Multi-view shape reconstruction
|
|
|
- Christopher Pearson
- 5 years ago
- Views:
Transcription
1 Multi-view shape reconstruction


2 Shape reconstruction Given A set of images (views) of an object / scene Camera calibration information [Light calibration information] Find the surface that best agrees with the input images. Approach: chose a surface representation define a photo-consistency function [in practice photo-consistency+regularization] solve the following minimization S, X φ(x) min S X S φ(x )dx
")

3 φ(x ) Photo-consistency function(al) Based on image cues (shading, stereo, silhouettes, ) Extension SFS/PS to multi-view: Move camera SFS Needs camera/light calibration! Move object PS
4 Surface representation Image-centered Depth/disparity w.r. to image plane 3D point Image plane Partial object reconstr. Limited resolution Viewpoint dependent Object-centered Voxels Level sets (implicit) Mesh Depth with respect to a base mesh Local patches time 3D plane
")
5 Comparison of different methods 2 datasets No light (moving camera)
6 Volumetric representation Object : collection of voxels Normals :? Method: carve away voxels that are not photo-consistent with images (purely discrete) Regularization: no way of ensuring smoothness Visibility: ensured by the order of traversal (in general a problem!)
7 Disparity/Depth map ( x, y) Reference image Object (surface) : Normals : Method: f ( x, y) Regularization: Visibility: 3D point Reference image plane s ( x, y) = ( x, y, f ( x, y)) find f that best agrees with the input images (minimize the cost functional integrated over the surface) smoothness on ( x, y) s s f f n = =,, 1 x y x y min φ( f xy x, y, f, f ) dxdy f f ( x, y)? (mesh defined on image plane + Zbuffering) T φsmooth = f ( x, y) 2
 : X = X, d displacement direction (displacement map)")
 dxdy f f f n =,, 1 x y Regularization: smoothness on (local / global) Visibility:?")
8 Depth w.r. base mesh X f d B X Object (surface) : X = X, d displacement direction (displacement map) Normals : local (per triangle) transform to global CS Method: min f φ ( X B B + X B f d, f, f ) dxdy f f f n =,, 1 x y Regularization: smoothness on (local / global) Visibility:? (fine mesh to connect points on each plane + Zbuffering) How to deal with boundaries? T
 j ) ( v i v j ) v 1 n 1 v n v n 2 2 3 3")
9 Mesh Object (surface) : Normals : Method: Regularization: Visibility: mesh vertices interpolated move vertices along interpolated normals based on photoconsistency of neighboring triangles. smooth normals Zbuffering Topologiocal changes? X = λ + 1v1 + λ2v2 λ3v3 n = λ + n = ( v j k v 1n1 + λ2n2 λ3n3 j, k, i Δ ( v j ) j ) ( v i v j ) v 1 n 1 v n v n

 [Esteban and Schmitt CVIU 2005] (depth on base")

10 Mixed Representations:Local patches Mixed approaches : patches on voxels for a finer surface representation mesh on pre-computed voxel correlation (potential fields) [Esteban and Schmitt CVIU 2005] (depth on base mesh) Patches : arbitrary : [Zheng, Paris et al. IJCV2006] quadratic : surfels [Carceroni and Kutulakos IJCV 2002]
11 Optimization Disparity map Depth w.r.plane Level sets Mesh Voxels Graph-cuts Belief propagation Dynamic programming Non-linear optimization Variational calculus Voxel carving (coloring) Discrete methods Continuous methods

12 Summary Discrete Voxel carving Graph cut techniques Continuous Variational and level set techniques Mesh-based reconstruction
13 Volumetric reconstruction Method : Carve voxels that are not consistent with images (according to a chosen photo-consistency score). OR N 3 voxels C colors Assign colors to voxels consistent with the input images. (color + opacity) True scene Photo-consist. scenes 3 N C all scenes Not unique solution Order of traversal v. important


 Not photo-consistent")

14 Shape from Silhouette Binary images Back project each silhouette 3D cone. Carve all voxels outside the cone. Result: Reconstruction contains the true scene, but not the same (no concavities) Not photo-consistent (only to binary images). In the limit reconstructs a visual hull [Martin PAMI 91][Szeliski 93]
 Plane sweep [Collins CVPR 96] [Seitz,Dyer CVPR97] Traversal")
15 Voxel coloring Each voxel Project in images and correlate Color if consistent Visibility! Depth ordering : Single visibility ordering for each view (Restriction in camera placement) Plane sweep [Collins CVPR 96] [Seitz,Dyer CVPR97] Traversal order No scene point contained within the convex hull of the cameras



16 Voxel coloring : results Input image Results [Seitz,Dyer CVPR97]
17 Space carving In general a view independent order might not exist Space carving [Kutulakos, Seitz ICCV 99, IJCV 2002] initialize a volume containing the scene Choose a voxel on the surface of the scene Project in all visible images Carve if not consistent Repeat until convergence Consistency: The resulting shape is photo-consistent (all inconsistent voxels are removed) Convergence: Carving converges to a non-empty shape (a point on the true surface is never removed) Photo-hull


18 Space carving : photo hull Initial volume and true scene Photo-hull Photo-hull = union of all photo-consistent shapes Basic algorithm : requires a difficult update procedure (visibility computation after carving a voxel) Multi-pass plane sweep : Sweep plane in each 6 directions Consider active only cameras on one side of the plane





19 Space carving : results [Kutulakos, Seitz ICCV 99, IJCV 2002]

20 Other volumetric representations Voxel-based Image ray based Axis-aligned - Inaccurate + Triangulate w. marching cubes + Accurate + Moderatly accurate + Fast + Marching intersections
21 Graph cuts for multi-view reconstruction Discrete surface reconstruction Graph cut Graph cuts as hypersurfaces Example: [Paris, Sillion, Quan IJCV 05] Types of energies minimized with graph cut [Kolmogorov Zabih ECCV 2002] Graph cuts for multi-labeling
22 min S Reconstruction as labeling S φ data ( X ) dx + Discrete formulation: S φ smooth N ( X) surface representation labels Photo-consistency ( X, Y ) dydx p P Find a set of labels f = f,..., f p,..., f ) that minimize E( f ) = φ ( f ) + λ φ p data p smooth { p, q} N Smoothness f p ( 1 P ( f p, f q ) Ex: disparity map voxels pixels voxels disparities occupancy { 0,1,2...} {0,1 } Notes: NP hard Can be solved using MRF energy minimization methods graph cuts (submodular E), dynamic programming, belief propagation, simulated annealing
23 Graph cuts Oriented graph nodes edges G = V, E V, source s, sink t E, edge capacity w(p,q) (non-negative) Cut C={S,T} partition of nodes into two disjoint sets such that s S, t T Cost of the cut p S, q T w( p, q) Minimum cut cut that has minimum cost among all cuts (binary labeling) Maximum flow maximum amount of liquid that can be sent from the source to the sink interpreting edges as pipes with capacity w. Polynomial time algorithms Augmenting paths [Ford & Fulkerson, 1962] Push-relabel [Goldberg-Tarjan, 1986]
24 Energy minimization via graph cuts Motivation: Geometric interpretation cut = hypersurface in N-D space embedding the corresponding graph used to compute optimal hypersurface Powerful energy minimization tool for a large class of binary and non-binary energies global minimum; strong local minimum Surface reconstruction: Chose a surface representation Define a graph (nodes, weights) such that the cost of a cut corresponds to the surface energy function. How to find global labeling using graph cut? What kind of energy can be minimized with a graph cut?
25 Graph Cuts as Hypersurfaces t cut labels cut y Graph fully embedded in the working geometric space Feasible cut = separated hypersurface in the embedding continuous manifold s p x
26 Example of geometric graph [Paris, Sillion, Quan: A surface reconstruction method using global graph cut optimization IJCV 05] Disparity map: pixel p = ( x, y) label = disparity E( f ) = D ( f ) + λ d 1 p source D 1 (d 1 ) D 4 (d 1 ) λ λ λ p p { p, q} N D 1 (d 2 )D 2 (d 2 ) D 3 (d 2 ) D 4 (d 2 ) f p f q D f ) = I ( p) I ( p + p ( p 1 2 f p λ' = λ f E min 2 = D ( d λ d 4 1 d 3 4 f 1 ) + λ d + D 4 4 ( d 4 d ) p f p 3 + D ( d 2 3 ) ) + D 3 ( d 3 ) + d 2 d 3 d 4 λ λ λ sink D 4 (d 3 ) D 4 (d 4 ) f 1 =d4 f 2 =d3 f 3 =d3 f 4 =d4 Graph Surface


27 Results Convex smoothing global solution [Paris, Sillion, Quan IJCV 05, ACCV 04]
28 Types of energies E( f ) = D( f ) + λ Convex + global convergence - oversmooth p p V ( { p, q} N Preserves discontinuities NP hard? convergence Potts piecewise planar binary graph f p V ( f V ( f V (, p p V ( f V ( f f,, p p f,, p ρ( b) q f f, ) q q f f ) ) q q f ) ) q = = = = f p ( f f ) 2 p min min ) = λ pq f 1, true = 0, false q q ( T, f ) p fq ( ) 2 T, f f ρ[ f ( ) p p f q q linear ] V(Δf) V(Δf) Potts V(Δf) Δf=fp-fq Δf=fp-fq Δf=fp-fq
29 Exact multi-labeling Linear and convex smoothing (interaction) energy Geometric graphs. Multi-scan-line stereo [Roy & Cox 1998, 1999] [Ishikawa & Geiger 1999] (occlusion handling) Linear interaction energy [Ishikawa & Geiger 1998] [Boykov, Veksler, Zabih 1998] Convex interaction energy [Ishikawa 2000, 2003] t s
30 Binary graphs [Kolmogorov, Zabih : What energy functions can be minimized via graph cuts? ECCV 2002] E( f ) = f p { s, t} p D ( f ) p p + pq N λ pq δ fp fq D p (t) t-link n-links t w pq a cut t-link s D p (s) Complete characterization of energies that can be minimized with graph cut : E(f) can be minimized by V ( s, s) + V( t, t) V( s, t) + V( t, s) s-t graph cuts Large class of energies (Potts, metric ) BUT multi-view reconstruction is a multi-labeling problem!
31 t-link Approximate multi-labeling Binary Potts energy Extended to multi-labeling NP hard ( 3 labels) n-links t cut w pq t-link [ Boykov et al: Fast approximate energy via graph cuts, PAMI 2001] α Expansion approximate solution Ideea: break optimization into a set of binary s-t cut problems Each iteration consider one label a Binary cut: some labels are relabeled with a; the others remain unchanged a current label s
 Applies to a")
 interactions")

32 Properties α expansion Guaranteed approximation quality within a factor of 2 from the global minima (Potts model) Applies to a wide class of energies with robust interactions Potts model Metric interactions Submodular (regular) interactions normalized correlation, start for annealing, 24.7% err simulated annealing, 19 hours, 20.3% err a-expansions (BVZ 89,01) 90 seconds, 5.8% err
33 Graph cuts : state of the art [ Boykov CVPR 05 Tutorial] Optimization of first-order properties of segmentation boundary (Riemannian length/area, flux of a vector field) Can t optimize curvature of the boundary (for now) Class of energies that can be minimized exactly binary energies with regular (sub-modular) interactions multi-label (non-binary) energies with convex interactions excludes robust discontinuity-preserving interactions Guaranteed quality approximation algorithms for multi-label energies with discontinuity-preserving interactions Potts model of interactions Metric interactions Regular (sub-modular) interactions
34 Graph cut Example [ Vogiatzis, Hermandez-Esteban, Torr, Cipolla PAMI 2007, CVPR 2005 ] Surface representation: voxels; no need for bounding inner/outer surface Regularization : weighted volume balloon force Minimization : graph cut Occlusions : accounted using a voting photo-consistency score (occluded pixels are treated as outliers) S = surface V(S) = foreground Photoconsistency Foreground/background cost σ(x)=-λ balloon force silhouette cue make σ(x) very large outside VH
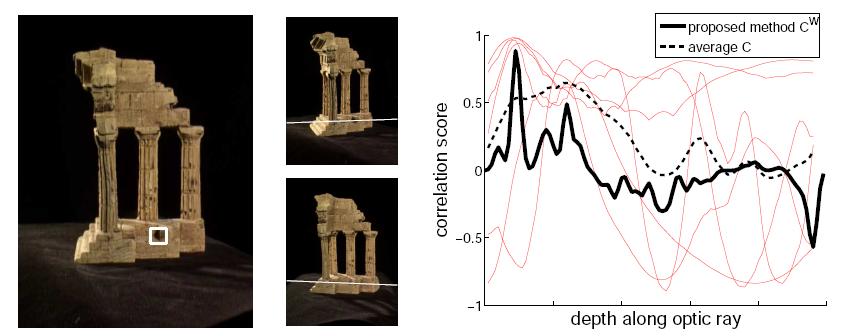
![Photo-consistency metric Account occlusions ρ(x,s) [continuous, level set formulations] S determines visibility but S is the solution!](/docs-images/89/100762121/images/35-0.jpg "Problem : Not suitable for graph-cut Solution : ρ(x) that accounts for occlusions using NCC Optic ray Correlation scores d x Vote c i")
35 Photo-consistency metric Account occlusions ρ(x,s) [continuous, level set formulations] S determines visibility but S is the solution! Problem : Not suitable for graph-cut Solution : ρ(x) that accounts for occlusions using NCC Optic ray Correlation scores d x Vote c i
36 Account occlusions
 Ballooning 6")
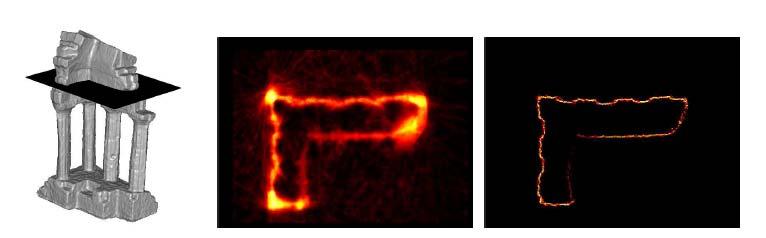
37 Graph structure Data (photo-consistency) Ballooning 6 neighboring system


38 Results Vogiatzis2 0.50mm Furukawa2 0.54mm

39 Competitor Yasu Furukawa Video
40 Multi-view stereo Disparity map Depth w.r.plane Level sets Mesh Voxels Graph-cuts Belief propagation Dynamic programming Non-linear optimization Variational calculus Voxel carving (coloring) Discrete methods Continuous methods
41 Continuous multi-view methods Regular surface and surface evolution Level set methods Example of mesh-based reconstruction
dx Cost functional : photo-consistency + regularization (smoothness) Numerical methods: gradient descent, conjugate gradient, level sets Natural extension of curve evolution (2D)")
42 Surface evolution Continuous formulation recover shape (surface) by minimizing cost functional integrated over the surface. min S X S φ(x )dx Cost functional : photo-consistency + regularization (smoothness) Numerical methods: gradient descent, conjugate gradient, level sets Natural extension of curve evolution (2D) [Caselles ICCV95] to 3D [Robert,Deriche ECCV 96][Faugeras Kerivan 98]
43 Regular surface Definition: Regular surface (manifold) 3 S R is a regular surface if for each point P S there exist a neighborhood V and a map X : U V S of an open 2 set such that (X = parametrization): U R 1. X differentiable 2. X homeomorphism ( 1 X : V S U continuous) ( u, v) U the differentiable dx R R is one to one ( u, v) :

44 Regular surface - properties Regular surface S tangent vector normal area curvature ) (,,,, 2 1 ) ( ) ( ) ( ), ( 1 v u v v vv u u uu Q R v u v u v u P P v u H R Q da dudv R A S T span w X X X X X n X X X n X X X X X X X n X X + = = = = = =
45 Surface evolution Cost functional Energy of the surface 3 3 Φ : R R R E = Φ ( X, n)da S + E = Φ ( X) da S Evolution flow (Euler-Lagrange equations) S = ( 2HΦ Φ, n ) OBS: problem is intrinsic (independent on parameterization) automatic regularization H motion in the normal direction t S(0) = S whole surface is evolving in time (reference frame attached to the object) 1. Discretization 2. Choice of cost functional da 0 X n
46 Photo-consistency functional π -1 (u,s) On Image On surface I X Image point u π(x) u π(x) Surface point X(u)=π -1 (u,s) X Φ Image i: E i im = E = ( u) = I( u) f Ω i Φ i im E i ( u) du ( X ( u)) Φ E i S = E = ( X ) = I( π ( X )) S i Φ i S E i ( X ) da f ( X ) S-surface, f(x)-color (radiance) of X
47 Where to integrate image/surface? Φ E du E im im im I X = 0, dx dt ( u) = = = XN 3 Z ( u) du da ( X ) = f ( I XN 3 Z X f On Image f ( X ( u)) da dx im X X = Φ N 3 = Φ dt Z Z Φ = I( I f ) + f ( I f ) im Ω S = I( u) Φ Φ im N = 0 X ) Z 3 N 3 X + Φ 3 Z Constant f N f Impossible to reconstruct = 0 Φ E On surface S S dx dt ( X ) = I( π ( X )) = Φ ( X ) da S S f ( X ) = ( ΦN + Φ H )N 1.Depends on image derivative 2.Automatic regularization 3.Doesn t account for image discretization


48 Surface evolution example [Faugeras Kerivan 98]
![Modeling correct visibility C C [Gargallo et al ICCV 07]](/docs-images/89/100762121/images/49-0.jpg "Horizon term Usual term = < > = = Γ else x n x x x x x n x H")
 ( ) ( ) ( π π δ π π π π π π Heaviside func.")
49 Modeling correct visibility C C [Gargallo et al ICCV 07] Horizon term Usual term = < > = = Γ else x n x x x x x n x H n x H x v 0 2} / 2, / { 1 ) ( 2} / 2, / { 2 1/ 2 / 2, / 0 2) / 2, / ( 1 ) ( ) ( ) ( π π δ π π π π π π Heaviside func. Dirac func.
50 Explicit representation Depth / disparity map X = ( x, y, f E( f ) = x y φ ( x, y)) data Surface discretization ( x, y, f ) dxdy + λ x y φ reg ( x, y, f, f ) dxdy 3D point Image plane ft = L (Euler-Lagrange eq.) [Robert and Deriche: Dense depth recovery from stereo images, ECAI1992] [Strecha et al: Dense matching of multiple wide-baseline views ICCV 2003] Depth with respect to plane Move points along displacement direction [Birkbeck et al 2006] Mesh E( S) Φ( λ1v1 + λ2v2 + λ3v3, λ1n 1 + λ2n2 + λ3n3) v t { v, v, v }{ λ, λ, λ } = E / v [Fua and Leclerc 1993] [Birkbeck et al ECCV 2006] v 1 n 1 v n 2 2 v 3 n3 3D plane
51 Level set representation Implicit representation Surface = Zero level set of a higher dimensional function Ψ( X) Ψ( X) Ψ( X) < 0 for X Ω R > 0 for X Ω (closer of Ω) = 0 for X Ω = S 3 Ψ( X, t) [Birkbeck] [Osher and Sethian 88] [Faugeras Keriven 98] (stereo) [Soatto Yezzi Jin ICCV 03] (specular refl.) normal curvature n = Ψ Ψ H = k = 1 2 Ψ Ψ Evolution cost function If S = In S 0) = t ( S0 then Ψ = I Ψ, n Ψ( S( t), t) = 0 t Efficient numerical schemes [Sethian 96][Osher 02]
52 Cost functional Photo-consistency : image cues (SFS,PS,stereo,silhouette) Where to integrate? : surface + makes the problem intrinsec + automatic regularization (multiplicative) - over-smoothing - not account for image discretization image + can add a regularizer Regularization : linear quadratic + improves convergence - penalizes large variation - over-smoothing non-quadratic, anisotropic E reg = Φ( z )dxdy [Robert, Deriche 96] [Alvarez, Deriche 00] [Strecha 02] (ex. Nagel-Enkelmann diff. oper.) + preserves discontinuities
53 Surface/depth regularization Depth map regularization f energy Euler Lagrange eq. 1. Homogenous Diffusion (heat eq) 2. Image-based regularization align depth discontinuities with the image discontinuities 3. Depth map regularization Not smooth across surface discontinuities f 2 Δf ( ) g( I ) f div g( I ) f f φ T D( I) f div ( D( I) f ) g decreasing function g(s 2 )->0 when s big (high gradients) inhibit diffusion D tensor ( ) ( ( ) ) 2 2 f div φ' f f tr φ D = f f ( T ) ( ( T f f div φ' f f ) f ) T φ' = g D
 f ( D( I) f ) correlation i-b regul.")
 ( ( T f f div φ' f f ) f ) φ' = g Depth based")
54 Example regularization g( I f T 2 ) f 2 D( I) f div div ( ) 2 g( I ) f ( D( I) f ) correlation i-b regul. Image-based regularization homog φ ( ) ( ( ) ) 2 2 f div φ' f f tr φ ( T ) ( ( T f f div φ' f f ) f ) φ' = g Depth based depth-based regularization

55 Example regularization d-b regul i-b regul.



56 Learn more about variational methods Level Set Methods S. Osher and R. Fedkiw, Springer 2003 Jan Erik Solem PhD thesis, Malmo Univ. Mathematical Problems in Image Processing Aubert et al Springer 2002 Hailin Jin PhD thesis, Washington Univ. The Handbook of Mathematical Models in Computer Vision N. Pragios editor Springer 2005
57 Graph-cuts and hypersurfaces Geometric graph for stereo [Roy,Cox ICCV 98, IJCV 1999] [Ishikawa, Geiger ECCV 1998] Convex smoothing global convergence distance map A B distance map B A Euclidian metric (ct) Riemannian metric (varying tensor) Connection between cuts and hypersurfaces in continuous spaces [ Boykov, Kolmogorov: Computing geodesics and minimal surfaces via graph cuts, ICCV 2003] Show how to build a grid graph and sets the weights such that the cost of cuts is arbitrarily close to the area of corresponding surface for any anisotropic Riemannian metric. Graph cut to find globally minimum surfaces (like level sets) under arbitrary Riemannian metric.
![Minimal surfaces and graph cut [Boykov, Kolmogorov ICCV03,05] distance map A B A distance map B Euclidian metric (ct) E = S da](/docs-images/89/100762121/images/58-0.jpg "Riemannian metric (varying tensor) E = Φ (X)dA S multi view stereo formulation Can the minimal surface energy be minimized with")
58 Minimal surfaces and graph cut [Boykov, Kolmogorov ICCV03,05] distance map A B A distance map B Euclidian metric (ct) E = S da Riemannian metric (varying tensor) E = Φ (X)dA S multi view stereo formulation Can the minimal surface energy be minimized with graph cut?
59 Cost of a cut C C = e e C Cost of a cut can be interpreted as a geometric length (in 2D) or area (in 3D) of the corresponding contour/surface. Cut metric is determined by the graph topology and by edge weights.
60 Riemanian metric C Euclidean length of C Cauchy-Crofton formula C ε 1 2 = n dρ dφ L the number of times line L intersects C
61 Cut Metric on grids can approximate Euclidean Metric Graph nodes are imbedded in R2 in a grid-like fashion Edges of any regular neighborhood system generate families of lines {,,, } C 4-neighborhoods (Manhattan metric) 8-neighborhoods C Euclidean length 1 ε 2 k n k Δρ Δφ the number of edges of family k intersecting C k k = C gc graph cut cost for edge weights: w k = Δρ k Δφ k 2

62 Example [Boykov]
63 Summary: representations Image centered Depth/disparity map Object centered Implicit (level sets) Mesh Voxels time 3D point Image plane + Natural extension of SFS, PS, stereo Strong min with graph cuts Handles topological changes Implied normals Visibility Graphics based Implied normals Visibility Handles large structures Arbitrary topology - Limited resolution Partial obj. reconstr Viewpoint dependent Too smooth Slow Closed surfaces Topological changes Ignores regularization (sensitive to noise) Limited resolution Occlusion handling
64 Discrete vs. continuous Level Sets variational optimization method for fairly general continuous energies Graph Cuts combinatorial optimization for a restricted class of energies [e.g. KZ 02] finds a local minimum near given initial solution finds a global minimum for a given set of boundary conditions numerical stability has to be carefully addressed [Osher&Sethian 88] continuous formulation -> finite differences numerical stability is not an issue discrete formulation ->min-cut algorithms anisotropic metrics are harder to deal with (e.g. slower) anisotropic Riemannian metrics are as easy as isotropic ones Gradient descent method [Boykov CVPRTut 2005] VS. Global minimization tool (restricted class of energies)
 specular materials general BRDF parametric System Camera calibration: pattern Light calibration: specular white sphere Light variation: rotating table,")
65 Neil Birkbeck A complete system Motivation method that works for objects with general reflectance textured and uniform regions shading + texture light variation (multiview PS) specular materials general BRDF parametric System Camera calibration: pattern Light calibration: specular white sphere Light variation: rotating table, fixed cam.
66 Cost functional Cost functional Per-point cost function E = Φ( X, n) da = Φ( X, n) Xu X S Φ( X, n) = h ( X, P ) I ( P ( X)) R( X, n, L ) i u v i i n = i X X u u X X v v v dudv Visibility+sampling reflectance camera proj. image light i R = n, l l + a kd, ( ) 1. Lambertial reflectance lamb i i i X light dir. light color ambient color BRDF albedo 2. Non-Lambertian reflectance BRDF = Phong In practice : filter specular highlights fit full reflectance only at the end
67 Surface discretization Surface = triangles, move vertices v v v X λ λ λ + + = v 1 n 1 2 n 2 v 3 v 3 n Normals interpolated n n n n λ λ λ + + = Albedo implied by the shape (closed form solution) (knowing light dir+color) ) ( ) ( ) (,, j i i k j j k j j v v v v n v = Δ Visibility/shadows Z buffering Cost function ), ( ) ( },, { },, { n n n v v v v v v λ λ λ λ λ λ λ λ λ Φ S E
68 Surface discretization Regularizer mean curvature S t = ( 2ΦH Φ,n )n Gradient finite differences Initial shape = visual hull Mesh handles topological changes Multi-resolution (image pyramid)
69 Results : refinement

70 Results : shape + reflectance
71 Improvements Better light model no need for calibration Model background? no need to extract silhouette (foreground) Mumford-Shah functional Discontinuities anisotropic regularization; discontinuous mesh Incorporate noise?
72 Shape from silhouette Dynamic texture Capture system
Graph Cuts vs. Level Sets. part I Basics of Graph Cuts
 ECCV 2006 tutorial on Graph Cuts vs. Level Sets part I Basics of Graph Cuts Yuri Boykov University of Western Ontario Daniel Cremers University of Bonn Vladimir Kolmogorov University College London Graph
ECCV 2006 tutorial on Graph Cuts vs. Level Sets part I Basics of Graph Cuts Yuri Boykov University of Western Ontario Daniel Cremers University of Bonn Vladimir Kolmogorov University College London Graph
3D Photography: Stereo Matching
 3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
Discrete Optimization Methods in Computer Vision CSE 6389 Slides by: Boykov Modified and Presented by: Mostafa Parchami Basic overview of graph cuts
 Discrete Optimization Methods in Computer Vision CSE 6389 Slides by: Boykov Modified and Presented by: Mostafa Parchami Basic overview of graph cuts [Yuri Boykov, Olga Veksler, Ramin Zabih, Fast Approximation
Discrete Optimization Methods in Computer Vision CSE 6389 Slides by: Boykov Modified and Presented by: Mostafa Parchami Basic overview of graph cuts [Yuri Boykov, Olga Veksler, Ramin Zabih, Fast Approximation
Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency
 1 Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Carlos Hernández Esteban, Philip H. S. Torr, Roberto Cipolla 2 Abstract This paper presents a volumetric
1 Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Carlos Hernández Esteban, Philip H. S. Torr, Roberto Cipolla 2 Abstract This paper presents a volumetric
Volumetric stereo with silhouette and feature constraints
 Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization
 Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization Alexander Ladikos Selim Benhimane Nassir Navab Chair for Computer Aided Medical Procedures Department of Informatics
Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization Alexander Ladikos Selim Benhimane Nassir Navab Chair for Computer Aided Medical Procedures Department of Informatics
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
3D Computer Vision. Dense 3D Reconstruction II. Prof. Didier Stricker. Christiano Gava
 3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Multiview Reconstruction
 Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
3D Dynamic Scene Reconstruction from Multi-View Image Sequences
 3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Space-time Isosurface Evolution for Temporally Coherent 3D Reconstruction
 Space-time Isosurface Evolution for Temporally Coherent 3D Reconstruction Bastian Goldluecke Marcus Magnor Max-Planck-Institut für Informatik Graphics-Optics-Vision Saarbrücken, Germany {bg,magnor}@mpii.de
Space-time Isosurface Evolution for Temporally Coherent 3D Reconstruction Bastian Goldluecke Marcus Magnor Max-Planck-Institut für Informatik Graphics-Optics-Vision Saarbrücken, Germany {bg,magnor}@mpii.de
From Photohulls to Photoflux Optimization
 1 From Photohulls to Photoflux Optimization Yuri Boykov Computer Science Department University of Western Ontario London, ON, Canada Victor Lempitsky Department of Mathematics Moscow State University Moscow,
1 From Photohulls to Photoflux Optimization Yuri Boykov Computer Science Department University of Western Ontario London, ON, Canada Victor Lempitsky Department of Mathematics Moscow State University Moscow,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 19: Graph Cuts source S sink T Readings Szeliski, Chapter 11.2 11.5 Stereo results with window search problems in areas of uniform texture Window-based matching
CS6670: Computer Vision Noah Snavely Lecture 19: Graph Cuts source S sink T Readings Szeliski, Chapter 11.2 11.5 Stereo results with window search problems in areas of uniform texture Window-based matching
Simplified Belief Propagation for Multiple View Reconstruction
 Simplified Belief Propagation for Multiple View Reconstruction E. Scott Larsen Philippos Mordohai Marc Pollefeys Henry Fuchs Department of Computer Science University of North Carolina at Chapel Hill Chapel
Simplified Belief Propagation for Multiple View Reconstruction E. Scott Larsen Philippos Mordohai Marc Pollefeys Henry Fuchs Department of Computer Science University of North Carolina at Chapel Hill Chapel
Multiview Stereo via Volumetric Graph-Cuts and Occlusion Robust Photo-Consistency
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 29, NO. 12, DECEMBER 2007 2241 Multiview Stereo via Volumetric Graph-Cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Member,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 29, NO. 12, DECEMBER 2007 2241 Multiview Stereo via Volumetric Graph-Cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Member,
3D and Appearance Modeling from Images
 3D and Appearance Modeling from Images Peter Sturm 1,Amaël Delaunoy 1, Pau Gargallo 2, Emmanuel Prados 1, and Kuk-Jin Yoon 3 1 INRIA and Laboratoire Jean Kuntzmann, Grenoble, France 2 Barcelona Media,
3D and Appearance Modeling from Images Peter Sturm 1,Amaël Delaunoy 1, Pau Gargallo 2, Emmanuel Prados 1, and Kuk-Jin Yoon 3 1 INRIA and Laboratoire Jean Kuntzmann, Grenoble, France 2 Barcelona Media,
Reconstructing Relief Surfaces
 Reconstructing Relief Surfaces George Vogiatzis 1 Philip Torr 2 Steven M. Seitz 3 Roberto Cipolla 1 1 Dept. of Engineering, University of Cambridge, Cambridge,CB2 1PZ, UK 2 Dept. of Computing, Oxford Brookes
Reconstructing Relief Surfaces George Vogiatzis 1 Philip Torr 2 Steven M. Seitz 3 Roberto Cipolla 1 1 Dept. of Engineering, University of Cambridge, Cambridge,CB2 1PZ, UK 2 Dept. of Computing, Oxford Brookes
Shape from Silhouettes
 Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
Introduction à la vision artificielle X
 Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction. CVPR 2017 Tutorial Christian Häne UC Berkeley
 Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Global Depth from Epipolar Volumes - A General Framework for Reconstructing Non-Lambertian Surfaces
 Global Depth from Epipolar Volumes - A General Framework for Reconstructing Non-Lambertian Surfaces Timo Stich 1, Art Tevs 2, Marcus Magnor 1 Computer Graphics Lab 1 MPI Informatik 2 TU Braunschweig, Germany
Global Depth from Epipolar Volumes - A General Framework for Reconstructing Non-Lambertian Surfaces Timo Stich 1, Art Tevs 2, Marcus Magnor 1 Computer Graphics Lab 1 MPI Informatik 2 TU Braunschweig, Germany
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Continuous and Discrete Optimization Methods in Computer Vision. Daniel Cremers Department of Computer Science University of Bonn
 Continuous and Discrete Optimization Methods in Computer Vision Daniel Cremers Department of Computer Science University of Bonn Oxford, August 16 2007 Segmentation by Energy Minimization Given an image,
Continuous and Discrete Optimization Methods in Computer Vision Daniel Cremers Department of Computer Science University of Bonn Oxford, August 16 2007 Segmentation by Energy Minimization Given an image,
SDG Cut: 3D Reconstruction of Non-lambertian Objects Using Graph Cuts on Surface Distance Grid
 SDG Cut: 3D Reconstruction of Non-lambertian Objects Using Graph Cuts on Surface Distance Grid Tianli Yu and Narendra Ahuja Beckman Institute & ECE Department Univ. of Illinois at Urbana-Champaign Urbana,
SDG Cut: 3D Reconstruction of Non-lambertian Objects Using Graph Cuts on Surface Distance Grid Tianli Yu and Narendra Ahuja Beckman Institute & ECE Department Univ. of Illinois at Urbana-Champaign Urbana,
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Variational Methods II
 Mathematical Foundations of Computer Graphics and Vision Variational Methods II Luca Ballan Institute of Visual Computing Last Lecture If we have a topological vector space with an inner product and functionals
Mathematical Foundations of Computer Graphics and Vision Variational Methods II Luca Ballan Institute of Visual Computing Last Lecture If we have a topological vector space with an inner product and functionals
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Joint 3D-Reconstruction and Background Separation in Multiple Views using Graph Cuts
 Joint 3D-Reconstruction and Background Separation in Multiple Views using Graph Cuts Bastian Goldlücke and Marcus A. Magnor Graphics-Optics-Vision Max-Planck-Institut für Informatik, Saarbrücken, Germany
Joint 3D-Reconstruction and Background Separation in Multiple Views using Graph Cuts Bastian Goldlücke and Marcus A. Magnor Graphics-Optics-Vision Max-Planck-Institut für Informatik, Saarbrücken, Germany
3D Reconstruction through Segmentation of Multi-View Image Sequences
 3D Reconstruction through Segmentation of Multi-View Image Sequences Carlos Leung and Brian C. Lovell Intelligent Real-Time Imaging and Sensing Group School of Information Technology and Electrical Engineering
3D Reconstruction through Segmentation of Multi-View Image Sequences Carlos Leung and Brian C. Lovell Intelligent Real-Time Imaging and Sensing Group School of Information Technology and Electrical Engineering
Variational Shape and Reflectance Estimation under Changing Light and Viewpoints
 Variational Shape and Reflectance Estimation under Changing Light and Viewpoints Neil Birkbeck 1, Dana Cobzas 1, Martin Jagersand 1, and Peter Sturm 2 1 Computer Science, University of Alberta, Canada
Variational Shape and Reflectance Estimation under Changing Light and Viewpoints Neil Birkbeck 1, Dana Cobzas 1, Martin Jagersand 1, and Peter Sturm 2 1 Computer Science, University of Alberta, Canada
Dr. Ulas Bagci
 Lecture 9: Deformable Models and Segmentation CAP-Computer Vision Lecture 9-Deformable Models and Segmentation Dr. Ulas Bagci bagci@ucf.edu Lecture 9: Deformable Models and Segmentation Motivation A limitation
Lecture 9: Deformable Models and Segmentation CAP-Computer Vision Lecture 9-Deformable Models and Segmentation Dr. Ulas Bagci bagci@ucf.edu Lecture 9: Deformable Models and Segmentation Motivation A limitation
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Photometric Bundle Adjustment for Dense Multi-View 3D Modeling
 Photometric Bundle Adjustment for Dense Multi-View 3D Modeling Amaël Delaunoy ETH Zürich Amael.Delaunoy@inf.ethz.ch Marc Pollefeys ETH Zürich Marc.Pollefeys@inf.ethz.ch hal-00985811, version 1-30 Apr 2014
Photometric Bundle Adjustment for Dense Multi-View 3D Modeling Amaël Delaunoy ETH Zürich Amael.Delaunoy@inf.ethz.ch Marc Pollefeys ETH Zürich Marc.Pollefeys@inf.ethz.ch hal-00985811, version 1-30 Apr 2014
Multi-Label Moves for Multi-Label Energies
 Multi-Label Moves for Multi-Label Energies Olga Veksler University of Western Ontario some work is joint with Olivier Juan, Xiaoqing Liu, Yu Liu Outline Review multi-label optimization with graph cuts
Multi-Label Moves for Multi-Label Energies Olga Veksler University of Western Ontario some work is joint with Olivier Juan, Xiaoqing Liu, Yu Liu Outline Review multi-label optimization with graph cuts
Variational Multiframe Stereo in the Presence of Specular Reflections
 Variational Multiframe Stereo in the Presence of Specular Reflections Hailin Jin Anthony J. Yezzi Stefano Soatto Electrical Engineering, Washington University, Saint Louis, MO 6330 Electrical and Computer
Variational Multiframe Stereo in the Presence of Specular Reflections Hailin Jin Anthony J. Yezzi Stefano Soatto Electrical Engineering, Washington University, Saint Louis, MO 6330 Electrical and Computer
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Multi-View Stereo via Graph Cuts on the Dual of an Adaptive Tetrahedral Mesh
 Multi-View Stereo via Graph Cuts on the Dual of an Adaptive Tetrahedral Mesh Sudipta N. Sinha Philippos Mordohai Marc Pollefeys Department of Computer Science, UNC Chapel Hill, USA Abstract We formulate
Multi-View Stereo via Graph Cuts on the Dual of an Adaptive Tetrahedral Mesh Sudipta N. Sinha Philippos Mordohai Marc Pollefeys Department of Computer Science, UNC Chapel Hill, USA Abstract We formulate
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
Spacetime-coherent Geometry Reconstruction from Multiple Video Streams
 Spacetime-coherent Geometry Reconstruction from Multiple Video Streams Marcus Magnor and Bastian Goldlücke MPI Informatik Saarbrücken, Germany magnor@mpi-sb.mpg.de Abstract By reconstructing time-varying
Spacetime-coherent Geometry Reconstruction from Multiple Video Streams Marcus Magnor and Bastian Goldlücke MPI Informatik Saarbrücken, Germany magnor@mpi-sb.mpg.de Abstract By reconstructing time-varying
Multiple Motion and Occlusion Segmentation with a Multiphase Level Set Method
 Multiple Motion and Occlusion Segmentation with a Multiphase Level Set Method Yonggang Shi, Janusz Konrad, W. Clem Karl Department of Electrical and Computer Engineering Boston University, Boston, MA 02215
Multiple Motion and Occlusion Segmentation with a Multiphase Level Set Method Yonggang Shi, Janusz Konrad, W. Clem Karl Department of Electrical and Computer Engineering Boston University, Boston, MA 02215
Rate-distortion Optimized Progressive 3D Reconstruction from Multi-view Images
 Rate-distortion Optimized Progressive 3D Reconstruction from Multi-view Images Viet Nam Nghiem, Jianfei Cai, Jianmin Zheng School of Computer Engineering Nanyang Technological University, Singapore Email:
Rate-distortion Optimized Progressive 3D Reconstruction from Multi-view Images Viet Nam Nghiem, Jianfei Cai, Jianmin Zheng School of Computer Engineering Nanyang Technological University, Singapore Email:
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces.
 weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
Segmentation with non-linear constraints on appearance, complexity, and geometry
 IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model
 Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model Shohei Nobuhara Takashi Matsuyama Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501, Japan {nob, tm}@vision.kuee.kyoto-u.ac.jp
Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model Shohei Nobuhara Takashi Matsuyama Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501, Japan {nob, tm}@vision.kuee.kyoto-u.ac.jp
Shape from the Light Field Boundary
 Appears in: Proc. CVPR'97, pp.53-59, 997. Shape from the Light Field Boundary Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 4627-226
Appears in: Proc. CVPR'97, pp.53-59, 997. Shape from the Light Field Boundary Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 4627-226
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
An Active Contour Model without Edges
 An Active Contour Model without Edges Tony Chan and Luminita Vese Department of Mathematics, University of California, Los Angeles, 520 Portola Plaza, Los Angeles, CA 90095-1555 chan,lvese@math.ucla.edu
An Active Contour Model without Edges Tony Chan and Luminita Vese Department of Mathematics, University of California, Los Angeles, 520 Portola Plaza, Los Angeles, CA 90095-1555 chan,lvese@math.ucla.edu
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Dense Matching of Multiple Wide-baseline Views
 Dense Matching of Multiple Wide-baseline Views Christoph Strecha KU Leuven Belgium firstname.surname@esat.kuleuven.ac.be Tinne Tuytelaars KU Leuven Belgium Luc Van Gool KU Leuven / ETH Zürich Belgium /
Dense Matching of Multiple Wide-baseline Views Christoph Strecha KU Leuven Belgium firstname.surname@esat.kuleuven.ac.be Tinne Tuytelaars KU Leuven Belgium Luc Van Gool KU Leuven / ETH Zürich Belgium /
Graph Cuts in Vision and Graphics: Theories and Applications
 In Handbook of Mathematical Models in Computer Vision, Springer, 2006 p.1 Graph Cuts in Vision and Graphics: Theories and Applications Yuri Boykov and Olga Veksler Computer Science, The University of Western
In Handbook of Mathematical Models in Computer Vision, Springer, 2006 p.1 Graph Cuts in Vision and Graphics: Theories and Applications Yuri Boykov and Olga Veksler Computer Science, The University of Western
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
USING ONE GRAPH-CUT TO FUSE MULTIPLE CANDIDATE MAPS IN DEPTH ESTIMATION
 USING ONE GRAPH-CUT TO FUSE MULTIPLE CANDIDATE MAPS IN DEPTH ESTIMATION F. Pitié Sigmedia Group, Trinity College Dublin, fpitie@mee.tcd.ie Abstract Graph-cut techniques for depth and disparity estimations
USING ONE GRAPH-CUT TO FUSE MULTIPLE CANDIDATE MAPS IN DEPTH ESTIMATION F. Pitié Sigmedia Group, Trinity College Dublin, fpitie@mee.tcd.ie Abstract Graph-cut techniques for depth and disparity estimations
Algorithms for Markov Random Fields in Computer Vision
 Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
Motion Estimation (II) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (II) Ce Liu celiu@microsoft.com Microsoft Research New England Last time Motion perception Motion representation Parametric motion: Lucas-Kanade T I x du dv = I x I T x I y I x T I y
Motion Estimation (II) Ce Liu celiu@microsoft.com Microsoft Research New England Last time Motion perception Motion representation Parametric motion: Lucas-Kanade T I x du dv = I x I T x I y I x T I y
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video
 Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Multi-View Reconstruction Preserving Weakly-Supported Surfaces
 Multi-View Reconstruction Preserving Weakly-Supported Surfaces Michal Jancosek and Tomas Pajdla Center for Machine Perception, Department of Cybernetics Faculty of Elec. Eng., Czech Technical University
Multi-View Reconstruction Preserving Weakly-Supported Surfaces Michal Jancosek and Tomas Pajdla Center for Machine Perception, Department of Cybernetics Faculty of Elec. Eng., Czech Technical University
Photoflux Maximizing Shapes
 Univ. of Western Ontario, CS Tech. Rep. #670, ISBN-13: 978-0-7714-2580-5, May 3, 2006 p.1 Photoflux Maximizing Shapes Yuri Boykov, Victor Lempitsky Abstract Our work was inspired by recent advances in
Univ. of Western Ontario, CS Tech. Rep. #670, ISBN-13: 978-0-7714-2580-5, May 3, 2006 p.1 Photoflux Maximizing Shapes Yuri Boykov, Victor Lempitsky Abstract Our work was inspired by recent advances in
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
An Occupancy Depth Generative Model of Multi-view Images
 An Occupancy Depth Generative Model of Multi-view Images Pau Gargallo, Peter Sturm, and Sergi Pujades INRIA Rhône-Alpes and Laboratoire Jean Kuntzmann, France name.surname@inrialpes.fr Abstract. This paper
An Occupancy Depth Generative Model of Multi-view Images Pau Gargallo, Peter Sturm, and Sergi Pujades INRIA Rhône-Alpes and Laboratoire Jean Kuntzmann, France name.surname@inrialpes.fr Abstract. This paper
CAP5415-Computer Vision Lecture 13-Image/Video Segmentation Part II. Dr. Ulas Bagci
 CAP-Computer Vision Lecture -Image/Video Segmentation Part II Dr. Ulas Bagci bagci@ucf.edu Labeling & Segmentation Labeling is a common way for modeling various computer vision problems (e.g. optical flow,
CAP-Computer Vision Lecture -Image/Video Segmentation Part II Dr. Ulas Bagci bagci@ucf.edu Labeling & Segmentation Labeling is a common way for modeling various computer vision problems (e.g. optical flow,
The Level Set Method. Lecture Notes, MIT J / 2.097J / 6.339J Numerical Methods for Partial Differential Equations
 The Level Set Method Lecture Notes, MIT 16.920J / 2.097J / 6.339J Numerical Methods for Partial Differential Equations Per-Olof Persson persson@mit.edu March 7, 2005 1 Evolving Curves and Surfaces Evolving
The Level Set Method Lecture Notes, MIT 16.920J / 2.097J / 6.339J Numerical Methods for Partial Differential Equations Per-Olof Persson persson@mit.edu March 7, 2005 1 Evolving Curves and Surfaces Evolving
Level lines based disocclusion
 Level lines based disocclusion Simon Masnou Jean-Michel Morel CEREMADE CMLA Université Paris-IX Dauphine Ecole Normale Supérieure de Cachan 75775 Paris Cedex 16, France 94235 Cachan Cedex, France Abstract
Level lines based disocclusion Simon Masnou Jean-Michel Morel CEREMADE CMLA Université Paris-IX Dauphine Ecole Normale Supérieure de Cachan 75775 Paris Cedex 16, France 94235 Cachan Cedex, France Abstract
Outline. Level Set Methods. For Inverse Obstacle Problems 4. Introduction. Introduction. Martin Burger
 For Inverse Obstacle Problems Martin Burger Outline Introduction Optimal Geometries Inverse Obstacle Problems & Shape Optimization Sensitivity Analysis based on Gradient Flows Numerical Methods University
For Inverse Obstacle Problems Martin Burger Outline Introduction Optimal Geometries Inverse Obstacle Problems & Shape Optimization Sensitivity Analysis based on Gradient Flows Numerical Methods University
3D photography. Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15
 3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
Stereo Vision II: Dense Stereo Matching
 Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Submitted by Wesley Snyder, Ph.D. Department of Electrical and Computer Engineering. North Carolina State University. February 29 th, 2004.
 Segmentation using Multispectral Adaptive Contours Final Report To U.S. Army Research Office On contract #DAAD-19-03-1-037 Submitted by Wesley Snyder, Ph.D. Department of Electrical and Computer Engineering
Segmentation using Multispectral Adaptive Contours Final Report To U.S. Army Research Office On contract #DAAD-19-03-1-037 Submitted by Wesley Snyder, Ph.D. Department of Electrical and Computer Engineering
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Markov Networks in Computer Vision
 Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
Combining Monocular Geometric Cues with Traditional Stereo Cues for Consumer Camera Stereo
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Combining Monocular Geometric
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Combining Monocular Geometric
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
3D and Appearance Modeling from Images
 3D and Appearance Modeling from Images Peter Sturm, Amael Delaunoy, Pau Gargallo, Emmanuel Prados, Kuk-Jin Yoon To cite this version: Peter Sturm, Amael Delaunoy, Pau Gargallo, Emmanuel Prados, Kuk-Jin
3D and Appearance Modeling from Images Peter Sturm, Amael Delaunoy, Pau Gargallo, Emmanuel Prados, Kuk-Jin Yoon To cite this version: Peter Sturm, Amael Delaunoy, Pau Gargallo, Emmanuel Prados, Kuk-Jin
Stereo Matching. Stereo Matching. Face modeling. Z-keying: mix live and synthetic
 Stereo Matching Stereo Matching Given two or more images of the same scene or object, compute a representation of its shape? Computer Vision CSE576, Spring 2005 Richard Szeliski What are some possible
Stereo Matching Stereo Matching Given two or more images of the same scene or object, compute a representation of its shape? Computer Vision CSE576, Spring 2005 Richard Szeliski What are some possible
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
Markov Networks in Computer Vision. Sargur Srihari
 Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is