Computational Photography
|
|
|
- Martin Sanders
- 6 years ago
- Views:
Transcription
1 Computational Photography Matthias Zwicker University of Bern Fall 2010
2 Today Light fields Introduction Light fields Signal processing analysis Light field cameras Application
3 Introduction Pinhole camera captures all light rays passing through one point
4 Introduction What if we could capture all light rays in a scene? Plenoptic function: information available to an observer at any point in space and time [Adelson, Bergen]
5 Plenoptic function Most general case: function of 7 variables Ray direction (2 degrees of freedom, dof ) Ray origin (3 dof) Wavelength (1 dof) Time 1 (dof) Value stored is radiance
6 Plenoptic function 2D image is a 2D slice of plenoptic function Perspective images: fix camera position, vary ray direction Other arrangements a e are possible Multi-viewpoint panoramas
7 Applications Panoramas Multi-viewpoint, spherical,... Image based rendering (free choice of viewpoint) Interactive walkthroughs Two panoramas from nearby viewpoints Two panoramas from nearby viewpoints



8 Applications Computing images using signal processing E.g., refocusing Depth extraction 2D slices of the plenoptic function Depth map
9 Applications Autostereoscopic 3D displays, no glasses Holografika (holographic projection screens) holografika Alioscopy (microlens arrays)




10 Capturing the plenoptic function Use many cameras at the same time /h h l Plenoptic camera
11 Today Light fields Introduction Light fields Signal processing analysis Light field cameras Application
12 Light fields Want to capture, process, display plenoptic function Need suitable representation to operate on Light fields based on two-plane parameterization
13 Two-plane parameterization Assumption: record light rays only outside convex hull of a scene Need only 2 dof for origin of light ray, since radiance along ray does not change Ray geometry has 4 dof instead of 5 dof Light fields are 4D functions Not recorded Convex hull Scene geometry Recorded ray
14 Two-plane parameterization Ray geometry represented by intersection location with two parallel planes Can interpret as 2 dof for origin, 2 dof for direction Each ray stores RGB radiance Levoy, Hanrahan, Light field rendering
15 Two-plane parameterization Uniform sampling: usually cameras on uniform grid on (u,v) plane Scene behind (s,t), plane Levoy, Hanrahan, Light field rendering


16 Acquiring light fields Sample directly on uniform grid v Each camera corresponds to one sample point on uv-plane Otherwise, resampling necessary u
17 Two-plane parameterization Uniform sampling on (u,v) and (s,t) plane Camera plane Camera plane Levoy, Hanrahan, Light field rendering
")

 plane, usually a few")
18 Two-plane parameterization Spatial resolution Resolution of each image Number of samples on (s,t) plane, usually a few million Camera plane Angular resolution Number of cameras, ( nr. of directions each scene point is seen from ) Number of samples on (u,v) plane, usually a few dozens to hundreds Camera plane
19 Light field rendering Given uniformly sampled light field Place camera arbitrarlily relative to parameterization planes Desired image consists of a set of rays through pixel centers Rendering requires interpolation In 4D, each ray given by 4 parameters Desired rays Levoy, Hanrahan, Light field rendering
20 Interpolation (2D illustration) st st st uv uv uv Virtual camera ray Virtual camera ray Virtual camera ray Nearest neighbor uv bilinear uvst quadrilinear
21 Today Light fields Introduction Light fields Signal processing analysis Light field cameras Application
22 Signal processing analysis Want to understand sampling, reconstruction, aliasing of light fields similar as for 2D images Benefits Antialiasing i algorithms High quality filters Efficient algorithms Chai et al Plenoptic sampling Chai et al., Plenoptic sampling
23 Ray space (2D illustration) A ray is a point in ray space Origin of v relative to t Ray 0 0 Two plane parameterization Ray space Caution: different arrangements occur in literature!
24 Ray space All rays through a point form a line in ray space Slope inversely related to depth Two plane parameterization Ray space Point towards infinity: slope becomes horizontal Point on v-axis: slope is diagonal




25 Ray space Scene with constant depth forms a sheared structure in ray space Two plane parameterization Ray space
26 Ray space Visualize ray space of one scanline v Moving viewpoint Scanline Scene with several depth layers Ray space, epipolar plane image, EPI t



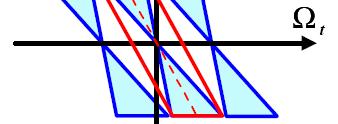
27 Fourier analysis Fourier transform Ray space Light field spectrum





28 Fourier analysis Scenes with bounded depth range v Zero power EPI of one scanline t Zero power Light field spectrum, bow tie
29 Fourier analysis v Scene with several depth layers Ray space t Fourier transform
30 Sampling and reconstruction Continuous reconstruction allows interpolation Rendering of new views Before: quadrilinear interpolation/reconstruction Can we do better? Desired rays st uv uvst quadrilinear reconstruction filter
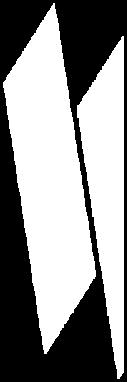
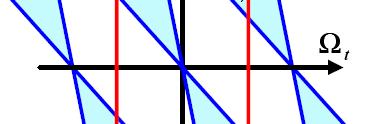
31 Sampling and reconstruction Sampling leads to replication of spectra Reconstruction is multiplication with filter spectrum Overlap with non-central replicas is aliasing (Idealized) spectrum of reconstruction filter Reconstruction with aliasing Aliasing appears as double edges
32 Sampling and reconstruction Sheared reconstruction filter to match depth of scene allows lower sampling rate Higher sampling rate isotropic i reconstruction ti filter, aliasing Lower sampling rate, optimal reconstruction ti filter, no aliasing



33 Sheared reconstruction No aliasing at lower sampling rate
34 Sheared reconstruction Shearing reconstruction filter equivalent to shearing signal before filtering Visualization using 3D light field example Only horizontal camera movement 3D light field interpreted as image stack







35 Sheared reconstruction Input Reconstruction: filtering across images Shear determines which depth is aligned with filter






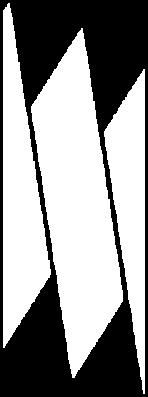
36 Filter visualization No shearing, high bandwidth in t and v Aliasing, as before
")
37 Filter visualization Sheared, high bandwidth in t and v No(or reduced) aliasing






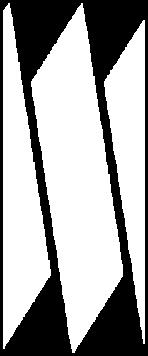
38 Filter visualization Sheared, low bandwidth in t (angle) Large synthetic aperture












39 Synthetic aperture Small synthetic aperture Large synthetic aperture



40 Synthetic aperture The scene depth aligned with sheared filter is sharp, in focus Can choose focus arbitrarily by varying shear! Size of filter determines es depth of field Adjusting shear of large synthetic aperture filter to change focus


41 Filter visualization Sheared, low bandwidth in t and v Blurry images






42 Note Shearing the filter and shearing the signal is equivalent Sheared filter Sheared signal



43 Observation Often, light fields are undersampled, or aliased Limited it number of viewpoints i Sheared reconstruction may still be aliased! Aliasing, overlap of reconstruction filter with replicas Aliasing, double images
44 Reconstruction without aliasing Avoid aliasing by reducing spatial or angular bandwidth Low spatial bandwidth, blurry image Low angular bandwidth (wide aperture), shallow depth of field




45 Reconstruction without aliasing Low spatial bandwidth, blurry image Low angular bandwidth, shallow depth of field
46 Improved reconstruction Construct reconstruction filter that preserves as much of signal as possible Improved reconstruction for undersampled (aliased) light fields Improved reconstruction for undersampled (aliased) light fields
47 Improved reconstruction Blurring (low-pass filtering) images separately Low bandwidth in v Large aperture filter Low bandwidth in t Large aperture filtering and blurring * = Order doesn t matter
48 Improved reconstruction Frequency domain construction - * = = + =
49 Spatial domain implementation 1. Wide aperture filtering on original input images 2. Compute set of blurred input images 3. Wide aperture filter of blurred images 4. Subtract result of 3 from 1 5. Add result of 4 to 2 In practice filters implemented eg In practice, filters implemented e.g. using Gaussians



50 Improved reconstruction Blurry Large aperture Improved reconstruction ti reconstruction ti reconstruction ti
51 Today Light fields Introduction Light fields Signal processing analysis Light field cameras Application
52 Light field cameras Already described by Lipman, 1908 Using microlens array pdf Similar construction by Adelson & Wang, 1992 For depth reconstruction




53 Light field cameras Camera arrays
54 Light field cameras Robotic cameras Restricted to static scenes
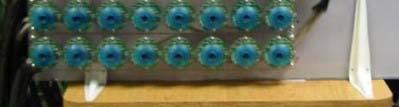
55 Light field cameras Hand-held cameras Microlens array mounted on top of camera sensor Commercial product t / Camera with microlens array
56 Light field cameras Hand-held cameras Sensor pixels Scene point Each sensor pixel of a microlens observes es scene point from slightly different viewpoint Viewpoints distributed over aperture of main lens Viewpoints distributed over aperture of main lens Other arrangements possible
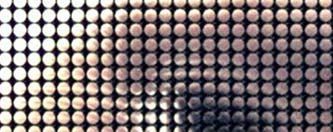
57 Light field cameras Sensor data Close-up


58 Light field cameras
59 Today Light fields Introduction Light fields Signal processing analysis Light field cameras Application
60 Digital refocusing Change focus of image after capture
61 Digital refocusing Change focus of image after capture
62 Digital refocusing As before: adjust shear of reconstruction filter Shear determines focusing distance But careful, different parameterization Now: ray tracing explanation
63 Digital refocusing
64 Digital refocusing
65 Digital refocusing
66 Digital refocusing
67 3D displays Displays that show light fields Use view dependent pixels Pixels show dff different color dependingd on viewing angle Autostereoscopic viewing: left and right eyes see different color at each pixel No glasses! Spatial resolution: how many pixels Angular resolution: how many direction per pixel View dependent pixels Left eye Right eye
68 Integral imaging First 3D autostereoscopc displays [Lippmann 1908] Ui Using lenticular l optics Eachlensisa viewdependent pixel Same two-plane parameterization to describe rays (u,v) (s,t) (u,v) (s,t)
 Lens array Encoded light field without lenticular sheet Image from certain viewing")
69 Integral imaging Place image that encodes light field data behind lenticular sheet (lens array) Lens array Encoded light field without lenticular sheet Image from certain viewing postion
70 Parallax barriers Same concept as lenticulars, different implementation Two-plane parameterization to describe rays (s,t) (u,v)
71 Limitations & outlook Parallax barriers & lenticulars suffer from poor resolution Low angular resolution: only few (<10) directional (angular) samples per pixel Aliasing las problems, poble ghosting g Holographic screens Higher angular resolution Maybe this is the future? See
72 Summary Plenoptic function: theoretical concept that captures complete information of light distribution in a scene Light fields: practical representation of plenoptic function restricted to 4D Two plane parameterization Convenient to capture, process Signal processing analysis, bow tie spectrum Sheared reconstruction, synthetic aperture filters Light field cameras Camera arrays, hand-held camera Applications Rendering images from novel viewpoints After the fact processing for photography, refocusing Other processing, depth extraction 3D displays
73 Next time From 2D images to 3D geometry
Modeling Light. Michal Havlik : Computational Photography Alexei Efros, CMU, Fall 2007
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Plenoptic Function Figure by Leonard McMillan Q: What is the set of all things that we can ever see? A: The
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Plenoptic Function Figure by Leonard McMillan Q: What is the set of all things that we can ever see? A: The
Modeling Light. Slides from Alexei A. Efros and others
 Project 3 Results http://www.cs.brown.edu/courses/cs129/results/proj3/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj3/damoreno/ http://www.cs.brown.edu/courses/cs129/results/proj3/taox/ Stereo
Project 3 Results http://www.cs.brown.edu/courses/cs129/results/proj3/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj3/damoreno/ http://www.cs.brown.edu/courses/cs129/results/proj3/taox/ Stereo
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-based modeling (IBM) and image-based rendering (IBR)
 and image-based rendering (IBR)") Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Modeling Light. Michal Havlik
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 What is light? Electromagnetic radiation (EMR) moving along rays in space R( ) is EMR, measured in units of
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 What is light? Electromagnetic radiation (EMR) moving along rays in space R( ) is EMR, measured in units of
Plenoptic camera and its Applications
 Aum Sri Sairam Plenoptic camera and its Applications Agenda: 1. Introduction 2. Single lens stereo design 3. Plenoptic camera design 4. Depth estimation 5. Synthetic refocusing 6. Fourier slicing 7. References
Aum Sri Sairam Plenoptic camera and its Applications Agenda: 1. Introduction 2. Single lens stereo design 3. Plenoptic camera design 4. Depth estimation 5. Synthetic refocusing 6. Fourier slicing 7. References
Modeling Light. Michal Havlik : Computational Photography Alexei Efros, CMU, Fall 2011
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
The Focused Plenoptic Camera. Lightfield photographers, focus your cameras! Karl Marx
 The Focused Plenoptic Camera Lightfield photographers, focus your cameras! Karl Marx Plenoptic Camera, Adelson 1992 Main lens focused on microlenses Plenoptic Camera, Adelson 1992 Microlenses focused on
The Focused Plenoptic Camera Lightfield photographers, focus your cameras! Karl Marx Plenoptic Camera, Adelson 1992 Main lens focused on microlenses Plenoptic Camera, Adelson 1992 Microlenses focused on
Jingyi Yu CISC 849. Department of Computer and Information Science
 Digital Photography and Videos Jingyi Yu CISC 849 Light Fields, Lumigraph, and Image-based Rendering Pinhole Camera A camera captures a set of rays A pinhole camera captures a set of rays passing through
Digital Photography and Videos Jingyi Yu CISC 849 Light Fields, Lumigraph, and Image-based Rendering Pinhole Camera A camera captures a set of rays A pinhole camera captures a set of rays passing through
Modeling Light. Michal Havlik
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
Modeling Light. On Simulating the Visual Experience
 Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
Focal stacks and lightfields
 Focal stacks and lightfields http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 11 Course announcements Homework 3 is out. - Due October 12 th.
Focal stacks and lightfields http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 11 Course announcements Homework 3 is out. - Due October 12 th.
More and More on Light Fields. Last Lecture
 More and More on Light Fields Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 4 Last Lecture Re-review with emphasis on radiometry Mosaics & Quicktime VR The Plenoptic function The main
More and More on Light Fields Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 4 Last Lecture Re-review with emphasis on radiometry Mosaics & Quicktime VR The Plenoptic function The main
Image or Object? Is this real?
 Image or Object? Michael F. Cohen Microsoft Is this real? Photo by Patrick Jennings (patrick@synaptic.bc.ca), Copyright 1995, 96, 97 Whistler B. C. Canada Modeling, Rendering, and Lighting 1 A mental model?
Image or Object? Michael F. Cohen Microsoft Is this real? Photo by Patrick Jennings (patrick@synaptic.bc.ca), Copyright 1995, 96, 97 Whistler B. C. Canada Modeling, Rendering, and Lighting 1 A mental model?
Light Fields. Johns Hopkins Department of Computer Science Course : Rendering Techniques, Professor: Jonathan Cohen
 Light Fields Light Fields By Levoy and Hanrahan, SIGGRAPH 96 Representation for sampled plenoptic function stores data about visible light at various positions and directions Created from set of images
Light Fields Light Fields By Levoy and Hanrahan, SIGGRAPH 96 Representation for sampled plenoptic function stores data about visible light at various positions and directions Created from set of images
Light Field Spring
 Light Field 2015 Spring Recall: Light is Electromagnetic radiation (EMR) moving along rays in space R(l) is EMR, measured in units of power (watts) l is wavelength Useful things: Light travels in straight
Light Field 2015 Spring Recall: Light is Electromagnetic radiation (EMR) moving along rays in space R(l) is EMR, measured in units of power (watts) l is wavelength Useful things: Light travels in straight
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Radiance Photography. Todor Georgiev Adobe Systems. Andrew Lumsdaine Indiana University
 Radiance Photography Todor Georgiev Adobe Systems Andrew Lumsdaine Indiana University Course Goals Overview of radiance (aka lightfield) photography Mathematical treatment of theory and computation Hands
Radiance Photography Todor Georgiev Adobe Systems Andrew Lumsdaine Indiana University Course Goals Overview of radiance (aka lightfield) photography Mathematical treatment of theory and computation Hands
AS the most important medium for people to perceive
 JOURNAL OF L A T E X CLASS FILES, VOL. XX, NO. X, OCTOBER 2017 1 Light Field Image Processing: An Overview Gaochang Wu, Belen Masia, Adrian Jarabo, Yuchen Zhang, Liangyong Wang, Qionghai Dai, Senior Member,
JOURNAL OF L A T E X CLASS FILES, VOL. XX, NO. X, OCTOBER 2017 1 Light Field Image Processing: An Overview Gaochang Wu, Belen Masia, Adrian Jarabo, Yuchen Zhang, Liangyong Wang, Qionghai Dai, Senior Member,
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India
 A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
VIDEO FOR VIRTUAL REALITY LIGHT FIELD BASICS JAMES TOMPKIN
 VIDEO FOR VIRTUAL REALITY LIGHT FIELD BASICS JAMES TOMPKIN WHAT IS A LIGHT FIELD? Light field seems to have turned into a catch-all term for many advanced camera/display technologies. WHAT IS A LIGHT FIELD?
VIDEO FOR VIRTUAL REALITY LIGHT FIELD BASICS JAMES TOMPKIN WHAT IS A LIGHT FIELD? Light field seems to have turned into a catch-all term for many advanced camera/display technologies. WHAT IS A LIGHT FIELD?
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images
 Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Image-Based Modeling and Rendering
 Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Multi-View Omni-Directional Imaging
 Multi-View Omni-Directional Imaging Tuesday, December 19, 2000 Moshe Ben-Ezra, Shmuel Peleg Abstract This paper describes a novel camera design or the creation o multiple panoramic images, such that each
Multi-View Omni-Directional Imaging Tuesday, December 19, 2000 Moshe Ben-Ezra, Shmuel Peleg Abstract This paper describes a novel camera design or the creation o multiple panoramic images, such that each
Distribution Ray-Tracing. Programação 3D Simulação e Jogos
 Distribution Ray-Tracing Programação 3D Simulação e Jogos Bibliography K. Suffern; Ray Tracing from the Ground Up, http://www.raytracegroundup.com Chapter 4, 5 for Anti-Aliasing Chapter 6 for Disc Sampling
Distribution Ray-Tracing Programação 3D Simulação e Jogos Bibliography K. Suffern; Ray Tracing from the Ground Up, http://www.raytracegroundup.com Chapter 4, 5 for Anti-Aliasing Chapter 6 for Disc Sampling
Computational Photography
 Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
A Frequency Analysis of Light Transport
 A Frequency Analysis of Light Transport Frédo Durand MIT CSAIL With Nicolas Holzschuch, Cyril Soler, Eric Chan & Francois Sillion Artis Gravir/Imag-Inria & MIT CSAIL Our research 3D rendering Light transport
A Frequency Analysis of Light Transport Frédo Durand MIT CSAIL With Nicolas Holzschuch, Cyril Soler, Eric Chan & Francois Sillion Artis Gravir/Imag-Inria & MIT CSAIL Our research 3D rendering Light transport
AN O(N 2 LOG(N)) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM
) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM") AN O(N 2 LOG(N)) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM Fernando Pérez Nava +, Jonás Philipp Lüke + Departamento de Estadística, Investigación Operativa y Computación Departamento de Física Fundamental
AN O(N 2 LOG(N)) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM Fernando Pérez Nava +, Jonás Philipp Lüke + Departamento de Estadística, Investigación Operativa y Computación Departamento de Física Fundamental
The Light Field and Image-Based Rendering
 Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Computational Methods for Radiance. Render the full variety offered by the direct observation of objects. (Computationally).
.") Computational Methods for Radiance Render the full variety offered by the direct observation of objects. (Computationally). Methods for Plenoptic 1.0 Computing with Radiance Goal: Render the full variety
Computational Methods for Radiance Render the full variety offered by the direct observation of objects. (Computationally). Methods for Plenoptic 1.0 Computing with Radiance Goal: Render the full variety
Structure from Motion and Multi- view Geometry. Last lecture
 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography
 Mitsubishi Electric Research Labs (MERL) Computational Cameras Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography Amit Agrawal Mitsubishi Electric Research Labs (MERL)
Mitsubishi Electric Research Labs (MERL) Computational Cameras Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography Amit Agrawal Mitsubishi Electric Research Labs (MERL)
Computational Photography: Real Time Plenoptic Rendering
 Computational Photography: Real Time Plenoptic Rendering Andrew Lumsdaine, Georgi Chunev Indiana University Todor Georgiev Adobe Systems Who was at the Keynote Yesterday? 2 Overview Plenoptic cameras Rendering
Computational Photography: Real Time Plenoptic Rendering Andrew Lumsdaine, Georgi Chunev Indiana University Todor Georgiev Adobe Systems Who was at the Keynote Yesterday? 2 Overview Plenoptic cameras Rendering
Lecture 15: Image-Based Rendering and the Light Field. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
But, vision technology falls short. and so does graphics. Image Based Rendering. Ray. Constant radiance. time is fixed. 3D position 2D direction
 Computer Graphics -based rendering Output Michael F. Cohen Microsoft Research Synthetic Camera Model Computer Vision Combined Output Output Model Real Scene Synthetic Camera Model Real Cameras Real Scene
Computer Graphics -based rendering Output Michael F. Cohen Microsoft Research Synthetic Camera Model Computer Vision Combined Output Output Model Real Scene Synthetic Camera Model Real Cameras Real Scene
Dense Lightfield Disparity Estimation using Total Variation Regularization
 Dense Lightfield Disparity Estimation using Total Variation Regularization Nuno Barroso Monteiro 1,2, João Pedro Barreto 2, and José Gaspar 1 1 Institute for Systems and Robotics, Univ. of Lisbon, Portugal
Dense Lightfield Disparity Estimation using Total Variation Regularization Nuno Barroso Monteiro 1,2, João Pedro Barreto 2, and José Gaspar 1 1 Institute for Systems and Robotics, Univ. of Lisbon, Portugal
Plenoptic Cameras. Bastian Goldlücke, Oliver Klehm, Sven Wanner, and Elmar Eisemann. 5.1 Introduction
 Plenoptic Cameras Bastian Goldlücke, Oliver Klehm, Sven Wanner, and Elmar Eisemann 5.1 Introduction The light field, as defined by Gershun in 1936 [Gershun 36] describes the radiance traveling in every
Plenoptic Cameras Bastian Goldlücke, Oliver Klehm, Sven Wanner, and Elmar Eisemann 5.1 Introduction The light field, as defined by Gershun in 1936 [Gershun 36] describes the radiance traveling in every
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Announcements. Mosaics. Image Mosaics. How to do it? Basic Procedure Take a sequence of images from the same position =
 Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
L16. Scan Matching and Image Formation
 EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
GPU assisted light field capture and processing
 GPU assisted light field capture and processing Attila Barsi Holografika GPU Day, Budapest, 22. 06. 2017. What is this all about? Ninjas! Motivation: ninjas are cool, and can do lots of tricks that we
GPU assisted light field capture and processing Attila Barsi Holografika GPU Day, Budapest, 22. 06. 2017. What is this all about? Ninjas! Motivation: ninjas are cool, and can do lots of tricks that we
Coding and Modulation in Cameras
 Mitsubishi Electric Research Laboratories Raskar 2007 Coding and Modulation in Cameras Ramesh Raskar with Ashok Veeraraghavan, Amit Agrawal, Jack Tumblin, Ankit Mohan Mitsubishi Electric Research Labs
Mitsubishi Electric Research Laboratories Raskar 2007 Coding and Modulation in Cameras Ramesh Raskar with Ashok Veeraraghavan, Amit Agrawal, Jack Tumblin, Ankit Mohan Mitsubishi Electric Research Labs
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Computer Graphics. Texture Filtering & Sampling Theory. Hendrik Lensch. Computer Graphics WS07/08 Texturing
 Computer Graphics Texture Filtering & Sampling Theory Hendrik Lensch Overview Last time Texture Parameterization Procedural Shading Today Texturing Filtering 2D Texture Mapping Forward mapping Object surface
Computer Graphics Texture Filtering & Sampling Theory Hendrik Lensch Overview Last time Texture Parameterization Procedural Shading Today Texturing Filtering 2D Texture Mapping Forward mapping Object surface
Optimization of the number of rays in interpolation for light field based free viewpoint systems
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2015 Optimization of the number of rays in for
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2015 Optimization of the number of rays in for
Title: The Future of Photography is Computational Photography. Subtitle: 100 years after invention, Integral Photography becomes feasible
 Title: The Future of Photography is Computational Photography Subtitle: 100 years after invention, Integral Photography becomes feasible Adobe customers are creative and demanding. They expect to use our
Title: The Future of Photography is Computational Photography Subtitle: 100 years after invention, Integral Photography becomes feasible Adobe customers are creative and demanding. They expect to use our
TREE-STRUCTURED ALGORITHM FOR EFFICIENT SHEARLET-DOMAIN LIGHT FIELD RECONSTRUCTION. Suren Vagharshakyan, Robert Bregovic, Atanas Gotchev
 TREE-STRUCTURED ALGORITHM FOR EFFICIENT SHEARLET-DOMAIN LIGHT FIELD RECONSTRUCTION Suren Vagharshakyan, Robert Bregovic, Atanas Gotchev Department of Signal Processing, Tampere University of Technology,
TREE-STRUCTURED ALGORITHM FOR EFFICIENT SHEARLET-DOMAIN LIGHT FIELD RECONSTRUCTION Suren Vagharshakyan, Robert Bregovic, Atanas Gotchev Department of Signal Processing, Tampere University of Technology,
Linearizing the Plenoptic Space
 Linearizing the Plenoptic Space Grégoire Nieto1, Frédéric Devernay1, James Crowley2 LJK, Université Grenoble Alpes, France 2 LIG, Université Grenoble Alpes, France 1 1 Goal: synthesize a new view Capture/sample
Linearizing the Plenoptic Space Grégoire Nieto1, Frédéric Devernay1, James Crowley2 LJK, Université Grenoble Alpes, France 2 LIG, Université Grenoble Alpes, France 1 1 Goal: synthesize a new view Capture/sample
An Approach on Hardware Design for Computationally Intensive Image Processing Applications based on Light Field Refocusing Algorithm
 An Approach on Hardware Design for Computationally Intensive Image Processing Applications based on Light Field Refocusing Algorithm Jiayuan Meng, Dee A.B. Weikle, Greg Humphreys, Kevin Skadron Dept. of
An Approach on Hardware Design for Computationally Intensive Image Processing Applications based on Light Field Refocusing Algorithm Jiayuan Meng, Dee A.B. Weikle, Greg Humphreys, Kevin Skadron Dept. of
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Theoretically Perfect Sensor
 Sampling 1/60 Sampling The ray tracer samples the geometry, only gathering information from the parts of the world that interact with a finite number of rays In contrast, a scanline renderer can push all
Sampling 1/60 Sampling The ray tracer samples the geometry, only gathering information from the parts of the world that interact with a finite number of rays In contrast, a scanline renderer can push all
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
EECS 487: Interactive Computer Graphics
 Ray Tracing EECS 487: Interactive Computer Graphics Lecture 29: Distributed Ray Tracing Introduction and context ray casting Recursive ray tracing shadows reflection refraction Ray tracing implementation
Ray Tracing EECS 487: Interactive Computer Graphics Lecture 29: Distributed Ray Tracing Introduction and context ray casting Recursive ray tracing shadows reflection refraction Ray tracing implementation
IRW: An Incremental Representation for Image-Based Walkthroughs
 IRW: An Incremental Representation for Image-Based Walkthroughs David Gotz gotz@cs.unc.edu Ketan Mayer-Patel kmp@cs.unc.edu University of North Carolina at Chapel Hill CB #3175, Sitterson Hall Chapel Hill,
IRW: An Incremental Representation for Image-Based Walkthroughs David Gotz gotz@cs.unc.edu Ketan Mayer-Patel kmp@cs.unc.edu University of North Carolina at Chapel Hill CB #3175, Sitterson Hall Chapel Hill,
distribution ray-tracing
 distribution ray-tracing 1 distribution ray-tracing use many rays to compute average values over pixel areas, time, area lights, reflected directions,... 2 antialiasing origin compute average color subtended
distribution ray-tracing 1 distribution ray-tracing use many rays to compute average values over pixel areas, time, area lights, reflected directions,... 2 antialiasing origin compute average color subtended
 http://www.diva-portal.org This is the published version of a paper presented at 2018 3DTV Conference: The True Vision - Capture, Transmission and Display of 3D Video (3DTV-CON), Stockholm Helsinki Stockholm,
http://www.diva-portal.org This is the published version of a paper presented at 2018 3DTV Conference: The True Vision - Capture, Transmission and Display of 3D Video (3DTV-CON), Stockholm Helsinki Stockholm,
Today. Global illumination. Shading. Interactive applications. Rendering pipeline. Computergrafik. Shading Introduction Local shading models
 Computergrafik Matthias Zwicker Universität Bern Herbst 2009 Today Introduction Local shading models Light sources strategies Compute interaction of light with surfaces Requires simulation of physics Global
Computergrafik Matthias Zwicker Universität Bern Herbst 2009 Today Introduction Local shading models Light sources strategies Compute interaction of light with surfaces Requires simulation of physics Global
A Warping-based Refinement of Lumigraphs
 A Warping-based Refinement of Lumigraphs Wolfgang Heidrich, Hartmut Schirmacher, Hendrik Kück, Hans-Peter Seidel Computer Graphics Group University of Erlangen heidrich,schirmacher,hkkueck,seidel@immd9.informatik.uni-erlangen.de
A Warping-based Refinement of Lumigraphs Wolfgang Heidrich, Hartmut Schirmacher, Hendrik Kück, Hans-Peter Seidel Computer Graphics Group University of Erlangen heidrich,schirmacher,hkkueck,seidel@immd9.informatik.uni-erlangen.de
Light Field Techniques for Reflections and Refractions
 Light Field Techniques for Reflections and Refractions Wolfgang Heidrich, Hendrik Lensch, Michael F. Cohen, Hans-Peter Seidel Max-Planck-Institute for Computer Science {heidrich,lensch,seidel}@mpi-sb.mpg.de
Light Field Techniques for Reflections and Refractions Wolfgang Heidrich, Hendrik Lensch, Michael F. Cohen, Hans-Peter Seidel Max-Planck-Institute for Computer Science {heidrich,lensch,seidel}@mpi-sb.mpg.de
Advanced Computer Graphics Transformations. Matthias Teschner
 Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Announcements. Mosaics. How to do it? Image Mosaics
 Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Multi-Camera Plenoptic Particle Image Velocimetry
 1TH INTERNATIONAL SYMPOSIUM ON PARTICLE IMAGE VELOCIMETRY PIV13 Delft The Netherlands July 24 213 MultiCamera Plenoptic Particle Image Velocimetry Roderick R. La Foy 1 and Pavlos Vlachos 2 1 Department
1TH INTERNATIONAL SYMPOSIUM ON PARTICLE IMAGE VELOCIMETRY PIV13 Delft The Netherlands July 24 213 MultiCamera Plenoptic Particle Image Velocimetry Roderick R. La Foy 1 and Pavlos Vlachos 2 1 Department
CS201 Computer Vision Lect 4 - Image Formation
 CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
L1a: Introduction to Light Fields
 L1a: Introduction to Light Fields 2018 IEEE SPS Summer School on Light Field Data Representation, Interpretation, and Compression Donald G. Dansereau, May 2018 Schedule 2 Outline Lecture 1a: Introduction
L1a: Introduction to Light Fields 2018 IEEE SPS Summer School on Light Field Data Representation, Interpretation, and Compression Donald G. Dansereau, May 2018 Schedule 2 Outline Lecture 1a: Introduction
A unified approach for motion analysis and view synthesis Λ
 A unified approach for motion analysis and view synthesis Λ Alex Rav-Acha Shmuel Peleg School of Computer Science and Engineering The Hebrew University of Jerusalem 994 Jerusalem, Israel Email: falexis,pelegg@cs.huji.ac.il
A unified approach for motion analysis and view synthesis Λ Alex Rav-Acha Shmuel Peleg School of Computer Science and Engineering The Hebrew University of Jerusalem 994 Jerusalem, Israel Email: falexis,pelegg@cs.huji.ac.il
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
CS 563 Advanced Topics in Computer Graphics Camera Models. by Kevin Kardian
 CS 563 Advanced Topics in Computer Graphics Camera Models by Kevin Kardian Introduction Pinhole camera is insufficient Everything in perfect focus Less realistic Different camera models are possible Create
CS 563 Advanced Topics in Computer Graphics Camera Models by Kevin Kardian Introduction Pinhole camera is insufficient Everything in perfect focus Less realistic Different camera models are possible Create
Light Field Super Resolution with Convolutional Neural Networks
 Light Field Super Resolution with Convolutional Neural Networks by Andrew Hou A Thesis submitted in partial fulfillment of the requirements for Honors in the Department of Applied Mathematics and Computer
Light Field Super Resolution with Convolutional Neural Networks by Andrew Hou A Thesis submitted in partial fulfillment of the requirements for Honors in the Department of Applied Mathematics and Computer
Rendering: Reality. Eye acts as pinhole camera. Photons from light hit objects
 Basic Ray Tracing Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as
Basic Ray Tracing Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as
Sampling and Reconstruction
 Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Computergrafik. Matthias Zwicker Universität Bern Herbst 2016
 Computergrafik Matthias Zwicker Universität Bern Herbst 2016 2 Today Basic shader for texture mapping Texture coordinate assignment Antialiasing Fancy textures 3 Texture mapping Glue textures (images)
Computergrafik Matthias Zwicker Universität Bern Herbst 2016 2 Today Basic shader for texture mapping Texture coordinate assignment Antialiasing Fancy textures 3 Texture mapping Glue textures (images)
CSCI 1290: Comp Photo
 CSCI 1290: Comp Photo Fall 2018 @ Brown University James Tompkin Many slides thanks to James Hays old CS 129 course, along with all of its acknowledgements. What do we see? 3D world 2D image Point of observation
CSCI 1290: Comp Photo Fall 2018 @ Brown University James Tompkin Many slides thanks to James Hays old CS 129 course, along with all of its acknowledgements. What do we see? 3D world 2D image Point of observation
Ray Tracing. CS334 Fall Daniel G. Aliaga Department of Computer Science Purdue University
 Ray Tracing CS334 Fall 2013 Daniel G. Aliaga Department of Computer Science Purdue University Ray Casting and Ray Tracing Ray Casting Arthur Appel, started around 1968 Ray Tracing Turner Whitted, started
Ray Tracing CS334 Fall 2013 Daniel G. Aliaga Department of Computer Science Purdue University Ray Casting and Ray Tracing Ray Casting Arthur Appel, started around 1968 Ray Tracing Turner Whitted, started
High-Quality Interactive Lumigraph Rendering Through Warping
 High-Quality Interactive Lumigraph Rendering Through Warping Hartmut Schirmacher, Wolfgang Heidrich, and Hans-Peter Seidel Max-Planck-Institut für Informatik Saarbrücken, Germany http://www.mpi-sb.mpg.de
High-Quality Interactive Lumigraph Rendering Through Warping Hartmut Schirmacher, Wolfgang Heidrich, and Hans-Peter Seidel Max-Planck-Institut für Informatik Saarbrücken, Germany http://www.mpi-sb.mpg.de
Image Base Rendering: An Introduction
 Image Base Rendering: An Introduction Cliff Lindsay CS563 Spring 03, WPI 1. Introduction Up to this point, we have focused on showing 3D objects in the form of polygons. This is not the only approach to
Image Base Rendering: An Introduction Cliff Lindsay CS563 Spring 03, WPI 1. Introduction Up to this point, we have focused on showing 3D objects in the form of polygons. This is not the only approach to
distribution ray tracing
 distribution ray tracing computer graphics distribution ray tracing 2006 fabio pellacini 1 distribution ray tracing use many rays to compute average values over pixel areas, time, area lights, reflected
distribution ray tracing computer graphics distribution ray tracing 2006 fabio pellacini 1 distribution ray tracing use many rays to compute average values over pixel areas, time, area lights, reflected
Computer Vision I - Image Matching and Image Formation
 Computer Vision I - Image Matching and Image Formation Carsten Rother 10/12/2014 Computer Vision I: Image Formation Process Computer Vision I: Image Formation Process 10/12/2014 2 Roadmap for next five
Computer Vision I - Image Matching and Image Formation Carsten Rother 10/12/2014 Computer Vision I: Image Formation Process Computer Vision I: Image Formation Process 10/12/2014 2 Roadmap for next five
Theoretically Perfect Sensor
 Sampling 1/67 Sampling The ray tracer samples the geometry, only gathering information from the parts of the world that interact with a finite number of rays In contrast, a scanline renderer can push all
Sampling 1/67 Sampling The ray tracer samples the geometry, only gathering information from the parts of the world that interact with a finite number of rays In contrast, a scanline renderer can push all
3D Surface Reconstruction Based On Plenoptic Image. Haiqiao Zhang
 3D Surface Reconstruction Based On Plenoptic Image by Haiqiao Zhang A thesis submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements for the Degree of Master of
3D Surface Reconstruction Based On Plenoptic Image by Haiqiao Zhang A thesis submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements for the Degree of Master of
Depth Estimation of Semi-submerged Objects Using a Light Field Camera. Juehui Fan
 Depth Estimation of Semi-submerged Objects Using a Light Field Camera by Juehui Fan A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department of Computing
Depth Estimation of Semi-submerged Objects Using a Light Field Camera by Juehui Fan A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department of Computing
Programming projects. Assignment 1: Basic ray tracer. Assignment 1: Basic ray tracer. Assignment 1: Basic ray tracer. Assignment 1: Basic ray tracer
 Programming projects Rendering Algorithms Spring 2010 Matthias Zwicker Universität Bern Description of assignments on class webpage Use programming language and environment of your choice We recommend
Programming projects Rendering Algorithms Spring 2010 Matthias Zwicker Universität Bern Description of assignments on class webpage Use programming language and environment of your choice We recommend
3D Volume Reconstruction From 2D Plenoptic Data Using FFT-Based Methods. John Paul Anglin
 3D Volume Reconstruction From 2D Plenoptic Data Using FFT-Based Methods by John Paul Anglin A dissertation submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements
3D Volume Reconstruction From 2D Plenoptic Data Using FFT-Based Methods by John Paul Anglin A dissertation submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements
Image Transfer Methods. Satya Prakash Mallick Jan 28 th, 2003
 Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
WATERMARKING FOR LIGHT FIELD RENDERING 1
 ATERMARKING FOR LIGHT FIELD RENDERING 1 Alper Koz, Cevahir Çığla and A. Aydın Alatan Department of Electrical and Electronics Engineering, METU Balgat, 06531, Ankara, TURKEY. e-mail: koz@metu.edu.tr, cevahir@eee.metu.edu.tr,
ATERMARKING FOR LIGHT FIELD RENDERING 1 Alper Koz, Cevahir Çığla and A. Aydın Alatan Department of Electrical and Electronics Engineering, METU Balgat, 06531, Ankara, TURKEY. e-mail: koz@metu.edu.tr, cevahir@eee.metu.edu.tr,
Today. Texture mapping in OpenGL. Texture mapping. Basic shaders for texturing. Today. Computergrafik
 Computergrafik Today Basic shader for texture mapping Texture coordinate assignment Antialiasing Fancy textures Matthias Zwicker Universität Bern Herbst 2009 Texture mapping Glue textures (images) onto
Computergrafik Today Basic shader for texture mapping Texture coordinate assignment Antialiasing Fancy textures Matthias Zwicker Universität Bern Herbst 2009 Texture mapping Glue textures (images) onto
Rendering. Converting a 3D scene to a 2D image. Camera. Light. Rendering. View Plane
 Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Light Field Rendering
 Light Field Rendering Marc Levo y and Pat Hanrahan Computer Science Department Stanford University Abstract A number of techniques have been proposed for flying through scenes by redisplaying previously
Light Field Rendering Marc Levo y and Pat Hanrahan Computer Science Department Stanford University Abstract A number of techniques have been proposed for flying through scenes by redisplaying previously
Realistic Camera Model
 Realistic Camera Model Shan-Yung Yang November 2, 2006 Shan-Yung Yang () Realistic Camera Model November 2, 2006 1 / 25 Outline Introduction Lens system Thick lens approximation Radiometry Sampling Assignment
Realistic Camera Model Shan-Yung Yang November 2, 2006 Shan-Yung Yang () Realistic Camera Model November 2, 2006 1 / 25 Outline Introduction Lens system Thick lens approximation Radiometry Sampling Assignment
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Computer Graphics. Lecture 9 Environment mapping, Mirroring
 Computer Graphics Lecture 9 Environment mapping, Mirroring Today Environment Mapping Introduction Cubic mapping Sphere mapping refractive mapping Mirroring Introduction reflection first stencil buffer
Computer Graphics Lecture 9 Environment mapping, Mirroring Today Environment Mapping Introduction Cubic mapping Sphere mapping refractive mapping Mirroring Introduction reflection first stencil buffer
Computer Vision for Computer Graphics
 Computer Vision for Computer Graphics Mark Borg Computer Vision & Computer Graphics I Computer Vision Understanding the content of an image (normaly by creating a model of the observed scene) Computer
Computer Vision for Computer Graphics Mark Borg Computer Vision & Computer Graphics I Computer Vision Understanding the content of an image (normaly by creating a model of the observed scene) Computer
Hybrid Rendering for Collaborative, Immersive Virtual Environments
 Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Ray Tracing III. Wen-Chieh (Steve) Lin National Chiao-Tung University
 Lin National Chiao-Tung University") Ray Tracing III Wen-Chieh (Steve) Lin National Chiao-Tung University Shirley, Fundamentals of Computer Graphics, Chap 10 Doug James CG slides, I-Chen Lin s CG slides Ray-tracing Review For each pixel,
Ray Tracing III Wen-Chieh (Steve) Lin National Chiao-Tung University Shirley, Fundamentals of Computer Graphics, Chap 10 Doug James CG slides, I-Chen Lin s CG slides Ray-tracing Review For each pixel,
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.