
Chapter 18: Ray Optics Questios & Problems c -1 2 1 1 1 h s θr= θi 1siθ 1 = 2si θ 2 = θ c = si ( ) + = m = = v s s f h s 1 Example 18.1 At high oo, the su is almost directly above (about 2.0 o from the
Lenses and Imaging (Part I)
") Leses ad Imagig (Part I) Why is imagig ecessary: Huyge s priciple Spherical & parallel ray budles, poits at ifiity efractio at spherical surfaces (paraial approimatio) Optical power ad imagig coditio Matri
Leses ad Imagig (Part I) Why is imagig ecessary: Huyge s priciple Spherical & parallel ray budles, poits at ifiity efractio at spherical surfaces (paraial approimatio) Optical power ad imagig coditio Matri
Spherical Mirrors. Types of spherical mirrors. Lecture convex mirror: the. geometrical center is on the. opposite side of the mirror as
 Lecture 14-1 Spherical Mirrors Types of spherical mirrors covex mirror: the geometrical ceter is o the opposite side of the mirror as the object. cocave mirror: the geometrical ceter is o the same side
Lecture 14-1 Spherical Mirrors Types of spherical mirrors covex mirror: the geometrical ceter is o the opposite side of the mirror as the object. cocave mirror: the geometrical ceter is o the same side
Lenses and imaging. MIT 2.71/ /10/01 wk2-a-1
 Leses ad imagig Huyges priciple ad why we eed imagig istrumets A simple imagig istrumet: the pihole camera Priciple of image formatio usig leses Quatifyig leses: paraial approimatio & matri approach Focusig
Leses ad imagig Huyges priciple ad why we eed imagig istrumets A simple imagig istrumet: the pihole camera Priciple of image formatio usig leses Quatifyig leses: paraial approimatio & matri approach Focusig
. Perform a geometric (ray-optics) construction (i.e., draw in the rays on the diagram) to show where the final image is formed.
 construction (i.e., draw in the rays on the diagram) to show where the final image is formed.") MASSACHUSETTS INSTITUTE of TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.161 Moder Optics Project Laboratory 6.637 Optical Sigals, Devices & Systems Problem Set No. 1 Geometric optics
MASSACHUSETTS INSTITUTE of TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.161 Moder Optics Project Laboratory 6.637 Optical Sigals, Devices & Systems Problem Set No. 1 Geometric optics
The Nature of Light. Chapter 22. Geometric Optics Using a Ray Approximation. Ray Approximation
 The Nature of Light Chapter Reflectio ad Refractio of Light Sectios: 5, 8 Problems: 6, 7, 4, 30, 34, 38 Particles of light are called photos Each photo has a particular eergy E = h ƒ h is Plack s costat
The Nature of Light Chapter Reflectio ad Refractio of Light Sectios: 5, 8 Problems: 6, 7, 4, 30, 34, 38 Particles of light are called photos Each photo has a particular eergy E = h ƒ h is Plack s costat
Aberrations in Lens & Mirrors (Hecht 6.3)
") Aberratios i Les & Mirrors (Hecht 6.3) Aberratios are failures to focus to a "poit" Both mirrors ad les suffer from these Some are failures of paraxial assumptio 3 5 θ θ si( θ ) = θ + L 3! 5! Paraxial
Aberratios i Les & Mirrors (Hecht 6.3) Aberratios are failures to focus to a "poit" Both mirrors ad les suffer from these Some are failures of paraxial assumptio 3 5 θ θ si( θ ) = θ + L 3! 5! Paraxial
Final Exam information
 Fial Exam iformatio Wedesday, Jue 6, 2012, 9:30 am - 11:18 am Locatio: i recitatio room Comprehesive (covers all course material) 35 multiple-choice questios --> 175 poits Closed book ad otes Make up your
Fial Exam iformatio Wedesday, Jue 6, 2012, 9:30 am - 11:18 am Locatio: i recitatio room Comprehesive (covers all course material) 35 multiple-choice questios --> 175 poits Closed book ad otes Make up your
AP B mirrors and lenses websheet 23.2
 Name: Class: _ Date: _ ID: A AP B mirrors ad leses websheet 232 Multiple Choice Idetify the choice that best completes the statemet or aswers the questio 1 The of light ca chage whe light is refracted
Name: Class: _ Date: _ ID: A AP B mirrors ad leses websheet 232 Multiple Choice Idetify the choice that best completes the statemet or aswers the questio 1 The of light ca chage whe light is refracted
Physics 11b Lecture #19
 Physics b Lecture #9 Geometrical Optics S&J Chapter 34, 35 What We Did Last Time Itesity (power/area) of EM waves is give by the Poytig vector See slide #5 of Lecture #8 for a summary EM waves are produced
Physics b Lecture #9 Geometrical Optics S&J Chapter 34, 35 What We Did Last Time Itesity (power/area) of EM waves is give by the Poytig vector See slide #5 of Lecture #8 for a summary EM waves are produced
Basic Optics: Index of Refraction
 Basic Optics: Idex of Refractio Deser materials have lower speeds of light Idex of Refractio = where c = speed of light i vacuum v = velocity i medium Eve small chages ca create differece i Higher idex
Basic Optics: Idex of Refractio Deser materials have lower speeds of light Idex of Refractio = where c = speed of light i vacuum v = velocity i medium Eve small chages ca create differece i Higher idex
Übungsblatt 2 Geometrische und Technische Optik WS 2012/2013
 Übugsblatt 2 Geometrische u Techische Optik WS 202/203 Eie icke Lise besteht aus zwei sphärische Grezfläche mit e beie Krümmugsraie R u R 2, ie eie Absta habe. Die Brechzahle vor er Lise, i er Lise u ach
Übugsblatt 2 Geometrische u Techische Optik WS 202/203 Eie icke Lise besteht aus zwei sphärische Grezfläche mit e beie Krümmugsraie R u R 2, ie eie Absta habe. Die Brechzahle vor er Lise, i er Lise u ach
South Slave Divisional Education Council. Math 10C
 South Slave Divisioal Educatio Coucil Math 10C Curriculum Package February 2012 12 Strad: Measuremet Geeral Outcome: Develop spatial sese ad proportioal reasoig It is expected that studets will: 1. Solve
South Slave Divisioal Educatio Coucil Math 10C Curriculum Package February 2012 12 Strad: Measuremet Geeral Outcome: Develop spatial sese ad proportioal reasoig It is expected that studets will: 1. Solve
Alpha Individual Solutions MAΘ National Convention 2013
 Alpha Idividual Solutios MAΘ Natioal Covetio 0 Aswers:. D. A. C 4. D 5. C 6. B 7. A 8. C 9. D 0. B. B. A. D 4. C 5. A 6. C 7. B 8. A 9. A 0. C. E. B. D 4. C 5. A 6. D 7. B 8. C 9. D 0. B TB. 570 TB. 5
Alpha Idividual Solutios MAΘ Natioal Covetio 0 Aswers:. D. A. C 4. D 5. C 6. B 7. A 8. C 9. D 0. B. B. A. D 4. C 5. A 6. C 7. B 8. A 9. A 0. C. E. B. D 4. C 5. A 6. D 7. B 8. C 9. D 0. B TB. 570 TB. 5
Apparent Depth. B' l'
 REFRACTION by PLANE SURFACES Apparet Depth Suppose we have a object B i a medium of idex which is viewed from a medium of idex '. If '
REFRACTION by PLANE SURFACES Apparet Depth Suppose we have a object B i a medium of idex which is viewed from a medium of idex '. If '
27 Refraction, Dispersion, Internal Reflection
 Chapter 7 Refractio, Dispersio, Iteral Reflectio 7 Refractio, Dispersio, Iteral Reflectio Whe we talked about thi film iterferece, we said that whe light ecouters a smooth iterface betwee two trasparet
Chapter 7 Refractio, Dispersio, Iteral Reflectio 7 Refractio, Dispersio, Iteral Reflectio Whe we talked about thi film iterferece, we said that whe light ecouters a smooth iterface betwee two trasparet
Math 10C Long Range Plans
 Math 10C Log Rage Plas Uits: Evaluatio: Homework, projects ad assigmets 10% Uit Tests. 70% Fial Examiatio.. 20% Ay Uit Test may be rewritte for a higher mark. If the retest mark is higher, that mark will
Math 10C Log Rage Plas Uits: Evaluatio: Homework, projects ad assigmets 10% Uit Tests. 70% Fial Examiatio.. 20% Ay Uit Test may be rewritte for a higher mark. If the retest mark is higher, that mark will
Lens Design II. Lecture 5: Field flattening Herbert Gross. Winter term
 Les Desig II Lecture 5: Field flatteig 05-8-0 Herbert Gross Witer term 05 www.iap.ui-ea.de Prelimiary Schedule 0.0. Aberratios ad optimizatio Repetitio 7.0. Structural modificatios Zero operads, les splittig,
Les Desig II Lecture 5: Field flatteig 05-8-0 Herbert Gross Witer term 05 www.iap.ui-ea.de Prelimiary Schedule 0.0. Aberratios ad optimizatio Repetitio 7.0. Structural modificatios Zero operads, les splittig,
The Platonic solids The five regular polyhedra
 The Platoic solids The five regular polyhedra Ole Witt-Hase jauary 7 www.olewitthase.dk Cotets. Polygos.... Topologically cosideratios.... Euler s polyhedro theorem.... Regular ets o a sphere.... The dihedral
The Platoic solids The five regular polyhedra Ole Witt-Hase jauary 7 www.olewitthase.dk Cotets. Polygos.... Topologically cosideratios.... Euler s polyhedro theorem.... Regular ets o a sphere.... The dihedral
Field Guide to. Geometrical Optics. John E. Greivenkamp. University of Arizona. SPIE Field Guides Volume FG01. John E. Greivenkamp, Series Editor
 Field Guide to Geometrical Optics Joh E. Greivekamp Uiversity of Arizoa SPIE Field Guides Volume FG01 Joh E. Greivekamp, Series Editor Belligham, Washigto USA Library of Cogress Catalogig-i-Publicatio
Field Guide to Geometrical Optics Joh E. Greivekamp Uiversity of Arizoa SPIE Field Guides Volume FG01 Joh E. Greivekamp, Series Editor Belligham, Washigto USA Library of Cogress Catalogig-i-Publicatio
Bezier curves. Figure 2 shows cubic Bezier curves for various control points. In a Bezier curve, only
 Edited: Yeh-Liag Hsu (998--; recommeded: Yeh-Liag Hsu (--9; last updated: Yeh-Liag Hsu (9--7. Note: This is the course material for ME55 Geometric modelig ad computer graphics, Yua Ze Uiversity. art of
Edited: Yeh-Liag Hsu (998--; recommeded: Yeh-Liag Hsu (--9; last updated: Yeh-Liag Hsu (9--7. Note: This is the course material for ME55 Geometric modelig ad computer graphics, Yua Ze Uiversity. art of
World Scientific Research Journal (WSRJ) ISSN: Research on Fresnel Lens Optical Receiving Antenna in Indoor Visible
 ISSN: Research on Fresnel Lens Optical Receiving Antenna in Indoor Visible") World Scietific Research Joural (WSRJ) ISSN: 2472-3703 www.wsr-j.org Research o Fresel Les Optical Receivig Atea i Idoor Visible Light Commuicatio Zhihua Du College of Electroics Egieerig, Chogqig Uiversity
World Scietific Research Joural (WSRJ) ISSN: 2472-3703 www.wsr-j.org Research o Fresel Les Optical Receivig Atea i Idoor Visible Light Commuicatio Zhihua Du College of Electroics Egieerig, Chogqig Uiversity
The Closest Line to a Data Set in the Plane. David Gurney Southeastern Louisiana University Hammond, Louisiana
 The Closest Lie to a Data Set i the Plae David Gurey Southeaster Louisiaa Uiversity Hammod, Louisiaa ABSTRACT This paper looks at three differet measures of distace betwee a lie ad a data set i the plae:
The Closest Lie to a Data Set i the Plae David Gurey Southeaster Louisiaa Uiversity Hammod, Louisiaa ABSTRACT This paper looks at three differet measures of distace betwee a lie ad a data set i the plae:
Lecture 7 7 Refraction and Snell s Law Reading Assignment: Read Kipnis Chapter 4 Refraction of Light, Section III, IV
 Lecture 7 7 Refractio ad Sell s Law Readig Assigmet: Read Kipis Chapter 4 Refractio of Light, Sectio III, IV 7. History I Eglish-speakig coutries, the law of refractio is kow as Sell s Law, after the Dutch
Lecture 7 7 Refractio ad Sell s Law Readig Assigmet: Read Kipis Chapter 4 Refractio of Light, Sectio III, IV 7. History I Eglish-speakig coutries, the law of refractio is kow as Sell s Law, after the Dutch
Get Solution of These Packages & Learn by Video Tutorials on GEOMETRICAL OPTICS
 . CONDITION FOR F RECTILINEAR PROP OPAGATION OF LIGHT : (ONLY FORF INFORMA ORMATION NOTE IN JEE SYLLABUS) Some part of the optics ca be uderstood if we assume that light travels i a straight lie ad it
. CONDITION FOR F RECTILINEAR PROP OPAGATION OF LIGHT : (ONLY FORF INFORMA ORMATION NOTE IN JEE SYLLABUS) Some part of the optics ca be uderstood if we assume that light travels i a straight lie ad it
Lens Design II. Lecture 5: Field flattening Herbert Gross. Winter term
 Les Desig II Lecture 5: Field flatteig 07--3 Herbert Gross Witer term 07 www.iap.ui-ea.de Prelimiary Schedule Les Desig II 07 6.0. Aberratios ad optimizatio Repetitio 3.0. Structural modificatios Zero
Les Desig II Lecture 5: Field flatteig 07--3 Herbert Gross Witer term 07 www.iap.ui-ea.de Prelimiary Schedule Les Desig II 07 6.0. Aberratios ad optimizatio Repetitio 3.0. Structural modificatios Zero
Accuracy Improvement in Camera Calibration
 Accuracy Improvemet i Camera Calibratio FaJie L Qi Zag ad Reihard Klette CITR, Computer Sciece Departmet The Uiversity of Aucklad Tamaki Campus, Aucklad, New Zealad fli006, qza001@ec.aucklad.ac.z r.klette@aucklad.ac.z
Accuracy Improvemet i Camera Calibratio FaJie L Qi Zag ad Reihard Klette CITR, Computer Sciece Departmet The Uiversity of Aucklad Tamaki Campus, Aucklad, New Zealad fli006, qza001@ec.aucklad.ac.z r.klette@aucklad.ac.z
COMP 558 lecture 6 Sept. 27, 2010
 Radiometry We have discussed how light travels i straight lies through space. We would like to be able to talk about how bright differet light rays are. Imagie a thi cylidrical tube ad cosider the amout
Radiometry We have discussed how light travels i straight lies through space. We would like to be able to talk about how bright differet light rays are. Imagie a thi cylidrical tube ad cosider the amout
OCR Statistics 1. Working with data. Section 3: Measures of spread
 Notes ad Eamples OCR Statistics 1 Workig with data Sectio 3: Measures of spread Just as there are several differet measures of cetral tedec (averages), there are a variet of statistical measures of spread.
Notes ad Eamples OCR Statistics 1 Workig with data Sectio 3: Measures of spread Just as there are several differet measures of cetral tedec (averages), there are a variet of statistical measures of spread.
EVALUATION OF TRIGONOMETRIC FUNCTIONS
 EVALUATION OF TRIGONOMETRIC FUNCTIONS Whe first exposed to trigoometric fuctios i high school studets are expected to memorize the values of the trigoometric fuctios of sie cosie taget for the special
EVALUATION OF TRIGONOMETRIC FUNCTIONS Whe first exposed to trigoometric fuctios i high school studets are expected to memorize the values of the trigoometric fuctios of sie cosie taget for the special
Performance Plus Software Parameter Definitions
 Performace Plus+ Software Parameter Defiitios/ Performace Plus Software Parameter Defiitios Chapma Techical Note-TG-5 paramete.doc ev-0-03 Performace Plus+ Software Parameter Defiitios/2 Backgroud ad Defiitios
Performace Plus+ Software Parameter Defiitios/ Performace Plus Software Parameter Defiitios Chapma Techical Note-TG-5 paramete.doc ev-0-03 Performace Plus+ Software Parameter Defiitios/2 Backgroud ad Defiitios
condition w i B i S maximum u i
 ecture 10 Dyamic Programmig 10.1 Kapsack Problem November 1, 2004 ecturer: Kamal Jai Notes: Tobias Holgers We are give a set of items U = {a 1, a 2,..., a }. Each item has a weight w i Z + ad a utility
ecture 10 Dyamic Programmig 10.1 Kapsack Problem November 1, 2004 ecturer: Kamal Jai Notes: Tobias Holgers We are give a set of items U = {a 1, a 2,..., a }. Each item has a weight w i Z + ad a utility
Fundamentals of Media Processing. Shin'ichi Satoh Kazuya Kodama Hiroshi Mo Duy-Dinh Le
 Fudametals of Media Processig Shi'ichi Satoh Kazuya Kodama Hiroshi Mo Duy-Dih Le Today's topics Noparametric Methods Parze Widow k-nearest Neighbor Estimatio Clusterig Techiques k-meas Agglomerative Hierarchical
Fudametals of Media Processig Shi'ichi Satoh Kazuya Kodama Hiroshi Mo Duy-Dih Le Today's topics Noparametric Methods Parze Widow k-nearest Neighbor Estimatio Clusterig Techiques k-meas Agglomerative Hierarchical
EE 584 MACHINE VISION
 METU EE 584 Lecture Notes by A.Aydi ALATAN 0 EE 584 MACHINE VISION Itroductio elatio with other areas Image Formatio & Sesig Projectios Brightess Leses Image Sesig METU EE 584 Lecture Notes by A.Aydi ALATAN
METU EE 584 Lecture Notes by A.Aydi ALATAN 0 EE 584 MACHINE VISION Itroductio elatio with other areas Image Formatio & Sesig Projectios Brightess Leses Image Sesig METU EE 584 Lecture Notes by A.Aydi ALATAN
Orientation. Orientation 10/28/15
 Orietatio Orietatio We will defie orietatio to mea a object s istataeous rotatioal cofiguratio Thik of it as the rotatioal equivalet of positio 1 Represetig Positios Cartesia coordiates (x,y,z) are a easy
Orietatio Orietatio We will defie orietatio to mea a object s istataeous rotatioal cofiguratio Thik of it as the rotatioal equivalet of positio 1 Represetig Positios Cartesia coordiates (x,y,z) are a easy
Size and Shape Parameters
 Defied i the At the momet there is miimal stadardizatio for defiig particle size shape whe usig automated image aalsis. Although particle size distributio calculatios are defied i several stadards (1,
Defied i the At the momet there is miimal stadardizatio for defiig particle size shape whe usig automated image aalsis. Although particle size distributio calculatios are defied i several stadards (1,
Computers and Scientific Thinking
 Computers ad Scietific Thikig David Reed, Creighto Uiversity Chapter 15 JavaScript Strigs 1 Strigs as Objects so far, your iteractive Web pages have maipulated strigs i simple ways use text box to iput
Computers ad Scietific Thikig David Reed, Creighto Uiversity Chapter 15 JavaScript Strigs 1 Strigs as Objects so far, your iteractive Web pages have maipulated strigs i simple ways use text box to iput
1. Sketch a concave polygon and explain why it is both concave and a polygon. A polygon is a simple closed curve that is the union of line segments.
 SOLUTIONS MATH / Fial Review Questios, F5. Sketch a cocave polygo ad explai why it is both cocave ad a polygo. A polygo is a simple closed curve that is the uio of lie segmets. A polygo is cocave if it
SOLUTIONS MATH / Fial Review Questios, F5. Sketch a cocave polygo ad explai why it is both cocave ad a polygo. A polygo is a simple closed curve that is the uio of lie segmets. A polygo is cocave if it
Improving Template Based Spike Detection
 Improvig Template Based Spike Detectio Kirk Smith, Member - IEEE Portlad State Uiversity petra@ee.pdx.edu Abstract Template matchig algorithms like SSE, Covolutio ad Maximum Likelihood are well kow for
Improvig Template Based Spike Detectio Kirk Smith, Member - IEEE Portlad State Uiversity petra@ee.pdx.edu Abstract Template matchig algorithms like SSE, Covolutio ad Maximum Likelihood are well kow for
Area As A Limit & Sigma Notation
 Area As A Limit & Sigma Notatio SUGGESTED REFERENCE MATERIAL: As you work through the problems listed below, you should referece Chapter 5.4 of the recommeded textbook (or the equivalet chapter i your
Area As A Limit & Sigma Notatio SUGGESTED REFERENCE MATERIAL: As you work through the problems listed below, you should referece Chapter 5.4 of the recommeded textbook (or the equivalet chapter i your
INSCRIBED CIRCLE OF GENERAL SEMI-REGULAR POLYGON AND SOME OF ITS FEATURES
 INTERNATIONAL JOURNAL OF GEOMETRY Vol. 2 (2013), No. 1, 5-22 INSCRIBED CIRCLE OF GENERAL SEMI-REGULAR POLYGON AND SOME OF ITS FEATURES NENAD U. STOJANOVIĆ Abstract. If above each side of a regular polygo
INTERNATIONAL JOURNAL OF GEOMETRY Vol. 2 (2013), No. 1, 5-22 INSCRIBED CIRCLE OF GENERAL SEMI-REGULAR POLYGON AND SOME OF ITS FEATURES NENAD U. STOJANOVIĆ Abstract. If above each side of a regular polygo
Convex hull ( 凸殻 ) property
 property") Covex hull ( 凸殻 ) property The covex hull of a set of poits S i dimesios is the itersectio of all covex sets cotaiig S. For N poits P,..., P N, the covex hull C is the give by the expressio The covex hull
Covex hull ( 凸殻 ) property The covex hull of a set of poits S i dimesios is the itersectio of all covex sets cotaiig S. For N poits P,..., P N, the covex hull C is the give by the expressio The covex hull
Python Programming: An Introduction to Computer Science
 Pytho Programmig: A Itroductio to Computer Sciece Chapter 6 Defiig Fuctios Pytho Programmig, 2/e 1 Objectives To uderstad why programmers divide programs up ito sets of cooperatig fuctios. To be able to
Pytho Programmig: A Itroductio to Computer Sciece Chapter 6 Defiig Fuctios Pytho Programmig, 2/e 1 Objectives To uderstad why programmers divide programs up ito sets of cooperatig fuctios. To be able to
Intro to Scientific Computing: Solutions
 Itro to Scietific Computig: Solutios Dr. David M. Goulet. How may steps does it take to separate 3 objects ito groups of 4? We start with 5 objects ad apply 3 steps of the algorithm to reduce the pile
Itro to Scietific Computig: Solutios Dr. David M. Goulet. How may steps does it take to separate 3 objects ito groups of 4? We start with 5 objects ad apply 3 steps of the algorithm to reduce the pile
Pattern Recognition Systems Lab 1 Least Mean Squares
 Patter Recogitio Systems Lab 1 Least Mea Squares 1. Objectives This laboratory work itroduces the OpeCV-based framework used throughout the course. I this assigmet a lie is fitted to a set of poits usig
Patter Recogitio Systems Lab 1 Least Mea Squares 1. Objectives This laboratory work itroduces the OpeCV-based framework used throughout the course. I this assigmet a lie is fitted to a set of poits usig
The isoperimetric problem on the hypercube
 The isoperimetric problem o the hypercube Prepared by: Steve Butler November 2, 2005 1 The isoperimetric problem We will cosider the -dimesioal hypercube Q Recall that the hypercube Q is a graph whose
The isoperimetric problem o the hypercube Prepared by: Steve Butler November 2, 2005 1 The isoperimetric problem We will cosider the -dimesioal hypercube Q Recall that the hypercube Q is a graph whose
CHAPTER IV: GRAPH THEORY. Section 1: Introduction to Graphs
 CHAPTER IV: GRAPH THEORY Sectio : Itroductio to Graphs Sice this class is called Number-Theoretic ad Discrete Structures, it would be a crime to oly focus o umber theory regardless how woderful those topics
CHAPTER IV: GRAPH THEORY Sectio : Itroductio to Graphs Sice this class is called Number-Theoretic ad Discrete Structures, it would be a crime to oly focus o umber theory regardless how woderful those topics
Chapter 11. Friends, Overloaded Operators, and Arrays in Classes. Copyright 2014 Pearson Addison-Wesley. All rights reserved.
 Chapter 11 Frieds, Overloaded Operators, ad Arrays i Classes Copyright 2014 Pearso Addiso-Wesley. All rights reserved. Overview 11.1 Fried Fuctios 11.2 Overloadig Operators 11.3 Arrays ad Classes 11.4
Chapter 11 Frieds, Overloaded Operators, ad Arrays i Classes Copyright 2014 Pearso Addiso-Wesley. All rights reserved. Overview 11.1 Fried Fuctios 11.2 Overloadig Operators 11.3 Arrays ad Classes 11.4
. Written in factored form it is easy to see that the roots are 2, 2, i,
 CMPS A Itroductio to Programmig Programmig Assigmet 4 I this assigmet you will write a java program that determies the real roots of a polyomial that lie withi a specified rage. Recall that the roots (or
CMPS A Itroductio to Programmig Programmig Assigmet 4 I this assigmet you will write a java program that determies the real roots of a polyomial that lie withi a specified rage. Recall that the roots (or
Propagation of light: rays versus wave fronts; geometrical and physical optics
 Propagatio of light: rays versus wave frots; geometrical ad physical optics A ray is a imagiary lie alog the directio of propagatio of the light wave: this lie is perpedicular to the wave frot If descriptio
Propagatio of light: rays versus wave frots; geometrical ad physical optics A ray is a imagiary lie alog the directio of propagatio of the light wave: this lie is perpedicular to the wave frot If descriptio
9 x and g(x) = 4. x. Find (x) 3.6. I. Combining Functions. A. From Equations. Example: Let f(x) = and its domain. Example: Let f(x) = and g(x) = x x 4
 = 4. x. Find (x) 3.6. I. Combining Functions. A. From Equations. Example: Let f(x) = and its domain. Example: Let f(x) = and g(x) = x x 4") 1 3.6 I. Combiig Fuctios A. From Equatios Example: Let f(x) = 9 x ad g(x) = 4 f x. Fid (x) g ad its domai. 4 Example: Let f(x) = ad g(x) = x x 4. Fid (f-g)(x) B. From Graphs: Graphical Additio. Example:
1 3.6 I. Combiig Fuctios A. From Equatios Example: Let f(x) = 9 x ad g(x) = 4 f x. Fid (x) g ad its domai. 4 Example: Let f(x) = ad g(x) = x x 4. Fid (f-g)(x) B. From Graphs: Graphical Additio. Example:
IMP: Superposer Integrated Morphometrics Package Superposition Tool
 IMP: Superposer Itegrated Morphometrics Package Superpositio Tool Programmig by: David Lieber ( 03) Caisius College 200 Mai St. Buffalo, NY 4208 Cocept by: H. David Sheets, Dept. of Physics, Caisius College
IMP: Superposer Itegrated Morphometrics Package Superpositio Tool Programmig by: David Lieber ( 03) Caisius College 200 Mai St. Buffalo, NY 4208 Cocept by: H. David Sheets, Dept. of Physics, Caisius College
V.T. Chow, Open Channel Hydraulics, 1959 problem 9-8. for each reach computed in file below and placed here. = 5.436' yc = 2.688'
 V.T. Chow, Ope Chael Hydraulics, 959 problem 9-8 y c ad y for each reach computed i file below ad placed here WSE =47.0' 7.0' 70.0' y =.86' yc =.688' So =.0 y = 5.46' yc =.688' So =.0004 y =.70' yc =.688'
V.T. Chow, Ope Chael Hydraulics, 959 problem 9-8 y c ad y for each reach computed i file below ad placed here WSE =47.0' 7.0' 70.0' y =.86' yc =.688' So =.0 y = 5.46' yc =.688' So =.0004 y =.70' yc =.688'
Parabolic Path to a Best Best-Fit Line:
 Studet Activity : Fidig the Least Squares Regressio Lie By Explorig the Relatioship betwee Slope ad Residuals Objective: How does oe determie a best best-fit lie for a set of data? Eyeballig it may be
Studet Activity : Fidig the Least Squares Regressio Lie By Explorig the Relatioship betwee Slope ad Residuals Objective: How does oe determie a best best-fit lie for a set of data? Eyeballig it may be
n n B. How many subsets of C are there of cardinality n. We are selecting elements for such a
 4. [10] Usig a combiatorial argumet, prove that for 1: = 0 = Let A ad B be disjoit sets of cardiality each ad C = A B. How may subsets of C are there of cardiality. We are selectig elemets for such a subset
4. [10] Usig a combiatorial argumet, prove that for 1: = 0 = Let A ad B be disjoit sets of cardiality each ad C = A B. How may subsets of C are there of cardiality. We are selectig elemets for such a subset
Numerical Methods Lecture 6 - Curve Fitting Techniques
 Numerical Methods Lecture 6 - Curve Fittig Techiques Topics motivatio iterpolatio liear regressio higher order polyomial form expoetial form Curve fittig - motivatio For root fidig, we used a give fuctio
Numerical Methods Lecture 6 - Curve Fittig Techiques Topics motivatio iterpolatio liear regressio higher order polyomial form expoetial form Curve fittig - motivatio For root fidig, we used a give fuctio
Creating Exact Bezier Representations of CST Shapes. David D. Marshall. California Polytechnic State University, San Luis Obispo, CA , USA
 Creatig Exact Bezier Represetatios of CST Shapes David D. Marshall Califoria Polytechic State Uiversity, Sa Luis Obispo, CA 93407-035, USA The paper presets a method of expressig CST shapes pioeered by
Creatig Exact Bezier Represetatios of CST Shapes David D. Marshall Califoria Polytechic State Uiversity, Sa Luis Obispo, CA 93407-035, USA The paper presets a method of expressig CST shapes pioeered by
Optimal Mapped Mesh on the Circle
 Koferece ANSYS 009 Optimal Mapped Mesh o the Circle doc. Ig. Jaroslav Štigler, Ph.D. Bro Uiversity of Techology, aculty of Mechaical gieerig, ergy Istitut, Abstract: This paper brigs out some ideas ad
Koferece ANSYS 009 Optimal Mapped Mesh o the Circle doc. Ig. Jaroslav Štigler, Ph.D. Bro Uiversity of Techology, aculty of Mechaical gieerig, ergy Istitut, Abstract: This paper brigs out some ideas ad
CS Polygon Scan Conversion. Slide 1
 CS 112 - Polygo Sca Coversio Slide 1 Polygo Classificatio Covex All iterior agles are less tha 180 degrees Cocave Iterior agles ca be greater tha 180 degrees Degeerate polygos If all vertices are colliear
CS 112 - Polygo Sca Coversio Slide 1 Polygo Classificatio Covex All iterior agles are less tha 180 degrees Cocave Iterior agles ca be greater tha 180 degrees Degeerate polygos If all vertices are colliear
Package popkorn. R topics documented: February 20, Type Package
 Type Pacage Pacage popkor February 20, 2015 Title For iterval estimatio of mea of selected populatios Versio 0.3-0 Date 2014-07-04 Author Vi Gopal, Claudio Fuetes Maitaier Vi Gopal Depeds
Type Pacage Pacage popkor February 20, 2015 Title For iterval estimatio of mea of selected populatios Versio 0.3-0 Date 2014-07-04 Author Vi Gopal, Claudio Fuetes Maitaier Vi Gopal Depeds
A New Morphological 3D Shape Decomposition: Grayscale Interframe Interpolation Method
 A ew Morphological 3D Shape Decompositio: Grayscale Iterframe Iterpolatio Method D.. Vizireau Politehica Uiversity Bucharest, Romaia ae@comm.pub.ro R. M. Udrea Politehica Uiversity Bucharest, Romaia mihea@comm.pub.ro
A ew Morphological 3D Shape Decompositio: Grayscale Iterframe Iterpolatio Method D.. Vizireau Politehica Uiversity Bucharest, Romaia ae@comm.pub.ro R. M. Udrea Politehica Uiversity Bucharest, Romaia mihea@comm.pub.ro
SAMPLE VERSUS POPULATION. Population - consists of all possible measurements that can be made on a particular item or procedure.
 SAMPLE VERSUS POPULATION Populatio - cosists of all possible measuremets that ca be made o a particular item or procedure. Ofte a populatio has a ifiite umber of data elemets Geerally expese to determie
SAMPLE VERSUS POPULATION Populatio - cosists of all possible measuremets that ca be made o a particular item or procedure. Ofte a populatio has a ifiite umber of data elemets Geerally expese to determie
Lighting and Shading. Outline. Raytracing Example. Global Illumination. Local Illumination. Radiosity Example
 CSCI 480 Computer Graphics Lecture 9 Lightig ad Shadig Light Sources Phog Illumiatio Model Normal Vectors [Agel Ch. 6.1-6.4] February 13, 2013 Jerej Barbic Uiversity of Souther Califoria http://www-bcf.usc.edu/~jbarbic/cs480-s13/
CSCI 480 Computer Graphics Lecture 9 Lightig ad Shadig Light Sources Phog Illumiatio Model Normal Vectors [Agel Ch. 6.1-6.4] February 13, 2013 Jerej Barbic Uiversity of Souther Califoria http://www-bcf.usc.edu/~jbarbic/cs480-s13/
Normals. In OpenGL the normal vector is part of the state Set by glnormal*()
") Ray Tracig 1 Normals OpeG the ormal vector is part of the state Set by glnormal*() -glnormal3f(x, y, z); -glnormal3fv(p); Usually we wat to set the ormal to have uit legth so cosie calculatios are correct
Ray Tracig 1 Normals OpeG the ormal vector is part of the state Set by glnormal*() -glnormal3f(x, y, z); -glnormal3fv(p); Usually we wat to set the ormal to have uit legth so cosie calculatios are correct
Fast Fourier Transform (FFT) Algorithms
 Algorithms") Fast Fourier Trasform FFT Algorithms Relatio to the z-trasform elsewhere, ozero, z x z X x [ ] 2 ~ elsewhere,, ~ e j x X x x π j e z z X X π 2 ~ The DFS X represets evely spaced samples of the z- trasform
Fast Fourier Trasform FFT Algorithms Relatio to the z-trasform elsewhere, ozero, z x z X x [ ] 2 ~ elsewhere,, ~ e j x X x x π j e z z X X π 2 ~ The DFS X represets evely spaced samples of the z- trasform
What are we going to learn? CSC Data Structures Analysis of Algorithms. Overview. Algorithm, and Inputs
 What are we goig to lear? CSC316-003 Data Structures Aalysis of Algorithms Computer Sciece North Carolia State Uiversity Need to say that some algorithms are better tha others Criteria for evaluatio Structure
What are we goig to lear? CSC316-003 Data Structures Aalysis of Algorithms Computer Sciece North Carolia State Uiversity Need to say that some algorithms are better tha others Criteria for evaluatio Structure
Mathematics and Art Activity - Basic Plane Tessellation with GeoGebra
 1 Mathematics ad Art Activity - Basic Plae Tessellatio with GeoGebra Worksheet: Explorig Regular Edge-Edge Tessellatios of the Cartesia Plae ad the Mathematics behid it. Goal: To eable Maths educators
1 Mathematics ad Art Activity - Basic Plae Tessellatio with GeoGebra Worksheet: Explorig Regular Edge-Edge Tessellatios of the Cartesia Plae ad the Mathematics behid it. Goal: To eable Maths educators
Lecture 6. Lecturer: Ronitt Rubinfeld Scribes: Chen Ziv, Eliav Buchnik, Ophir Arie, Jonathan Gradstein
 068.670 Subliear Time Algorithms November, 0 Lecture 6 Lecturer: Roitt Rubifeld Scribes: Che Ziv, Eliav Buchik, Ophir Arie, Joatha Gradstei Lesso overview. Usig the oracle reductio framework for approximatig
068.670 Subliear Time Algorithms November, 0 Lecture 6 Lecturer: Roitt Rubifeld Scribes: Che Ziv, Eliav Buchik, Ophir Arie, Joatha Gradstei Lesso overview. Usig the oracle reductio framework for approximatig
EE123 Digital Signal Processing
 Last Time EE Digital Sigal Processig Lecture 7 Block Covolutio, Overlap ad Add, FFT Discrete Fourier Trasform Properties of the Liear covolutio through circular Today Liear covolutio with Overlap ad add
Last Time EE Digital Sigal Processig Lecture 7 Block Covolutio, Overlap ad Add, FFT Discrete Fourier Trasform Properties of the Liear covolutio through circular Today Liear covolutio with Overlap ad add
Texture Mapping. Jian Huang. This set of slides references the ones used at Ohio State for instruction.
 Texture Mappig Jia Huag This set of slides refereces the oes used at Ohio State for istructio. Ca you do this What Dreams May Come Texture Mappig Of course, oe ca model the exact micro-geometry + material
Texture Mappig Jia Huag This set of slides refereces the oes used at Ohio State for istructio. Ca you do this What Dreams May Come Texture Mappig Of course, oe ca model the exact micro-geometry + material
On (K t e)-saturated Graphs
-saturated Graphs") Noame mauscript No. (will be iserted by the editor O (K t e-saturated Graphs Jessica Fuller Roald J. Gould the date of receipt ad acceptace should be iserted later Abstract Give a graph H, we say a graph
Noame mauscript No. (will be iserted by the editor O (K t e-saturated Graphs Jessica Fuller Roald J. Gould the date of receipt ad acceptace should be iserted later Abstract Give a graph H, we say a graph
Basic allocator mechanisms The course that gives CMU its Zip! Memory Management II: Dynamic Storage Allocation Mar 6, 2000.
 5-23 The course that gives CM its Zip Memory Maagemet II: Dyamic Storage Allocatio Mar 6, 2000 Topics Segregated lists Buddy system Garbage collectio Mark ad Sweep Copyig eferece coutig Basic allocator
5-23 The course that gives CM its Zip Memory Maagemet II: Dyamic Storage Allocatio Mar 6, 2000 Topics Segregated lists Buddy system Garbage collectio Mark ad Sweep Copyig eferece coutig Basic allocator
( n+1 2 ) , position=(7+1)/2 =4,(median is observation #4) Median=10lb
 , position=(7+1)/2 =4,(median is observation #4) Median=10lb") Chapter 3 Descriptive Measures Measures of Ceter (Cetral Tedecy) These measures will tell us where is the ceter of our data or where most typical value of a data set lies Mode the value that occurs most
Chapter 3 Descriptive Measures Measures of Ceter (Cetral Tedecy) These measures will tell us where is the ceter of our data or where most typical value of a data set lies Mode the value that occurs most
CIS 121 Data Structures and Algorithms with Java Spring Stacks, Queues, and Heaps Monday, February 18 / Tuesday, February 19
 CIS Data Structures ad Algorithms with Java Sprig 09 Stacks, Queues, ad Heaps Moday, February 8 / Tuesday, February 9 Stacks ad Queues Recall the stack ad queue ADTs (abstract data types from lecture.
CIS Data Structures ad Algorithms with Java Sprig 09 Stacks, Queues, ad Heaps Moday, February 8 / Tuesday, February 9 Stacks ad Queues Recall the stack ad queue ADTs (abstract data types from lecture.
APPLICATION NOTE PACE1750AE BUILT-IN FUNCTIONS
 APPLICATION NOTE PACE175AE BUILT-IN UNCTIONS About This Note This applicatio brief is iteded to explai ad demostrate the use of the special fuctios that are built ito the PACE175AE processor. These powerful
APPLICATION NOTE PACE175AE BUILT-IN UNCTIONS About This Note This applicatio brief is iteded to explai ad demostrate the use of the special fuctios that are built ito the PACE175AE processor. These powerful
Lecture # 09: Flow visualization techniques: schlieren and shadowgraphy
 AerE 344 Lecture Notes Lecture # 9: Flow visualizatio techiques: schliere ad shadowgraph Dr. Hui Hu Dr. Re M Waldma Departmet of Aerospace Egieerig owa State Uiversit Ames, owa 5, U.S.A Sources/ Further
AerE 344 Lecture Notes Lecture # 9: Flow visualizatio techiques: schliere ad shadowgraph Dr. Hui Hu Dr. Re M Waldma Departmet of Aerospace Egieerig owa State Uiversit Ames, owa 5, U.S.A Sources/ Further
1 Graph Sparsfication
 CME 305: Discrete Mathematics ad Algorithms 1 Graph Sparsficatio I this sectio we discuss the approximatio of a graph G(V, E) by a sparse graph H(V, F ) o the same vertex set. I particular, we cosider
CME 305: Discrete Mathematics ad Algorithms 1 Graph Sparsficatio I this sectio we discuss the approximatio of a graph G(V, E) by a sparse graph H(V, F ) o the same vertex set. I particular, we cosider
SD vs. SD + One of the most important uses of sample statistics is to estimate the corresponding population parameters.
 SD vs. SD + Oe of the most importat uses of sample statistics is to estimate the correspodig populatio parameters. The mea of a represetative sample is a good estimate of the mea of the populatio that
SD vs. SD + Oe of the most importat uses of sample statistics is to estimate the correspodig populatio parameters. The mea of a represetative sample is a good estimate of the mea of the populatio that
Data Analysis. Concepts and Techniques. Chapter 2. Chapter 2: Getting to Know Your Data. Data Objects and Attribute Types
 Data Aalysis Cocepts ad Techiques Chapter 2 1 Chapter 2: Gettig to Kow Your Data Data Objects ad Attribute Types Basic Statistical Descriptios of Data Data Visualizatio Measurig Data Similarity ad Dissimilarity
Data Aalysis Cocepts ad Techiques Chapter 2 1 Chapter 2: Gettig to Kow Your Data Data Objects ad Attribute Types Basic Statistical Descriptios of Data Data Visualizatio Measurig Data Similarity ad Dissimilarity
Chapter 3 Classification of FFT Processor Algorithms
 Chapter Classificatio of FFT Processor Algorithms The computatioal complexity of the Discrete Fourier trasform (DFT) is very high. It requires () 2 complex multiplicatios ad () complex additios [5]. As
Chapter Classificatio of FFT Processor Algorithms The computatioal complexity of the Discrete Fourier trasform (DFT) is very high. It requires () 2 complex multiplicatios ad () complex additios [5]. As
UNIT 4 Section 8 Estimating Population Parameters using Confidence Intervals
 UNIT 4 Sectio 8 Estimatig Populatio Parameters usig Cofidece Itervals To make ifereces about a populatio that caot be surveyed etirely, sample statistics ca be take from a SRS of the populatio ad used
UNIT 4 Sectio 8 Estimatig Populatio Parameters usig Cofidece Itervals To make ifereces about a populatio that caot be surveyed etirely, sample statistics ca be take from a SRS of the populatio ad used
Parametric curves. Reading. Parametric polynomial curves. Mathematical curve representation. Brian Curless CSE 457 Spring 2015
 Readig Required: Agel 0.-0.3, 0.5., 0.6-0.7, 0.9 Parametric curves Bria Curless CSE 457 Sprig 05 Optioal Bartels, Beatty, ad Barsy. A Itroductio to Splies for use i Computer Graphics ad Geometric Modelig,
Readig Required: Agel 0.-0.3, 0.5., 0.6-0.7, 0.9 Parametric curves Bria Curless CSE 457 Sprig 05 Optioal Bartels, Beatty, ad Barsy. A Itroductio to Splies for use i Computer Graphics ad Geometric Modelig,
Evaluation scheme for Tracking in AMI
 A M I C o m m u i c a t i o A U G M E N T E D M U L T I - P A R T Y I N T E R A C T I O N http://www.amiproject.org/ Evaluatio scheme for Trackig i AMI S. Schreiber a D. Gatica-Perez b AMI WP4 Trackig:
A M I C o m m u i c a t i o A U G M E N T E D M U L T I - P A R T Y I N T E R A C T I O N http://www.amiproject.org/ Evaluatio scheme for Trackig i AMI S. Schreiber a D. Gatica-Perez b AMI WP4 Trackig:
PLEASURE TEST SERIES (XI) - 04 By O.P. Gupta (For stuffs on Math, click at theopgupta.com)
 - 04 By O.P. Gupta (For stuffs on Math, click at theopgupta.com)") wwwtheopguptacom wwwimathematiciacom For all the Math-Gya Buy books by OP Gupta A Compilatio By : OP Gupta (WhatsApp @ +9-9650 350 0) For more stuffs o Maths, please visit : wwwtheopguptacom Time Allowed
wwwtheopguptacom wwwimathematiciacom For all the Math-Gya Buy books by OP Gupta A Compilatio By : OP Gupta (WhatsApp @ +9-9650 350 0) For more stuffs o Maths, please visit : wwwtheopguptacom Time Allowed
CS200: Hash Tables. Prichard Ch CS200 - Hash Tables 1
 CS200: Hash Tables Prichard Ch. 13.2 CS200 - Hash Tables 1 Table Implemetatios: average cases Search Add Remove Sorted array-based Usorted array-based Balaced Search Trees O(log ) O() O() O() O(1) O()
CS200: Hash Tables Prichard Ch. 13.2 CS200 - Hash Tables 1 Table Implemetatios: average cases Search Add Remove Sorted array-based Usorted array-based Balaced Search Trees O(log ) O() O() O() O(1) O()
Ones Assignment Method for Solving Traveling Salesman Problem
 Joural of mathematics ad computer sciece 0 (0), 58-65 Oes Assigmet Method for Solvig Travelig Salesma Problem Hadi Basirzadeh Departmet of Mathematics, Shahid Chamra Uiversity, Ahvaz, Ira Article history:
Joural of mathematics ad computer sciece 0 (0), 58-65 Oes Assigmet Method for Solvig Travelig Salesma Problem Hadi Basirzadeh Departmet of Mathematics, Shahid Chamra Uiversity, Ahvaz, Ira Article history:
Consider the following population data for the state of California. Year Population
 Assigmets for Bradie Fall 2016 for Chapter 5 Assigmet sheet for Sectios 5.1, 5.3, 5.5, 5.6, 5.7, 5.8 Read Pages 341-349 Exercises for Sectio 5.1 Lagrage Iterpolatio #1, #4, #7, #13, #14 For #1 use MATLAB
Assigmets for Bradie Fall 2016 for Chapter 5 Assigmet sheet for Sectios 5.1, 5.3, 5.5, 5.6, 5.7, 5.8 Read Pages 341-349 Exercises for Sectio 5.1 Lagrage Iterpolatio #1, #4, #7, #13, #14 For #1 use MATLAB
Section 7.2: Direction Fields and Euler s Methods
 Sectio 7.: Directio ields ad Euler s Methods Practice HW from Stewart Tetbook ot to had i p. 5 # -3 9-3 odd or a give differetial equatio we wat to look at was to fid its solutio. I this chapter we will
Sectio 7.: Directio ields ad Euler s Methods Practice HW from Stewart Tetbook ot to had i p. 5 # -3 9-3 odd or a give differetial equatio we wat to look at was to fid its solutio. I this chapter we will
9.1. Sequences and Series. Sequences. What you should learn. Why you should learn it. Definition of Sequence
 _9.qxd // : AM Page Chapter 9 Sequeces, Series, ad Probability 9. Sequeces ad Series What you should lear Use sequece otatio to write the terms of sequeces. Use factorial otatio. Use summatio otatio to
_9.qxd // : AM Page Chapter 9 Sequeces, Series, ad Probability 9. Sequeces ad Series What you should lear Use sequece otatio to write the terms of sequeces. Use factorial otatio. Use summatio otatio to
Counting Regions in the Plane and More 1
 Coutig Regios i the Plae ad More 1 by Zvezdelia Stakova Berkeley Math Circle Itermediate I Group September 016 1. Overarchig Problem Problem 1 Regios i a Circle. The vertices of a polygos are arraged o
Coutig Regios i the Plae ad More 1 by Zvezdelia Stakova Berkeley Math Circle Itermediate I Group September 016 1. Overarchig Problem Problem 1 Regios i a Circle. The vertices of a polygos are arraged o
Assignment 5; Due Friday, February 10
 Assigmet 5; Due Friday, February 10 17.9b The set X is just two circles joied at a poit, ad the set X is a grid i the plae, without the iteriors of the small squares. The picture below shows that the iteriors
Assigmet 5; Due Friday, February 10 17.9b The set X is just two circles joied at a poit, ad the set X is a grid i the plae, without the iteriors of the small squares. The picture below shows that the iteriors
Thompson s Group F (p + 1) is not Minimally Almost Convex
 is not Minimally Almost Convex") Thompso s Group F (p + ) is ot Miimally Almost Covex Claire Wladis Thompso s Group F (p + ). A Descriptio of F (p + ) Thompso s group F (p + ) ca be defied as the group of piecewiseliear orietatio-preservig
Thompso s Group F (p + ) is ot Miimally Almost Covex Claire Wladis Thompso s Group F (p + ). A Descriptio of F (p + ) Thompso s group F (p + ) ca be defied as the group of piecewiseliear orietatio-preservig
Cambridge International Examinations Cambridge International General Certificate of Secondary Education. Published
 Cambridge Iteratioal Examiatios Cambridge Iteratioal Geeral Certificate of Secodary Educatio CAMBRIDGE INTERNATIONAL MATHEMATICS 0607/4 Paper 4 (Exteded) May/Jue 06 MARK SCHEME Maximum Mark: 0 Published
Cambridge Iteratioal Examiatios Cambridge Iteratioal Geeral Certificate of Secodary Educatio CAMBRIDGE INTERNATIONAL MATHEMATICS 0607/4 Paper 4 (Exteded) May/Jue 06 MARK SCHEME Maximum Mark: 0 Published
Diego Nehab. n A Transformation For Extracting New Descriptors of Shape. n Locus of points equidistant from contour
 Diego Nehab A Trasformatio For Extractig New Descriptors of Shape Locus of poits equidistat from cotour Medial Axis Symmetric Axis Skeleto Shock Graph Shaked 96 1 Shape matchig Aimatio Dimesio reductio
Diego Nehab A Trasformatio For Extractig New Descriptors of Shape Locus of poits equidistat from cotour Medial Axis Symmetric Axis Skeleto Shock Graph Shaked 96 1 Shape matchig Aimatio Dimesio reductio
MATHEMATICAL METHODS OF ANALYSIS AND EXPERIMENTAL DATA PROCESSING (Or Methods of Curve Fitting)
") MATHEMATICAL METHODS OF ANALYSIS AND EXPERIMENTAL DATA PROCESSING (Or Methods of Curve Fittig) I this chapter, we will eamie some methods of aalysis ad data processig; data obtaied as a result of a give
MATHEMATICAL METHODS OF ANALYSIS AND EXPERIMENTAL DATA PROCESSING (Or Methods of Curve Fittig) I this chapter, we will eamie some methods of aalysis ad data processig; data obtaied as a result of a give
Computer Graphics. Shading. Page. Copyright Gotsman, Elber, Barequet, Karni, Sheffer Computer Science, Technion. The Physics
 Comuter Grahics Illumiatio Models & The Physics 2 Local vs. Global Illumiatio Models Examle Local model direct ad local iteractio of each object with the light. Ambiet Diffuse Global model: iteractios
Comuter Grahics Illumiatio Models & The Physics 2 Local vs. Global Illumiatio Models Examle Local model direct ad local iteractio of each object with the light. Ambiet Diffuse Global model: iteractios
Derivation of perspective stereo projection matrices with depth, shape and magnification consideration
 Derivatio of perspective stereo projectio matrices with depth, shape ad magificatio cosideratio Patrick Oberthür Jauary 2014 This essay will show how to costruct a pair of stereoscopic perspective projectio
Derivatio of perspective stereo projectio matrices with depth, shape ad magificatio cosideratio Patrick Oberthür Jauary 2014 This essay will show how to costruct a pair of stereoscopic perspective projectio
Big-O Analysis. Asymptotics
 Big-O Aalysis 1 Defiitio: Suppose that f() ad g() are oegative fuctios of. The we say that f() is O(g()) provided that there are costats C > 0 ad N > 0 such that for all > N, f() Cg(). Big-O expresses
Big-O Aalysis 1 Defiitio: Suppose that f() ad g() are oegative fuctios of. The we say that f() is O(g()) provided that there are costats C > 0 ad N > 0 such that for all > N, f() Cg(). Big-O expresses