Analysis of Binary Images
|
|
|
- Teresa Hines
- 5 years ago
- Views:
Transcription
1 Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07
2 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the retina other nearby colors (space) adaptation to previous views (time) state of mind CSE52, Spr 07

3 Color Reflectance Measured color spectrum is a function of the spectrum of the illumination and reflectance From Foundations of Vision, Brian Wandell, 995, via B. Freeman slides CSE52, Spr 07

4 CSE52, Spr 07 slide Intro from Computer T. Darrel Vision
5 Color matching functions Choose primaries, say P (λ), P 2 (λ), P 3 (λ) For monochromatic (single wavelength) energy function, what amounts of primaries will match it? i.e., For each wavelength λ, determine how much of A, of B, and of C is needed to match light of that wavelength alone. RGB a( ) λ b( λ ) c( λ ) These are color matching functions CSE52, Spr 07 primaries are monochromatic at 645.2nm, 526.3nm, 444.4nm
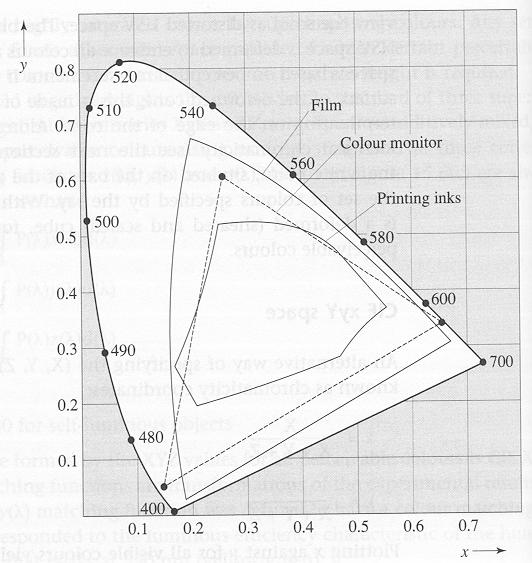

6 CIE xyy (Chromaticity Space) CSE52, Spr 07

7 Blob Tracking for Robot Control CSE52, Spr 07
8 Basic Steps. Labeling pixels as foreground/background (0,). 2. Morphological operators (sometimes) 3. Find pixels corresponding to a region 4. Compute properties of each region CSE52, Spr 07
9 Histogram-based Segmentation Ex: bright object on dark background: Histogram Number of pixels Select threshold Create binary image: I(x,y) < T O(x,y) = 0 I(x,y) T O(x,y) = Gray value T CSE52, Spr 07 [ From Octavia Camps]
10 How do we select a Threshold? Manually determine threshold experimentally. Good when lighting is stable and high contrast. Automatic thresholding P-tile method Mode method Peakiness detection Iterative algorithm CSE52, Spr 07
11 P-Tile Method If the size of the object is approx. known, pick T s.t. the area under the histogram corresponds to the size of the object: T CSE52, Spr 07 [ From Octavia Camps]
12 Mode Method Model intensity in each region R i as constant + N(0,σ i ): CSE52, Spr 07 [ From Octavia Camps]
13 Example: Image with 3 regions Ideal histogram: μ μ 2 μ 3 Add noise: The valleys are good places for thresholding to separate regions. μ μ 2 μ 3 CSE52, Spr 07 [ From Octavia Camps]
14 Finding the peaks and valleys It is a not trivial problem: CSE52, Spr 07 [ From Octavia Camps]
15 Peakiness Detection Algorithm Find the two HIGHEST LOCAL MAXIMA at a MINIMUM DISTANCE APART: g i and g j Find lowest point between them: g k Measure peakiness : min(h(g i ),H(g j ))/H(g k ) Find (g i,g j,g k ) with highest peakiness g i g k g j CSE52, Spr 07 [ From Octavia Camps]
16 Regions CSE52, Spr 07
17 What is a region? Maximal connected set of points in the image with same brightness value (e.g., ) Two points are connected if there exists a continuous path joining them. Regions can be simply connected (For every pair of points in the region, all smooth paths can be smoothly and continuously deformed into each other). Otherwise, region is multiply connected (holes) CSE52, Spr 07
18 CSE52, Spr 07 Connected Regions What are the connected regions in this binary image? Which regions are contained within which region?
19 Connected Regions What the connected regions in this binary image? Which regions are contained within which region? CSE52, Spr 07
20 Four & Eight Connectedness Four Connected Eight Connected CSE52, Spr 07
21 Jordan Curve Theorem Every closed curve in R 2 divides the plane into two region, the outside and inside of the curve. Almost obvious CSE52, Spr 07
22 Problem of 4/8 Connectedness 8 Connected: s form a closed curve, but background only forms one region. 4 Connected Background has two regions, but ones form four open curves (no closed curve) CSE52, Spr 07
23 To achieve consistency w.r.t. Jordan. Treat background as 4-connected and foreground as 8- connected. 2. Use 6-connectedness Curve Theorem CSE52, Spr 07
24 Recursive Labeling Connected Component Exploration 2 CSE52, Spr 07
25 Recursive Labeling Connected Component Exploration Procedure Label (Pixel) BEGIN Mark(Pixel) <- Marker; FOR neighbor in Neighbors(Pixel) DO IF Image (neighbor) = AND Mark(neighbor)=nil THEN Label(neighbor) END BEGIN Main Marker <- 0; FOR Pixel in Image DO IF Image(Pixel) = AND Mark(Pixel)=nil THEN END BEGIN Marker <- Marker + ; Label(Pixel); END; Globals: Marker: integer Mark: Matrix same size as Image, initialized to NIL CSE52, Spr 07
26 Some notes How deep does stack go? Iterative algorithms (See reading from Horn) Parallel algorithms CSE52, Spr 07
27 Properties extracted from binary image A tree showing containment of regions Properties of a region. Genus number of holes 2. Centroid 3. Area 4. Perimeter 5. Moments (e.g., measure of elongation) 6. Number of extrema (indentations, bulges) 7. Skeleton CSE52, Spr 07
28 B(x,y) Moments 0 The region S is defined as: B Given a pair of non-negative negative integers (j,k) the discrete (j,k) th moment of S is defined as: CSE52, Spr 07 M n m = j, k B( x, y) x= y= x j y k Fast way to implement computation over n by m image or window One object
29 Area: Moment M 00 0 Example: Area of S!! CSE52, Spr 07
30 Moments: Centroid 0 Example: Center of gravity (Centroid) of S!! CSE52, Spr 07
31 Shape recognition by Moments 0? = 0 Recognition could be done by comparing moments However, moments M jk are not invariant under: Translation Scaling Rotation Skewing CSE52, Spr 07
32 Central Moments 0 Given a pair of non-negative negative integers (j,k) the central (j,k) th moment of S is given by: CSE52, Spr 07
33 Central Moments 0 Translation by T = (a,b) : 0 Translation INVARIANT! CSE52, Spr 07
34 Normalized Moments 0 Given a pair of non-negative negative integers (j,k) the normalized (j,k) th moment of S is given by: CSE52, Spr 07
35 Normalized Moments 0 Scaling by (a,c) and translating by T = (b,d) : 0 Scaling and translation INVARIANT! CSE52, Spr 07
36 Region orientation from Second Moment Matrix Second Centralized Moment Matrix μ μ 20 μ μ 02 CSE52, Spr 07 Eigenvectors of Moment Matrix give orientation
Announcements. Analysis of Binary Images. Color Reflectance
 Announcements Analysis of Binary Images HW0 returned HW1 due Thursday Wed 10:00, Discussion Section EBU3b 2217 Introduction to Computer Vision CSE 152 Lecture 7 The appearance of colors Color appearance
Announcements Analysis of Binary Images HW0 returned HW1 due Thursday Wed 10:00, Discussion Section EBU3b 2217 Introduction to Computer Vision CSE 152 Lecture 7 The appearance of colors Color appearance
Announcements. The principle of trichromacy. Color Matching Functions. The appearance of colors
 Announcements Introduction to Computer Vision CSE 152 Lecture 7` HW1 due on Thursday See links on web page for reading Section: Mondays 3:00-3:50PM, Pepper Canyon Hall, Rm. 120 Kriegman Office Hrs: Tuesday
Announcements Introduction to Computer Vision CSE 152 Lecture 7` HW1 due on Thursday See links on web page for reading Section: Mondays 3:00-3:50PM, Pepper Canyon Hall, Rm. 120 Kriegman Office Hrs: Tuesday
CSE 152 Lecture 7. Intro Computer Vision
 Introduction to Computer Vision CSE 152 Lecture 7 Binary Tracking for Robot Control Binary System Summary 1. Acquire images and binarize (tresholding, color labels, etc.). 2. Possibly clean up image using
Introduction to Computer Vision CSE 152 Lecture 7 Binary Tracking for Robot Control Binary System Summary 1. Acquire images and binarize (tresholding, color labels, etc.). 2. Possibly clean up image using
Announcements. Binary Image Processing. Binary System Summary. Histogram-based Segmentation. How do we select a Threshold?
 Announcements Binary Image Processing Homework is due Apr 24, :59 PM Homework 2 will be assigned this week Reading: Chapter 3 Image processing CSE 52 Lecture 8 Binary System Summary. Acquire images and
Announcements Binary Image Processing Homework is due Apr 24, :59 PM Homework 2 will be assigned this week Reading: Chapter 3 Image processing CSE 52 Lecture 8 Binary System Summary. Acquire images and
CSE 152 Lecture 7` Intro Computer Vision
 Introduction to Computer Vision CSE 152 Lecture 7` Announcements HW1 due on Thursday Kriegman Office Hours this week: Wednesday 1:00-2:00 pm. Binary Tracking for Robot Control Binary System Summary 1.
Introduction to Computer Vision CSE 152 Lecture 7` Announcements HW1 due on Thursday Kriegman Office Hours this week: Wednesday 1:00-2:00 pm. Binary Tracking for Robot Control Binary System Summary 1.
Color Matching Functions. The principle of trichromacy. CIE xyy (Chromaticity Space) Color spaces. Intro Computer Vision. CSE 152 Lecture 7`
 Color spaces. Intro Computer Vision. CSE 152 Lecture 7`") Introduction to Computer Vision CSE 152 Lecture 7` The principle of trichromacy slideintro from T. Darrel Computer Vision Color Matching Functions Experimental facts: Three primaries will work for most
Introduction to Computer Vision CSE 152 Lecture 7` The principle of trichromacy slideintro from T. Darrel Computer Vision Color Matching Functions Experimental facts: Three primaries will work for most
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Lighting. Camera s sensor. Lambertian Surface BRDF
 Lighting Introduction to Computer Vision CSE 152 Lecture 6 Special light sources Point sources Distant point sources Strip sources Area sources Common to think of lighting at infinity (a function on the
Lighting Introduction to Computer Vision CSE 152 Lecture 6 Special light sources Point sources Distant point sources Strip sources Area sources Common to think of lighting at infinity (a function on the
Color to Binary Vision. The assignment Irfanview: A good utility Two parts: More challenging (Extra Credit) Lighting.
 Lighting.") Announcements Color to Binary Vision CSE 90-B Lecture 5 First assignment was available last Thursday Use whatever language you want. Link to matlab resources from web page Always check web page for updates
Announcements Color to Binary Vision CSE 90-B Lecture 5 First assignment was available last Thursday Use whatever language you want. Link to matlab resources from web page Always check web page for updates
Processing of binary images
 Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Image Segmentation. Segmentation is the process of partitioning an image into regions
 Image Segmentation Segmentation is the process of partitioning an image into regions region: group of connected pixels with similar properties properties: gray levels, colors, textures, motion characteristics
Image Segmentation Segmentation is the process of partitioning an image into regions region: group of connected pixels with similar properties properties: gray levels, colors, textures, motion characteristics
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Image Processing. Bilkent University. CS554 Computer Vision Pinar Duygulu
 Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
CSE152a Computer Vision Assignment 2 WI14 Instructor: Prof. David Kriegman. Revision 1
 CSE152a Computer Vision Assignment 2 WI14 Instructor: Prof. David Kriegman. Revision 1 Instructions: This assignment should be solved, and written up in groups of 2. Work alone only if you can not find
CSE152a Computer Vision Assignment 2 WI14 Instructor: Prof. David Kriegman. Revision 1 Instructions: This assignment should be solved, and written up in groups of 2. Work alone only if you can not find
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
Problem definition Image acquisition Image segmentation Connected component analysis. Machine vision systems - 1
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
CS534 Introduction to Computer Vision Binary Image Analysis. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
Announcements. Lighting. Camera s sensor. HW1 has been posted See links on web page for readings on color. Intro Computer Vision.
 Announcements HW1 has been posted See links on web page for readings on color. Introduction to Computer Vision CSE 152 Lecture 6 Deviations from the lens model Deviations from this ideal are aberrations
Announcements HW1 has been posted See links on web page for readings on color. Introduction to Computer Vision CSE 152 Lecture 6 Deviations from the lens model Deviations from this ideal are aberrations
CS 490: Computer Vision Image Segmentation: Thresholding. Fall 2015 Dr. Michael J. Reale
 CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
Robot vision review. Martin Jagersand
 Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Introduction to Computer Vision. Human Eye Sampling
 Human Eye Sampling Sampling Rough Idea: Ideal Case 23 "Digitized Image" "Continuous Image" Dirac Delta Function 2D "Comb" δ(x,y) = 0 for x = 0, y= 0 s δ(x,y) dx dy = 1 f(x,y)δ(x-a,y-b) dx dy = f(a,b) δ(x-ns,y-ns)
Human Eye Sampling Sampling Rough Idea: Ideal Case 23 "Digitized Image" "Continuous Image" Dirac Delta Function 2D "Comb" δ(x,y) = 0 for x = 0, y= 0 s δ(x,y) dx dy = 1 f(x,y)δ(x-a,y-b) dx dy = f(a,b) δ(x-ns,y-ns)
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
Announcements. Camera Calibration. Thin Lens: Image of Point. Limits for pinhole cameras. f O Z
 Announcements Introduction to Computer Vision CSE 152 Lecture 5 Assignment 1 has been posted. See links on web page for reading Irfanview: http://www.irfanview.com/ is a good windows utility for manipulating
Announcements Introduction to Computer Vision CSE 152 Lecture 5 Assignment 1 has been posted. See links on web page for reading Irfanview: http://www.irfanview.com/ is a good windows utility for manipulating
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
Motivation. Gray Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
EECS490: Digital Image Processing. Lecture #22
 Lecture #22 Gold Standard project images Otsu thresholding Local thresholding Region segmentation Watershed segmentation Frequency-domain techniques Project Images 1 Project Images 2 Project Images 3 Project
Lecture #22 Gold Standard project images Otsu thresholding Local thresholding Region segmentation Watershed segmentation Frequency-domain techniques Project Images 1 Project Images 2 Project Images 3 Project
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Computer Vision & Digital Image Processing. Image segmentation: thresholding
 Computer Vision & Digital Image Processing Image Segmentation: Thresholding Dr. D. J. Jackson Lecture 18-1 Image segmentation: thresholding Suppose an image f(y) is composed of several light objects on
Computer Vision & Digital Image Processing Image Segmentation: Thresholding Dr. D. J. Jackson Lecture 18-1 Image segmentation: thresholding Suppose an image f(y) is composed of several light objects on
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
(Sample) Final Exam with brief answers
 Final Exam with brief answers") Name: Perm #: (Sample) Final Exam with brief answers CS/ECE 181B Intro to Computer Vision March 24, 2017 noon 3:00 pm This is a closed-book test. There are also a few pages of equations, etc. included
Name: Perm #: (Sample) Final Exam with brief answers CS/ECE 181B Intro to Computer Vision March 24, 2017 noon 3:00 pm This is a closed-book test. There are also a few pages of equations, etc. included
Lecture: Segmentation I FMAN30: Medical Image Analysis. Anders Heyden
 Lecture: Segmentation I FMAN30: Medical Image Analysis Anders Heyden 2017-11-13 Content What is segmentation? Motivation Segmentation methods Contour-based Voxel/pixel-based Discussion What is segmentation?
Lecture: Segmentation I FMAN30: Medical Image Analysis Anders Heyden 2017-11-13 Content What is segmentation? Motivation Segmentation methods Contour-based Voxel/pixel-based Discussion What is segmentation?
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Image Acquisition + Histograms
 Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
Computer Graphics and Image Processing
 Computer Graphics and Image Processing Lecture B2 Point Processing Joseph Niepce, 1826. The view from my window 1 Context How much input is used to compute an output value? Point Transforms Region Transforms
Computer Graphics and Image Processing Lecture B2 Point Processing Joseph Niepce, 1826. The view from my window 1 Context How much input is used to compute an output value? Point Transforms Region Transforms
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Introduction to color science
 Introduction to color science Trichromacy Spectral matching functions CIE XYZ color system xy-chromaticity diagram Color gamut Color temperature Color balancing algorithms Digital Image Processing: Bernd
Introduction to color science Trichromacy Spectral matching functions CIE XYZ color system xy-chromaticity diagram Color gamut Color temperature Color balancing algorithms Digital Image Processing: Bernd
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 10 Part-2 Skeletal Models and Face Detection March 21, 2014 Sam Siewert Outline of Week 10 Lab #4 Overview Lab #5 and #6 Extended Lab Overview SIFT and SURF High
Computer and Machine Vision Lecture Week 10 Part-2 Skeletal Models and Face Detection March 21, 2014 Sam Siewert Outline of Week 10 Lab #4 Overview Lab #5 and #6 Extended Lab Overview SIFT and SURF High
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Corner Detection. GV12/3072 Image Processing.
 Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Digital Image Processing. Lecture # 15 Image Segmentation & Texture
 Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Requirements for region detection
 Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Filtering and Enhancing Images
 KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Edge Detection. CS664 Computer Vision. 3. Edges. Several Causes of Edges. Detecting Edges. Finite Differences. The Gradient
 Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Image Features. Work on project 1. All is Vanity, by C. Allan Gilbert,
 Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Object Shape Recognition in Image for Machine Vision Application
 Object Shape Recognition in Image for Machine Vision Application Mohd Firdaus Zakaria, Hoo Seng Choon, and Shahrel Azmin Suandi Abstract Vision is the most advanced of our senses, so it is not surprising
Object Shape Recognition in Image for Machine Vision Application Mohd Firdaus Zakaria, Hoo Seng Choon, and Shahrel Azmin Suandi Abstract Vision is the most advanced of our senses, so it is not surprising
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Image processing. Reading. What is an image? Brian Curless CSE 457 Spring 2017
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Previously. Edge detection. Today. Thresholding. Gradients -> edges 2/1/2011. Edges and Binary Image Analysis
 2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Digital Image Processing Chapter 11: Image Description and Representation
 Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Edge detection. Goal: Identify sudden. an image. Ideal: artist s line drawing. object-level knowledge)
") Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Lecture 10: Image Descriptors and Representation
 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
Chapter 11 Representation & Description
 Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Biomedical Image Analysis. Mathematical Morphology
 Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
CS 5540 Spring 2013 Assignment 3, v1.0 Due: Apr. 24th 11:59PM
 1 Introduction In this programming project, we are going to do a simple image segmentation task. Given a grayscale image with a bright object against a dark background and we are going to do a binary decision
1 Introduction In this programming project, we are going to do a simple image segmentation task. Given a grayscale image with a bright object against a dark background and we are going to do a binary decision
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)