arxiv: v1 [cs.cv] 23 Nov 2017
|
|
|
- Job Carson
- 5 years ago
- Views:
Transcription





1 SGPN: Similarity Group Proposal Network for 3D Point Cloud Instance Segmentation arxiv: v1 [cs.cv] 23 Nov 2017 Weiyue Wang 1 Ronald Yu 2 Qiangui Huang 1 Ulrich Neumann 1 1 University of Southern California 2 University of California, San Diego Los Angeles, California San Diego, California {weiyuewa,qianguih,uneumann}@usc.edu Abstract We introduce Similarity Group Proposal Network (SGPN), a simple and intuitive deep learning framework for 3D object instance segmentation on point clouds. SGPN uses a single network to predict point grouping proposals and a corresponding semantic class for each proposal, from which we can directly extract instance segmentation results. Important to the effectiveness of SGPN is its novel representation of 3D instance segmentation results in the form of a similarity matrix that indicates the similarity between each pair of points in embedded feature space, thus producing an accurate grouping proposal for each point. To the best of our knowledge, SGPN is the first framework to learn 3D instance-aware semantic segmentation on point clouds. Experimental results on various 3D scenes show the effectiveness of our method on 3D instance segmentation, and we also evaluate the capability of SGPN to improve 3D object detection and semantic segmentation results. We also demonstrate its flexibility by seamlessly incorporating 2D CNN features into the framework to boost performance. 1. Introduction Instance segmentation on 2D images have achieved promising results recently [18, 10, 29, 23]. With the rise of autonomous driving and robotics applications, the demand for 3D scene understanding and the availability of 3D scene data has rapidly increased in recently. Unfortunately, the literature for 3D instance segmentation and object detection lags far behind its 2D counterpart; scene understanding with Convolutional Neural Networks (CNNs) [42, 43, 11] on 3D volumetric data is limited by high memory and computation cost. Recently, deep learning frameworks Point- Net/Pointnet++ [31, 33] on point clouds open up more efficient and flexible ways to handle 3D data. Following the pioneering works in 2D scene understanding, our goal is to develop a novel deep learning framework trained end-to-end for 3D instance-aware semantic segmen- ronaldiscool@gmail.com (a) (b) (c) Figure 1: Instance segmentation for point clouds using SGPN. Different colors represent different instances. (a) Instance segmentation on complete real scenes. (b) Single object part instance segmentation. (c) Instance segmentation on point clouds obtained from partial scans. tation on point clouds that, like established baseline systems for 2D scene understanding tasks, is intuitive, simple, flexible, and effective. An important consideration for instance segmentation on a point cloud is how to represent output results. Inspired by the trend of predicting proposals for tasks with a variable number of outputs, we introduce a Similarity Group Proposal Network (SGPN), which formulates group proposals of object instances by learning a novel 3D instance segmentation representation in the form of a similarity matrix. Our pipeline first uses PointNet/PointNet++ to extract a descriptive feature vector for each point in the point cloud. As a form of similarity metric learning, we enforce the idea that points belonging to the same object instance should have very similar features; hence we measure the distance between the features of each pair of points in order to form 1
2 a similarity matrix that indicates whether any given pair of points belong to the same object instance. The rows in our similarity matrix can be viewed as instance candidates, which we combine with learned confidence scores in order to generate plausible group proposals. We also learn a semantic segmentation map in order to classify each object instance obtained from our group proposals. We are also able to directly derive tight 3D bounding boxes for object detection. By simply measuring the distance between overdetermined feature representations of each pair of points, our similarity matrix simplifies our pipeline in that we remain in the natural point cloud representation of defining our objects by the relationships between points. In summary, SGPN has three output branches for instance segmentation on point clouds: a similarity matrix yielding point-wise group proposals, a confidence map for pruning these proposals, and a semantic segmentation map to give the class label for each group. SGPN is to the best of our knowledge the first deep learning framework to learn 3D instance segmentation on point clouds. We evaluate our framework on both 3D shapes (ShapeNet [4]) and real 3D scenes (Stanford Indoor Semantic Dataset [1] and NYUV2 [40]) and demonstrate that SGPN achieves state-of-the-art results on 3D instance segmentation. We also conduct comprehensive experiments to show the capability of SGPN on achieving high performance on 3D semantic segmentation and 3D object detection on point clouds. Although a minimalistic framework with no bells and whistles already gives visually pleasing results (Figure 1), we also demonstrate the flexibility of SGPN as we boost performance even more by seamlessly integrating CNN features from RGBD images. 2. Related Works 2.1. Object Detection and Instance Segmentation Recent advances in object detection [37, 14, 24, 35, 36, 26, 13, 25] and instance segmentation [23, 10, 9, 30, 29] on 2D images have achieved promising results. R-CNN [15] for 2D object detection established a baseline system by introducing region proposals as candidate object regions. Faster R-CNN [37] leveraged a CNN learning scheme and proposed Region Proposal Networks(RPN). YOLO [35] divided the image into grids and each grid cell produced an object proposal. Many 2D instance segmentation approaches are based on segment proposals. DeepMask [29] learns to generate segment proposals each with a corresponding object score. Dai et al. [10] predict segment candidates from bounding box proposals. Mask R-CNN [18] extended Faster R-CNN by adding a branch on top of RPN to produce object masks for instance segmentation. Following these pioneering 2D works, 3D bounding box detection frameworks have emerged [38, 42, 43, 11, 5]. Song and Xiao [43] use a volumetric CNN to create 3D RPN on a voxelized 3D scene and then use both the color and depth data of the image in a joint 3D and 2D object recognition network on each proposal. Deng and Latecki [11] regress class-wise 3D bounding box models based on RGBD image appearance features only. Armeni et al [1] use a sliding shape method with CRF to perform 3D object detection on point cloud. To the best of our knowledge, no previous work exists that learns 3D instance segmentation D Deep Learning Convolutional neural networks generalize well to 3D by performing convolution on voxels for certain tasks such as object classification [32, 46, 27, 49, 39], shape reconstruction [47, 17, 8] of simple objects, and 3D object detection as mentioned in Section 2.1. However, volumetric representation carry a high memory and computational cost and have strong limitations dealing with 3D scenes [7, 1, 44]. Octree-based CNNs [39, 45, 46] have been introduced recently, but they are less flexible than volumetric CNNs and still suffer from memory efficiency problems. A point cloud is an intuitive, memory-efficient 3D representation well-suited for representing detailed, large scenes for 3D instance segmentation using deep learning. Point- Net/Pointnet++ [31, 33] recently introduce deep neural networks on 3D point clouds, learning successful results for tasks such as object classification and part and semantic scene segmentation. We base our network architecture off of PointNet/PointNet++, achieving a novel method that learns 3D instance segmentation on point clouds Similarity Metric Learning Our work is also closely related to similarity metric learning, which has been widely used in deep learning on various tasks such as person re-identification [50], matching [16], image retrival [12, 48] and face recognition [6]. Siamese CNNs [6, 41, 3] are used on tasks such as tracking [22] and one-shot learning [20] by measuring the similarity of two input images. Alejandro et. al [28] introduced an associative embedding method to group similar pixels for multi-person pose estimation and 2D instance segmentation by enforcing that pixels in the same group should have similar values in their embedding space without actually enforcing what those exact values should be. Our method exploits metric learning in a different way in that we regress the likelihood of two points belonging to the same group and formulate the similarity matrix as group proposals to handle variable number of instances. 3. Method The goal of this paper is to take a 3D point cloud as input and produce an object instance label for each point and
3 a class label for each instance. Utilizing recent developments in deep learning on point clouds [31, 33], we introduce a Similarity Group Proposal Network (SGPN), which consumes a 3D point cloud and outputs a set of instance proposals that each contain the group of points inside the instance as well as its class label. Section 3.1 introduces the design and properties of SGPN. Section 3.2 proposes an algorithm to merge similar groups and give each point an instance label. Section 3.3 gives implementation details. Figure 2 depicts the overview of our system Similarity Group Proposal Network SGPN is a very simple and intuitive framework. As shown in Figure 2, it first passes a point cloud P of size N p through a feed-forward feature extraction network inspired by PointNets [31, 33], learning both global and local features in the point cloud. This feature extraction network produces a matrix F. SGPN then diverges into three branches that each pass F through a single PointNet layer to obtain sized N p N f feature matrices F SIM, F CF, F SEM, which we respectively use to obtain a similarity matrix, a confidence map and a semantic segmentation map. The ith row in a N p N f feature matrix is a N f -dimensional vector that represents point P i in an embedded feature space. Our loss L is given by the sum of the losses from each of these three branches: L = L SIM + L CF + L SEM. Our network architecture can be found in the supplemental. Similarity Matrix We propose a novel similarity matrix S from which we can formulate group proposals to directly recover accurate instance segmentation results. S is of dimensions N p N p, and element S ij classifies whether or not points P i and P j belong to the same object instance. Each row of S can be viewed as a proposed grouping of points that form a candidate object instance. We leverage that points belonging to the same object instance should have similar features and lie very close together in feature space. We obtain S by, for each pair of points {P i, P j }, simply subtracting their corresponding feature vectors {F SIMi, F SIMj } and taking the L 2 norm such that S ij = F SIMi F SIMj 2. This reduces the problem of instance segmentation to learning an embedding space where points in the same instance are close together and those in different object instances are far apart. For a better understanding of how SGPN captures correlation between points, in Figure 3(a) we visualize the similarity (euclidean distance in feature space) between a given point and the rest of the points in the point cloud. Points in different instances have greater euclidean distances in feature space and thus smaller similarities even though they have the same semantic labels. For example, in the bottomright image of Figure 3(a), although the given table leg point has greater similarity with the other table leg points than the table top, it is still distinguishable from the other table leg. We believe that a similarity matrix is a more natural and simple representation for 3D instance segmentation on a point cloud compared to traditional 2D instance segmentation representations. Most state-of-the-art 2D deep learning methods for instance segmentation first localize the image into patches, which are then passed through a neural network and segment a binary mask of the object. While learning a binary mask in a bounding box is a more natural representation for space-centric structures such as images or volumetric grids where features are largely defined by which positions in a grid have strong signals, point clouds can be viewed as shape-centric structures where information is encoded by the relationship between the points in the cloud, so we would prefer to also define instance segmentation output by the relationship between points without working too much in grid space. Hence we expect that a deep neural network could better learn our similarity matrix, which compared to traditional representations is a more natural and straightforward representation for instance segmentation in a point cloud. Double-Hinge Loss for Similarity Matrix As is the case in [28], in our similarity matrix we do not need to precisely regress the exact values of our features; we only optimize the simpler objective that similar points should be close together in feature space. We define three potential similarity classes for each pair of points {P i, P j }: 1. P i and P j belong to the same object instance. 2. P i and P j share the same semantic class but do not belong to the same object instance. 3. P i and P j do not share the same semantic class. Pairs of points should lie progressively further away from each other in feature space as their similarity class increases. We define out loss as: N p L SIM = l(i, j) i F SIMi F SIMj 2 C ij = 1 l(i, j) = α max(0, K 1 F SIMi F SIMj 2 ) C ij = 2 max(0, K 2 F SIMi F SIMj 2 ) C ij = 3 where C ij indicates which of the similarity classes defined above does the pair of points ({P i, P j )} belong to and α, K 1, K 2 are constants such that α > 1, K 2 > K 1. Although the second and third similarity class are treated equivalently for the purposes of instance segmentation, distinguishing between them in L SIM using our double-hinge loss allows our similarity matrix output branch and our semantic segmentation output branch to mutually assist each N p j

 Confidence map. A darker color represents higher confidence. other for increased accuracy and convergence speed.")

 provides a visualization of the confidence map; points located in the boundary area between parts have lower confidence.")




, where freq(c) is the total number of points of class c divided by the total number of points in")
4 Input Points: Np x Nf PointNet / PointNet++ Features SGPN Pairwise Distance Np X Np Similarity Matrix Confidence Map Np x 1 Group Proposals Pruning Semantic Prediction Np x Nc Group class Group Merging Figure 2: Pipeline of our system for point cloud instance segmentation. (a) (b) Figure 3: (a) Similarity (euclidean distance in feature space) between a given point (indicated by red arrow) and the rest of points. A darker color represents lower distance in feature space thus higher similarity. (b) Confidence map. A darker color represents higher confidence. other for increased accuracy and convergence speed. Since the semantic segmentation network is actually wrongly trying to bring pairs of points in our second similarity class closer together in feature space, we also add an α > 1 term to increase the weight of our loss to dominate the gradient from the semantic segmentation output branch. At test time if S ij < T h S where T h S < K 1, then points pair P i and P j are in the same instance group. Similarity Confidence Network SGPN also feeds F CF through an additional PointNet layer to predict a N p 1 confidence map CM reflecting how confidently the model believes that each grouping candidate is indeed a correct object instance. Figure 3(b) provides a visualization of the confidence map; points located in the boundary area between parts have lower confidence. We regress confidence scores based on ground truth groups G represented as a N p N p matrix identical in form to our similarity matrix. If P i is a background point that does not belong to any object in the ground truth then the row G i will be all zeros. For each row in S i, we expect the ground-truth value in the confidence map CM i to be the intersection over union (IoU) between the set of points in the predicted group S i and the ground truth group G i. Our loss L CF is the L2 loss between the inferred and expected CM. Although the loss L CF depends on the similarity matrix output branch during training, at test time we run the branches in parallel and only groups with confidence greater than a threshold T h C are considered valid group proposals. Semantic Segmentation Map The semantic segmentation map acts as a point-wise classifier. SGPN passes F SEM Instance Segmentation through an additional PointNet layer whose architecture depends on the number of possible semantic classes, yielding the final output M SEM, which is a N p N C sized matrix where N C is the number of possible object categories. M SEMij corresponds to the probability that point P i belongs to class C j. The loss L SEM is a weighted sum of the cross entropy softmax loss for each row in the matrix. We use median frequency balancing [2] and the weight assigned to a category is ac = medianfreq/freq(c), where freq(c) is the total number of points of class c divided by the total number of points in samples where c is present, and medianfreq is the median of these freq(c). At test time, the class label for a group instance is assigned by calculating the mode of the semantic labels of the points in that group Group Proposal Merging The similarity matrix S produces N p group proposals, many of which are noisy or represent the same object. We first discard proposals with predicted confidence less than T h C or cardinality less than T h M2. We further prune our proposals into clean, non-overlapping object instances by applying Non-Maximum Suppression; groups with IoU greater than T h M1 are merged together by selecting the group with the maximum cardinality. Each point is then assigned to the group proposal that contains it. In the rare case ( 2%) that after the merging stage a point belongs to more than one final group proposal, this usually means that the point is at the boundary between two object instances, which means that the effectiveness of our network would be roughly the same regardless of which group proposal the point is assigned to. Hence, with minimal loss in accuracy we randomly assign the point to any one of the group proposals that contains it. We refer to this process as GroupMerging throughout the rest of the paper Implementation Details We use an ADAM [19] optimizer with initial learning rate , momentum 0.9 and batch size 4. The learning rate is divided by 2 every 20 epochs. The network is trained with only the L SIM loss for the first 5 epochs. In our experiment, α is set to 2 initially and is increased by 2 every 5 epochs. This design makes the network more focused on separating features of points that belong to different object
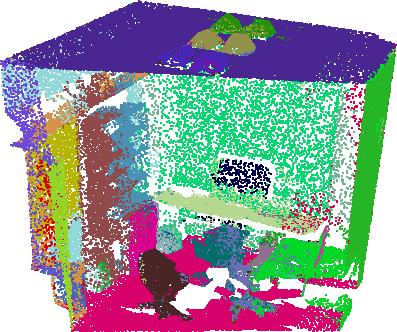
5 instances but have the same semantic labels. K 1, K 2 are set to 10 and 80, respectively. We use per-category histogram thresholding to get the threshold point T h s for each testing sample. T h M1 is set to 0.6 and T h M2 is set to 200. T h C is set to 0.1. Our network is implemented with Tensorflow and a single Nvidia GTX1080 Ti GPU. It takes hours to converge. At test time, SGPN takes 40ms on an input point cloud with size with PointNet++ as our baseline architecture. Further runtime analysis can be found in Section Experiments We evaluate SGPN on 3D instance segmentation on the following datasets: Stanford 3D Indoor Semantics Dataset (S3DIS) [1]: This dataset contains 3D scans in 6 areas including 271 rooms. The input is a complete point cloud generated from scans fused together from multiple views. Each point has semantic labels and instance annotations. NYUV2 [40]: Partial point clouds are generated from single view RGBD images. The dataset is annotated with 3D bounding boxes and 2D semantic segmentation masks. We use the improved annotation in [11]. Since both 3D bounding boxes and 2D segmentation masks annotations are given, ground truth 3D instance segmentation labels for point clouds can be easily generated We follow the standard split with 795 training images and 654 testing images. ShapeNet [4, 51] Part Segmentation: ShapeNet contains 16, 881 shapes annotated with 50 types of parts in total. Most object categories are labeled with two to five parts. We use the official split of 795 training samples and 654 testinn percentageg samples in our experiments. We also show the capability of SGPN to improve semantic segmentation and 3D object detection. To validate the flexibility of SGPN, we also seamlessly incorporate 2D CNN features into our network to boos performance on the NYUV2 dataset S3DIS Instance Segmentation and 3D Object Detection We perform experiments on Stanford 3D Indoor Semantic Dataset to evaluate our performance on large real scene scans. Following experimental settings in PointNet [31], points are uniformly sampled into blocks of area 1m 1m. Each point is labeled as one of 13 categories (chair, table, floor, wall, clutter etc.) and represented by a 9D vector (XYZ, RGB, and normalized location as to the room). At train time we uniformly sample 4096 points in each block, and at test time we use all points in the block as input. SGPN uses PointNet as its baseline architecture for this experiment. 1 Figure 5 shows instance segmentation results on S3DIS with SGPN. Different colors represent different instances. Point colors of the same group are not necessarily the same as their counterparts in the ground truth since object instances are unordered. To visualize instance classes, we also add semantic segmentation results. SGPN achieves good performance on various room types. We also compare instance segmentation performance with the following method (which we call Seg-Cluster): Perform semantic segmentation using our network and then select all points as seeds. Starting from a seed point, BFS is used to search neighboring points with the same label. If a cluster with more than 200 points has been found, it is viewed as a valid group. Our GroupMerging algorithm is then used to merge these valid groups. We calculate the IoU on points between each predicted and ground truth group. A detected instance is considered as true positive if the IoU score is greater than a threshold. The average precision (AP) is further calculated for instance segmentation performance evaluation. Table 1 shows the AP for every category with IoU threshold 0.5. To the best of our knowledge, there are no existing instance segmentation method on point clouds for arbitrary object categories, so we further demonstrate the capability of SGPN to handle various objects by adding the 3D detection results of Armeni et al. [1] on S3DIS to Table 1. The difference in evaluation metrics between our method and [1] is that the IoU threshold of [1] is 0.5 on a 3D bounding box and the IoU calculation of our method is on points. Despite this difference in metrics, we can still see our superior performance on both large and small objects. We see that a naive method like Seg-Cluster tends to properly separate regions far away for large objects like the ceiling and floor. However for small object, Seg-Cluster fails to segment instances with the same label if they are close to each other. Mean APs with different IoU thresholds (0.25, 0.5, 0.75) are also evaluated in Table 2. Figure 4 shows qualitative comparison results. Once we have instance segmentation results, we can compute the bounding box for every instance and thus produce 3D object detection predictions. In Table 3, we compare out method with the 3D object detection system introduced in PointNet [31], which to the best of our knowledge is the state-of-the-art method for 3D detection on S3DIS. Detection performance is evaluated over 4 categories AP with IoU threshold 0.5. The method introduced in PointNet clusters points given semantic segmentation results and uses a binary classifica- 1 PointNet [31] proposed a 3D detection system while PointNet++ [33] does not. To make fair comparison, we use PointNet as our baseline architecture for this experiment while using PointNet++ in Sections 4.2 and 4.3.
![Mean ceiling floor wall beam column window door table chair sofa bookcaseboard Armeni et al. [1] 49.93 71.61 88.70 72.86 66.67 91.77 25.92 54.11 46.02 16.15 6.78 54.71 3.91 Seg-Cluster 20.](/docs-images/82/86007822/images/6-0.jpg "39 43.58 35.52 16.64 12.59 15.90 23.86 15.75 22.63 10.33 3.92 43.33 10.71 SGPN 54.35 79.44 66.29 88.77 77.98 60.71 66.62 56.75 46.90 40.77 6.38 47.61 11.")


![28 Table 3: Comparison results on 3D detection in S3DIS scenes. SGPN uses PointNet as baseline. The metric is AP with IoU threshold 0.5. Mean IoU Accuracy PointNet [31] 49.76 79.66 SGPN 50.](/docs-images/82/86007822/images/6-3.jpg "37 80.78 Table 4: Results on semantic segmentation in S3DIS scenes. SGPN uses PointNet as baseline. Metric is mean IoU(%) over 13 classes (including clutter).")



 (b) (c) (d) (e) Figure 4: Comparison results on S3DIS.")
 Ground Truth for semantic segmentation. (e) Semantic Segmentation and 3D detection results of SGPN.")
![The color of the detected bounding box for each object category is the same as the semantic labels. In [34], 2D CNN features are combined 3D point cloud for RGBD semantic segmentation.](/docs-images/82/86007822/images/6-9.jpg "By leveraging the flexibility of SGPN, we also seamlessly integrate 2D CNN features from RGB images to boost performance.")

6 Mean ceiling floor wall beam column window door table chair sofa bookcaseboard Armeni et al. [1] Seg-Cluster SGPN Table 1: Results on instance segmentation in S3DIS scenes. The metric is AP(%) with IoU threshold 0.5. To the best of our knowledge, there are no existing instance segmentation methods on point clouds for arbitrary object categories. The result of Armeni et al. [1] is on 3D object detection and IoU is calculated on 3D bounding boxes, while Seg-Cluster and SGPN are on points. AP 0.25 AP 0.5 AP 0.75 Seg-Cluster SGPN Table 2: Comparison results on instance segmentation with different IoU thresholds in S3DIS scenes. Metric is mean AP(%) over 13 categories. Mean table chair sofa board PointNet [31] Seg-Cluster SGPN Table 3: Comparison results on 3D detection in S3DIS scenes. SGPN uses PointNet as baseline. The metric is AP with IoU threshold 0.5. Mean IoU Accuracy PointNet [31] SGPN Table 4: Results on semantic segmentation in S3DIS scenes. SGPN uses PointNet as baseline. Metric is mean IoU(%) over 13 classes (including clutter). tion network for each category to separate close objects with same categories. Our method outperforms it by a large margin, and unlike PointNet does not require an additional network, which unnecessarily introduces additional complexity during both train and test time and local minima during train time. SGPN can effectively separate the difficult cases of objects of the same semantic class but different instances (c.f. Figure 4) since points in different instances are far apart in feature space even though they have the same semantic label. We further compare our semantic segmentation results with PointNet in Table 4. SGPN outperforms its baseline with the help of its similarity matrix NYUV2 Object Detection and Instance Segmentation Evaluation We evaluate the effectiveness of our approach on partial 3D scans on the NYUV2 dataset. In this dataset, 3D point clouds are lifted from a single RGBD image. An image of size H W can produce H W points. We subsample this point cloud by resizing the image to H 4 W 4 and get the corresponding points using a nearest neighbor search. Both our training and testing experiments are conducted on such a point cloud. PointNet++ is used as our baseline. (a) (b) (c) (d) (e) Figure 4: Comparison results on S3DIS. (a) Ground Truth for instance segmentation. Different colors represents different instances. (b) SGPN instance segmentation results. (c) Seg-Cluster instance segmentation results. (d) Ground Truth for semantic segmentation. (e) Semantic Segmentation and 3D detection results of SGPN. The color of the detected bounding box for each object category is the same as the semantic labels. In [34], 2D CNN features are combined 3D point cloud for RGBD semantic segmentation. By leveraging the flexibility of SGPN, we also seamlessly integrate 2D CNN features from RGB images to boost performance. A 2D CNN consumes an RGBD map and extracts feature maps F 2 with size H 4 W 4 N F 2. Since there are H 4 W 4 sub-sampled points for every image, a feature vector of size N f2 can be extracted from F 2 at each pixel location. Every feature vector is concatenated to F (a N p N F feature matrix produced by PointNet/PointNet++ as mentioned in Section 3.1) for each corresponding point, yielding a feature map of size N P (N F + N F 2 ), which we then feed to our output branches. Figure 6 illustrates this procedure; we call this pipeline SGPN-CNN. In our experiments, we use a pre-trained AlexNet model [21] (with the first layer stride 1) and extract F 2 from the conv5 layer. We use H W = and N p = The 2D CNN and SGPN are trained jointly. Evaluation is performed on 19 object categories. Figure 7 shows qualitative results on instance segmentation of SGPN. Table 5 shows comparisons between Seg-Cluster




 (b) (c) (d) Figure 7: SGPN instance")
 Input point clouds.")
 Instance segmentation results with SGPN.")





 C1 37.55 35.55 36.")

 in NYUV2.")


![which makes the IoU much smaller than [43, 11].](/docs-images/82/86007822/images/7-17.jpg "C1 Input Image: HxW Mean Deep Sliding Shapes [43]")
![Deng and Latecki [11] SGPN SGPN-CNN N Similarity](/docs-images/82/86007822/images/7-18.jpg "Matrix Confidence Map Semantic Prediction Figure 6:")







7 Mean Seg-Cluster SGPN SGPN-CNN Table 5: Results on instance segmentation in NYUV2. The metric is AP with IoU (a) (b) (c) (d) Figure 7: SGPN instance segmentation results on NYUV2. (a) Input point clouds. (b) Ground truths for instance segmentation. (c) Instance segmentation results with SGPN. (d) Instance segmentation results with SGPN-CNN. Figure 5: SGPN instance segmentation results on S3DIS. The first row is the prediction results. The second row is groud truths. Different colors represent different instances. The third row is the predicted semantic segmentation results. The fourth row is the ground truths for semantic segmentation. 2DCNN CNN Feature Map CNN H/4 W/4 SGPN Sub-sample with stride 4 Concat N PointNet / PointNet++ C2 Input Points: Nx6 (N=HxW/16) C Table 6: Comparison results on 3D detection (AP with IoU 0.25) in NYUV2. Please note we use point groups as inference while [43, 11] use large bounding box with invisible regions as ground truth. Our prediction is the tight bounding box on points which makes the IoU much smaller than [43, 11]. C1 Input Image: HxW Mean Deep Sliding Shapes [43] Deng and Latecki [11] SGPN SGPN-CNN N Similarity Matrix Confidence Map Semantic Prediction Figure 6: Incorporating CNN features in SGPN. and our SGPN and CNN-SGPN frameworks on instance segmentation. The evaluation metric is average precision (AP) with IoU threshold The margin of improvement for SGPN compared to SegCluster is not as high as it is on S3DIS, because in this dataset objects with the same semantic label are usually far apart in Euclidean space. Additionally, naive methods like Seg-Cluster benefit since it is easy to separate a single instance into parts since the points are not connected due to occlusion in partial scanning. Table 5 also illustrates that SGPN can effectively utilize CNN features. Instead of concatenating fully-connected layer of 2D and 3D networks as in [43], we combine 2D and 3D features by considering their geometric relationships. We further calculate bounding boxes with instance segmentation results. Table 6 compares our work with the state-of-the-art works [43, 11] on NYUV2 3D object detection. Following the evaluation metric in [42], AP is calculated with IoU threshold 0.25 on 3D bounding boxes. The
![(a) (b) (c) Mean airplane bag cap car chair head skate guitar knife lamp laptopmotor mug pistol rocket phone board table [33] 84.6 80.4 80.9 60.0 76.8 88.1 83.7 90.2 82.6 76.9 94.7 68.0 91.2 82.1 59.](/docs-images/82/86007822/images/8-0.jpg "9 78.2 87.5 SGPN 85.8 80.4 78.6 78.8 71.5 88.6 78.0 90.9 83.0 78.8 95.8 77.8 93.8 87.4 60.1 92.3 89.4 Table 7: Semantic segmentation results on ShapeNet part dataset. Metric is mean IoU(%) on points.")
 Semantic segmentation results of PointNet++. (d) Semantic segmentation results of SGPN.")

![Our output is the derived tight bounding box around the grouped points in the partial scan, which makes our IoUs much smaller than [43, 11].](/docs-images/82/86007822/images/8-3.jpg "However, we can still see the effectiveness of SGPN on the task of 3D object detection on partial scans as our method achieves better performance on small objects.")
![Computation Speed To benchmark the testing time with [43, 11] and make fair comparison, we run our framework on an Nvidia K40 GPU. SGPN takes 170ms and around 400M GPU memory per sample.](/docs-images/82/86007822/images/8-4.jpg "CNN-SGPN takes 300ms and 1.4G GPU memory per sample. GroupMerging takes 180ms on an Intel i7 CPU. However, the detection net in [11] takes 739ms on an Nvidia Titan X GPU. In [43], RPN takes 5.")
![62s and ORN takes 13.93s per image on an Nvidia K40 GPU. Our model improves the efficiency and reduces GPU memory usage by a large margin. 4.3. ShapeNet Part Instance Segmentation Following the settings in [33], point clouds are generated by uniformly sampling shapes from Shapenet [4].](/docs-images/82/86007822/images/8-5.jpg "In our experiments we sample each shape into 2048 points. The XYZ of points are fed into network as input with size 2048 3.")
8 (a) (b) (c) Mean airplane bag cap car chair head skate guitar knife lamp laptopmotor mug pistol rocket phone board table [33] SGPN Table 7: Semantic segmentation results on ShapeNet part dataset. Metric is mean IoU(%) on points. (d) Figure 8: Qualitative results on ShapeNet Part Dataset. (a) Generated ground truth for instance segmentation. (b) SGPN instance segmentation results. (c) Semantic segmentation results of PointNet++. (d) Semantic segmentation results of SGPN. NYUV2 dataset provides ground truth 3D bounding boxes that encapsulate the whole object including the part that is invisible in the depth image. Both [43] and [11] use these large ground truth bounding boxes for inference. In our method, we infer point groupings, which lack information of the invisible part of the object. Our output is the derived tight bounding box around the grouped points in the partial scan, which makes our IoUs much smaller than [43, 11]. However, we can still see the effectiveness of SGPN on the task of 3D object detection on partial scans as our method achieves better performance on small objects. Computation Speed To benchmark the testing time with [43, 11] and make fair comparison, we run our framework on an Nvidia K40 GPU. SGPN takes 170ms and around 400M GPU memory per sample. CNN-SGPN takes 300ms and 1.4G GPU memory per sample. GroupMerging takes 180ms on an Intel i7 CPU. However, the detection net in [11] takes 739ms on an Nvidia Titan X GPU. In [43], RPN takes 5.62s and ORN takes 13.93s per image on an Nvidia K40 GPU. Our model improves the efficiency and reduces GPU memory usage by a large margin ShapeNet Part Instance Segmentation Following the settings in [33], point clouds are generated by uniformly sampling shapes from Shapenet [4]. In our experiments we sample each shape into 2048 points. The XYZ of points are fed into network as input with size To generate ground truth labels for part instance segmentation from semantic segmentation results, we perform DBSCAN clustering on each part category of an object to group points into instances. This experiment is conducted as a toy example to demonstrate the effectiveness of our approach on instance segmentation for pointclouds. We use Pointnet++ as our baseline. Figure 8(b) illustrates the instance segmentation results. For instance results, we again use different colors to represent different instances, and point colors of the same group are not necessarily the same as the ground truth. Since the generated ground truths are not real ground truths, only qualitative results are provided. SGPN achieves good results even under challenging conditions. As we can see from the Figure 8, SGPN is able to group the chair legs into four instances even though even in the ground truth DBSCAN can not separate the chair legs apart. The similarity matrix can also help the semantic segmentation branch training. We compare SGPN to PointNet++ (i.e. our framework with solely a semantic segmentation branch) on semantic segmentation in Table 7. The inputs of both networks are point clouds of size Evaluation metric is miou on points of each shape category. Our model performs better than PointNet++ due to the similarity matrix. Qualitative results are shown in Figure 8. Some false segmentation prediction is refined with the help of SGPN. 5. Conclusion We present SGPN, an intuitive, simple, and flexible framework for 3D instance segmentation on point clouds. With the introduction of the similarity matrix as our output representation, group proposals with class predictions can be easily generated from a single network. Experiments show that our algorithm can achieve good performance on instance segmentation for various 3D scenes and facilitate the tasks of 3D object detection and semantic segmentation. Future Work While a similarity matrix provides an intuitive representation and an easily defined loss function, one limitation of SGPN is that the size of the similarity matrix scales quadratically as N p increases. Thus, although much more memory efficient than volumetric methods, SGPN cannot process extremely large scenes on the order 10 5 or more points. Future research directions can consider generating groups using seeds that are selected based on SGPN to reduce the size of the similarity matrix. Currently trained in a fully supervised manner using a hinge loss, SGPN can also be extended in future works to learn in a more unsupervised setting or to learn more different kinds of data representations beyond instance segementation.

9 A. Network Architecture In our experiments, we use both PointNet and Point- Net++ as our baseline architectures. For the S3DIS dataset, we use PointNet as our baseline for fair comparison with the 3D object detection system described in the PointNet paper [31]. The network architecture is the same as the semantic segmentation network as stated in PointNet except for the last two layers. Our F is the last 1 1 conv layer with BatchNorm and ReLU in PointNet with 256 output channels. F SIM, F CF, F SEM are 1 1 conv layers with output channels (128, 128, 128), respectively. For the NYUV2 dataset, we use PointNet++ as our baseline. We use the same notations as PointNet++ to describe our architecture: SA(K, r, [l 1,..., l d ]) is a set abstraction (SA) level with K local regions of ball radius r using a PointNet architecture of d 1 1 conv layers with output channels l i (i = 1,..., d). F P (l 1,..., l d ) is a feature propagation (F P ) level with d 1 1 conv layers. Our network architecture is: SA(1024, 0.1, [32, 32, 64]), SA(256, 0.2, [64, 64, 128]), SA(128, 0.4, [128, 128, 256]), SA(64, 0.8, [256, 256, 256]), SA(16, 1.2, [256, 256, 512]), F P (512, 256), F P (256, 256), F P (256, 256), F P (256, 128), F P (128, 128, 128, 128). F SIM, F CF, F SEM are 1 1 conv layers with output channels (128, 128, 128) respectively. For our experiments on the ShapeNet part dataset, PointNet++ is used as our baseline. We use the same network architecture as in the PointNet++ paper [33]. F SIM, F CF, F SEM are 1 1 conv layers with output channels (64, 64, 64), respectively. B. Experiment Settings B.1. S3DIS Dataset Block Merging We divide each scene into 1m 1m blocks with overlapping sliding windows in a snake pattern of stride 0.5m as is shown in Figure 9. The entire scene is also divided into a grid V. V k is used to indicate the instance label of cell k where k [0, ). Given V and point instance labels for each block P L where P L ij represents the instance label of jth point in block i, a BlockMerging algorithm (refer Figure 9: view). Dividing scene into blocks with overlap (top Algorithm 1: BlockMeriging Input : V, P L Output: Point instance labels for the whole scene L 1 Initialize V with all elements 1; 2 GroupCount 0; 3 for every block i do 4 if i is the 1st block then 5 for every point P j in block i do 6 Define k where P j is located in the kth cell of V ; 7 V k P L 1j ; 8 end 9 else 10 for every instance I j in block i do 11 Define V Ij points in I j are located in cells V Ij ; 12 V t the cells in V Ij that do not have value 1; 13 if the frequency of the mode in V t < 30 then 14 V Ij GroupCount; 15 GroupCount GroupCount + 1; 16 else 17 V Ij the mode of V t ; 18 end 19 end 20 end 21 end 22 for every point P j in the whole scene do 23 Define k where P j is located in the kth cell of V ; 24 L j V k ; 25 end
10 Mean wall floor chair table desk bed book shelf sofa sink bath tub toilet door curtain counter window Seg-Cluster SGPN Table 8: Instance segmentation results on ScanNet. The metric is AP (%) with IoU threshold 0.5. We observe 0 percent AP on items that appear on the wall (door, window, picture) as they contain very little depth information and are almost all incorrectly semantically labeled as the wall. Future works can explore addressing this problem. shower curtain fridge picture cabinet to Algorithm 1) is derived to merge object instances from different blocks. In Figure 10, we show more qualitative results of instance segmentation with SGPN. C. More Experiments C.1. ScanNet We provide more experimental results on ScanNet [7]. This dataset contains 1513 scanned and reconstructed indoor scenes. We use the official split with 1201 scenes for training and 312 for testing. Following the same Block- Merging procedure, each scene is divided into 1.5m 1.5m blocks and each block is uniformly sampled into 4096 points for training. All points in the block are used at test time. Each point is represented by a 9D vector (XYZ, RGB, and normalized location with respect to the room scene). PointNet++ is used as the baseline. The network architecture is: SA(1024, 0.1, [32, 32, 64]), SA(256, 0.2, [64, 64, 128]), SA(64, 0.4, [128, 128, 256]), SA(16, 0.8, [256, 256, 512]), F P (256, 256), F P (256, 256), F P (256, 128), F P (128, 128, 128, 128). And F SIM, F CF, F SEM are 1 1 conv layers with output channels (128, 128, 128) respectively. Table 8 illustrates the quantitative comparison results with Seg-Cluster. The metric is average precision (AP) with IoU threshold 0.5. Figure 11 shows instance segmentation results on ScanNet. References [1] I. Armeni, O. Sener, A. R. Zamir, H. Jiang, I. Brilakis, M. Fischer, and S. Savarese. 3d semantic parsing of largescale indoor spaces. In CVPR, , 5, 6 [2] V. Badrinarayanan, A. Kendall, and R. Cipolla. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. TPAMI, [3] L. Bertinetto, J. Valmadre, J. F. Henriques, A. Vedaldi, and P. H. S. Torr. Fully-convolutional siamese networks for object tracking. In ECCV Workshops, [4] A. X. Chang, T. Funkhouser, L. Guibas, P. Hanrahan, Q. Huang, Z. Li, S. Savarese, M. Savva, S. Song, H. Su, et al. Shapenet: An information-rich 3d model repository. arxiv preprint arxiv: , , 5, 8 [5] X. Chen, H. Ma, J. Wan, B. Li, and T. Xia. Multi-view 3d object detection network for autonomous driving. In CVPR, [6] S. Chopra, R. Hadsell, and Y. LeCun. Learning a similarity metric discriminatively, with application to face verification. In CVPR, [7] A. Dai, A. X. Chang, M. Savva, M. Halber, T. Funkhouser, and M. Nießner. Scannet: Richly-annotated 3d reconstructions of indoor scenes. In CVPR, , 10 [8] A. Dai, C. R. Qi, and M. Nießner. Shape completion using 3d-encoder-predictor cnns and shape synthesis. In CVPR, [9] J. Dai, K. He, Y. Li, S. Ren, and J. Sun. Instance-sensitive fully convolutional networks. In ECCV, [10] J. Dai, K. He, and J. Sun. Instance-aware semantic segmentation via multi-task network cascades. In CVPR, , 2 [11] Z. Deng and L. J. Latecki. Amodal detection of 3d objects: Inferring 3d bounding boxes from 2d ones in rgb-depth images. In CVPR, , 2, 5, 7, 8 [12] A. Frome, Y. Singer, F. Sha, and J. Malik. Learning globallyconsistent local distance functions for shape-based image retrieval and classification. In ICCV, [13] C.-Y. Fu, W. Liu, A. Ranga, A. Tyagi, and A. C. Berg. Dssd: Deconvolutional single shot detector. arxiv preprint arxiv: , [14] R. Girshick. Fast r-cnn. In ICCV, [15] R. Girshick, J. Donahue, T. Darrell, and J. Malik. Rich feature hierarchies for accurate object detection and semantic segmentation. In CVPR, [16] X. Han, T. Leung, Y. Jia, R. Sukthankar, and A. C. Berg. Matchnet: Unifying feature and metric learning for patchbased matching. In CVPR, [17] X. Han, Z. Li, H. Huang, E. Kalogerakis, and Y. Yu. Highresolution shape completion using deep neural networks for global structure and local geometry inference. In ICCV, [18] K. He, G. Gkioxari, P. Dollar, and R. Girshick. Mask r-cnn. In ICCV, , 2








![the same. [19] D.](/docs-images/82/86007822/images/11-8.jpg "Kingma and J. Ba.")



![4 [20] G. Koch, R.](/docs-images/82/86007822/images/11-12.jpg "Zemel, and R.")




![2 [21] A.](/docs-images/82/86007822/images/11-17.jpg "Krizhevsky, I.")





11 Prediction Ground Truth Prediction Ground Truth Figure 10: Instance segmentation results on S3DIS with SGPN. Different colors represent different instances. The colors of the same object in ground truth and prediction are not necessarily the same. [19] D. Kingma and J. Ba. Adam: A method for stochastic optimization. arxiv preprint arxiv: , [20] G. Koch, R. Zemel, and R. Salakhutdinov. Siamese neural networks for one-shot image recognition. In ICML Deep Learning Workshop, [21] A. Krizhevsky, I. Sutskever, and G. E. Hinton. Imagenet classification with deep convolutional neural networks. In NIPS, [22] L. Leal-Taix, C. Canton-Ferrer, and K. Schindler. Learning by tracking: siamese cnn for robust target association. CVPR DeepVision Workshops, [23] Y. Li, H. Qi, J. Dai, X. Ji, and Y. Wei. Fully convolutional






![1, 2 [24] T.-Y. Lin, P.](/docs-images/82/86007822/images/12-6.jpg "Dollar, R. Girshick, K. He, B.")







12 Prediction Ground Truth Prediction Ground Truth Figure 11: Instance segmentation results on ScanNet with SGPN. Different colors represent different instances. The colors of the same object in ground truth and prediction are not necessarily the same. instance-aware semantic segmentation. In CVPR, , 2 [24] T.-Y. Lin, P. Dollar, R. Girshick, K. He, B. Hariharan, and S. Belongie. Feature pyramid networks for object detection. In CVPR, [25] T.-Y. Lin, P. Goyal, R. Girshick, K. He, and P. Dollar. Focal loss for dense object detection. In CVPR, [26] W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed, C.-Y. Fu, and A. C. Berg. SSD: Single shot multibox detector. In ECCV, [27] D. Maturana and S. Scherer. Voxnet: A 3d convolutional neural network for real-time object recognition. In IROS,
13 [28] A. Newell and J. Deng. Associative embedding: End-to-end learning for joint detection and grouping. In NIPS, , 3 [29] P. O. Pinheiro, R. Collobert, and P. Dollár. Learning to segment object candidates. In NIPS, , 2 [30] P. O. Pinheiro, T.-Y. Lin, R. Collobert, and P. Dollár. Learning to refine object segments. In ECCV, [31] C. R. Qi, H. Su, K. Mo, and L. J. Guibas. Pointnet: Deep learning on point sets for 3d classification and segmentation. CVPR, , 2, 3, 5, 6, 9 [32] C. R. Qi, H. Su, M. Nießner, A. Dai, M. Yan, and L. J. Guibas. Volumetric and multi-view cnns for object classification on 3d data. In CVPR, [33] C. R. Qi, L. Yi, H. Su, and L. J. Guibas. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. In NIPS, , 2, 3, 5, 8, 9 [34] X. Qi, R. Liao, J. Jia, S. Fidler, and R. Urtasun. 3d graph neural networks for rgbd semantic segmentation. In CVPR, [35] J. Redmon, S. Divvala, R. Girshick, and A. Farhadi. You only look once: Unified, real-time object detection. In CVPR, [36] J. Redmon and A. Farhadi. Yolo9000: Better, faster, stronger. In CVPR, [37] S. Ren, K. He, R. Girshick, and J. Sun. Faster r-cnn: Towards real-time object detection with region proposal networks. In NIPS, [38] Z. Ren and E. B. Sudderth. Three-dimensional object detection and layout prediction using clouds of oriented gradients. In CVPR, [39] G. Riegler, A. O. Ulusoy, and A. Geiger. Octnet: Learning deep 3d representations at high resolutions. In CVPR, [40] N. Silberman, D. Hoiem, P. Kohli, and R. Fergus. Indoor segmentation and support inference from rgbd images. ECCV, , 5 [41] E. Simo-Serra, E. Trulls, L. Ferraz, I. Kokkinos, P. Fua, and F. Moreno-Noguer. Discriminative learning of deep convolutional feature point descriptors. In ICCV, [42] S. Song and J. Xiao. Sliding shapes for 3d object detection in depth images. In ECCV, , 2, 7 [43] S. Song and J. Xiao. Deep Sliding Shapes for amodal 3D object detection in RGB-D images. In CVPR, , 2, 7, 8 [44] S. Song, F. Yu, A. Zeng, A. X. Chang, M. Savva, and T. Funkhouser. Semantic scene completion from a single depth image. arxiv preprint arxiv: , [45] M. Tatarchenko, A. Dosovitskiy, and T. Brox. Octree generating networks: Efficient convolutional architectures for high-resolution 3d outputs. In ICCV, [46] P.-S. Wang, Y. Liu, Y.-X. Guo, C.-Y. Sun, and X. Tong. O-cnn: Octree-based convolutional neural networks for 3d shape analysis. ACM Transactions on Graphics (TOG), [47] W. Wang, Q. Huang, S. You, C. Yang, and U. Neumann. Shape inpainting using 3d generative adversarial network and recurrent convolutional networks. In ICCV, [48] K. Q. Weinberger and L. K. Saul. Distance metric learning for large margin nearest neighbor classification. Journal of Machine Learning Research, [49] Z. Wu, S. Song, A. Khosla, F. Yu, L. Zhang, X. Tang, and J. Xiao. 3d shapenets: A deep representation for volumetric shapes. In CVPR, [50] D. Yi, Z. Lei, S. Liao, and S. Z. Li. Deep metric learning for person re-identification. In ICPR, [51] L. Yi, V. G. Kim, D. Ceylan, I. Shen, M. Yan, H. Su, A. Lu, Q. Huang, A. Sheffer, L. Guibas, et al. A scalable active framework for region annotation in 3d shape collections. ACM Transactions on Graphics (TOG),
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
arxiv: v1 [cs.cv] 13 Feb 2018
![arxiv: v1 [cs.cv] 13 Feb 2018](/thumbs/85/92549074.jpg "arxiv: v1 [cs.cv] 13 Feb 2018") Recurrent Slice Networks for 3D Segmentation on Point Clouds Qiangui Huang Weiyue Wang Ulrich Neumann University of Southern California Los Angeles, California {qianguih,weiyuewa,uneumann}@uscedu arxiv:180204402v1
Recurrent Slice Networks for 3D Segmentation on Point Clouds Qiangui Huang Weiyue Wang Ulrich Neumann University of Southern California Los Angeles, California {qianguih,weiyuewa,uneumann}@uscedu arxiv:180204402v1
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image. Supplementary Material
 Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/99052786.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
3D Object Detection with Latent Support Surfaces
 3D Object Detection with Latent Support Surfaces Zhile Ren Brown University ren@cs.brown.edu Erik B. Sudderth University of California, Irvine sudderth@uci.edu Abstract We develop a 3D object detection
3D Object Detection with Latent Support Surfaces Zhile Ren Brown University ren@cs.brown.edu Erik B. Sudderth University of California, Irvine sudderth@uci.edu Abstract We develop a 3D object detection
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
3D Deep Learning on Geometric Forms. Hao Su
 3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
arxiv: v1 [cs.cv] 8 Dec 2018
![arxiv: v1 [cs.cv] 8 Dec 2018](/thumbs/95/124182897.jpg "arxiv: v1 [cs.cv] 8 Dec 2018") GSPN: Generative Shape Proposal for 3D Instance Segmentation in Point Cloud arxiv:1812.03320v1 [cs.cv] 8 Dec 2018 Li Yi1 Wang Zhao2 He Wang1 1 Stanford University Minhyuk Sung1 Leonidas Guibas1 Tsinghua
GSPN: Generative Shape Proposal for 3D Instance Segmentation in Point Cloud arxiv:1812.03320v1 [cs.cv] 8 Dec 2018 Li Yi1 Wang Zhao2 He Wang1 1 Stanford University Minhyuk Sung1 Leonidas Guibas1 Tsinghua
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
POINT CLOUD DEEP LEARNING
 POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Feature-Fused SSD: Fast Detection for Small Objects
 Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks
 Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Zelun Luo Department of Computer Science Stanford University zelunluo@stanford.edu Te-Lin Wu Department of
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Zelun Luo Department of Computer Science Stanford University zelunluo@stanford.edu Te-Lin Wu Department of
Cascade Region Regression for Robust Object Detection
 Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
arxiv: v1 [cs.cv] 30 Sep 2018
![arxiv: v1 [cs.cv] 30 Sep 2018](/thumbs/89/99613806.jpg "arxiv: v1 [cs.cv] 30 Sep 2018") 3D-PSRNet: Part Segmented 3D Point Cloud Reconstruction From a Single Image Priyanka Mandikal, Navaneet K L, and R. Venkatesh Babu arxiv:1810.00461v1 [cs.cv] 30 Sep 2018 Indian Institute of Science, Bangalore,
3D-PSRNet: Part Segmented 3D Point Cloud Reconstruction From a Single Image Priyanka Mandikal, Navaneet K L, and R. Venkatesh Babu arxiv:1810.00461v1 [cs.cv] 30 Sep 2018 Indian Institute of Science, Bangalore,
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Pedestrian Detection based on Deep Fusion Network using Feature Correlation
 Pedestrian Detection based on Deep Fusion Network using Feature Correlation Yongwoo Lee, Toan Duc Bui and Jitae Shin School of Electronic and Electrical Engineering, Sungkyunkwan University, Suwon, South
Pedestrian Detection based on Deep Fusion Network using Feature Correlation Yongwoo Lee, Toan Duc Bui and Jitae Shin School of Electronic and Electrical Engineering, Sungkyunkwan University, Suwon, South
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
Depth-aware CNN for RGB-D Segmentation
 Depth-aware CNN for RGB-D Segmentation Weiyue Wang [0000 0002 8114 8271] and Ulrich Neumann University of Southern California, Los Angeles, California {weiyuewa,uneumann}@usc.edu Abstract. Convolutional
Depth-aware CNN for RGB-D Segmentation Weiyue Wang [0000 0002 8114 8271] and Ulrich Neumann University of Southern California, Los Angeles, California {weiyuewa,uneumann}@usc.edu Abstract. Convolutional
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
arxiv: v1 [cs.cv] 28 Mar 2018
![arxiv: v1 [cs.cv] 28 Mar 2018](/thumbs/86/94008018.jpg "arxiv: v1 [cs.cv] 28 Mar 2018") arxiv:1803.10409v1 [cs.cv] 28 Mar 2018 3DMV: Joint 3D-Multi-View Prediction for 3D Semantic Scene Segmentation Angela Dai 1 Matthias Nießner 2 1 Stanford University 2 Technical University of Munich Fig.
arxiv:1803.10409v1 [cs.cv] 28 Mar 2018 3DMV: Joint 3D-Multi-View Prediction for 3D Semantic Scene Segmentation Angela Dai 1 Matthias Nießner 2 1 Stanford University 2 Technical University of Munich Fig.
arxiv: v1 [cs.cv] 9 Aug 2017
![arxiv: v1 [cs.cv] 9 Aug 2017](/thumbs/78/78708739.jpg "arxiv: v1 [cs.cv] 9 Aug 2017") BlitzNet: A Real-Time Deep Network for Scene Understanding Nikita Dvornik Konstantin Shmelkov Julien Mairal Cordelia Schmid Inria arxiv:1708.02813v1 [cs.cv] 9 Aug 2017 Abstract Real-time scene understanding
BlitzNet: A Real-Time Deep Network for Scene Understanding Nikita Dvornik Konstantin Shmelkov Julien Mairal Cordelia Schmid Inria arxiv:1708.02813v1 [cs.cv] 9 Aug 2017 Abstract Real-time scene understanding
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
arxiv: v1 [cs.cv] 2 Sep 2018
![arxiv: v1 [cs.cv] 2 Sep 2018](/thumbs/85/92128474.jpg "arxiv: v1 [cs.cv] 2 Sep 2018") Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
arxiv: v1 [cs.cv] 6 Jul 2016
![arxiv: v1 [cs.cv] 6 Jul 2016](/thumbs/80/81416563.jpg "arxiv: v1 [cs.cv] 6 Jul 2016") arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network
 Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Cross-domain Deep Encoding for 3D Voxels and 2D Images
 Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
LSTM and its variants for visual recognition. Xiaodan Liang Sun Yat-sen University
 LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
Computer Vision Lecture 16
 Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
 PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
CS468: 3D Deep Learning on Point Cloud Data. class label part label. Hao Su. image. May 10, 2017
 CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Fully Convolutional Network for Depth Estimation and Semantic Segmentation
 Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation
 Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation Md Atiqur Rahman and Yang Wang Department of Computer Science, University of Manitoba, Canada {atique, ywang}@cs.umanitoba.ca
Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation Md Atiqur Rahman and Yang Wang Department of Computer Science, University of Manitoba, Canada {atique, ywang}@cs.umanitoba.ca
3D Scene Understanding from RGB-D Images. Thomas Funkhouser
 3D Scene Understanding from RGB-D Images Thomas Funkhouser Recent Ph.D. Student Current Postdocs Current Ph.D. Students Disclaimer: I am talking about the work of these people Shuran Song Yinda Zhang Andy
3D Scene Understanding from RGB-D Images Thomas Funkhouser Recent Ph.D. Student Current Postdocs Current Ph.D. Students Disclaimer: I am talking about the work of these people Shuran Song Yinda Zhang Andy
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Amodal and Panoptic Segmentation. Stephanie Liu, Andrew Zhou
 Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Indoor Object Recognition of 3D Kinect Dataset with RNNs
 Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Learning to Segment Object Candidates
 Learning to Segment Object Candidates Pedro Pinheiro, Ronan Collobert and Piotr Dollar Presented by - Sivaraman, Kalpathy Sitaraman, M.S. in Computer Science, University of Virginia Facebook Artificial
Learning to Segment Object Candidates Pedro Pinheiro, Ronan Collobert and Piotr Dollar Presented by - Sivaraman, Kalpathy Sitaraman, M.S. in Computer Science, University of Virginia Facebook Artificial
arxiv: v1 [cs.cv] 5 Oct 2015
![arxiv: v1 [cs.cv] 5 Oct 2015](/thumbs/71/66021937.jpg "arxiv: v1 [cs.cv] 5 Oct 2015") Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Detecting and Parsing of Visual Objects: Humans and Animals. Alan Yuille (UCLA)
") Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Deconvolutions in Convolutional Neural Networks
 Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Pixel Offset Regression (POR) for Single-shot Instance Segmentation
 for Single-shot Instance Segmentation") Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
From 3D descriptors to monocular 6D pose: what have we learned?
 ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
CS6501: Deep Learning for Visual Recognition. Object Detection I: RCNN, Fast-RCNN, Faster-RCNN
 CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
arxiv: v1 [cs.cv] 19 Mar 2018
![arxiv: v1 [cs.cv] 19 Mar 2018](/thumbs/78/77646221.jpg "arxiv: v1 [cs.cv] 19 Mar 2018") arxiv:1803.07066v1 [cs.cv] 19 Mar 2018 Learning Region Features for Object Detection Jiayuan Gu 1, Han Hu 2, Liwei Wang 1, Yichen Wei 2 and Jifeng Dai 2 1 Key Laboratory of Machine Perception, School of
arxiv:1803.07066v1 [cs.cv] 19 Mar 2018 Learning Region Features for Object Detection Jiayuan Gu 1, Han Hu 2, Liwei Wang 1, Yichen Wei 2 and Jifeng Dai 2 1 Key Laboratory of Machine Perception, School of
Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos
 Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos Kihyuk Sohn 1 Sifei Liu 2 Guangyu Zhong 3 Xiang Yu 1 Ming-Hsuan Yang 2 Manmohan Chandraker 1,4 1 NEC Labs
Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos Kihyuk Sohn 1 Sifei Liu 2 Guangyu Zhong 3 Xiang Yu 1 Ming-Hsuan Yang 2 Manmohan Chandraker 1,4 1 NEC Labs
Deep Neural Networks:
 Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
arxiv: v4 [cs.cv] 29 Mar 2019
![arxiv: v4 [cs.cv] 29 Mar 2019](/thumbs/96/128038877.jpg "arxiv: v4 [cs.cv] 29 Mar 2019") PartNet: A Recursive Part Decomposition Network for Fine-grained and Hierarchical Shape Segmentation Fenggen Yu 1 Kun Liu 1 * Yan Zhang 1 Chenyang Zhu 2 Kai Xu 2 1 Nanjing University 2 National University
PartNet: A Recursive Part Decomposition Network for Fine-grained and Hierarchical Shape Segmentation Fenggen Yu 1 Kun Liu 1 * Yan Zhang 1 Chenyang Zhu 2 Kai Xu 2 1 Nanjing University 2 National University
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas
 PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
Deep Learning on Point Sets for 3D Classification and Segmentation
 Deep Learning on Point Sets for 3D Classification and Segmentation Charles Ruizhongtai Qi Stanford University rqi@stanford.edu Abstract Point cloud is an important type of geometric data structure. Due
Deep Learning on Point Sets for 3D Classification and Segmentation Charles Ruizhongtai Qi Stanford University rqi@stanford.edu Abstract Point cloud is an important type of geometric data structure. Due
3D Shape Segmentation with Projective Convolutional Networks
 3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
3 Object Detection. BVM 2018 Tutorial: Advanced Deep Learning Methods. Paul F. Jaeger, Division of Medical Image Computing
 3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm
 CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
Automatic detection of books based on Faster R-CNN
 Automatic detection of books based on Faster R-CNN Beibei Zhu, Xiaoyu Wu, Lei Yang, Yinghua Shen School of Information Engineering, Communication University of China Beijing, China e-mail: zhubeibei@cuc.edu.cn,
Automatic detection of books based on Faster R-CNN Beibei Zhu, Xiaoyu Wu, Lei Yang, Yinghua Shen School of Information Engineering, Communication University of China Beijing, China e-mail: zhubeibei@cuc.edu.cn,
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models
 One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex