Radiance Photography. Todor Georgiev Adobe Systems. Andrew Lumsdaine Indiana University
|
|
|
- Darcy Barrett
- 6 years ago
- Views:
Transcription
1 Radiance Photography Todor Georgiev Adobe Systems Andrew Lumsdaine Indiana University
2 Course Goals Overview of radiance (aka lightfield) photography Mathematical treatment of theory and computation Hands on Mathematics Computation Radiance cameras
3 Outline 1. Background, Motivation, and History 2. Radiance Theory in Spatial and Frequency Domains 3. Capturing Radiance with Radiance Cameras 4. Hands-On with Radiance Cameras 5. Computational Methods for Radiance 6. Fourier Slice Refocusing 7. Vario-Plenoptic Camera (Plenoptic 2.0) 8. Wrap-Up
4 Background and Motivation


5 Brief History of Photography



6 Along Came Photoshop Good News: Anyone can edit pictures Bad News: Anyone can edit pictures
7 Photographs are Collections of Pixels Pixel-based manipulation can change presentation of picture But the relationship of pixels to each other (based on scene) is lost Is a given pixel part of the same object? Is it at the same depth as another pixel?
8 Some Enhancements Are Practically Impossible Changing focus Change aperture / depth of field / F/# Changing view point Detect depth Insert objects These depend on how pixels are created Based on scene physics These changes require taking a different picture
9 Radiance (aka Lightfield) Photography A picture is a rendering of the light rays in a scene Determined by lenses, spacing, aperture, etc Record the light itself rather than rendering the light Defer rendering Then we can synthesize any picture we want Not a new idea (over 100 years old) Technology exists now to make radiance photography practical
10 Capturing Light Itself In a traditional photograph, the sensor integrates rays from every direction at each pixel
11 Capturing Light Itself To create an imprint of light itself, at each pixel we capture rays from different directions individually



12 Capturing All of the Light E.g., Stanford camera array 100 custom cameras
13 Practical Radiance Capture We can capture all of the light in front of a camera (or in the camera) Change focus Change aperture Change viewpoint (limited by camera lens size)
14 Rodin Radiance Capture
15 Change Viewpoint
16 Change Focus

17 Change Focus
18 Change Aperture / All-In-Focus
19 Brief History of Radiance Photography Since 1903


20 F. Ives Patented 1903 Array of pinholes at image plane
")
21 Lippmann (1908)

22 Lippmann (1908) Nobel Prize for Color Photography

23 Lippmann (1908) First Described Light-Field Capturing Device

24 Light-Field Film (1908) See the original paper:

25 H. Ives (1930) Lenticular Lens
")
26 Coffey F/Number Matching (1935)

27 Chutjian (1968) First Digital Light-Field

28 Dudnikov

29 Adelson (1991) Plenoptic Function

30 Adelson (1992) Plenoptic Camera Designed to solve computer vision problems
 the term")
31 Levoy/Hanrahan (1996) the term Light Field

32 Isaksen (2000) Light-Field Refocusing

33 Ng, Tech Report (2005)

34 Fife (2008) Light-Field CCD
35 Radiance Theory and Modeling The main laws of optics and radiance transforms

36 Radiance Capturing rays from different directions individually Parameterizations: Two plane and Location-angle
37 Two Parameterizations of Rays Two plane Location-angle st uv x
, divided by the volume Intuitively it is the light-field or light itself Express radiance as")
38 Radiance Energy density in 4D ray-space Energy in all small p-cones (each one from p to p ) in a small q-box ( from q to q ), perpendicular to p Energy in a small 4D cube around (q, p), divided by the volume Intuitively it is the light-field or light itself Express radiance as r(q,p)
39 Light Transport Through Space Ray transformation
40 Lens Transform (Ray Bender) The further away from center, the more it bends.
41 Summary Two primary optical transforms are Lens and Transport Lens Transport
42 Composition of Optical Elements Transformations corresponding to compositions of optical elements are determined by the constituent transformations
43 Composition of Optical Elements Transformations corresponding to compositions of optical elements are determined by the constituent transformations What is in terms of
44 Composition of Optical Elements Transformations corresponding to compositions of optical elements are determined by the constituent transformations What is in terms of


45 Composition of Optical Elements Transformations corresponding to compositions of optical elements are determined by the constituent transformations What is in terms of


46 Composition of Optical Elements Transformations corresponding to compositions of optical elements are determined by the constituent transformations What is in terms of
47 In Class Exercise Three lens system Composition:
48 Traditional Camera Transfer matrix:
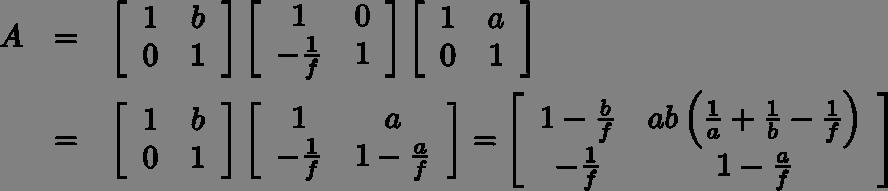
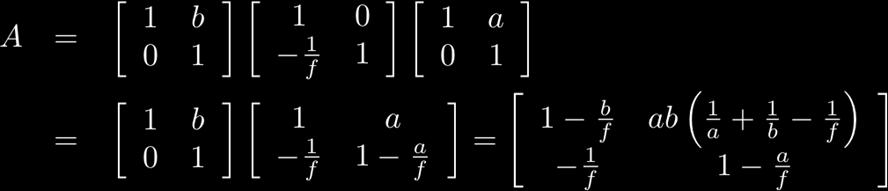
49 Traditional Camera
50 In Class Exercise What is det(a)? Answer: det(a) = 1


51 In Class Exercise How do we focus?
52 In Class Exercise How do we focus? Make top-right element to be zero


53 Traditional Camera How do we enforce this condition?
54 Traditional Camera We have derived the lens equation:
55 In Class Exercise What is det(a)? det(a) = 1
56 2F Camera Lens of focal length f is placed at distance f from sensor
57 2F camera Three optical elements: space, lens, space Scene Transformation:
58 2F camera Scene Again we compute det(a) = 1
59 In Class Exercise In two different cases (conventional and 2F camera) we get the same result: det(a) = 1 Is that always the case? Hint: Every optical system is a composition of L and T, which both have det = 1 And the determinant of a product is the product of the determinants
60 Principal Planes Gauss discovered that the matrix for any optical transform can be written as a product of some appropriate translation, lens, and translation again Often expressed as principal planes :
61 Conservation of Radiance For the 2 transforms the 4D box changes shape Volume remains the same (shear) Must remain the same for any optical transform!
62 Conservation of Radiance Radiance is energy density in 4D ray-space Energy is conserved; volume is conserved Radiance = (energy) / ( volume) Radiance is also conserved!
63 Conservation of Radiance We have derived the following intuitive statement (often seen in light field papers): The radiance is constant along each ray
64 Additional Notes: Conservation of Radiance Similar principle in Hamiltonian mechanics in terms of coordinate q and momentum p: Liouville s theorem As the system evolves in time, volume in qp phase space is conserved State space and particle systems Quantum mechanics In optics, astronomy, and photography, radiance conservation is often mentioned (or implied) in relation to: Throughput Barlow lens Teleconverter F/number
65 Additional Notes: Conservation of Radiance Optical state space is a vector space with optical axis being the zero vector Optical devices, like cameras and microscopes perform linear transforms. Optical transforms are symplectic: They preserve a skew-symmetric dot product in qp-space In terms of that dot product each ray is orthogonal to itself For any optical transform A, det A = 1
66 Radiance Transforms Optical elements transform rays They also transform radiance Points in ray space Radiance before optical transform Radiance after optical transform
67 Radiance Transforms Any ray x after transform is related to original ray by Because of radiance conservation Since The radiance after optical transformation is related to the original radiance by:
68 Radiance Transforms The radiance after optical transformation is related to the original radiance by: What is that for translation? So
69 In Class Exercise The radiance after optical transformation is related to the original radiance by: What is that for a lens? So
70 Image Rendering Now that we have the lightfield (all of the light in a scene) how do we turn q and p into a picture? (A rendered image)? Use physics of lightfield and image formation
71 Image Rendering A traditional image is formed by integrating rays from all directions at each pixel A traditional image is rendered from a radiance according to
72 Capturing Radiance with Radiance Cameras

73 Capturing Radiance To capture radiance, we need to capture rays from different directions individually But sensors are not directional Rays from different directions need to be mapped to different positions (different pixels)
74 Pinhole Camera Rays can only enter camera at one point (q = 0) Rays from different directions spread apart inside camera And are captured at different positions on the sensor Switches direction and position Captures angular distribution of radiance


75 Pinhole camera More precisely Switches angle and position Captures angular distribution of radiance
76 2F Camera Generalizes pinhole camera Lens of focal length f is placed at distance f from sensor Switches angle and position Captures angular distribution of radiance assuming it doesn t change much with q (close to q = 0)
77 2F camera This is the lens generalization of the pinhole camera Three optical elements: space, lens, space Scene Transformation:


78 2F camera This is the lens generalization of the pinhole camera Three optical elements: space, lens, space Scene Show that D is the aperture diameter Switches angle and position Captures angular distribution of radiance (at q = 0)

79 Traditional 2D camera Three optical elements: space, lens, space Show that approximately.
80 Capturing Radiance Pinhole camera or 2F camera capture an image I(q) I(q) captures angular distribution of radiance Only for small area around q = 0 so far For complete radiance, we need to capture angular distribution for all q Basic Idea: Replicate pinhole or 2F at every q Ives (pinhole) Lippmann ( 2F )
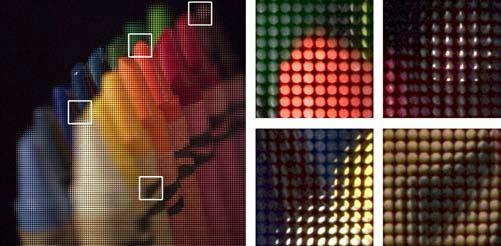
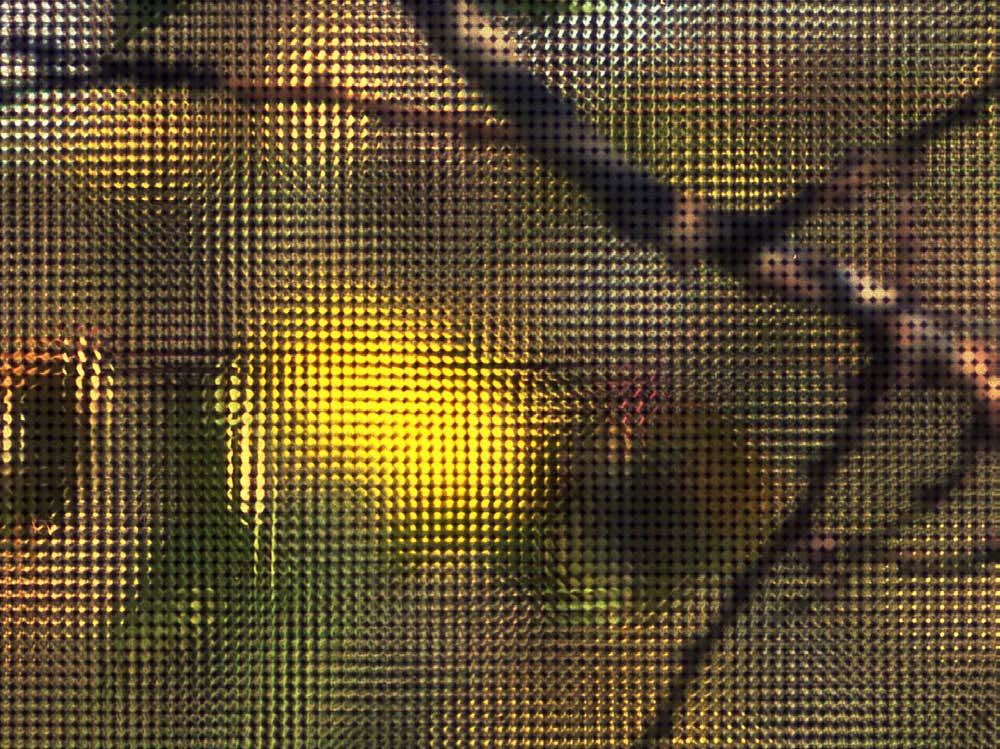
81 Ives Camera At the image plane: Multiplexing in space: Each pinhole image captures angular distribution of radiance. All images together describe The complete 4D radiance.
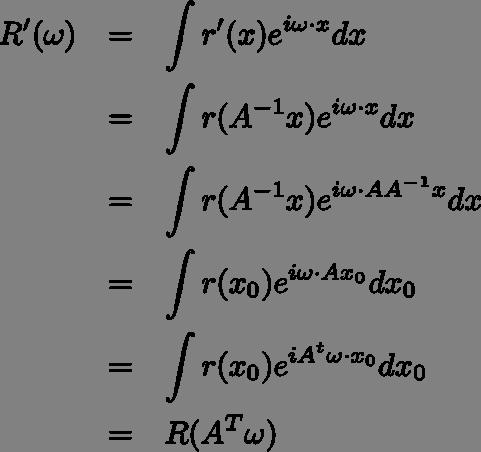
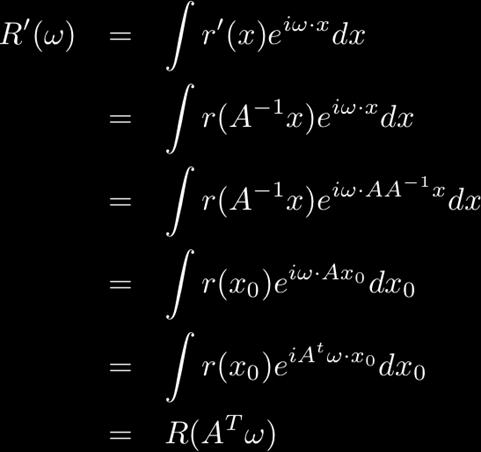
82 Radiance in Frequency Domain In the frequency domain, the two optical elements switch places: lens becomes space; space becomes lens
83 Radiance Transforms (Frequency Domain) Converting radiance into frequency representation gives us a new tool for analysis, and new power. A pixel no longer stands by itself, representing a point in one single image / slice in 4D radiance. In the frequency domain one pixel can represent multiple images at the same time. Those images are slices of the 4D radiance, but now in the frequency domain. By optically combining multiple frequencies, we achieve new and more efficient use of the sensor.
84 Radiance Transforms (Frequency Domain) Radiance in frequency representation: where and Next we derive the relation between and due to optical transform
85 Radiance Transforms (Frequency Domain)


86 Radiance Transforms Main results (summary): Note: Shear is in the other direction in frequency domain due to the transposed matrix. Lens <-> space. Note: The inverse always exists because det A = 1.
87 Ives Camera: Frequency Multiplexing Poisson summation formula train of delta functions = train of frequencies Prove
88 Ives Camera: Frequency Multiplexing Transposed translation f

89 Ives Camera: Frequency Multiplexing Band limited radiance Veeraraghavan s idea:
90 Cosine Mask Camera (MERL) A transparency, superposition of cos terms, is placed at distance f from the sensor Consider for example: Derive the expression for the radiance at the sensor:
91 Periodic Mask Camera (Adobe) Input:

")


92 Periodic Mask Camera (Adobe) Output:

93 Ives camera: Multiplexing in frequency

94 Ives camera: Multiplexing in frequency

95 Ives camera: Multiplexing in frequency
96 Lippmann s Camera Space multiplexing Lenses instead of pinholes A 2F camera replaces each pinhole camera in Ives design
97 Lippmann s Camera Heterodyning Frequency multiplexing or heterodyning analysis can be done in two steps: 1. Consider array of shifted pinhole-prisms with constant shift a, and prism angle a/f 2. Superposition of arrays with different shifts to implement microlenses as Fresnel lenses.
98 Lippmann s Camera Heterodyning Starting with Derive the radiance at the focal plane Show that at zero angular frequency it becomes:
99 Lippmann s Camera Heterodyning (derivations)
100 Lippmann s Camera Heterodyning (derivations)

101 Lippmann s Camera Heterodyning Video: Integral camera with frequency multiplexing Thanks to Ren Ng for providing the lightfield image.

102 Lippmann s Camera Heterodyning
103 Radiance Cameras with External Optical Elements

104 Arrays of Lenses and Prisms The most popular light-field camera is simply an array of conventional cameras. Alternatively, an array of lenses with a common sensor.
105 Arrays of Lenses and Prisms Shifting cameras from the optical axis means: We need to extend the vector space treatment to affine space treatment. Prism transform Shifted lens Lens + prism Those are equal
106 Adobe Camera Arrays of Lenses and Prisms Camera designs based on the above idea:

107 Adobe Camera Arrays of Lenses and Prisms

108 Mosquito Net Camera

109 Mosquito Net Camera Demo
110 Hands On with Radiance Cameras

111 Handheld Plenoptic Camera
112 Computational Methods for Radiance
113 Radiance Representation I(q) is an image Represents sampled lightfield Position is sampled by microlenses as pixels
114 Radiance Representation I(q) is an image Represents sampled lightfield Position is sampled by microlenses Direction is sampled by sensor pixels
115 Radiance Representation I(q) is an image Represents radiance sampled in position and direction
116 Radiance Representation
117 Radiance Representation 4D array 2D array of 2D arrays Position major q p


118 Radiance Representation
119 Radiance Representation 4D array q 2D array of 2D arrays Direction major p
120 Creating Radiance Array Given 2D flat captured by radiance camera Create 4D array Sample the same directional pixel from every position
121 Creating Radiance Array Given 2D flat captured by radiance camera Create 4D array If 2D position major flat happens to be regular (jnds,inds) = mgrid[0:height:nump,0:width:nump] for j in range(0,nump): for i in range(0,nump): radiance[:,:,j,i] = image[jnds+j,inds+i] Python, matlab very similar Samples the same directional pixel from every position
122 Creating Radiance Array Given 2D flat captured by radiance camera Create 4D array Sample the same positional pixel from every direction
123 Creating Radiance Array Given 2D flat captured by radiance camera Create 4D array If 2D direction major flat happens to be regular (jnds,inds) = mgrid[0:height:numq,0:width:numq] for j in range(0,numq): for i in range(0,numq): radiance[j,i,:,:] = image[jnds+j,inds+i] Python, matlab very similar Samples the same positional pixel from every direction
124 Aside: Dimensionality How large of a sensor do we need to capture radiance? Memory, computation requirements? What is a reasonable size for a rendered image?
125 Image Rendering A traditional image is formed by integrating rays from every direction at each pixel
126 Image Rendering Integration is averaging over directions at each position
127 Image Rendering Integration is averaging over directions at each position for j in range(0, nump): for i in range(0, nump): rendered[:,:] += radiance[:,:,j,i] rendered /= (nump * nump)
128 Rendering New Images Averaging recovers traditional image Can also render new images Different aperture Different viewpoint Different focus

129 Different Aperture A smaller aperture is a smaller set of directions
130 Different Aperture A smaller aperture is a smaller set of directions for j in range(alpha, nump-alpha): for i in range(alpha, nump-alpha): rendered[:,:] += radiance[:,:,j,i] rendered /= ((nump-alpha) * (nump-alpha))
131 Pinhole Rendering (single viewpoint) Only render from one pixel rendered[:,:] = radiance[:,:,j,i]

132 Different Viewpoints Different viewpoint is different direction Render different directions (or sets of directions)

133 Different Viewpoints Different viewpoint is different direction Render different directions (or sets of directions)

134 Different Viewpoints Different viewpoint is different direction Render different directions (or sets of directions)
135 Orchard
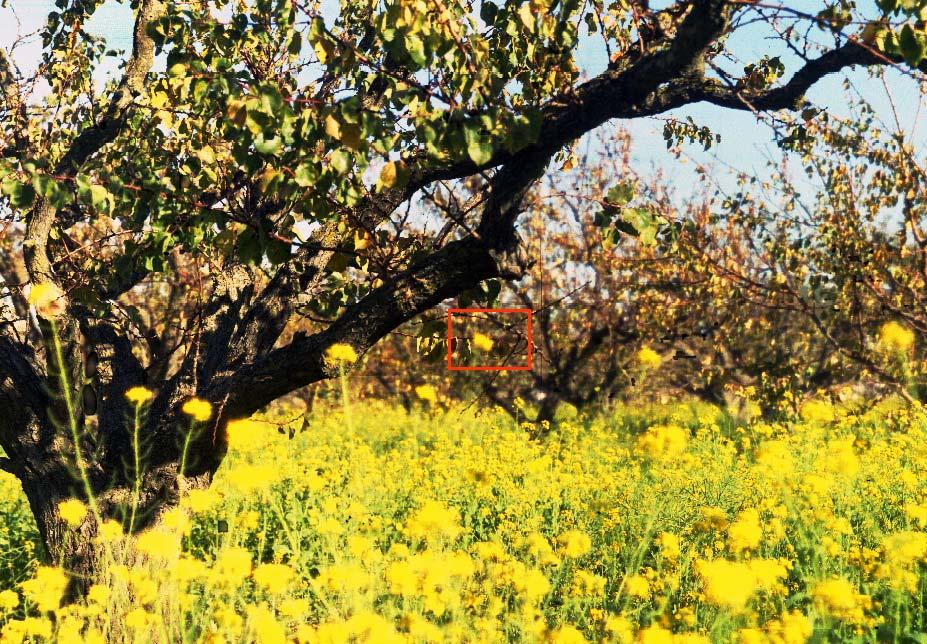
136 Orchard
137 Orchard
138 Orchard
139 Refocusing When we refocus a camera, we change the distance from the lens to the sensor Same object is no longer in focus.
140 Computational Refocusing Change the distance (translate) computationally Two different radiances, r1 and r2
141 Computational Refocusing We capture radiance r1. How can we compute r2? We need translation transform of the radiance.
142 Algorithm: Computational Refocusing Apply shearing transformation: Then render the new image:
143 Algorithm: Refocusing (yind,xind,wind,vind) = mgrid[0:m,0:n,0:r,0:s] shear_y = y + t*wind / r shear_x = x + t*vind / s rad_p = interpolate(rad, [shear_y, shear_x, wind, vind])
144 Fourier Slice Refocusing Ng 2005
145 Efficient Computational Refocusing Refocusing in the spatial domain requires operations for each refocused image An alternative approach (invented by Ren Ng) requires for initial setup but then for each rendered image we need only Insight: Refocus in the frequency domain The frequency domain representation of the rendering integral is the DC directional component (slice)
146 Transform of Rendered Image The Fourier transform of a rendered image: Recall that Thus we have In other words, the transform of the rendered image is the DC directional component of
147 Translation in the Frequency Domain Recall In the case of translation But we are interested in the case I.e., The refocused image is just a slice (with slope t)
148 Algorithm: Fourier Slice Refocusing Take FFT of radiance: Interpolate to get a slice: Take inverse FFT
149 Algorithm: Fourier Slice Refocusing radiancefft = fftn(radiance) (yind,xind) = mgrid[0:m,0:n] vind = t*yind / m uind = t*xind / n slice = interploate(radiancefft, [yind, xind, vind, uind]) rendered = ifft2(slice)

150 Demo: Fourier Slice Refocusing
151 Demo: Fourier Slice Refocusing
152 Demo: Fourier Slice Refocusing

153 Demo: Fourier Slice Refocusing
154 Demo: Fourier Slice Refocusing
155 Demo: Fourier Slice Refocusing
156 Plenoptic Camera 2.0 (See Supplemental Slides)
157 Wrap Up Questions answered Issues explored
158 References
159 Recommended reading Reading material has been selected for its educational value Many important references have been dropped in the effort to make this reading list short
160 Reading material GERRARD A., BURCH J. M.: Introduction to matrix methods in optics. GUILLEMIN V., STERNBERG S.: Symplectic techniques in physics IVES F., US Patent 725,567. (Year: 1903) LIPPMANN, G., Epreuvesreversibles, J. Phys. 7, pp , (1908)
161 Reading material
Computational Methods for Radiance. Render the full variety offered by the direct observation of objects. (Computationally).
.") Computational Methods for Radiance Render the full variety offered by the direct observation of objects. (Computationally). Methods for Plenoptic 1.0 Computing with Radiance Goal: Render the full variety
Computational Methods for Radiance Render the full variety offered by the direct observation of objects. (Computationally). Methods for Plenoptic 1.0 Computing with Radiance Goal: Render the full variety
Computational Photography: Real Time Plenoptic Rendering
 Computational Photography: Real Time Plenoptic Rendering Andrew Lumsdaine, Georgi Chunev Indiana University Todor Georgiev Adobe Systems Who was at the Keynote Yesterday? 2 Overview Plenoptic cameras Rendering
Computational Photography: Real Time Plenoptic Rendering Andrew Lumsdaine, Georgi Chunev Indiana University Todor Georgiev Adobe Systems Who was at the Keynote Yesterday? 2 Overview Plenoptic cameras Rendering
The Focused Plenoptic Camera. Lightfield photographers, focus your cameras! Karl Marx
 The Focused Plenoptic Camera Lightfield photographers, focus your cameras! Karl Marx Plenoptic Camera, Adelson 1992 Main lens focused on microlenses Plenoptic Camera, Adelson 1992 Microlenses focused on
The Focused Plenoptic Camera Lightfield photographers, focus your cameras! Karl Marx Plenoptic Camera, Adelson 1992 Main lens focused on microlenses Plenoptic Camera, Adelson 1992 Microlenses focused on
Title: The Future of Photography is Computational Photography. Subtitle: 100 years after invention, Integral Photography becomes feasible
 Title: The Future of Photography is Computational Photography Subtitle: 100 years after invention, Integral Photography becomes feasible Adobe customers are creative and demanding. They expect to use our
Title: The Future of Photography is Computational Photography Subtitle: 100 years after invention, Integral Photography becomes feasible Adobe customers are creative and demanding. They expect to use our
Coding and Modulation in Cameras
 Mitsubishi Electric Research Laboratories Raskar 2007 Coding and Modulation in Cameras Ramesh Raskar with Ashok Veeraraghavan, Amit Agrawal, Jack Tumblin, Ankit Mohan Mitsubishi Electric Research Labs
Mitsubishi Electric Research Laboratories Raskar 2007 Coding and Modulation in Cameras Ramesh Raskar with Ashok Veeraraghavan, Amit Agrawal, Jack Tumblin, Ankit Mohan Mitsubishi Electric Research Labs
Computational Photography
 Computational Photography Matthias Zwicker University of Bern Fall 2010 Today Light fields Introduction Light fields Signal processing analysis Light field cameras Application Introduction Pinhole camera
Computational Photography Matthias Zwicker University of Bern Fall 2010 Today Light fields Introduction Light fields Signal processing analysis Light field cameras Application Introduction Pinhole camera
Focal stacks and lightfields
 Focal stacks and lightfields http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 11 Course announcements Homework 3 is out. - Due October 12 th.
Focal stacks and lightfields http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 11 Course announcements Homework 3 is out. - Due October 12 th.
Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography
 Mitsubishi Electric Research Labs (MERL) Computational Cameras Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography Amit Agrawal Mitsubishi Electric Research Labs (MERL)
Mitsubishi Electric Research Labs (MERL) Computational Cameras Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography Amit Agrawal Mitsubishi Electric Research Labs (MERL)
Modeling Light. Michal Havlik : Computational Photography Alexei Efros, CMU, Fall 2007
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Plenoptic Function Figure by Leonard McMillan Q: What is the set of all things that we can ever see? A: The
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Plenoptic Function Figure by Leonard McMillan Q: What is the set of all things that we can ever see? A: The
Plenoptic camera and its Applications
 Aum Sri Sairam Plenoptic camera and its Applications Agenda: 1. Introduction 2. Single lens stereo design 3. Plenoptic camera design 4. Depth estimation 5. Synthetic refocusing 6. Fourier slicing 7. References
Aum Sri Sairam Plenoptic camera and its Applications Agenda: 1. Introduction 2. Single lens stereo design 3. Plenoptic camera design 4. Depth estimation 5. Synthetic refocusing 6. Fourier slicing 7. References
Modeling Light. Slides from Alexei A. Efros and others
 Project 3 Results http://www.cs.brown.edu/courses/cs129/results/proj3/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj3/damoreno/ http://www.cs.brown.edu/courses/cs129/results/proj3/taox/ Stereo
Project 3 Results http://www.cs.brown.edu/courses/cs129/results/proj3/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj3/damoreno/ http://www.cs.brown.edu/courses/cs129/results/proj3/taox/ Stereo
Depth Estimation with a Plenoptic Camera
 Depth Estimation with a Plenoptic Camera Steven P. Carpenter 1 Auburn University, Auburn, AL, 36849 The plenoptic camera is a tool capable of recording significantly more data concerning a particular image
Depth Estimation with a Plenoptic Camera Steven P. Carpenter 1 Auburn University, Auburn, AL, 36849 The plenoptic camera is a tool capable of recording significantly more data concerning a particular image
Modeling Light. Michal Havlik
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 What is light? Electromagnetic radiation (EMR) moving along rays in space R( ) is EMR, measured in units of
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 What is light? Electromagnetic radiation (EMR) moving along rays in space R( ) is EMR, measured in units of
Focused Plenoptic Camera and Rendering. Focused Plenoptic Camera and Rendering. Todor Georgiev 1, a) 2, b) and Andrew Lumsdaine
 2, b) and Andrew Lumsdaine") Focused Plenoptic Camera and Rendering Todor Georgiev 1, a) 2, b) and Andrew Lumsdaine 1) Adobe Systems Inc. 2) Indiana University (Dated: 3 March 2010) Plenoptic cameras, constructed with internal microlens
Focused Plenoptic Camera and Rendering Todor Georgiev 1, a) 2, b) and Andrew Lumsdaine 1) Adobe Systems Inc. 2) Indiana University (Dated: 3 March 2010) Plenoptic cameras, constructed with internal microlens
AN O(N 2 LOG(N)) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM
) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM") AN O(N 2 LOG(N)) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM Fernando Pérez Nava +, Jonás Philipp Lüke + Departamento de Estadística, Investigación Operativa y Computación Departamento de Física Fundamental
AN O(N 2 LOG(N)) PER PLANE FAST DISCRETE FOCAL STACK TRANSFORM Fernando Pérez Nava +, Jonás Philipp Lüke + Departamento de Estadística, Investigación Operativa y Computación Departamento de Física Fundamental
The CAFADIS camera: a new tomographic wavefront sensor for Adaptive Optics.
 1st AO4ELT conference, 05011 (2010) DOI:10.1051/ao4elt/201005011 Owned by the authors, published by EDP Sciences, 2010 The CAFADIS camera: a new tomographic wavefront sensor for Adaptive Optics. J.M. Rodríguez-Ramos
1st AO4ELT conference, 05011 (2010) DOI:10.1051/ao4elt/201005011 Owned by the authors, published by EDP Sciences, 2010 The CAFADIS camera: a new tomographic wavefront sensor for Adaptive Optics. J.M. Rodríguez-Ramos
Modeling Light. Michal Havlik : Computational Photography Alexei Efros, CMU, Fall 2011
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Modeling Light. On Simulating the Visual Experience
 Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Agenda. Perspective projection. Rotations. Camera models
 Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
3D Surface Reconstruction Based On Plenoptic Image. Haiqiao Zhang
 3D Surface Reconstruction Based On Plenoptic Image by Haiqiao Zhang A thesis submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements for the Degree of Master of
3D Surface Reconstruction Based On Plenoptic Image by Haiqiao Zhang A thesis submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements for the Degree of Master of
ECE-161C Cameras. Nuno Vasconcelos ECE Department, UCSD
 ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Modeling Light. Michal Havlik
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 What is light? Electromagnetic radiation (EMR) moving along rays in space R(λ) is EMR, measured in units of power
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Analysis of Two Representative Algorithms of Depth Estimation from Light Field Images
 Analysis of Two Representative Algorithms of Depth Estimation from Light Field Images by Yutao Chen A Report Submitted in Partial Fulfillment of the Requirements for the Degree of MASTER OF ENGINEERING
Analysis of Two Representative Algorithms of Depth Estimation from Light Field Images by Yutao Chen A Report Submitted in Partial Fulfillment of the Requirements for the Degree of MASTER OF ENGINEERING
Robotics - Projective Geometry and Camera model. Marcello Restelli
 Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Introduction to Computer Vision. Introduction CMPSCI 591A/691A CMPSCI 570/670. Image Formation
 Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
Introduction to 3D Concepts
 PART I Introduction to 3D Concepts Chapter 1 Scene... 3 Chapter 2 Rendering: OpenGL (OGL) and Adobe Ray Tracer (ART)...19 1 CHAPTER 1 Scene s0010 1.1. The 3D Scene p0010 A typical 3D scene has several
PART I Introduction to 3D Concepts Chapter 1 Scene... 3 Chapter 2 Rendering: OpenGL (OGL) and Adobe Ray Tracer (ART)...19 1 CHAPTER 1 Scene s0010 1.1. The 3D Scene p0010 A typical 3D scene has several
Holojackets. Semester Update: Fall 2017 December 4, 2017
 Holojackets Semester Update: Fall 2017 December 4, 2017 Agenda Team Focus Problem Statement Background Research Team Structure Progress Conclusion/Project Plan 2 Team Focus Prototype 3D displays that allow
Holojackets Semester Update: Fall 2017 December 4, 2017 Agenda Team Focus Problem Statement Background Research Team Structure Progress Conclusion/Project Plan 2 Team Focus Prototype 3D displays that allow
Computer Vision Project-1
 University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
An Approach on Hardware Design for Computationally Intensive Image Processing Applications based on Light Field Refocusing Algorithm
 An Approach on Hardware Design for Computationally Intensive Image Processing Applications based on Light Field Refocusing Algorithm Jiayuan Meng, Dee A.B. Weikle, Greg Humphreys, Kevin Skadron Dept. of
An Approach on Hardware Design for Computationally Intensive Image Processing Applications based on Light Field Refocusing Algorithm Jiayuan Meng, Dee A.B. Weikle, Greg Humphreys, Kevin Skadron Dept. of
AS the most important medium for people to perceive
 JOURNAL OF L A T E X CLASS FILES, VOL. XX, NO. X, OCTOBER 2017 1 Light Field Image Processing: An Overview Gaochang Wu, Belen Masia, Adrian Jarabo, Yuchen Zhang, Liangyong Wang, Qionghai Dai, Senior Member,
JOURNAL OF L A T E X CLASS FILES, VOL. XX, NO. X, OCTOBER 2017 1 Light Field Image Processing: An Overview Gaochang Wu, Belen Masia, Adrian Jarabo, Yuchen Zhang, Liangyong Wang, Qionghai Dai, Senior Member,
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Specifying Complex Scenes
 Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
L1a: Introduction to Light Fields
 L1a: Introduction to Light Fields 2018 IEEE SPS Summer School on Light Field Data Representation, Interpretation, and Compression Donald G. Dansereau, May 2018 Schedule 2 Outline Lecture 1a: Introduction
L1a: Introduction to Light Fields 2018 IEEE SPS Summer School on Light Field Data Representation, Interpretation, and Compression Donald G. Dansereau, May 2018 Schedule 2 Outline Lecture 1a: Introduction
Ray Optics I. Last time, finished EM theory Looked at complex boundary problems TIR: Snell s law complex Metal mirrors: index complex
 Phys 531 Lecture 8 20 September 2005 Ray Optics I Last time, finished EM theory Looked at complex boundary problems TIR: Snell s law complex Metal mirrors: index complex Today shift gears, start applying
Phys 531 Lecture 8 20 September 2005 Ray Optics I Last time, finished EM theory Looked at complex boundary problems TIR: Snell s law complex Metal mirrors: index complex Today shift gears, start applying
INFOGR Computer Graphics. J. Bikker - April-July Lecture 10: Shading Models. Welcome!
 INFOGR Computer Graphics J. Bikker - April-July 2016 - Lecture 10: Shading Models Welcome! Today s Agenda: Introduction Light Transport Materials Sensors Shading INFOGR Lecture 10 Shading Models 3 Introduction
INFOGR Computer Graphics J. Bikker - April-July 2016 - Lecture 10: Shading Models Welcome! Today s Agenda: Introduction Light Transport Materials Sensors Shading INFOGR Lecture 10 Shading Models 3 Introduction
DEPTH AND ANGULAR RESOLUTION IN PLENOPTIC CAMERAS. M. Damghanian, R. Olsson, M. Sjöström
 This material is published in the open archive of Mid Sweden University DIVA http://miun.diva-portal.org to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein
This material is published in the open archive of Mid Sweden University DIVA http://miun.diva-portal.org to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein
Plenoptic Cameras. Bastian Goldlücke, Oliver Klehm, Sven Wanner, and Elmar Eisemann. 5.1 Introduction
 Plenoptic Cameras Bastian Goldlücke, Oliver Klehm, Sven Wanner, and Elmar Eisemann 5.1 Introduction The light field, as defined by Gershun in 1936 [Gershun 36] describes the radiance traveling in every
Plenoptic Cameras Bastian Goldlücke, Oliver Klehm, Sven Wanner, and Elmar Eisemann 5.1 Introduction The light field, as defined by Gershun in 1936 [Gershun 36] describes the radiance traveling in every
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
DEPTH, STEREO AND FOCUS WITH LIGHT-FIELD CAMERAS
 DEPTH, STEREO AND FOCUS WITH LIGHT-FIELD CAMERAS CINEC 2014 Frederik Zilly, Head of Group Computational Imaging & Algorithms Moving Picture Technologies Department, Fraunhofer IIS Fraunhofer, Frederik
DEPTH, STEREO AND FOCUS WITH LIGHT-FIELD CAMERAS CINEC 2014 Frederik Zilly, Head of Group Computational Imaging & Algorithms Moving Picture Technologies Department, Fraunhofer IIS Fraunhofer, Frederik
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CS201 Computer Vision Lect 4 - Image Formation
 CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
Lecture 15: Image-Based Rendering and the Light Field. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
AP Physics: Curved Mirrors and Lenses
 The Ray Model of Light Light often travels in straight lines. We represent light using rays, which are straight lines emanating from an object. This is an idealization, but is very useful for geometric
The Ray Model of Light Light often travels in straight lines. We represent light using rays, which are straight lines emanating from an object. This is an idealization, but is very useful for geometric
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Chapter 34. Thin Lenses
 Chapter 34 Thin Lenses Thin Lenses Mirrors Lenses Optical Instruments MFMcGraw-PHY 2426 Chap34a-Lenses-Revised: 7/13/2013 2 Inversion A right-handed coordinate system becomes a left-handed coordinate system
Chapter 34 Thin Lenses Thin Lenses Mirrors Lenses Optical Instruments MFMcGraw-PHY 2426 Chap34a-Lenses-Revised: 7/13/2013 2 Inversion A right-handed coordinate system becomes a left-handed coordinate system
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Three Main Themes of Computer Graphics
 Three Main Themes of Computer Graphics Modeling How do we represent (or model) 3-D objects? How do we construct models for specific objects? Animation How do we represent the motion of objects? How do
Three Main Themes of Computer Graphics Modeling How do we represent (or model) 3-D objects? How do we construct models for specific objects? Animation How do we represent the motion of objects? How do
DEVELOPMENT AND EVALUATION OF DEPTH ESTIMATION FROM PLENOPTIC IMAGING FOR APPLICATION IN RETINAL IMAGING
 DEVELOPMENT AND EVALUATION OF DEPTH ESTIMATION FROM PLENOPTIC IMAGING FOR APPLICATION IN RETINAL IMAGING by RICHARD JAMES MARSHALL A thesis submitted to the University of Birmingham for the degree of DOCTOR
DEVELOPMENT AND EVALUATION OF DEPTH ESTIMATION FROM PLENOPTIC IMAGING FOR APPLICATION IN RETINAL IMAGING by RICHARD JAMES MARSHALL A thesis submitted to the University of Birmingham for the degree of DOCTOR
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
The Lens. Refraction and The Lens. Figure 1a:
 Lenses are used in many different optical devices. They are found in telescopes, binoculars, cameras, camcorders and eyeglasses. Even your eye contains a lens that helps you see objects at different distances.
Lenses are used in many different optical devices. They are found in telescopes, binoculars, cameras, camcorders and eyeglasses. Even your eye contains a lens that helps you see objects at different distances.
 http://www.diva-portal.org This is the published version of a paper presented at 2018 3DTV Conference: The True Vision - Capture, Transmission and Display of 3D Video (3DTV-CON), Stockholm Helsinki Stockholm,
http://www.diva-portal.org This is the published version of a paper presented at 2018 3DTV Conference: The True Vision - Capture, Transmission and Display of 3D Video (3DTV-CON), Stockholm Helsinki Stockholm,
Augmented Reality II - Camera Calibration - Gudrun Klinker May 11, 2004
 Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
3D graphics, raster and colors CS312 Fall 2010
 Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Understanding Variability
 Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
CS354 Computer Graphics Ray Tracing. Qixing Huang Januray 24th 2017
 CS354 Computer Graphics Ray Tracing Qixing Huang Januray 24th 2017 Graphics Pipeline Elements of rendering Object Light Material Camera Geometric optics Modern theories of light treat it as both a wave
CS354 Computer Graphics Ray Tracing Qixing Huang Januray 24th 2017 Graphics Pipeline Elements of rendering Object Light Material Camera Geometric optics Modern theories of light treat it as both a wave
Cameras and Radiometry. Last lecture in a nutshell. Conversion Euclidean -> Homogenous -> Euclidean. Affine Camera Model. Simplified Camera Models
 Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Light Transport CS434. Daniel G. Aliaga Department of Computer Science Purdue University
 Light Transport CS434 Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and Global Illumination Models Helmholtz Reciprocity Dual Photography/Light Transport (in Real-World)
Light Transport CS434 Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and Global Illumination Models Helmholtz Reciprocity Dual Photography/Light Transport (in Real-World)
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Michael Moody School of Pharmacy University of London 29/39 Brunswick Square London WC1N 1AX, U.K.
 This material is provided for educational use only. The information in these slides including all data, images and related materials are the property of : Michael Moody School of Pharmacy University of
This material is provided for educational use only. The information in these slides including all data, images and related materials are the property of : Michael Moody School of Pharmacy University of
Dense Lightfield Disparity Estimation using Total Variation Regularization
 Dense Lightfield Disparity Estimation using Total Variation Regularization Nuno Barroso Monteiro 1,2, João Pedro Barreto 2, and José Gaspar 1 1 Institute for Systems and Robotics, Univ. of Lisbon, Portugal
Dense Lightfield Disparity Estimation using Total Variation Regularization Nuno Barroso Monteiro 1,2, João Pedro Barreto 2, and José Gaspar 1 1 Institute for Systems and Robotics, Univ. of Lisbon, Portugal
Computer Vision CS 776 Fall 2018
 Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Topic 12: Texture Mapping. Motivation Sources of texture Texture coordinates Bump mapping, mip-mapping & env mapping
 Topic 12: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip-mapping & env mapping Texture sources: Photographs Texture sources: Procedural Texture sources: Solid textures
Topic 12: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip-mapping & env mapping Texture sources: Photographs Texture sources: Procedural Texture sources: Solid textures
Three-Dimensional Viewing Hearn & Baker Chapter 7
 Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Topic 11: Texture Mapping 11/13/2017. Texture sources: Solid textures. Texture sources: Synthesized
 Topic 11: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip mapping & env mapping Texture sources: Photographs Texture sources: Procedural Texture sources: Solid textures
Topic 11: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip mapping & env mapping Texture sources: Photographs Texture sources: Procedural Texture sources: Solid textures
The Light Field and Image-Based Rendering
 Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
3D Volume Reconstruction From 2D Plenoptic Data Using FFT-Based Methods. John Paul Anglin
 3D Volume Reconstruction From 2D Plenoptic Data Using FFT-Based Methods by John Paul Anglin A dissertation submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements
3D Volume Reconstruction From 2D Plenoptic Data Using FFT-Based Methods by John Paul Anglin A dissertation submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements
ONE MARK QUESTIONS GEOMETRICAL OPTICS QUESTION BANK
 ONE MARK QUESTIONS 1. What is lateral shift? 2. What should be the angle of incidence to have maximum lateral shift? 3. For what angle, lateral shift is minimum? 4. What is Normal shift? 5. What is total
ONE MARK QUESTIONS 1. What is lateral shift? 2. What should be the angle of incidence to have maximum lateral shift? 3. For what angle, lateral shift is minimum? 4. What is Normal shift? 5. What is total
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Final Exam. Today s Review of Optics Polarization Reflection and transmission Linear and circular polarization Stokes parameters/jones calculus
 Physics 42200 Waves & Oscillations Lecture 40 Review Spring 206 Semester Matthew Jones Final Exam Date:Tuesday, May 3 th Time:7:00 to 9:00 pm Room: Phys 2 You can bring one double-sided pages of notes/formulas.
Physics 42200 Waves & Oscillations Lecture 40 Review Spring 206 Semester Matthew Jones Final Exam Date:Tuesday, May 3 th Time:7:00 to 9:00 pm Room: Phys 2 You can bring one double-sided pages of notes/formulas.
Realistic Camera Model
 Realistic Camera Model Shan-Yung Yang November 2, 2006 Shan-Yung Yang () Realistic Camera Model November 2, 2006 1 / 25 Outline Introduction Lens system Thick lens approximation Radiometry Sampling Assignment
Realistic Camera Model Shan-Yung Yang November 2, 2006 Shan-Yung Yang () Realistic Camera Model November 2, 2006 1 / 25 Outline Introduction Lens system Thick lens approximation Radiometry Sampling Assignment
Topic 11: Texture Mapping 10/21/2015. Photographs. Solid textures. Procedural
 Topic 11: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip mapping & env mapping Topic 11: Photographs Texture Mapping Motivation Sources of texture Texture coordinates
Topic 11: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip mapping & env mapping Topic 11: Photographs Texture Mapping Motivation Sources of texture Texture coordinates
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
RANGEFINDING WITH A PLENOPTIC CAMERA THESIS. Robert A. Raynor, 2nd Lieutenant, USAF AFIT-ENP-14-M-29 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY
 RANGEFINDING WITH A PLENOPTIC CAMERA THESIS Robert A. Raynor, 2nd Lieutenant, USAF AFIT-ENP-14-M-29 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson Air Force
RANGEFINDING WITH A PLENOPTIC CAMERA THESIS Robert A. Raynor, 2nd Lieutenant, USAF AFIT-ENP-14-M-29 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson Air Force
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Chapters 1-4: Summary
 Chapters 1-4: Summary So far, we have been investigating the image acquisition process. Chapter 1: General introduction Chapter 2: Radiation source and properties Chapter 3: Radiation interaction with
Chapters 1-4: Summary So far, we have been investigating the image acquisition process. Chapter 1: General introduction Chapter 2: Radiation source and properties Chapter 3: Radiation interaction with
Waves & Oscillations
 Physics 42200 Waves & Oscillations Lecture 40 Review Spring 2016 Semester Matthew Jones Final Exam Date:Tuesday, May 3 th Time:7:00 to 9:00 pm Room: Phys 112 You can bring one double-sided pages of notes/formulas.
Physics 42200 Waves & Oscillations Lecture 40 Review Spring 2016 Semester Matthew Jones Final Exam Date:Tuesday, May 3 th Time:7:00 to 9:00 pm Room: Phys 112 You can bring one double-sided pages of notes/formulas.
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Computational Photography
 Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
Three-dimensional directional display and pickup
 Three-dimensional directional display and pickup Joonku Hahn NCRCAPAS School of Electrical Engineering Seoul National University CONTENTS I. Introduction II. Three-dimensional directional display 2.1 Uniform
Three-dimensional directional display and pickup Joonku Hahn NCRCAPAS School of Electrical Engineering Seoul National University CONTENTS I. Introduction II. Three-dimensional directional display 2.1 Uniform
Chapter 3 Geometric Optics
 Chapter 3 Geometric Optics [Reading assignment: Goodman, Fourier Optics, Appendix B Ray Optics The full three dimensional wave equation is: (3.) One solution is E E o ûe i ωt± k r ( ). This is a plane
Chapter 3 Geometric Optics [Reading assignment: Goodman, Fourier Optics, Appendix B Ray Optics The full three dimensional wave equation is: (3.) One solution is E E o ûe i ωt± k r ( ). This is a plane
Introduction to Computer Vision. Week 3, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
3D Particle Position Reconstruction Accuracy in Plenoptic PIV
 AIAA SciTech 13-17 January 2014, National Harbor, Maryland 52nd Aerospace Sciences Meeting AIAA 2014-0398 3D Particle Position Reconstruction Accuracy in Plenoptic PIV Timothy W. Fahringer and Brian S.
AIAA SciTech 13-17 January 2014, National Harbor, Maryland 52nd Aerospace Sciences Meeting AIAA 2014-0398 3D Particle Position Reconstruction Accuracy in Plenoptic PIV Timothy W. Fahringer and Brian S.
Advanced Computer Graphics Transformations. Matthias Teschner
 Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space