Micro-scale Stereo Photogrammetry of Skin Lesions for Depth and Colour Classification
|
|
|
- Laurence Sanders
- 5 years ago
- Views:
Transcription
1 Micro-scale Stereo Photogrammetry of Skin Lesions for Depth and Colour Classification Tim Lukins Institute of Perception, Action and Behaviour 1 Introduction The classification of melanoma has traditionally relied on colour and intensity images as input to various rule/checklist based diagnosis. A variety of computer vision techniques are often applied to enhance and segment such data into more representative features, in order to then automate detection of tumours via statistical and machine learning techniques. Such approaches do however omit to take into account the information that could additionally be provided by depth, and the resulting description of the actual macro surface structure of the area in question. Only one other such system attempts to utilise this modality - the DERMA system of Callieri et al. [?]- which is based on laser scanning of a subject to obtain 3D and aligned colour information. In this investigation we consider another approach for capturing and evaluating via dense stereo photogrammetry - with all the benefits of instantaneous capture and perfect 1:1 alignment of colour information. We seek to test whether the inclusion of depth can indeed help distinguish between various dermatological types, showing that the actual surface structure may also yield a valuable source of features on which to base classification. This involves addressing issues in accurate 3D capture at a very fine scale, the conversion and processing of all channels of information to enhance features, and the analysis of what variations and distributions within the data can be used to differentiate. 2 Methodology 2.1 Data Five datasets were collected using a stereo capture rig constructed of two Canon EOS 300D cameras, calibrated and using the maximum level of magnification supported by the standard EF-S lens (0.28m closest focus distance). The dense stereo data was recovered from the two simultaneous images via stereo photogrammetry matching software. The resulting perspective depth-maps were constructed in the left image co-ordinate frame - resulting in a a one-to-one correspondence between z-depth and pixel colour values. From this complete data, a subject area of pixels was selected for each of the five data sets. At a captured scale of one pixel, this therefore represents a surface area of approximately. The subject areas were chosen to represent a variety of different dermatological types (available to us from those found on normal human skin, in the absence of actual cancer examples) and were as follows: Normal, Freckle, Liverspot, Mole, Scab. These are shown in Figure 1 - indicating the variations in depth, size, and colouration. The first dataset acts as a control - representing as it does an area of normal skin. Each dataset also shows the superimposed outline of the mask defining the specific region of interesting skin - all other sample pixels being designated surrounding skin. This represents the only division of the data, and was performed by tracing the outline of the regions. In the case of the control dataset, this boundary simply splits the data with a line down the middle. The depth information represents the z-axis distance from the sensor. Of immediate note is the fact that the samples were captured from a variety of curved body surfaces - by which the presence of surface features is often obscured by global structure. The first two of the actual samples ( freckle and liverspot ) are also affected by a profusion of hair follicles - which has disrupted the stereo recovery process. These are retained to present the situation when the depth information should therefore be discounted. The last two samples however ( mole and scab ) have managed to preserve a useful amount of depth detail.
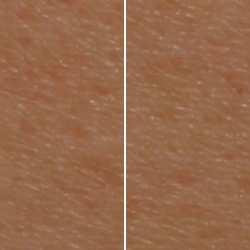


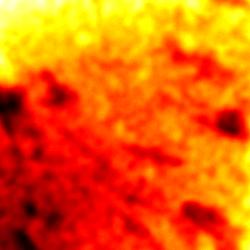
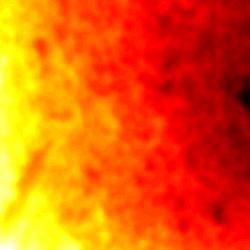



2 Figure 1. Colour/mask and depth. Top to bottom: normal, freckle, liverspot, mole, and scab.
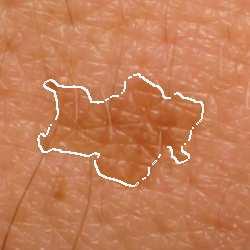
3 6 ( ( : I : : K : 6 ( U L % P S 1 S # 2.2 Processing Each of the datasets provides direct access to 7 channels of information. These represent for every pixel the z-depth, red, green, blue, hue, saturation, and value components. We are interested in accentuating various regions (e.g. rough areas), and to correct for global surface structure. To this end we adopt the following techniques described below. Local Variation The raw values of each channels can be processed to derive the mean difference for each pixel from its neighbourhood, in order to reflect local variation as: 1. Let "!$# be the value of the channel at pixel!. 2. Calculate the mean % for a neighbourhood of cardinality N. 3. Calculate the mean difference as: & '!#)(*+,-"!#. "!$# The calculation of the mean can be easily implemented as a square convolution matrix of dimensions / / (*0 with each value apart from the centre cell equalling e.g. For 05( : This process can be carried out to each of the pixels, for all the 7 channels, using the convolution shown - replicating edges with the nearest border value where necessary. Global Orientation The z-depth channel surface detail can be further revealed by fitting the depth-maps to an underlying surface orientation - assuming a simple plane in this case - and projecting the values onto that surface as: 1. Select the 4 corner point z values of a depth-map to construct least squares fitting matrix: : : ; := >; 1 < 1 C: ; 1<?A@AB F;?-@DBE< 1?A@ABG<?-@AB L4MONQPRNTS ;VU HJI 2. Derive co-efficients of the fitted plane by Singular Value Decomposition of this matrix: W XY #Z(\[^]_ E[ ;ed 3. Calculate projection of new depth data as: f ; f < g < g Ua`bc` LhM PR VU A Applying this process results in the corrected depth channels of the datasets shown in Figure 2. #Ai 2.3 Selection Using the mask provided for each dataset, it is possible to divide the point/pixel data into two sets - those within the boundary which are Interesting, and those out-with the boundary which are Surrounding. This selection can be additionally performed by a specified amount of erosion (using standard morphological operators) performed in either direction, the effects of which are to eliminate any ambiguous Border points - as shown for example in Figure 3. This results in the partitioning of the datasets as shown for example in Table 1. Notice that the various sizes of the subject areas results in a oversampling of the surrounding points for the smaller freckle and liverspot cases. Also, the larger the region, the longer the circumference of it s mask, and consequently the greater proportion of ambiguous border points which are ignored.






4 Figure 2. Projected depth-maps onto fitted planar surface Figure 3. Mask eroded +/- 20 pixels from boundary for mole dataset. Dataset Surround Interest Border Freckle Liverspot Mole Scab Table 1. Example division of datasets by erosion of +/- 10 pixels from boundary.
5 3 Results 3.1 Applying Local Variation For all datasets, every channel was separated and processed as described above for local variation and the resulting correlations between depth and the other channels were plotted as shown in Figure 6 (compared to normal skin variations in Figure 5a). These results would appear to show that localised variations in depth (and indeed the colour channels) do not provide sufficient variations to support any robust classification. There exists no global variations in the shape of the distributions between types, and furthermore no suitable separation between interesting and surrounding points. Principle Components Analysis (using the two largest eigenvectors) of the inclusion of depth data alongside the other 6 channels as a feature vector justifies this lack of useful variation, as shown by the similarity in Figure 4 in which no significant variation is contributed Interesting Skin Surrounding Skin Interesting Skin Surrounding Skin Figure 4. PCA projection of mole dataset. 3.2 Applying Global Orientation For all datasets, the z-depth was first projected onto a fitted planar surface to accommodate global orientation, with the resulting correlations between the projected depth and the unmodified colour channels plotted as shown in Figure 7 (compared to normal skin variations in Figure 5b). These results would appear to show considerably better potential for classification, by indicating a wide range of variations between datasets. As anticipated, the disrupted freckle and liverspot cases show no benefit with the addition of depth data to the ability to distinguish between surrounding and interesting skin. However, in the instances of mole and scab (where the stereo recovery process was unhindered) there is a good degree of separation between and within the data. It should be noted that applying global orientation, and then analysing local variation does not improve the distributions of the data. That is, it would appear that local surface structure requires a more complex approach for describing the local roughness of a region. 4 Conclusions In summary: the use of depth information as another modality for enhanced dermatological classification shows promise - but only under the guarantee that the data can be captured accurately and fitted to best preserve surface structure. Capturing the data accurately requires careful control of the environment lighting and of other factors that can affect the stereo recovery process - especially in the presence of hair follicles (i.e. shaving the skin area should be performed first). Fitting the data to best preserve surface structure might perform better with more complex underlying surfaces (e.g. cylinders) and in the means of then projecting the data onto that surface orthogonally. Furthermore, better localised analysis of local roughness would perhaps yield more representative features for a region (e.g. looking at the variation of surface normal incidence, or curvature of small patches).
6 This investigation has only looked at a very small sample size, and non-exotic subject regions. New camera calibration and specialist lenses could enable ever finer 3D information, and using image segmentation and more advanced classification techniques have the potential to greatly improve and fully automate the process of diagnosis. Figure 5. Correlations for normal dataset, split exactly into 2 arbitrary sets.
7 Figure 6. Local variation from mean for 3x3 neighbourhood (selection via border erosion +/- 10). Red, green, blue, hue, saturation and value channels plotted against depth for each dataset.
8 Figure 7. Global oriented depth data plotted against unmodified red, green, blue, hue, saturation and value channels for each dataset (selection via border erosion +/- 20).
Model-based segmentation and recognition from range data
 Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Product information. Hi-Tech Electronics Pte Ltd
 Product information Introduction TEMA Motion is the world leading software for advanced motion analysis. Starting with digital image sequences the operator uses TEMA Motion to track objects in images,
Product information Introduction TEMA Motion is the world leading software for advanced motion analysis. Starting with digital image sequences the operator uses TEMA Motion to track objects in images,
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation
 A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
InfoVis: a semiotic perspective
 InfoVis: a semiotic perspective p based on Semiology of Graphics by J. Bertin Infovis is composed of Representation a mapping from raw data to a visible representation Presentation organizing this visible
InfoVis: a semiotic perspective p based on Semiology of Graphics by J. Bertin Infovis is composed of Representation a mapping from raw data to a visible representation Presentation organizing this visible
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Implemented by Valsamis Douskos Laboratoty of Photogrammetry, Dept. of Surveying, National Tehnical University of Athens
 An open-source toolbox in Matlab for fully automatic calibration of close-range digital cameras based on images of chess-boards FAUCCAL (Fully Automatic Camera Calibration) Implemented by Valsamis Douskos
An open-source toolbox in Matlab for fully automatic calibration of close-range digital cameras based on images of chess-boards FAUCCAL (Fully Automatic Camera Calibration) Implemented by Valsamis Douskos
FOOTPRINTS EXTRACTION
 Building Footprints Extraction of Dense Residential Areas from LiDAR data KyoHyouk Kim and Jie Shan Purdue University School of Civil Engineering 550 Stadium Mall Drive West Lafayette, IN 47907, USA {kim458,
Building Footprints Extraction of Dense Residential Areas from LiDAR data KyoHyouk Kim and Jie Shan Purdue University School of Civil Engineering 550 Stadium Mall Drive West Lafayette, IN 47907, USA {kim458,
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
 DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS INTRODUCTION
 DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
General Principles of 3D Image Analysis
 General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
CS231A Course Project Final Report Sign Language Recognition with Unsupervised Feature Learning
 CS231A Course Project Final Report Sign Language Recognition with Unsupervised Feature Learning Justin Chen Stanford University justinkchen@stanford.edu Abstract This paper focuses on experimenting with
CS231A Course Project Final Report Sign Language Recognition with Unsupervised Feature Learning Justin Chen Stanford University justinkchen@stanford.edu Abstract This paper focuses on experimenting with
Simultaneous surface texture classification and illumination tilt angle prediction
 Simultaneous surface texture classification and illumination tilt angle prediction X. Lladó, A. Oliver, M. Petrou, J. Freixenet, and J. Martí Computer Vision and Robotics Group - IIiA. University of Girona
Simultaneous surface texture classification and illumination tilt angle prediction X. Lladó, A. Oliver, M. Petrou, J. Freixenet, and J. Martí Computer Vision and Robotics Group - IIiA. University of Girona
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Chapters 1 7: Overview
 Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Unsupervised learning in Vision
 Chapter 7 Unsupervised learning in Vision The fields of Computer Vision and Machine Learning complement each other in a very natural way: the aim of the former is to extract useful information from visual
Chapter 7 Unsupervised learning in Vision The fields of Computer Vision and Machine Learning complement each other in a very natural way: the aim of the former is to extract useful information from visual
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Visual Odometry. Features, Tracking, Essential Matrix, and RANSAC. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
4.5 VISIBLE SURFACE DETECTION METHODES
 4.5 VISIBLE SURFACE DETECTION METHODES A major consideration in the generation of realistic graphics displays is identifying those parts of a scene that are visible from a chosen viewing position. There
4.5 VISIBLE SURFACE DETECTION METHODES A major consideration in the generation of realistic graphics displays is identifying those parts of a scene that are visible from a chosen viewing position. There
CS 563 Advanced Topics in Computer Graphics Camera Models. by Kevin Kardian
 CS 563 Advanced Topics in Computer Graphics Camera Models by Kevin Kardian Introduction Pinhole camera is insufficient Everything in perfect focus Less realistic Different camera models are possible Create
CS 563 Advanced Topics in Computer Graphics Camera Models by Kevin Kardian Introduction Pinhole camera is insufficient Everything in perfect focus Less realistic Different camera models are possible Create
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Margarita Grinvald. Gesture recognition for Smartphones/Wearables
 Margarita Grinvald Gesture recognition for Smartphones/Wearables Gestures hands, face, body movements non-verbal communication human interaction 2 Gesture recognition interface with computers increase
Margarita Grinvald Gesture recognition for Smartphones/Wearables Gestures hands, face, body movements non-verbal communication human interaction 2 Gesture recognition interface with computers increase
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
The Detection of Faces in Color Images: EE368 Project Report
 The Detection of Faces in Color Images: EE368 Project Report Angela Chau, Ezinne Oji, Jeff Walters Dept. of Electrical Engineering Stanford University Stanford, CA 9435 angichau,ezinne,jwalt@stanford.edu
The Detection of Faces in Color Images: EE368 Project Report Angela Chau, Ezinne Oji, Jeff Walters Dept. of Electrical Engineering Stanford University Stanford, CA 9435 angichau,ezinne,jwalt@stanford.edu
RASNIK Image Processing with a Steepest Ascent Algorithm
 ATLAS Internal Note MUON-No-092 RASNIK Image Processing with a Steepest Ascent Algorithm Kevan S. Hashemi and James R. Bensinger Brandeis University August 1995 Introduction The RASNIK alignment instrument
ATLAS Internal Note MUON-No-092 RASNIK Image Processing with a Steepest Ascent Algorithm Kevan S. Hashemi and James R. Bensinger Brandeis University August 1995 Introduction The RASNIK alignment instrument
Visual Representation from Semiology of Graphics by J. Bertin
 Visual Representation from Semiology of Graphics by J. Bertin From a communication perspective Communication is too often taken for granted when it should be taken to pieces. (Fiske 91) Two basic schools
Visual Representation from Semiology of Graphics by J. Bertin From a communication perspective Communication is too often taken for granted when it should be taken to pieces. (Fiske 91) Two basic schools
On-line and Off-line 3D Reconstruction for Crisis Management Applications
 On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Creating a distortion characterisation dataset for visual band cameras using fiducial markers.
 Creating a distortion characterisation dataset for visual band cameras using fiducial markers. Robert Jermy Council for Scientific and Industrial Research Email: rjermy@csir.co.za Jason de Villiers Council
Creating a distortion characterisation dataset for visual band cameras using fiducial markers. Robert Jermy Council for Scientific and Industrial Research Email: rjermy@csir.co.za Jason de Villiers Council
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
MediaTek Video Face Beautify
 MediaTek Video Face Beautify November 2014 2014 MediaTek Inc. Table of Contents 1 Introduction... 3 2 The MediaTek Solution... 4 3 Overview of Video Face Beautify... 4 4 Face Detection... 6 5 Skin Detection...
MediaTek Video Face Beautify November 2014 2014 MediaTek Inc. Table of Contents 1 Introduction... 3 2 The MediaTek Solution... 4 3 Overview of Video Face Beautify... 4 4 Face Detection... 6 5 Skin Detection...
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION INTRODUCTION
 BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION Ruijin Ma Department Of Civil Engineering Technology SUNY-Alfred Alfred, NY 14802 mar@alfredstate.edu ABSTRACT Building model reconstruction has been
BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION Ruijin Ma Department Of Civil Engineering Technology SUNY-Alfred Alfred, NY 14802 mar@alfredstate.edu ABSTRACT Building model reconstruction has been
FLOW VISUALISATION OF POLYMER MELT CONTRACTION FLOWS FOR VALIDATION OF NUMERICAL SIMULATIONS
 FLOW VISUALISATION OF POLYMER MELT CONTRACTION FLOWS FOR VALIDATION OF NUMERICAL SIMULATIONS R Spares, T Gough, M T Martyn, P Olley and P D Coates IRC in Polymer Science & Technology, Mechanical & Medical
FLOW VISUALISATION OF POLYMER MELT CONTRACTION FLOWS FOR VALIDATION OF NUMERICAL SIMULATIONS R Spares, T Gough, M T Martyn, P Olley and P D Coates IRC in Polymer Science & Technology, Mechanical & Medical
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
Detecting motion by means of 2D and 3D information
 Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Towards direct motion and shape parameter recovery from image sequences. Stephen Benoit. Ph.D. Thesis Presentation September 25, 2003
 Towards direct motion and shape parameter recovery from image sequences Stephen Benoit Ph.D. Thesis Presentation September 25, 2003 September 25, 2003 Towards direct motion and shape parameter recovery
Towards direct motion and shape parameter recovery from image sequences Stephen Benoit Ph.D. Thesis Presentation September 25, 2003 September 25, 2003 Towards direct motion and shape parameter recovery
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Cadastre - Preliminary Results
 Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
MAPI Computer Vision. Multiple View Geometry
 MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
3D Pose Estimation of Cactus Leaves using an Active Shape Model
 3D Pose Estimation of Cactus Leaves using an Active Shape Model Thomas B. Moeslund, Michael Aagaard, Dennis Lerche Laboratory of Computer Vision and Media Technology Aalborg University, Denmark E-mail:
3D Pose Estimation of Cactus Leaves using an Active Shape Model Thomas B. Moeslund, Michael Aagaard, Dennis Lerche Laboratory of Computer Vision and Media Technology Aalborg University, Denmark E-mail:
3D Scanning. Lecture courtesy of Szymon Rusinkiewicz Princeton University
 3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy
 Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy Sharjeel Anwar, Dr. Shoaib, Taosif Iqbal, Mohammad Saqib Mansoor, Zubair
Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy Sharjeel Anwar, Dr. Shoaib, Taosif Iqbal, Mohammad Saqib Mansoor, Zubair
CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION
 60 CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION 3.1 IMPORTANCE OF OPTIC DISC Ocular fundus images provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular
60 CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION 3.1 IMPORTANCE OF OPTIC DISC Ocular fundus images provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular
Plant and Canopy Reconstruction User Documentation. The University of Nottingham
 Plant and Canopy Reconstruction User Documentation The University of Nottingham 2014 Table of Contents Overview... 2 Introduction... 2 Program Input... 3 Point Clouds... 3 Image Sets and Camera Geometries...
Plant and Canopy Reconstruction User Documentation The University of Nottingham 2014 Table of Contents Overview... 2 Introduction... 2 Program Input... 3 Point Clouds... 3 Image Sets and Camera Geometries...
Vehicle Dimensions Estimation Scheme Using AAM on Stereoscopic Video
 Workshop on Vehicle Retrieval in Surveillance (VRS) in conjunction with 2013 10th IEEE International Conference on Advanced Video and Signal Based Surveillance Vehicle Dimensions Estimation Scheme Using
Workshop on Vehicle Retrieval in Surveillance (VRS) in conjunction with 2013 10th IEEE International Conference on Advanced Video and Signal Based Surveillance Vehicle Dimensions Estimation Scheme Using
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Design Intent of Geometric Models
 School of Computer Science Cardiff University Design Intent of Geometric Models Frank C. Langbein GR/M78267 GR/S69085/01 NUF-NAL 00638/G Massey University 22nd September 2004; Version 1.0 Design Intent
School of Computer Science Cardiff University Design Intent of Geometric Models Frank C. Langbein GR/M78267 GR/S69085/01 NUF-NAL 00638/G Massey University 22nd September 2004; Version 1.0 Design Intent
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
NAME: Sample Final Exam (based on previous CSE 455 exams by Profs. Seitz and Shapiro)
") Computer Vision Prof. Rajesh Rao TA: Jiun-Hung Chen CSE 455 Winter 2009 Sample Final Exam (based on previous CSE 455 exams by Profs. Seitz and Shapiro) Write your name at the top of every page. Directions
Computer Vision Prof. Rajesh Rao TA: Jiun-Hung Chen CSE 455 Winter 2009 Sample Final Exam (based on previous CSE 455 exams by Profs. Seitz and Shapiro) Write your name at the top of every page. Directions
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
And. Modal Analysis. Using. VIC-3D-HS, High Speed 3D Digital Image Correlation System. Indian Institute of Technology New Delhi
 Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Constructing a 3D Object Model from Multiple Visual Features
 Constructing a 3D Object Model from Multiple Visual Features Jiang Yu Zheng Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology Iizuka, Fukuoka 820, Japan Abstract This work
Constructing a 3D Object Model from Multiple Visual Features Jiang Yu Zheng Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology Iizuka, Fukuoka 820, Japan Abstract This work
Contours & Implicit Modelling 4
 Brief Recap Contouring & Implicit Modelling Contouring Implicit Functions Visualisation Lecture 8 lecture 6 Marching Cubes lecture 3 visualisation of a Quadric toby.breckon@ed.ac.uk Computer Vision Lab.
Brief Recap Contouring & Implicit Modelling Contouring Implicit Functions Visualisation Lecture 8 lecture 6 Marching Cubes lecture 3 visualisation of a Quadric toby.breckon@ed.ac.uk Computer Vision Lab.
Detection of Melanoma Skin Cancer using Segmentation and Classification Algorithm
 Detection of Melanoma Skin Cancer using Segmentation and Classification Algorithm Mrs. P. Jegadeeshwari Assistant professor/ece CK College of Engineering &Technology Abstract - Melanoma is the most dangerous
Detection of Melanoma Skin Cancer using Segmentation and Classification Algorithm Mrs. P. Jegadeeshwari Assistant professor/ece CK College of Engineering &Technology Abstract - Melanoma is the most dangerous
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
3D Computer Vision. Structure from Motion. Prof. Didier Stricker
 3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
Module 4F12: Computer Vision and Robotics Solutions to Examples Paper 2
 Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered
Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
(0, 1, 1) (0, 1, 1) (0, 1, 0) What is light? What is color? Terminology
 (0, 1, 1) (0, 1, 0) What is light? What is color? Terminology") lecture 23 (0, 1, 1) (0, 0, 0) (0, 0, 1) (0, 1, 1) (1, 1, 1) (1, 1, 0) (0, 1, 0) hue - which ''? saturation - how pure? luminance (value) - intensity What is light? What is? Light consists of electromagnetic
lecture 23 (0, 1, 1) (0, 0, 0) (0, 0, 1) (0, 1, 1) (1, 1, 1) (1, 1, 0) (0, 1, 0) hue - which ''? saturation - how pure? luminance (value) - intensity What is light? What is? Light consists of electromagnetic
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques
 Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques Sea Chen Department of Biomedical Engineering Advisors: Dr. Charles A. Bouman and Dr. Mark J. Lowe S. Chen Final Exam October
Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques Sea Chen Department of Biomedical Engineering Advisors: Dr. Charles A. Bouman and Dr. Mark J. Lowe S. Chen Final Exam October
How to Compute the Pose of an Object without a Direct View?
 How to Compute the Pose of an Object without a Direct View? Peter Sturm and Thomas Bonfort INRIA Rhône-Alpes, 38330 Montbonnot St Martin, France {Peter.Sturm, Thomas.Bonfort}@inrialpes.fr Abstract. We
How to Compute the Pose of an Object without a Direct View? Peter Sturm and Thomas Bonfort INRIA Rhône-Alpes, 38330 Montbonnot St Martin, France {Peter.Sturm, Thomas.Bonfort}@inrialpes.fr Abstract. We
The Anatomical Equivalence Class Formulation and its Application to Shape-based Computational Neuroanatomy
 The Anatomical Equivalence Class Formulation and its Application to Shape-based Computational Neuroanatomy Sokratis K. Makrogiannis, PhD From post-doctoral research at SBIA lab, Department of Radiology,
The Anatomical Equivalence Class Formulation and its Application to Shape-based Computational Neuroanatomy Sokratis K. Makrogiannis, PhD From post-doctoral research at SBIA lab, Department of Radiology,
DEVELOPMENT OF ORIENTATION AND DEM/ORTHOIMAGE GENERATION PROGRAM FOR ALOS PRISM
 DEVELOPMENT OF ORIENTATION AND DEM/ORTHOIMAGE GENERATION PROGRAM FOR ALOS PRISM Izumi KAMIYA Geographical Survey Institute 1, Kitasato, Tsukuba 305-0811 Japan Tel: (81)-29-864-5944 Fax: (81)-29-864-2655
DEVELOPMENT OF ORIENTATION AND DEM/ORTHOIMAGE GENERATION PROGRAM FOR ALOS PRISM Izumi KAMIYA Geographical Survey Institute 1, Kitasato, Tsukuba 305-0811 Japan Tel: (81)-29-864-5944 Fax: (81)-29-864-2655
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
then assume that we are given the image of one of these textures captured by a camera at a different (longer) distance and with unknown direction of i
 distance and with unknown direction of i") Image Texture Prediction using Colour Photometric Stereo Xavier Lladó 1, Joan Mart 1, and Maria Petrou 2 1 Institute of Informatics and Applications, University of Girona, 1771, Girona, Spain fllado,joanmg@eia.udg.es
Image Texture Prediction using Colour Photometric Stereo Xavier Lladó 1, Joan Mart 1, and Maria Petrou 2 1 Institute of Informatics and Applications, University of Girona, 1771, Girona, Spain fllado,joanmg@eia.udg.es
L1 - Introduction. Contents. Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming
 L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the