Chapter 11 Representation & Description
|
|
|
- Bethanie Dickerson
- 6 years ago
- Views:
Transcription
1 Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics (its boundary): focus on shape - internal characteristics (its internal pixels): focus on color, textures The next step: description E.g.: a region may be represented by its boundary, and its boundary described by some features such as length, regularity Features should be insensitive to translation, rotation, and scaling. Both boundary and regional descriptors are often used together.
2 Representation of boundaries In order to represent a boundary, it is useful to compact the raw data (list of boundary pixels) Chain codes: list of segments with defined length and direction - 4-directional chain codes - 8-directional chain codes
3 Representation of boundaries It may be useful to downsample the data before computing the chain code - to reduce the code dimension - to remove small detail along the boundary
4 Representation of boundaries To remove the dependence from the starting point: the code is a circular sequence, the new starting point is the one who gives a sequence of numbers giving the smallest integer To normalize wrt rotation: first differences can be used E.g., > (counting ccw) and adding the last transition (circular sequence: 2 -> 1) ->
5 Representation of boundaries A signature is a 1-D representation of a boundary (which is a 2-D thing): it should be easier to describe. E.g.: distance from the centroid vs angle.
6 Representation of boundaries Signatures are invariant to translation Invariance to rotation: depends on the starting point - the starting point could e.g. be the one farthest from the centroid Scaling varies the amplitude of the signature - invariance can be obtained by normalizing between 0 and 1, or - by dividing by the variance of the signature (does not work on Fig. 11.5(a) )
7 Representation of a shape One way to represent a shape is to reduce it to a graph, by obtaing its skeleton via thinning (skeletonization) MAT (medial axis transformation) algorithm - MAT is composed by all the points which have more than one closest boundary points ( prairie fire concept )
8 Boundary descriptors Simple descriptors - length (e.g., for chain code: hor+vert+2 1/2 *diagonal) - diameter (length of the major axis) - basic rectangle (formed by the major and the minor axis; encloses the boundary) and its eccentricity (major/minor axis).
9 Boundary descriptors Order of a shape: the number of digits Shape number: the first difference of smallest magnitude (treating the chain code as a circular sequence)

10 Boundary descriptors It is advisable to normalize the grid orientation by aligning the chain code grid to the basic rectangle
11 Boundary descriptors The sequence of boundary points can be treated as a sequence of complex points in the complex plane - It becomes a 1-D descriptor - Can be DFT-transformed
12 Boundary descriptors The boundary can be approximated (by dropping DFT coefficients)
13 Boundary descriptors Fourier descriptors are not insensitive to translation..., but effects on the transform coefficients are known
14 Boundary descriptors Statistical moments Once a boundary is described as a 1-D function, statistical moments (mean, variance, and a few higher-order central moments) can be used to describe it: µ n (v)=σ i (v i -m) n p(v i ) with m=σ i v i p(v i )


15 Regional descriptors Some simple descriptors - Area - Compactness =perimeter 2 /area - In the figure -> (white area)/(total light area) gives an idea of relative electrical energy consumption
16 Regional descriptors Topology is the study of the properties which are unaffected by any deformation (rubber-sheet distortion) - number of holes H - number of connected components C - Euler number, E=C-H



17 Regional descriptors Digital Image Processing Fig b: C=1591, E=1552 -> H=39 Fig. c: the connected component with the largest number of pixels, 8479



18 Regional descriptors Texture descriptors are related to smoothness, coarseness, regularity
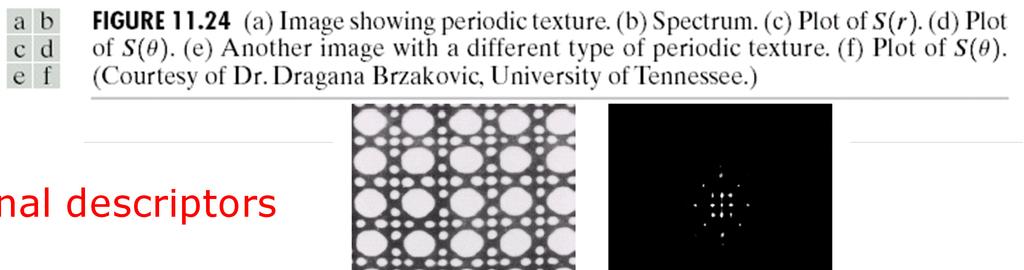
19 Regional descriptors - Statistical approaches give indications such as smooth, coarse, grainy - Spectral techniques are related to DFT and can detect global periodicities -
![Regional descriptors: some statistical descriptors - Statistical moments µ n (z)=σ (z i -m) n p(z i ) of the gray-level histogram p(z i ) - R R=1-[1+σ 2 ] -1 (R=0](/docs-images/74/69915832/images/20-0.jpg "in flat areas, -> 1 in active ones) - Uniformity U=Σ p 2 (z i ) (maximum if all gray levels are equal) - Entropy e=-σ p(z i ) log 2 p(z i ) (is 0 for a constant")
20 Regional descriptors: some statistical descriptors - Statistical moments µ n (z)=σ (z i -m) n p(z i ) of the gray-level histogram p(z i ) - R R=1-[1+σ 2 ] -1 (R=0 in flat areas, -> 1 in active ones) - Uniformity U=Σ p 2 (z i ) (maximum if all gray levels are equal) - Entropy e=-σ p(z i ) log 2 p(z i ) (is 0 for a constant image)
21 Regional descriptors Fourier spectrum features: - peaks give principal directions of the patterns - location of the peaks gives the fundamental period(s) - periodic components can be removed via filtering; the remaining non periodic image can be analyzed using statistical techniques The spectrum can be also studied in polar coordinates S(r,θ) For each pair r,θ, we can have two descriptors S(r)=Σ θ S θ (r) S(θ)=Σ r S r (θ)

22 Regional descriptors
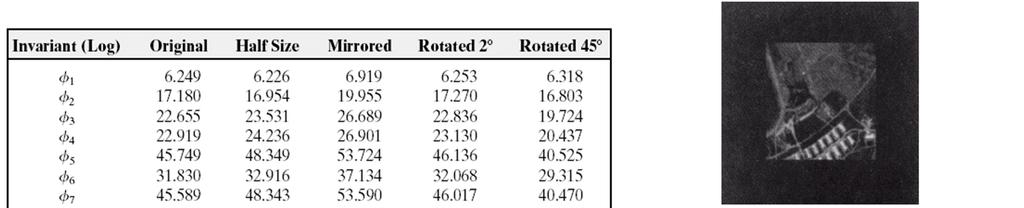
23 Regional descriptors Moments of 2-D functions Moment: m pq =ΣΣx p y q f(x,y) Central moment: µ pq =ΣΣ(x-x ) p( y-y ) q f(x,y) with x =m 10 /m 00 and y =m 01 /m 00 It may be found that, e.g. µ 11 =m 11 -y m 10 µ 30 =m 30-3x m 20 +2x 2 m 10 If we define the normalized central moments η pq =µ pq /µ γ 00 with γ=(p+q)/2+1 some invariant moments can be defined, e.g. φ 1 =η 20 η 02 φ 2 =(η 20 -η 02 ) 2 +4η 112 which are invariant to translation, rotation, and scaling

24 Regional descriptors
25 Descriptors for video sequences MPEG-1/2/4 make content available, whereas MPEG-7 allows you to find the content you need! A content description standard» Video/images: Shape, size, texture, color, movements, positions, etc» Audio: Key, mood, tempo, changes, position in sound space, etc Applications:» Digital Libraries» Multimedia Directory Services» Broadcast Media Selection» Editing, etc Example: Draw an object and be able to find object with similar characteristics. Play a note of music and be able to find similar type of music
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
Lecture 10: Image Descriptors and Representation
 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Digital Image Processing Chapter 11: Image Description and Representation
 Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Machine vision. Summary # 6: Shape descriptors
 Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
- Low-level image processing Image enhancement, restoration, transformation
 () Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
() Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
Lecture 18 Representation and description I. 2. Boundary descriptors
 Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Ulrik Söderström 21 Feb Representation and description
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Feature description. IE PŁ M. Strzelecki, P. Strumiłło
 Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Afdeling Toegepaste Wiskunde/ Division of Applied Mathematics Representation and description(skeletonization, shape numbers) SLIDE 1/16
 SLIDE 1/16") Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
OBJECT DESCRIPTION - FEATURE EXTRACTION
 INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
Digital Image Processing. Lecture # 15 Image Segmentation & Texture
 Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Multimedia Information Retrieval
 Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Why content-based? Actually, what is content-based
Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Why content-based? Actually, what is content-based
Generic Fourier Descriptor for Shape-based Image Retrieval
 1 Generic Fourier Descriptor for Shape-based Image Retrieval Dengsheng Zhang, Guojun Lu Gippsland School of Comp. & Info Tech Monash University Churchill, VIC 3842 Australia dengsheng.zhang@infotech.monash.edu.au
1 Generic Fourier Descriptor for Shape-based Image Retrieval Dengsheng Zhang, Guojun Lu Gippsland School of Comp. & Info Tech Monash University Churchill, VIC 3842 Australia dengsheng.zhang@infotech.monash.edu.au
Matching and Recognition in 3D. Based on slides by Tom Funkhouser and Misha Kazhdan
 Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Examination in Image Processing
 Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
SUMMARY PART I. What is texture? Uses for texture analysis. Computing texture images. Using variance estimates. INF 4300 Digital Image Analysis
 INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
MPEG-7 Visual shape descriptors
 MPEG-7 Visual shape descriptors Miroslaw Bober presented by Peter Tylka Seminar on scientific soft skills 22.3.2012 Presentation Outline Presentation Outline Introduction to problem Shape spectrum - 3D
MPEG-7 Visual shape descriptors Miroslaw Bober presented by Peter Tylka Seminar on scientific soft skills 22.3.2012 Presentation Outline Presentation Outline Introduction to problem Shape spectrum - 3D
Processing of binary images
 Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/05 TEXTURE ANALYSIS
 ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
Feature extraction. Bi-Histogram Binarization Entropy. What is texture Texture primitives. Filter banks 2D Fourier Transform Wavlet maxima points
 Feature extraction Bi-Histogram Binarization Entropy What is texture Texture primitives Filter banks 2D Fourier Transform Wavlet maxima points Edge detection Image gradient Mask operators Feature space
Feature extraction Bi-Histogram Binarization Entropy What is texture Texture primitives Filter banks 2D Fourier Transform Wavlet maxima points Edge detection Image gradient Mask operators Feature space
Autoregressive and Random Field Texture Models
 1 Autoregressive and Random Field Texture Models Wei-Ta Chu 2008/11/6 Random Field 2 Think of a textured image as a 2D array of random numbers. The pixel intensity at each location is a random variable.
1 Autoregressive and Random Field Texture Models Wei-Ta Chu 2008/11/6 Random Field 2 Think of a textured image as a 2D array of random numbers. The pixel intensity at each location is a random variable.
Evaluation of MPEG-7 shape descriptors against other shape descriptors
 Multimedia Systems 9: 15 3 (23) Digital Object Identifier (DOI) 1.17/s53-2-75-y Multimedia Systems Springer-Verlag 23 Evaluation of MPEG-7 shape descriptors against other shape descriptors Dengsheng Zhang,
Multimedia Systems 9: 15 3 (23) Digital Object Identifier (DOI) 1.17/s53-2-75-y Multimedia Systems Springer-Verlag 23 Evaluation of MPEG-7 shape descriptors against other shape descriptors Dengsheng Zhang,
Shape Matching. Michael Kazhdan ( /657)
") Shape Matching Michael Kazhdan (601.457/657) Overview Intro General Approach Minimum SSD Descriptor Goal Given a database of 3D models, and given a query shape, find the database models that are most similar
Shape Matching Michael Kazhdan (601.457/657) Overview Intro General Approach Minimum SSD Descriptor Goal Given a database of 3D models, and given a query shape, find the database models that are most similar
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection
 A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection Tudor Barbu Institute of Computer Science, Iaşi, Romania Abstract We have focused on a set of problems related to
A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection Tudor Barbu Institute of Computer Science, Iaşi, Romania Abstract We have focused on a set of problems related to
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
CS534 Introduction to Computer Vision Binary Image Analysis. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Biomedical Image Analysis. Point, Edge and Line Detection
 Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Digital Image Processing (EI424)
") Scheme of evaluation Digital Image Processing (EI424) Eighth Semester,April,2017. IV/IV B.Tech (Regular) DEGREE EXAMINATIONS ELECTRONICS AND INSTRUMENTATION ENGINEERING April,2017 Digital Image Processing
Scheme of evaluation Digital Image Processing (EI424) Eighth Semester,April,2017. IV/IV B.Tech (Regular) DEGREE EXAMINATIONS ELECTRONICS AND INSTRUMENTATION ENGINEERING April,2017 Digital Image Processing
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
4 Parametrization of closed curves and surfaces
 4 Parametrization of closed curves and surfaces Parametrically deformable models give rise to the question of obtaining parametrical descriptions of given pixel or voxel based object contours or surfaces,
4 Parametrization of closed curves and surfaces Parametrically deformable models give rise to the question of obtaining parametrical descriptions of given pixel or voxel based object contours or surfaces,
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT
 CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
Image Enhancement in Spatial Domain (Chapter 3)
") Image Enhancement in Spatial Domain (Chapter 3) Yun Q. Shi shi@njit.edu Fall 11 Mask/Neighborhood Processing ECE643 2 1 Point Processing ECE643 3 Image Negatives S = (L 1) - r (3.2-1) Point processing
Image Enhancement in Spatial Domain (Chapter 3) Yun Q. Shi shi@njit.edu Fall 11 Mask/Neighborhood Processing ECE643 2 1 Point Processing ECE643 3 Image Negatives S = (L 1) - r (3.2-1) Point processing
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Analysis of Binary Images
 Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
Anne Solberg
 INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
Multimedia Information Retrieval
 Multimedia Information Retrieval Norbert Fuhr Tutorial @ HS-IR 98 Chapter 1 Introduction document structures and attributes media types terminology 1 Document structures and attributes IR networks heterogeneity
Multimedia Information Retrieval Norbert Fuhr Tutorial @ HS-IR 98 Chapter 1 Introduction document structures and attributes media types terminology 1 Document structures and attributes IR networks heterogeneity
DTU M.SC. - COURSE EXAM Revised Edition
 Written test, 16 th of December 1999. Course name : 04250 - Digital Image Analysis Aids allowed : All usual aids Weighting : All questions are equally weighed. Name :...................................................
Written test, 16 th of December 1999. Course name : 04250 - Digital Image Analysis Aids allowed : All usual aids Weighting : All questions are equally weighed. Name :...................................................
Fourier Descriptors. Properties and Utility in Leaf Classification. ECE 533 Fall Tyler Karrels
 Fourier Descriptors Properties and Utility in Leaf Classification ECE 533 Fall 2006 Tyler Karrels Introduction Now that large-scale data storage is feasible due to the large capacity and low cost of hard
Fourier Descriptors Properties and Utility in Leaf Classification ECE 533 Fall 2006 Tyler Karrels Introduction Now that large-scale data storage is feasible due to the large capacity and low cost of hard
13. Brewster angle measurement
 13. Brewster angle measurement Brewster angle measurement Objective: 1. Verification of Malus law 2. Measurement of reflection coefficient of a glass plate for p- and s- polarizations 3. Determination
13. Brewster angle measurement Brewster angle measurement Objective: 1. Verification of Malus law 2. Measurement of reflection coefficient of a glass plate for p- and s- polarizations 3. Determination
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
SUMMARY PART I. Variance, 2, is directly a measure of roughness. A bounded measure of smoothness is
 Digital Image Analsis SUMMARY PART I Fritz Albregtsen 4..6 Teture description of regions Remember: we estimate local properties (features) to be able to isolate regions which are similar in an image (segmentation),
Digital Image Analsis SUMMARY PART I Fritz Albregtsen 4..6 Teture description of regions Remember: we estimate local properties (features) to be able to isolate regions which are similar in an image (segmentation),
Schedule for Rest of Semester
 Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
IN5520 Digital Image Analysis. Two old exams. Practical information for any written exam Exam 4300/9305, Fritz Albregtsen
 IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
Introducing Robotics Vision System to a Manufacturing Robotics Course
 Paper ID #16241 Introducing Robotics Vision System to a Manufacturing Robotics Course Dr. Yuqiu You, Ohio University c American Society for Engineering Education, 2016 Introducing Robotics Vision System
Paper ID #16241 Introducing Robotics Vision System to a Manufacturing Robotics Course Dr. Yuqiu You, Ohio University c American Society for Engineering Education, 2016 Introducing Robotics Vision System
COMP_4190 Artificial Intelligence Computer Vision. Computer Vision. Levels of Abstraction. Digital Images
 COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
CSE 152 Lecture 7. Intro Computer Vision
 Introduction to Computer Vision CSE 152 Lecture 7 Binary Tracking for Robot Control Binary System Summary 1. Acquire images and binarize (tresholding, color labels, etc.). 2. Possibly clean up image using
Introduction to Computer Vision CSE 152 Lecture 7 Binary Tracking for Robot Control Binary System Summary 1. Acquire images and binarize (tresholding, color labels, etc.). 2. Possibly clean up image using
ANSYS AIM Tutorial Structural Analysis of a Plate with Hole
 ANSYS AIM Tutorial Structural Analysis of a Plate with Hole Author(s): Sebastian Vecchi, ANSYS Created using ANSYS AIM 18.1 Problem Specification Pre-Analysis & Start Up Analytical vs. Numerical Approaches
ANSYS AIM Tutorial Structural Analysis of a Plate with Hole Author(s): Sebastian Vecchi, ANSYS Created using ANSYS AIM 18.1 Problem Specification Pre-Analysis & Start Up Analytical vs. Numerical Approaches
Analysis of Planar Anisotropy of Fibre Systems by Using 2D Fourier Transform
 Maroš Tunák, Aleš Linka Technical University in Liberec Faculty of Textile Engineering Department of Textile Materials Studentská 2, 461 17 Liberec 1, Czech Republic E-mail: maros.tunak@tul.cz ales.linka@tul.cz
Maroš Tunák, Aleš Linka Technical University in Liberec Faculty of Textile Engineering Department of Textile Materials Studentská 2, 461 17 Liberec 1, Czech Republic E-mail: maros.tunak@tul.cz ales.linka@tul.cz
Problem definition Image acquisition Image segmentation Connected component analysis. Machine vision systems - 1
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Filtering. -If we denote the original image as f(x,y), then the noisy image can be denoted as f(x,y)+n(x,y) where n(x,y) is a cosine function.
, then the noisy image can be denoted as f(x,y)+n(x,y) where n(x,y) is a cosine function.") Filtering -The image shown below has been generated by adding some noise in the form of a cosine function. -If we denote the original image as f(x,y), then the noisy image can be denoted as f(x,y)+n(x,y)
Filtering -The image shown below has been generated by adding some noise in the form of a cosine function. -If we denote the original image as f(x,y), then the noisy image can be denoted as f(x,y)+n(x,y)
Shape description and modelling
 COMP3204/COMP6223: Computer Vision Shape description and modelling Jonathon Hare jsh2@ecs.soton.ac.uk Extracting features from shapes represented by connected components Recap: Connected Component A connected
COMP3204/COMP6223: Computer Vision Shape description and modelling Jonathon Hare jsh2@ecs.soton.ac.uk Extracting features from shapes represented by connected components Recap: Connected Component A connected
FROM PIXELS TO REGIONS
 Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
CSE 152 Lecture 7` Intro Computer Vision
 Introduction to Computer Vision CSE 152 Lecture 7` Announcements HW1 due on Thursday Kriegman Office Hours this week: Wednesday 1:00-2:00 pm. Binary Tracking for Robot Control Binary System Summary 1.
Introduction to Computer Vision CSE 152 Lecture 7` Announcements HW1 due on Thursday Kriegman Office Hours this week: Wednesday 1:00-2:00 pm. Binary Tracking for Robot Control Binary System Summary 1.
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
A490 Machine Vision and Computer Graphics
 A490 Machine Vision and Computer Graphics Lecture Week 11 (More on Convolutions and Introduction to Boundary, Shape and Skeletal Models) November 6, 2012 Sam Siewert More on Convolution FCG Chapter 9 -
A490 Machine Vision and Computer Graphics Lecture Week 11 (More on Convolutions and Introduction to Boundary, Shape and Skeletal Models) November 6, 2012 Sam Siewert More on Convolution FCG Chapter 9 -
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 14, NO. 11, NOVEMBER Victor H. S. Ha, Member, IEEE, and José M. F. Moura, Fellow, IEEE
 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 14, NO. 11, NOVEMBER 2005 1687 Affine-Permutation Invariance of 2-D Shapes Victor H. S. Ha, Member, IEEE, and José M. F. Moura, Fellow, IEEE Abstract Shapes
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 14, NO. 11, NOVEMBER 2005 1687 Affine-Permutation Invariance of 2-D Shapes Victor H. S. Ha, Member, IEEE, and José M. F. Moura, Fellow, IEEE Abstract Shapes
Texture Analysis. Selim Aksoy Department of Computer Engineering Bilkent University
 Texture Analysis Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Texture An important approach to image description is to quantify its texture content. Texture
Texture Analysis Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Texture An important approach to image description is to quantify its texture content. Texture
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
A Study on Feature Extraction Techniques in Image Processing
 International Journal of Computer Sciences and Engineering Open Access Review Paper Volume-4, Special Issue-7, Dec 2016 ISSN: 2347-2693 A Study on Feature Extraction Techniques in Image Processing Shrabani
International Journal of Computer Sciences and Engineering Open Access Review Paper Volume-4, Special Issue-7, Dec 2016 ISSN: 2347-2693 A Study on Feature Extraction Techniques in Image Processing Shrabani
Color Matching Functions. The principle of trichromacy. CIE xyy (Chromaticity Space) Color spaces. Intro Computer Vision. CSE 152 Lecture 7`
 Color spaces. Intro Computer Vision. CSE 152 Lecture 7`") Introduction to Computer Vision CSE 152 Lecture 7` The principle of trichromacy slideintro from T. Darrel Computer Vision Color Matching Functions Experimental facts: Three primaries will work for most
Introduction to Computer Vision CSE 152 Lecture 7` The principle of trichromacy slideintro from T. Darrel Computer Vision Color Matching Functions Experimental facts: Three primaries will work for most
 DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
Robot vision review. Martin Jagersand
 Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
OCCHIO USA WHITE STONE VA TEL(866)
") PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
Pattern recognition. Classification/Clustering GW Chapter 12 (some concepts) Textures
 Textures") Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class: family of patterns
Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class: family of patterns
Image Enhancement: To improve the quality of images
 Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
Algorithms for Recognition of Low Quality Iris Images. Li Peng Xie University of Ottawa
 Algorithms for Recognition of Low Quality Iris Images Li Peng Xie University of Ottawa Overview Iris Recognition Eyelash detection Accurate circular localization Covariance feature with LDA Fourier magnitude
Algorithms for Recognition of Low Quality Iris Images Li Peng Xie University of Ottawa Overview Iris Recognition Eyelash detection Accurate circular localization Covariance feature with LDA Fourier magnitude
Image Restoration and Reconstruction
 Image Restoration and Reconstruction Image restoration Objective process to improve an image, as opposed to the subjective process of image enhancement Enhancement uses heuristics to improve the image
Image Restoration and Reconstruction Image restoration Objective process to improve an image, as opposed to the subjective process of image enhancement Enhancement uses heuristics to improve the image
NAME :... Signature :... Desk no. :... Question Answer
 Written test Tuesday 19th of December 2000. Aids allowed : All usual aids Weighting : All questions are equally weighted. NAME :................................................... Signature :...................................................
Written test Tuesday 19th of December 2000. Aids allowed : All usual aids Weighting : All questions are equally weighted. NAME :................................................... Signature :...................................................
Reconstruction of Images Distorted by Water Waves
 Reconstruction of Images Distorted by Water Waves Arturo Donate and Eraldo Ribeiro Computer Vision Group Outline of the talk Introduction Analysis Background Method Experiments Conclusions Future Work
Reconstruction of Images Distorted by Water Waves Arturo Donate and Eraldo Ribeiro Computer Vision Group Outline of the talk Introduction Analysis Background Method Experiments Conclusions Future Work
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Image Restoration and Reconstruction
 Image Restoration and Reconstruction Image restoration Objective process to improve an image Recover an image by using a priori knowledge of degradation phenomenon Exemplified by removal of blur by deblurring
Image Restoration and Reconstruction Image restoration Objective process to improve an image Recover an image by using a priori knowledge of degradation phenomenon Exemplified by removal of blur by deblurring
Image Processing Lecture 10
 Image Restoration Image restoration attempts to reconstruct or recover an image that has been degraded by a degradation phenomenon. Thus, restoration techniques are oriented toward modeling the degradation
Image Restoration Image restoration attempts to reconstruct or recover an image that has been degraded by a degradation phenomenon. Thus, restoration techniques are oriented toward modeling the degradation