Depth Learning: When Depth Estimation Meets Deep Learning
|
|
|
- Joella Gordon
- 5 years ago
- Views:
Transcription

1 Depth Learning: When Depth Estimation Meets Deep Learning Prof. Liang LIN SenseTime Research & Sun Yat-sen University NITRE, June 18, 2018
2 Outline Part 1. Introduction Motivation Stereo Matching Single Image Depth Estimation Part 2. Depth Learning Our Progress Part 3. Cascade Residual Learning (CRL) Zoom and Learn (ZOLE) Single View Stereo Matching (SVS) Conclusion 2
3 Outline Part 1. Introduction Motivation Stereo Matching Single Image Depth Estimation Part 2. Depth Learning Our Progress Part 3. Cascade Residual Learning (CRL) Zoom and Learn (ZOLE) Single View Stereo Matching (SVS) Conclusion 3

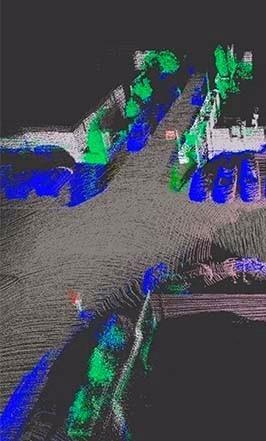



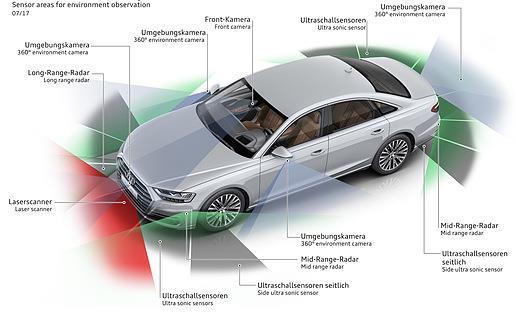
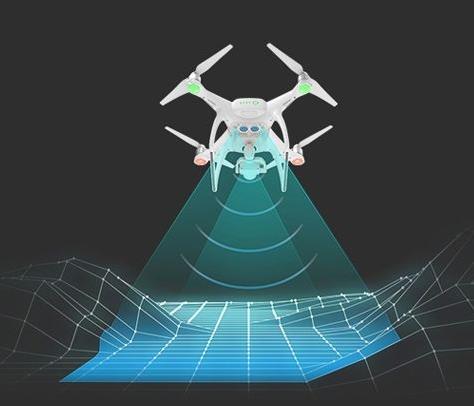

4 Motivation Importance of Depth ADAS Depth-of-field Rendering (Bokeh) Face ID AR / VR Industrial Automation Obstacle avoidance Entertainment 3D Reconstruction 4
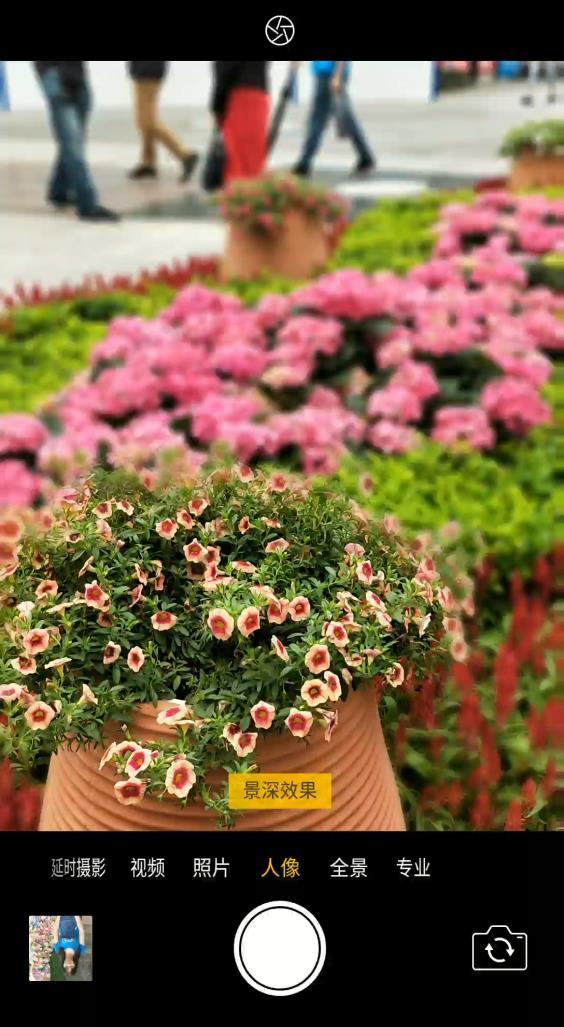
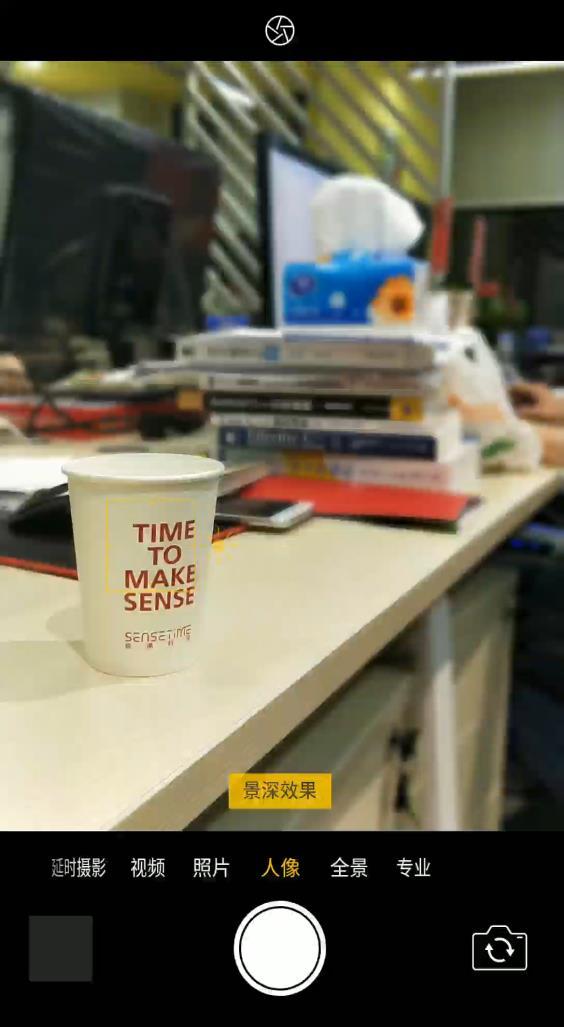
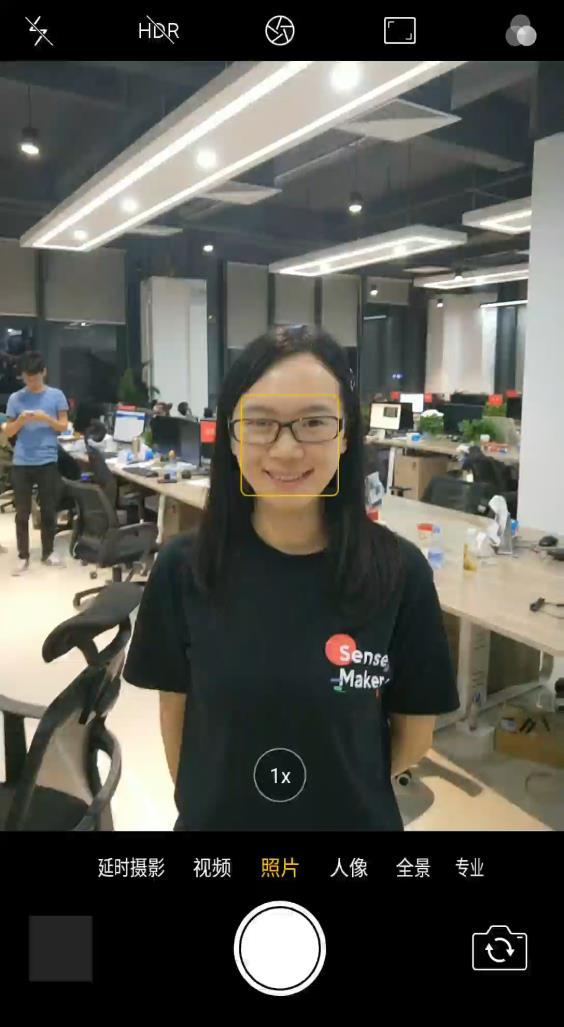



5 Application: Bokeh in mobile phone 景物虚化效果 Object Bokeh 视频重对焦 Video Refocus 人脸对焦跟随 Face Tracking 5

6 Applications: AR & Vide Editing 6



7 Motivation Depth Estimation Multiple ways to estimate depth Time of flight Structure light Stereo matching Most cost-effective approaches Main focus of this talk Structure from motion Single Image Depth Estimation 7
8 Outline Part 1. Introduction Motivation Stereo Matching Single Image Depth Estimation Part 2. Depth Learning Our Progress Part 3. Cascade Residual Learning (CRL) Zoom and Learn (ZOLE) Single View Stereo Matching (SVS) Conclusion 8


9 Stereo Matching X Estimate pixel correspondence in rectified pairs Disparity Map Depth Map f x l z x r C b C f Left image Right image Disparity Map [1] D. Scharstein and R. Szeliski, A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms,. International Journal of Computer Vision, 47(1-3):7 42,





10 Stereo Matching Challenges Underdetermined (ill-posed) Photometric variations Occlusions Texture-less Areas Repetitive patterns Reflections 10

11 Stereo Matching Classic Pipeline Typical method: Semi-Global Matching (SGM) Matching cost computation Compute 3D cost volume along horizontal scanline Cost Aggregation Left img Refine matching cost by aggregating information of neighboring pixels SGBM Disparity Computation Derive the disparity from the matching cost Disparity Refinement Post-processing on the disparity map [2] H. Hirschmuller, Stereo processing by semiglobal matching and mutual information, IEEE Trans. on pattern analysis and machine intelligence, Erroneous at ill-posed region! 11 Error

12 Stereo Matching Meets Deep Learning (I) Matching cost learning Train a model to classify patches into two classes (similar and not similar) A small set of image pairs with ground-truth disparities generate millions of patches Depend on the performance of SGM Cost Volume CNN SGM Overall pipeline [3] J. Zbontar and Y. LeCun. Stereo matching by training a convolutional neural network to compare image patches. Journal of Machine Learning Research, CNN Architecture of [3] 12

13 Stereo Matching Meets Deep Learning (II) End-to-end Learning Train an end-to-end model to regress disparity A large-scale dataset is needed to train a good model Usually via hourglass structure Variations: Correlation layer to compute cost volume, e.g., DispNetC [4] Unsupervised learning with left-right check, e.g., [5] CNN Overall pipeline [4] N. Mayer, et al,. "A large dataset to train convolutional networks for disparity, optical flow, and scene flow estimation." In Proc. IEEE CVPR, [5] C. Zhou, H. Zhang, X. Shen, and J. Jia. "Unsupervised Learning of Stereo Matching." In Proc. IEEE CVPR,
14 Outline Part 1. Introduction Motivation Stereo Matching Single Image Depth Estimation Part 2. Depth Learning Our Progress Part 3. Cascade Residual Learning (CRL) Zoom and Learn (ZOLE) Single View Stereo Matching (SVS) Conclusion 14


15 Single Image Depth Estimation Estimate depth from a single image Monocular depth estimation: Highly-ill posed, infinite configurations Deep learning to rescue! Needs semantic info to understand the scene 15


16 Single Image Depth Estimation Meets DL (I) Direct regression with CNN Train a model end-to-end to regress scene depth directly, e.g., [6] Issue: generalization, requires lots of data Img Coarse Fine GT [6] D. Eigen, C. Puhrsch, R. Fergus "Depth map prediction from a single image using a multi-scale deep network." In Proc. NIPS, pp ,


![consistency and depth smoothness [7] C. Godard, O. Mac Aodha, G.J.](/docs-images/89/98907797/images/17-3.jpg "Brostow\"Unsupervised monocular depth estimation with left-right")

17 Single Image Depth Estimation Meets DL (II) Semi-supervised/Unsupervised schemes Use stereo pairs for training Based on left-right consistency and smoothness of depth Input Output Depth [8] defines a series of loss functions based on left-right consistency and depth smoothness [7] C. Godard, O. Mac Aodha, G.J. Brostow"Unsupervised monocular depth estimation with left-right consistency," In Proc. CVPR, [8] Y Kuznietsov, J Stückler and L. Bastian, "Semi-supervised deep learning for monocular depth map prediction," In Proc. CVPR,
![Single Image Depth Estimation Meets DL (III) CNN with expressive modeling Integrate geometric models (e.g., [9]) or image models (e.](/docs-images/89/98907797/images/18-1.jpg "g., CRF, [10]) into CNN [9] classifies pixels into planes and edges, enforce two points on the same plane have same normal [9] P.")
![Wang, et al., "SURGE: surface regularized geometry estimation from a single image," In Proc. NIPS, pp. 172-180, 2016. [10] F.](/docs-images/89/98907797/images/18-2.jpg "Liu, et al., \"Deep convolutional neural fields for depth estimation from a single imag,.\" In Proc. CVPR, pp. 5162-5170, 2015. 18")
18 Single Image Depth Estimation Meets DL (III) CNN with expressive modeling Integrate geometric models (e.g., [9]) or image models (e.g., CRF, [10]) into CNN [9] classifies pixels into planes and edges, enforce two points on the same plane have same normal [9] P. Wang, et al., "SURGE: surface regularized geometry estimation from a single image," In Proc. NIPS, pp , [10] F. Liu, et al., "Deep convolutional neural fields for depth estimation from a single imag,." In Proc. CVPR, pp ,
19 Part 2. Depth Learning Our Progress 19
20 Outline Part 1. Introduction Motivation Stereo Matching Single Image Depth Estimation Part 2. Depth Learning Our Progress Part 3. Cascade Residual Learning (CRL) Zoom and Learn (ZOLE) Single View Stereo Matching (SVS) Conclusion 20
21 ICCVW 2017 Cascade Residual Learning: A Two-stage Convolutional Neural Network for Stereo Matching Jiahao Pang, Wenxiu Sun, Jimmy Ren, Chengxi Yang and Yan Qiong, SenseTime Research [11] J. Pang, et al., "Cascade residual learning: A two-stage convolutional neural network for stereo matching," In Proc. ICCV Workshop,
22 Cascade Residual Learning (I) Cascade residual networks for accurate disparity estimation Two-stage disparity estimation: DispFulNet: Resembles DispNet, use extra deconvolution modules to obtain full resolution output DispResNet: Inspired by ResNet, the second stage learns the residual signals across multiple scales 22

23 Cascade Residual Learning (II) Ranked 1 st on KITTI Stereo 2015 from Mar Sept
")
24 Cascade Residual Learning (III) Left img Ground-truth MC-CNN DispNetC CRL (Ours) 24
25 Outline Part 1. Introduction Motivation Stereo Matching Single Image Depth Estimation Part 2. Depth Learning Our Progress Part 3. Cascade Residual Learning (CRL) Zoom and Learn (ZOLE) Single View Stereo Matching (SVS) Conclusion 25
 [12] J. Pang, et al.")
26 CVPR 2018 Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1, Wenxiu Sun 1, Chengxi Yang 1, Jimmy Ren 1, Ruichao Xiao 1, Jin Zeng 1, Liang Lin 1,2 1 SenseTime Research, 2 Sun Yat-sen University Input Competing Methods ZOLE (Ours) [12] J. Pang, et al., "Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains," CVPR 2018.



27 Zoom and Learn Motivation Great results on pre-trained synthetic dataset Source domain Directly apply model to a new domain brings horrible results Target domain However 27
28 Zoom and Learn Method (I) Finetuning in the target domain? No, hard to collect ground-truth depth in new domain, e.g. bokeh Our solution: a self-adaptation approach Synthetic data, with ground-truth Stereo pairs in new domain, no ground-truth Key observation: up-sampled stereo pair leads to disparity map with extra details Stereo matching CNN parameterized by, stereo pair, consider two schemes Scheme A Scheme B 28

29 Zoom and Learn Method (II) Scheme B brings more details Scheme A L R Scheme B L R Zoom-in L R D D D Zoom-out 29


30 Zoom and Learn Method (III) However A bigger r does not necessarily mean better results Performance first improves then deteriorates Results of DispNetC on KITTI 2015 Analysis Up-sampling means perform stereo matching at subpixel accuracy Larger input translates to smaller receptive field Strategy Let the CNN learn its own higher-res details Graph Laplacian regularization to keep desired edges while smoothing out artifacts 30

31 Zoom and Learn Method (IV) Minimize graph Laplacian regularizer: widely used for image restoration : Graph Laplacian matrix Bigger weights, higher similarity of pixels and, force close to Graph Laplacian regularization simple & perform well on many restoration problems Denoising Super-resolution Deblurring Dequantization of JPEG images Bit-depth enhancement We integrate it as a loss function in our work Graph of a patch, (may not be a grid graph) [13] J. Pang and G. Cheung, Graph Laplacian regularization for image denoising: Analysis in the continuous domain, IEEE Trans. Image Process,
32 Zoom and Learn Method (V) Settings : init stereo network pre-trained with synthetic data, : model parameter stereo pairs The first The rest for training pairs are real stereo pairs of the target domain, no ground-truth pairs are synthetic data, they have ground truth disparities We solve for a new set of model parameter at iter. First create a set of pseudo ``ground-truths'' for the real stereo pairs by zooming (up-sampling), we divide a disparity map into square patches Matrix extracting the -th patch from is denoted as, 32
33 Zoom and Learn Method (VI) Formulation Data term: drives to be similar to Smoothness term: graph Laplacian regularization Feasibility: a stereo model works well for the target domain should perform reasonably on the synthetic data graph Laplacian are pre-computed, based on the left image and the predictions In practice, we resolve the optimization with stochastic gradient descent 33

 [14] A.")

34 Zoom and Learn Results (I) Refer to our paper for the detailed setting Left img Tonioni et al. [14] DispNetC ZOLE (Ours) [14] A. Tonioni, M. Poggi, S. Mattoccia, and L. Di Stefano. Unsupervised adaptation for deep stereo, In IEEE ICCV, Oct
 Refer")


35 Zoom and Learn Results (II) Refer to our paper for detailed setting Input Tonioni et al. DispNetC ZOLE (Ours) 35
36 Outline Part 1. Introduction Motivation Stereo Matching Single Image Depth Estimation Part 2. Depth Learning Our Progress Part 3. Cascade Residual Learning (CRL) Zoom and Learn (ZOLE) Single View Stereo Matching (SVS) Conclusion 36

37 CVPR 2018 Spotlight Single View Stereo Matching Yue Luo 1, Jimmy Ren 1, Mude Lin 1,2, Jiahao Pang 1, Wenxiu Sun 1, Hongsheng Li 3, Liang Lin 1,2 1 SenseTime Research, 2 Sun Yat-sen University, 3 CUHK [15] Y. Luo, J. Ren, M. Lin, J. Pang, W. Sun, H. Li, L. Lin, Single view stereo matching, CVPR (Spotlight) 37
38 Single View Stereo Matching Method (I) Decomposed into two stages: view synthesis & stereo matching View synthesis network: based on Deep3D [16] Formulate the left-to-right transformation with differentiable selection module Stereo matching network: based on DispFulNet of our CRL View synthesis network Stereo matching network [16] J Xie, R Girshick, A Farhadi, Deep3D: Fully automatic 2d-to-3d video conversion with deep convolutional neural networks, ECCV 2016.

39 Single View Stereo Matching Method (II) Benefits Explicitly encode the geometric transformation within individual networks to better solve the problem Demand on labelled depth data is greatly alleviated View synthesis network Stereo matching network 39
 Input")
 SVS")

40 Single View Stereo Matching Results (I) Input Gordard et al. [7] OCV-BM (Stereo) SVS (Ours) Ours produce sharp edges Outperforms stereo block matching method! 40
 Qualitative results on KITTI")
")
 using the model trained on")
41 Single View Stereo Matching Results (I) Qualitative results on KITTI Eigen test set Qualitative results on Make3D dataset (top two rows) and Cityscapes dataset (bottom two rows) using the model trained on KITTI 41
")
42 Single View Stereo Matching Results (II) 42
43 Conclusion Part 1. Introduction Motivation Stereo Matching Single Image Depth Estimation Part 2. Depth Learning Our Progress Part 3. Cascade Residual Learning (CRL) Zoom and Learn (ZOLE) Single View Stereo Matching (SVS) Conclusion 43
44 Part 3. Conclusion 44
45 Conclusion Depth estimation is important in many areas Deep learning brings a new era for depth estimation Pure data-driven approach can be fragile (e.g., single image depth estimation) Combine data-driven approaches and model-based approaches is a new trend Welcome to SenseTime to MAKE IT HAPPEN! 45


46 About Our Team: Image Restoration and Enhancement Depth estimation, computational photography, image processing on smartphones Our bokeh solution on recently launched VIVO V9 3D relighting on smartphones Get involve! Internship and full-time employee are welcome Location: Hong Kong, Shenzhen, Beijing, Shanghai, etc 46
47 Thank You! Q & A NITRE, June 18, 2018
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
arxiv: v2 [cs.cv] 9 Mar 2018
![arxiv: v2 [cs.cv] 9 Mar 2018](/thumbs/80/82468949.jpg "arxiv: v2 [cs.cv] 9 Mar 2018") Single View Stereo Matching Yue Luo 1 Jimmy Ren 1 Mude Lin 1 Jiahao Pang 1 Wenxiu Sun 1 Hongsheng Li 2 Liang Lin 1,3 arxiv:1803.02612v2 [cs.cv] 9 Mar 2018 1 SenseTime Research 2 The Chinese University
Single View Stereo Matching Yue Luo 1 Jimmy Ren 1 Mude Lin 1 Jiahao Pang 1 Wenxiu Sun 1 Hongsheng Li 2 Liang Lin 1,3 arxiv:1803.02612v2 [cs.cv] 9 Mar 2018 1 SenseTime Research 2 The Chinese University
EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES
 EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES J. Liu 1, S. Ji 1,*, C. Zhang 1, Z. Qin 1 1 School of Remote Sensing and Information Engineering, Wuhan University,
EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES J. Liu 1, S. Ji 1,*, C. Zhang 1, Z. Qin 1 1 School of Remote Sensing and Information Engineering, Wuhan University,
Cascade Residual Learning: A Two-stage Convolutional Neural Network for Stereo Matching
 Cascade Residual Learning: A Two-stage Convolutional Neural Network for Stereo Matching Jiahao Pang Wenxiu Sun Jimmy SJ. Ren Chengxi Yang Qiong Yan SenseTime Group Limited {pangjiahao, sunwenxiu, rensijie,
Cascade Residual Learning: A Two-stage Convolutional Neural Network for Stereo Matching Jiahao Pang Wenxiu Sun Jimmy SJ. Ren Chengxi Yang Qiong Yan SenseTime Group Limited {pangjiahao, sunwenxiu, rensijie,
Monocular Depth Estimation with Ainity, Vertical Pooling, and Label Enhancement
 Monocular Depth Estimation with Ainity, Vertical Pooling, and Label Enhancement Yukang Gan 1,2, Xiangyu Xu 1,3, Wenxiu Sun 1, and Liang Lin 1,2 1 SenseTime 2 Sun Yat-sen University 3 Tsinghua University
Monocular Depth Estimation with Ainity, Vertical Pooling, and Label Enhancement Yukang Gan 1,2, Xiangyu Xu 1,3, Wenxiu Sun 1, and Liang Lin 1,2 1 SenseTime 2 Sun Yat-sen University 3 Tsinghua University
Learning Monocular Depth by Distilling Cross-domain Stereo Networks
 Learning Monocular Depth by Distilling Cross-domain Stereo Networks Xiaoyang Guo 1, Hongsheng Li 1, Shuai Yi 2, Jimmy Ren 2, and Xiaogang Wang 1 1 CUHK-SenseTime Joint Laboratory, The Chinese University
Learning Monocular Depth by Distilling Cross-domain Stereo Networks Xiaoyang Guo 1, Hongsheng Li 1, Shuai Yi 2, Jimmy Ren 2, and Xiaogang Wang 1 1 CUHK-SenseTime Joint Laboratory, The Chinese University
UNSUPERVISED STEREO MATCHING USING CORRESPONDENCE CONSISTENCY. Sunghun Joung Seungryong Kim Bumsub Ham Kwanghoon Sohn
 UNSUPERVISED STEREO MATCHING USING CORRESPONDENCE CONSISTENCY Sunghun Joung Seungryong Kim Bumsub Ham Kwanghoon Sohn School of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea E-mail:
UNSUPERVISED STEREO MATCHING USING CORRESPONDENCE CONSISTENCY Sunghun Joung Seungryong Kim Bumsub Ham Kwanghoon Sohn School of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea E-mail:
Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research 2 Sun Yat-sen University
Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research 2 Sun Yat-sen University
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
arxiv: v1 [cs.cv] 23 Mar 2018
![arxiv: v1 [cs.cv] 23 Mar 2018](/thumbs/85/93001669.jpg "arxiv: v1 [cs.cv] 23 Mar 2018") Pyramid Stereo Matching Network Jia-Ren Chang Yong-Sheng Chen Department of Computer Science, National Chiao Tung University, Taiwan {followwar.cs00g, yschen}@nctu.edu.tw arxiv:03.0669v [cs.cv] 3 Mar 0
Pyramid Stereo Matching Network Jia-Ren Chang Yong-Sheng Chen Department of Computer Science, National Chiao Tung University, Taiwan {followwar.cs00g, yschen}@nctu.edu.tw arxiv:03.0669v [cs.cv] 3 Mar 0
When Big Datasets are Not Enough: The need for visual virtual worlds.
 When Big Datasets are Not Enough: The need for visual virtual worlds. Alan Yuille Bloomberg Distinguished Professor Departments of Cognitive Science and Computer Science Johns Hopkins University Computational
When Big Datasets are Not Enough: The need for visual virtual worlds. Alan Yuille Bloomberg Distinguished Professor Departments of Cognitive Science and Computer Science Johns Hopkins University Computational
Urban Scene Segmentation, Recognition and Remodeling. Part III. Jinglu Wang 11/24/2016 ACCV 2016 TUTORIAL
 Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Bidirectional Recurrent Convolutional Networks for Video Super-Resolution
 Bidirectional Recurrent Convolutional Networks for Video Super-Resolution Qi Zhang & Yan Huang Center for Research on Intelligent Perception and Computing (CRIPAC) National Laboratory of Pattern Recognition
Bidirectional Recurrent Convolutional Networks for Video Super-Resolution Qi Zhang & Yan Huang Center for Research on Intelligent Perception and Computing (CRIPAC) National Laboratory of Pattern Recognition
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
Usings CNNs to Estimate Depth from Stereo Imagery
 1 Usings CNNs to Estimate Depth from Stereo Imagery Tyler S. Jordan, Skanda Shridhar, Jayant Thatte Abstract This paper explores the benefit of using Convolutional Neural Networks in generating a disparity
1 Usings CNNs to Estimate Depth from Stereo Imagery Tyler S. Jordan, Skanda Shridhar, Jayant Thatte Abstract This paper explores the benefit of using Convolutional Neural Networks in generating a disparity
LSTM and its variants for visual recognition. Xiaodan Liang Sun Yat-sen University
 LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform. Xintao Wang Ke Yu Chao Dong Chen Change Loy
 Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform Xintao Wang Ke Yu Chao Dong Chen Change Loy Problem enlarge 4 times Low-resolution image High-resolution image Previous
Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform Xintao Wang Ke Yu Chao Dong Chen Change Loy Problem enlarge 4 times Low-resolution image High-resolution image Previous
Input. Output. Problem Definition. Rectified stereo image pair All correspondences lie in same scan lines
 Problem Definition 3 Input Rectified stereo image pair All correspondences lie in same scan lines Output Disparity map of the reference view Foreground: large disparity Background: small disparity Matching
Problem Definition 3 Input Rectified stereo image pair All correspondences lie in same scan lines Output Disparity map of the reference view Foreground: large disparity Background: small disparity Matching
Towards a Simulation Driven Stereo Vision System
 Towards a Simulation Driven Stereo Vision System Martin Peris Cyberdyne Inc., Japan Email: martin peris@cyberdyne.jp Sara Martull University of Tsukuba, Japan Email: info@martull.com Atsuto Maki Toshiba
Towards a Simulation Driven Stereo Vision System Martin Peris Cyberdyne Inc., Japan Email: martin peris@cyberdyne.jp Sara Martull University of Tsukuba, Japan Email: info@martull.com Atsuto Maki Toshiba
Depth Estimation from a Single Image Using a Deep Neural Network Milestone Report
 Figure 1: The architecture of the convolutional network. Input: a single view image; Output: a depth map. 3 Related Work In [4] they used depth maps of indoor scenes produced by a Microsoft Kinect to successfully
Figure 1: The architecture of the convolutional network. Input: a single view image; Output: a depth map. 3 Related Work In [4] they used depth maps of indoor scenes produced by a Microsoft Kinect to successfully
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation
 AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Learning for Virtual Shopping. Dr. Jürgen Sturm Group Leader RGB-D
 Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
A virtual tour of free viewpoint rendering
 A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
Semi-Supervised Deep Learning for Monocular Depth Map Prediction
 Semi-Supervised Deep Learning for Monocular Depth Map Prediction Yevhen Kuznietsov Jörg Stückler Bastian Leibe Computer Vision Group, Visual Computing Institute, RWTH Aachen University yevhen.kuznietsov@rwth-aachen.de,
Semi-Supervised Deep Learning for Monocular Depth Map Prediction Yevhen Kuznietsov Jörg Stückler Bastian Leibe Computer Vision Group, Visual Computing Institute, RWTH Aachen University yevhen.kuznietsov@rwth-aachen.de,
Seeing the unseen. Data-driven 3D Understanding from Single Images. Hao Su
 Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
CNN for Low Level Image Processing. Huanjing Yue
 CNN for Low Level Image Processing Huanjing Yue 2017.11 1 Deep Learning for Image Restoration General formulation: min Θ L( x, x) s. t. x = F(y; Θ) Loss function Parameters to be learned Key issues The
CNN for Low Level Image Processing Huanjing Yue 2017.11 1 Deep Learning for Image Restoration General formulation: min Θ L( x, x) s. t. x = F(y; Θ) Loss function Parameters to be learned Key issues The
Supplemental Material for End-to-End Learning of Video Super-Resolution with Motion Compensation
 Supplemental Material for End-to-End Learning of Video Super-Resolution with Motion Compensation Osama Makansi, Eddy Ilg, and Thomas Brox Department of Computer Science, University of Freiburg 1 Computation
Supplemental Material for End-to-End Learning of Video Super-Resolution with Motion Compensation Osama Makansi, Eddy Ilg, and Thomas Brox Department of Computer Science, University of Freiburg 1 Computation
Unsupervised Learning of Geometry from Videos with Edge-Aware Depth-Normal Consistency
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Unsupervised Learning of Geometry from Videos with Edge-Aware Depth-Normal Consistency Zhenheng Yang, 1 Peng Wang, 2 Wei Xu, 2 Liang
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Unsupervised Learning of Geometry from Videos with Edge-Aware Depth-Normal Consistency Zhenheng Yang, 1 Peng Wang, 2 Wei Xu, 2 Liang
DEEP BLIND IMAGE QUALITY ASSESSMENT
 DEEP BLIND IMAGE QUALITY ASSESSMENT BY LEARNING SENSITIVITY MAP Jongyoo Kim, Woojae Kim and Sanghoon Lee ICASSP 2018 Deep Learning and Convolutional Neural Networks (CNNs) SOTA in computer vision & image
DEEP BLIND IMAGE QUALITY ASSESSMENT BY LEARNING SENSITIVITY MAP Jongyoo Kim, Woojae Kim and Sanghoon Lee ICASSP 2018 Deep Learning and Convolutional Neural Networks (CNNs) SOTA in computer vision & image
arxiv: v2 [cs.cv] 20 Oct 2015
![arxiv: v2 [cs.cv] 20 Oct 2015](/thumbs/75/72634031.jpg "arxiv: v2 [cs.cv] 20 Oct 2015") Computing the Stereo Matching Cost with a Convolutional Neural Network Jure Žbontar University of Ljubljana jure.zbontar@fri.uni-lj.si Yann LeCun New York University yann@cs.nyu.edu arxiv:1409.4326v2 [cs.cv]
Computing the Stereo Matching Cost with a Convolutional Neural Network Jure Žbontar University of Ljubljana jure.zbontar@fri.uni-lj.si Yann LeCun New York University yann@cs.nyu.edu arxiv:1409.4326v2 [cs.cv]
Learning visual odometry with a convolutional network
 Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Light Field Super Resolution with Convolutional Neural Networks
 Light Field Super Resolution with Convolutional Neural Networks by Andrew Hou A Thesis submitted in partial fulfillment of the requirements for Honors in the Department of Applied Mathematics and Computer
Light Field Super Resolution with Convolutional Neural Networks by Andrew Hou A Thesis submitted in partial fulfillment of the requirements for Honors in the Department of Applied Mathematics and Computer
Left-Right Comparative Recurrent Model for Stereo Matching
 Left-Right Comparative Recurrent Model for Stereo Matching Zequn Jie Pengfei Wang Yonggen Ling Bo Zhao Yunchao Wei Jiashi Feng Wei Liu Tencent AI Lab National University of Singapore University of British
Left-Right Comparative Recurrent Model for Stereo Matching Zequn Jie Pengfei Wang Yonggen Ling Bo Zhao Yunchao Wei Jiashi Feng Wei Liu Tencent AI Lab National University of Singapore University of British
Human Pose Estimation with Deep Learning. Wei Yang
 Human Pose Estimation with Deep Learning Wei Yang Applications Understand Activities Family Robots American Heist (2014) - The Bank Robbery Scene 2 What do we need to know to recognize a crime scene? 3
Human Pose Estimation with Deep Learning Wei Yang Applications Understand Activities Family Robots American Heist (2014) - The Bank Robbery Scene 2 What do we need to know to recognize a crime scene? 3
Fast Guided Global Interpolation for Depth and. Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu
 Fast Guided Global Interpolation for Depth and Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu Introduction Depth upsampling and motion interpolation are often required to generate a dense, high-quality, and
Fast Guided Global Interpolation for Depth and Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu Introduction Depth upsampling and motion interpolation are often required to generate a dense, high-quality, and
Open-World Stereo Video Matching with Deep RNN
 Open-World Stereo Video Matching with Deep RNN Yiran Zhong 1,3,4, Hongdong Li 1,3, Yuchao Dai 2 1 Australian National University, Australia 2 Northwestern Polytechnical University, China 3 Australian Centre
Open-World Stereo Video Matching with Deep RNN Yiran Zhong 1,3,4, Hongdong Li 1,3, Yuchao Dai 2 1 Australian National University, Australia 2 Northwestern Polytechnical University, China 3 Australian Centre
MoFA: Model-based Deep Convolutional Face Autoencoder for Unsupervised Monocular Reconstruction
 MoFA: Model-based Deep Convolutional Face Autoencoder for Unsupervised Monocular Reconstruction Ayush Tewari Michael Zollhofer Hyeongwoo Kim Pablo Garrido Florian Bernard Patrick Perez Christian Theobalt
MoFA: Model-based Deep Convolutional Face Autoencoder for Unsupervised Monocular Reconstruction Ayush Tewari Michael Zollhofer Hyeongwoo Kim Pablo Garrido Florian Bernard Patrick Perez Christian Theobalt
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Beyond local reasoning for stereo confidence estimation with deep learning
 Beyond local reasoning for stereo confidence estimation with deep learning Fabio Tosi, Matteo Poggi, Antonio Benincasa, and Stefano Mattoccia University of Bologna, Viale del Risorgimento 2, Bologna, Italy
Beyond local reasoning for stereo confidence estimation with deep learning Fabio Tosi, Matteo Poggi, Antonio Benincasa, and Stefano Mattoccia University of Bologna, Viale del Risorgimento 2, Bologna, Italy
Efficient Deep Learning for Stereo Matching
 Efficient Deep Learning for Stereo Matching Wenjie Luo Alexander G. Schwing Raquel Urtasun Department of Computer Science, University of Toronto {wenjie, aschwing, urtasun}@cs.toronto.edu Abstract In the
Efficient Deep Learning for Stereo Matching Wenjie Luo Alexander G. Schwing Raquel Urtasun Department of Computer Science, University of Toronto {wenjie, aschwing, urtasun}@cs.toronto.edu Abstract In the
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
arxiv: v1 [cs.cv] 16 Nov 2015
![arxiv: v1 [cs.cv] 16 Nov 2015](/thumbs/85/92600288.jpg "arxiv: v1 [cs.cv] 16 Nov 2015") Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Learning to generate 3D shapes
 Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Flow Estimation. Min Bai. February 8, University of Toronto. Min Bai (UofT) Flow Estimation February 8, / 47
 Flow Estimation February 8, / 47") Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
arxiv: v1 [cs.cv] 26 Sep 2018
![arxiv: v1 [cs.cv] 26 Sep 2018](/thumbs/87/96210883.jpg "arxiv: v1 [cs.cv] 26 Sep 2018") DSR: Direct Self-rectification for Uncalibrated Dual-lens Cameras Ruichao Xiao Wenxiu Sun Jiahao Pang Qiong Yan Jimmy Ren SenseTime Research {xiaoruichao, sunwenxiu, pangjiahao, yanqiong, rensijie}@sensetime.com
DSR: Direct Self-rectification for Uncalibrated Dual-lens Cameras Ruichao Xiao Wenxiu Sun Jiahao Pang Qiong Yan Jimmy Ren SenseTime Research {xiaoruichao, sunwenxiu, pangjiahao, yanqiong, rensijie}@sensetime.com
Learning Deep Structured Models for Semantic Segmentation. Guosheng Lin
 Learning Deep Structured Models for Semantic Segmentation Guosheng Lin Semantic Segmentation Outline Exploring Context with Deep Structured Models Guosheng Lin, Chunhua Shen, Ian Reid, Anton van dan Hengel;
Learning Deep Structured Models for Semantic Segmentation Guosheng Lin Semantic Segmentation Outline Exploring Context with Deep Structured Models Guosheng Lin, Chunhua Shen, Ian Reid, Anton van dan Hengel;
On-line and Off-line 3D Reconstruction for Crisis Management Applications
 On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
Stereo Correspondence with Occlusions using Graph Cuts
 Stereo Correspondence with Occlusions using Graph Cuts EE368 Final Project Matt Stevens mslf@stanford.edu Zuozhen Liu zliu2@stanford.edu I. INTRODUCTION AND MOTIVATION Given two stereo images of a scene,
Stereo Correspondence with Occlusions using Graph Cuts EE368 Final Project Matt Stevens mslf@stanford.edu Zuozhen Liu zliu2@stanford.edu I. INTRODUCTION AND MOTIVATION Given two stereo images of a scene,
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Unsupervised Adaptation for Deep Stereo
 Unsupervised Adaptation for Deep Stereo Alessio Tonioni, Matteo Poggi, Stefano Mattoccia, Luigi Di Stefano University of Bologna, Department of Computer Science and Engineering (DISI) Viale del Risorgimento
Unsupervised Adaptation for Deep Stereo Alessio Tonioni, Matteo Poggi, Stefano Mattoccia, Luigi Di Stefano University of Bologna, Department of Computer Science and Engineering (DISI) Viale del Risorgimento
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Towards real-time unsupervised monocular depth estimation on CPU
 Towards real-time unsupervised monocular depth estimation on CPU Matteo Poggi1, Filippo Aleotti2, Fabio Tosi1, Stefano Mattoccia1 Abstract Unsupervised depth estimation from a single image is a very attractive
Towards real-time unsupervised monocular depth estimation on CPU Matteo Poggi1, Filippo Aleotti2, Fabio Tosi1, Stefano Mattoccia1 Abstract Unsupervised depth estimation from a single image is a very attractive
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications
 Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Ping Tan. Simon Fraser University
 Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Stereo Matching.
 Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Subpixel accurate refinement of disparity maps using stereo correspondences
 Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Rendering Portraitures from Monocular Camera and Beyond
 Rendering Portraitures from Monocular Camera and Beyond Xiangyu Xu 1,2 Deqing Sun 3 Sifei Liu 3 Wenqi Ren 4 Yu-Jin Zhang 1 Ming-Hsuan Yang 5,6 Jian Sun 7 1 Tsinghua University 2 SenseTime 3 Nvidia 4 Tencent
Rendering Portraitures from Monocular Camera and Beyond Xiangyu Xu 1,2 Deqing Sun 3 Sifei Liu 3 Wenqi Ren 4 Yu-Jin Zhang 1 Ming-Hsuan Yang 5,6 Jian Sun 7 1 Tsinghua University 2 SenseTime 3 Nvidia 4 Tencent
Bilevel Sparse Coding
 Adobe Research 345 Park Ave, San Jose, CA Mar 15, 2013 Outline 1 2 The learning model The learning algorithm 3 4 Sparse Modeling Many types of sensory data, e.g., images and audio, are in high-dimensional
Adobe Research 345 Park Ave, San Jose, CA Mar 15, 2013 Outline 1 2 The learning model The learning algorithm 3 4 Sparse Modeling Many types of sensory data, e.g., images and audio, are in high-dimensional
Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling
 [DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
[DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image. Supplementary Material
 Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
SUPPLEMENTARY MATERIAL
 SUPPLEMENTARY MATERIAL Zhiyuan Zha 1,3, Xin Liu 2, Ziheng Zhou 2, Xiaohua Huang 2, Jingang Shi 2, Zhenhong Shang 3, Lan Tang 1, Yechao Bai 1, Qiong Wang 1, Xinggan Zhang 1 1 School of Electronic Science
SUPPLEMENTARY MATERIAL Zhiyuan Zha 1,3, Xin Liu 2, Ziheng Zhou 2, Xiaohua Huang 2, Jingang Shi 2, Zhenhong Shang 3, Lan Tang 1, Yechao Bai 1, Qiong Wang 1, Xinggan Zhang 1 1 School of Electronic Science
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
A Novel Multi-Frame Color Images Super-Resolution Framework based on Deep Convolutional Neural Network. Zhe Li, Shu Li, Jianmin Wang and Hongyang Wang
 5th International Conference on Measurement, Instrumentation and Automation (ICMIA 2016) A Novel Multi-Frame Color Images Super-Resolution Framewor based on Deep Convolutional Neural Networ Zhe Li, Shu
5th International Conference on Measurement, Instrumentation and Automation (ICMIA 2016) A Novel Multi-Frame Color Images Super-Resolution Framewor based on Deep Convolutional Neural Networ Zhe Li, Shu
Joint Inference in Image Databases via Dense Correspondence. Michael Rubinstein MIT CSAIL (while interning at Microsoft Research)
") Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
arxiv: v2 [cs.cv] 5 Jun 2018
![arxiv: v2 [cs.cv] 5 Jun 2018](/thumbs/85/92053091.jpg "arxiv: v2 [cs.cv] 5 Jun 2018") arxiv:1806.01260v2 [cs.cv] 5 Jun 2018 Digging Into Self-Supervised Monocular Depth Estimation Clément Godard Oisin Mac Aodha Gabriel J. Brostow Abstract. Depth-sensing is important for both navigation
arxiv:1806.01260v2 [cs.cv] 5 Jun 2018 Digging Into Self-Supervised Monocular Depth Estimation Clément Godard Oisin Mac Aodha Gabriel J. Brostow Abstract. Depth-sensing is important for both navigation
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models
 One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
Stereo Computation for a Single Mixture Image
 Stereo Computation for a Single Mixture Image Yiran Zhong 1,3,4, Yuchao Dai 2, and Hongdong Li 1,4 1 Australian National University 2 Northwestern Polytechnical University 3 Data61 CSIRO 4 Australian Centre
Stereo Computation for a Single Mixture Image Yiran Zhong 1,3,4, Yuchao Dai 2, and Hongdong Li 1,4 1 Australian National University 2 Northwestern Polytechnical University 3 Data61 CSIRO 4 Australian Centre
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza
 Davide Scaramuzza") Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
From 3D descriptors to monocular 6D pose: what have we learned?
 ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
Asymmetric 2 1 pass stereo matching algorithm for real images
 455, 057004 May 2006 Asymmetric 21 pass stereo matching algorithm for real images Chi Chu National Chiao Tung University Department of Computer Science Hsinchu, Taiwan 300 Chin-Chen Chang National United
455, 057004 May 2006 Asymmetric 21 pass stereo matching algorithm for real images Chi Chu National Chiao Tung University Department of Computer Science Hsinchu, Taiwan 300 Chin-Chen Chang National United
In ICIP 2017, Beijing, China MONDRIAN STEREO. Middlebury College Middlebury, VT, USA
 In ICIP 2017, Beijing, China MONDRIAN STEREO Dylan Quenneville Daniel Scharstein Middlebury College Middlebury, VT, USA ABSTRACT Untextured scenes with complex occlusions still present challenges to modern
In ICIP 2017, Beijing, China MONDRIAN STEREO Dylan Quenneville Daniel Scharstein Middlebury College Middlebury, VT, USA ABSTRACT Untextured scenes with complex occlusions still present challenges to modern
Learning monocular depth estimation with unsupervised trinocular assumptions
 Learning monocular depth estimation with unsupervised trinocular assumptions Matteo Poggi, Fabio Tosi, Stefano Mattoccia University of Bologna, Department of Computer Science and Engineering Viale del
Learning monocular depth estimation with unsupervised trinocular assumptions Matteo Poggi, Fabio Tosi, Stefano Mattoccia University of Bologna, Department of Computer Science and Engineering Viale del
Single Image Super-resolution. Slides from Libin Geoffrey Sun and James Hays
 Single Image Super-resolution Slides from Libin Geoffrey Sun and James Hays Cs129 Computational Photography James Hays, Brown, fall 2012 Types of Super-resolution Multi-image (sub-pixel registration) Single-image
Single Image Super-resolution Slides from Libin Geoffrey Sun and James Hays Cs129 Computational Photography James Hays, Brown, fall 2012 Types of Super-resolution Multi-image (sub-pixel registration) Single-image
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Instance-aware Semantic Segmentation via Multi-task Network Cascades
 Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS. Mustafa Ozan Tezcan
 MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS Mustafa Ozan Tezcan Boston University Department of Electrical and Computer Engineering 8 Saint Mary s Street Boston, MA 2215 www.bu.edu/ece Dec. 19,
MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS Mustafa Ozan Tezcan Boston University Department of Electrical and Computer Engineering 8 Saint Mary s Street Boston, MA 2215 www.bu.edu/ece Dec. 19,
Intensity-Depth Face Alignment Using Cascade Shape Regression
 Intensity-Depth Face Alignment Using Cascade Shape Regression Yang Cao 1 and Bao-Liang Lu 1,2 1 Center for Brain-like Computing and Machine Intelligence Department of Computer Science and Engineering Shanghai
Intensity-Depth Face Alignment Using Cascade Shape Regression Yang Cao 1 and Bao-Liang Lu 1,2 1 Center for Brain-like Computing and Machine Intelligence Department of Computer Science and Engineering Shanghai
Filter Flow: Supplemental Material
 Filter Flow: Supplemental Material Steven M. Seitz University of Washington Simon Baker Microsoft Research We include larger images and a number of additional results obtained using Filter Flow [5]. 1
Filter Flow: Supplemental Material Steven M. Seitz University of Washington Simon Baker Microsoft Research We include larger images and a number of additional results obtained using Filter Flow [5]. 1
Detecting motion by means of 2D and 3D information
 Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Joint Object Detection and Viewpoint Estimation using CNN features
 Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Part 3: Dense Stereo Correspondence
 1 Tutorial on Geometric and Semantic 3D Reconstruction Part 3: Dense Stereo Correspondence Sudipta N. Sinha Microsoft Research Overview 2 Basics Semi Global Matching (SGM) and extensions Recent directions
1 Tutorial on Geometric and Semantic 3D Reconstruction Part 3: Dense Stereo Correspondence Sudipta N. Sinha Microsoft Research Overview 2 Basics Semi Global Matching (SGM) and extensions Recent directions
A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri
 A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri Università degli Studi Roma TRE, Roma, Italy 2 nd Workshop on Light Fields for Computer
A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri Università degli Studi Roma TRE, Roma, Italy 2 nd Workshop on Light Fields for Computer
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan