Computer Vision at Cambridge: Reconstruction,Registration and Recognition
|
|
|
- Jody Reed
- 6 years ago
- Views:
Transcription
1 Computer Vision at Cambridge: Reconstruction,Registration and Recognition Roberto Cipolla Research team
2 Cognitive Systems Engineering Cognitive Systems Engineering
3 Introduction New applications Computer vision has now found a place in consumer products Mobile phones and PDAs Games Cars Image and video search Internet and shopping


4 Smart erase on a mobile phone Introduction
5 I. Reconstruction: Recovery of accurate 3D shape from uncalibrated images Cipolla and Blake 1992 Cipolla and Giblin 1999 Mendonca, Wong and Cipolla Vogiatzis, Hernandez and Cipolla Hernandez, Brostow and Cipolla 2007

6 Digital Pygmalion the myth






7 Digital Pygamlion Project



8 Scanning technologies Laser range finders Very accurate Very expensive Complicated to use Minolta Michelangelo project MENSI 3D Scanner

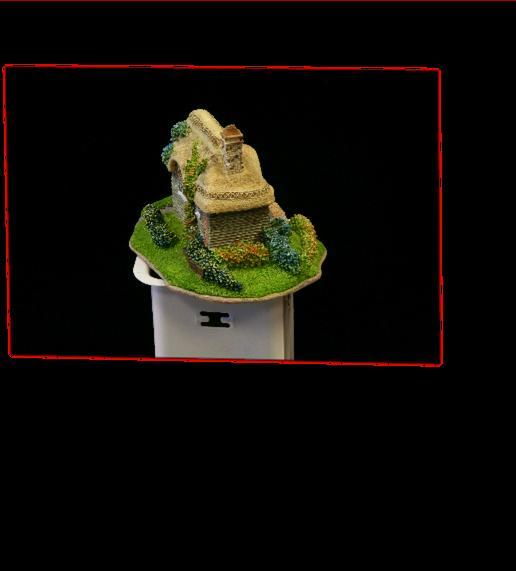
9 3D models We need a way to get them that is practical fast non-intrusive low cost



10 Stereo vision 3D point




11 3D Models
12 1. Camera motion and multiview stereo Cipolla and Blake 1992 Cipolla and Giblin 1999 Mendonca, Wong and Cipolla Hernandez, Schmidt and Cipolla 2007 Vogiatzis, Hernandez and Cipolla 2007

13 Input Images

14 Recovery of camera motion Input images Feature extraction Feature matching Bundle adjustment
15 2. Probabilistic 3D segmentation using graph cuts Vogiatzis, Hernandez and Cipolla 2007

16 Probabilistic 3D segmentation








17 3D models








18 3D models
19 Advantages Low cost Non intrusive Accurate Simple Can work with about 5-30 images Fast Approximately minutes of computation for these models We believe we can bring this down to minutes
20 Application requirements In order of importance 1. Simplicity 2. Cost 3. Visual accuracy 4. Intrusiveness 5. Speed 6. Robustness 7. Geometric accuracy ~25 images, no calibration Digital camera + PC Sub-pixel Completely non-intrusive Recently down to 15min tranparency, deformations 1 part in 1000
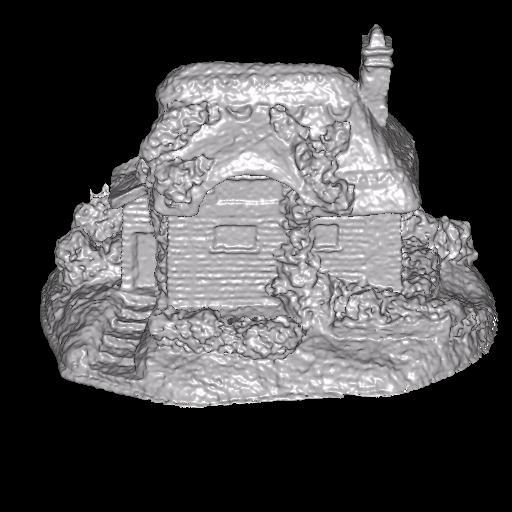
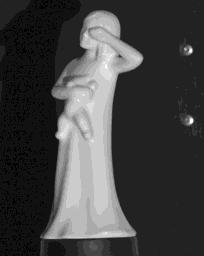
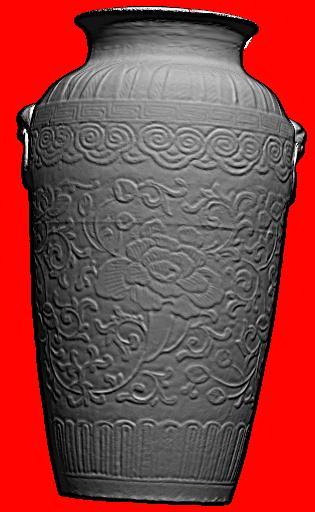
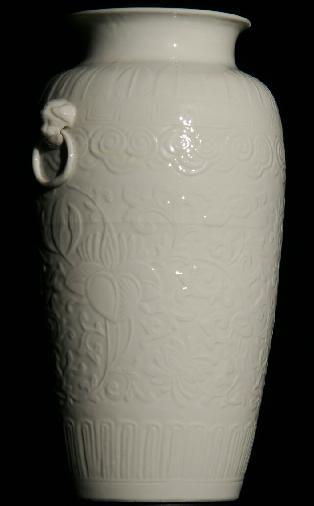
21 3.Multiview photometric stereo Vogiatzis, Hernandez and Cipolla 2006
22 Untextured objects Almost impossible to establish correspondence
23 Untextured objects Changing lighting uncovers fine geometric detail Assumptions: Single, distant light-source Silhouettes can be extracted No texture, single colour





24 Image acquisition setup

25 Surface Evolution: 3D Mesh Evolve mesh until it is predicted appearance under recovered illumination matches images
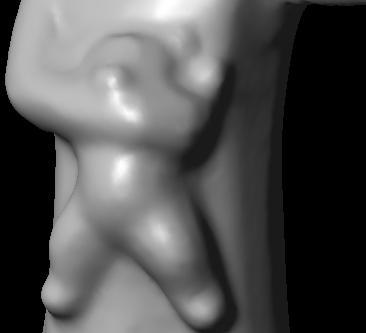








26 3D Models
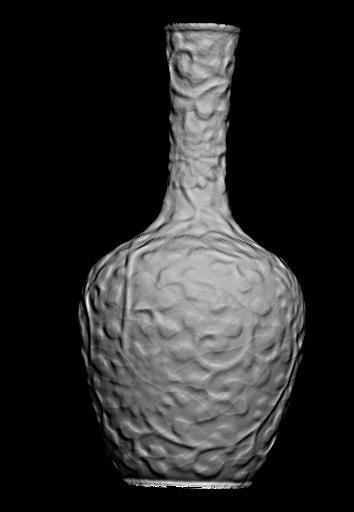


27 3D Models
28 3D Models

29 3D Models



30 3D Models



31 3D Models
32 II. Registration: Target detection and pose estimation
33 4. Registration: Where am I? What am I looking at? Johansson and Cipolla 2002 Robertson and Cipolla 2004

34 Where I am? Determine pose from single image by matching

35 Register database view

36 Registration of input image
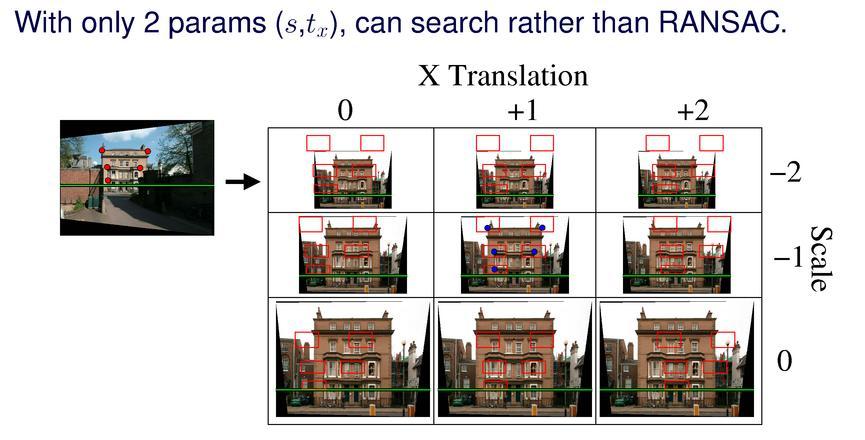
37 Matching


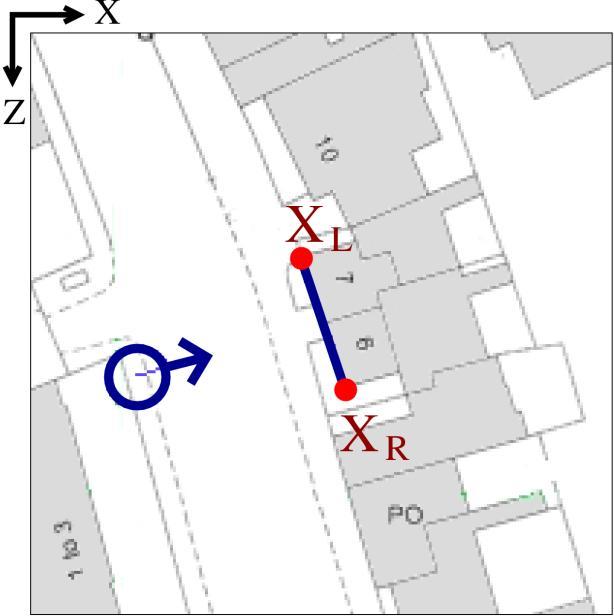

38 Localisation of query view


39 Image-based localisation


40 Image-based localisation


41 Image-based localisation
42 5. Finding 2D shapes and applications to HCI Stenger, Thayananthan, Torr and Cipolla 2003 Williams, Blake and Cipolla 2003 and 2006 Ramanan, Fitzgibbon and Cipolla



43 Matching shape templates Oriented Oriented Canny Distance Edge Transform Detector
44 Matching shape templates Oriented Chamfer Matching


45 Hand detection system

46 Tracking - 3D mouse

47 Real-time visual controller for Dasher

48 People and pose detection
49 People and pose detection
50 III. Object recognition and machine learning Shotton, Blake and Cipolla Kim, Kittler and Cipolla 2006 Johnson and Cipolla 2007



















51 road Overview image classification categorical object detection horses airplanes background semantic segmentation tree bicycle building grass dog car sky building road
52 6. Using interest points and visual words Johnson and Cipolla 2007


53 Image matching
54 7. Using contour and shape Shotton, Blake and Cipolla





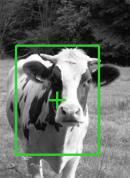
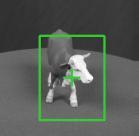
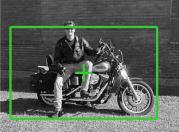
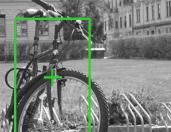
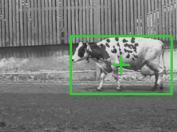
55 Supervised learning Learn to recognise images of a particular class, localised in space and scale i.e. find the horse/cow/car etc! Desired Results


56 Cognitive Systems Engineering Learning and Adaptability : : } : :

57 Object Model F σ p x F = (T, p,,,, a, b)














58 Retraining Approach Dataset Training set Test set Build Codebook Learn Classifier Test Classifier Results
59 Unsegmented Segmented Dictionary of contour fragments
 (b) (c) (d) (e) (f)")
60 Unsegmented Segmented Shape (a) (b) (c) (d) (e) (f) Exemplar Centroid votes Exemplar Centroid votes Exemplar Centroid votes

61 Segmented Unsegmented Shape Exemplar Centroid votes Exemplar Sub-cluster members Centroid votes





















62

































63




























64
65 8. Using texture and contour Shotton, Blake and Cipolla

66 Texture-based segmentation




67 Extracting textons clustering and assignment input image filter bank texton map (colours texton indices)


68 Extracted texton dictionary


")



69 Use with contour shape model sr 2 sr 3 sr 1 (x, s) t 1 t 2 textons
 (3) (4) (5) (6) (7) (8) (9)")
70 Learned contour and texture (1) (2) (3) (4) (5) (6) (7) (8) (9) (24)
71 True Positive Rate Performance ROC AUC Canny BEL False Positive Rate
72 Recall Performance RP AUC Canny BEL False Positives Per Image


73 Performance
74 9. Detection and tracking of people Brostow and Cipolla 2006 Bucciarelli and Cipolla 2007


75 Pedestrian detection

76 Tracking people in crowds Cognitive Systems Engineering
77 10. Recognition in video using CCA Arandjelovic and Cipolla 2006 Kim, Wong and Cipolla

78 Face recognition Overcome appearance variations due to: Lighting condition Scale, pose, motion pattern


79 Automatic cast listing Problem difficulties


80 : Automatic cast listing Simple clustering results
81 Action recognition
82 Action recognition Boxing Hand clapping Hand waving Jogging Running Walking
83 Summary Image registration and matching 3D shape from uncalibrated images. Object detection and tracking
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Learning an Alphabet of Shape and Appearance for Multi-Class Object Detection
 Learning an Alphabet of Shape and Appearance for Multi-Class Object Detection Andreas Opelt, Axel Pinz and Andrew Zisserman 09-June-2009 Irshad Ali (Department of CS, AIT) 09-June-2009 1 / 20 Object class
Learning an Alphabet of Shape and Appearance for Multi-Class Object Detection Andreas Opelt, Axel Pinz and Andrew Zisserman 09-June-2009 Irshad Ali (Department of CS, AIT) 09-June-2009 1 / 20 Object class
Learning Class-specific Edges for Object Detection and Segmentation
 Learning Class-specific Edges for Object Detection and Segmentation Mukta Prasad 1, Andrew Zisserman 1, Andrew Fitzgibbon 2, M. Pawan Kumar 3 and P. H. S. Torr 3 http://www.robots.ox.ac.uk/ {mukta,vgg}
Learning Class-specific Edges for Object Detection and Segmentation Mukta Prasad 1, Andrew Zisserman 1, Andrew Fitzgibbon 2, M. Pawan Kumar 3 and P. H. S. Torr 3 http://www.robots.ox.ac.uk/ {mukta,vgg}
Multi-view photometric stereo
 1 Multi-view photometric stereo Carlos Hernández, George Vogiatzis, Roberto Cipolla 2 Abstract This paper addresses the problem of obtaining complete, detailed reconstructions of textureless shiny objects.
1 Multi-view photometric stereo Carlos Hernández, George Vogiatzis, Roberto Cipolla 2 Abstract This paper addresses the problem of obtaining complete, detailed reconstructions of textureless shiny objects.
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Multiview Photometric Stereo
 548 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 30, NO. 3, MARCH 2008 Multiview Photometric Stereo Carlos Hernández, Member, IEEE, George Vogiatzis, Member, IEEE, and Roberto Cipolla,
548 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 30, NO. 3, MARCH 2008 Multiview Photometric Stereo Carlos Hernández, Member, IEEE, George Vogiatzis, Member, IEEE, and Roberto Cipolla,
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
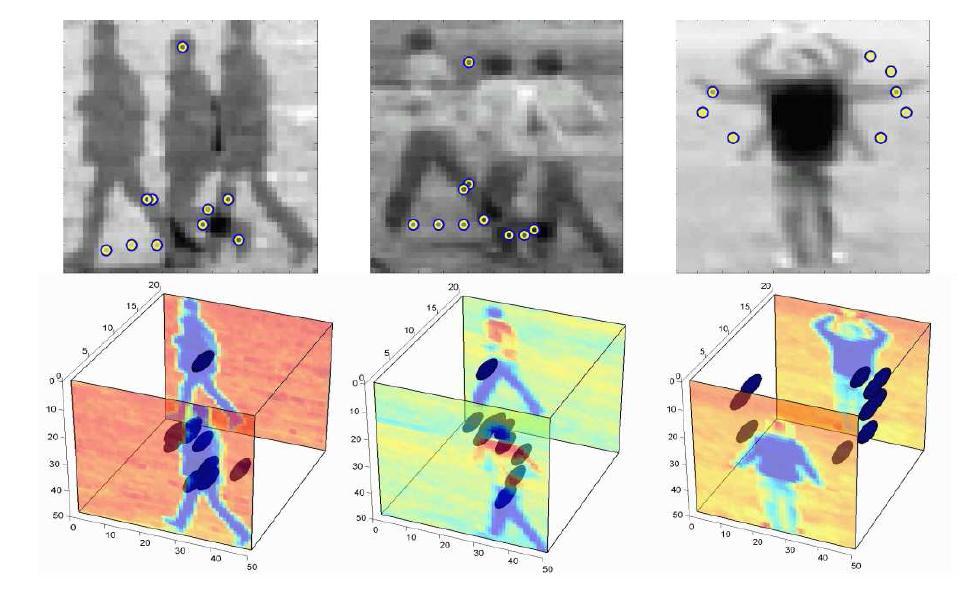
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011
 Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 Auto-initialize a tracking algorithm & recover from failures All human poses,
Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 Auto-initialize a tracking algorithm & recover from failures All human poses,
Why study Computer Vision?
 Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Announcements. Recognition I. Gradient Space (p,q) What is the reflectance map?
 What is the reflectance map?") Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
EVENT DETECTION AND HUMAN BEHAVIOR RECOGNITION. Ing. Lorenzo Seidenari
 EVENT DETECTION AND HUMAN BEHAVIOR RECOGNITION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it What is an Event? Dictionary.com definition: something that occurs in a certain place during a particular
EVENT DETECTION AND HUMAN BEHAVIOR RECOGNITION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it What is an Event? Dictionary.com definition: something that occurs in a certain place during a particular
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE
 PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
Snakes, level sets and graphcuts. (Deformable models)
") INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Real-Time Model-Based Hand Localization for Unsupervised Palmar Image Acquisition
 Real-Time Model-Based Hand Localization for Unsupervised Palmar Image Acquisition Ivan Fratric 1, Slobodan Ribaric 1 1 University of Zagreb, Faculty of Electrical Engineering and Computing, Unska 3, 10000
Real-Time Model-Based Hand Localization for Unsupervised Palmar Image Acquisition Ivan Fratric 1, Slobodan Ribaric 1 1 University of Zagreb, Faculty of Electrical Engineering and Computing, Unska 3, 10000
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Key Developments in Human Pose Estimation for Kinect
 Key Developments in Human Pose Estimation for Kinect Pushmeet Kohli and Jamie Shotton Abstract The last few years have seen a surge in the development of natural user interfaces. These interfaces do not
Key Developments in Human Pose Estimation for Kinect Pushmeet Kohli and Jamie Shotton Abstract The last few years have seen a surge in the development of natural user interfaces. These interfaces do not
Efficiently Combining Contour and Texture Cues for Object Recognition
 Efficiently Combining Contour and Texture Cues for Object Recognition Jamie Shotton Andrew Blake Roberto Cipolla Microsoft Research Cambridge University of Cambridge Abstract This paper proposes an efficient
Efficiently Combining Contour and Texture Cues for Object Recognition Jamie Shotton Andrew Blake Roberto Cipolla Microsoft Research Cambridge University of Cambridge Abstract This paper proposes an efficient
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Why study Computer Vision?
 Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Computer Vision Course Lecture 04. Template Matching Image Pyramids. Ceyhun Burak Akgül, PhD cba-research.com. Spring 2015 Last updated 11/03/2015
 Computer Vision Course Lecture 04 Template Matching Image Pyramids Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 11/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Computer Vision Course Lecture 04 Template Matching Image Pyramids Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 11/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Geometric Registration for Deformable Shapes 1.1 Introduction
 Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
12/3/2009. What is Computer Vision? Applications. Application: Assisted driving Pedestrian and car detection. Application: Improving online search
 Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
An Object Detection System using Image Reconstruction with PCA
 An Object Detection System using Image Reconstruction with PCA Luis Malagón-Borja and Olac Fuentes Instituto Nacional de Astrofísica Óptica y Electrónica, Puebla, 72840 Mexico jmb@ccc.inaoep.mx, fuentes@inaoep.mx
An Object Detection System using Image Reconstruction with PCA Luis Malagón-Borja and Olac Fuentes Instituto Nacional de Astrofísica Óptica y Electrónica, Puebla, 72840 Mexico jmb@ccc.inaoep.mx, fuentes@inaoep.mx
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Object Detection Using Principal Contour Fragments
 Object Detection Using Principal Contour Fragments Changhai Xu Department of Computer Science University of Texas at Austin University Station, Austin, TX 7872 changhai@cs.utexas.edu Benjamin Kuipers Computer
Object Detection Using Principal Contour Fragments Changhai Xu Department of Computer Science University of Texas at Austin University Station, Austin, TX 7872 changhai@cs.utexas.edu Benjamin Kuipers Computer
Gaze interaction (2): models and technologies
: models and technologies") Gaze interaction (2): models and technologies Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano boccignone@dsi.unimi.it http://homes.dsi.unimi.it/~boccignone/l
Gaze interaction (2): models and technologies Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano boccignone@dsi.unimi.it http://homes.dsi.unimi.it/~boccignone/l
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Detecting and Segmenting Humans in Crowded Scenes
 Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Detection and Recognition of Objects in a Real Time
 Detection and Recognition of Objects in a Real Time 1 Akshatha N S, 2 Dr. Chandrashekar M Patil 1 PG Student, 2 Professor 1 Department of Electronics and Communication, 1 VVCE, Mysore, India Abstract -
Detection and Recognition of Objects in a Real Time 1 Akshatha N S, 2 Dr. Chandrashekar M Patil 1 PG Student, 2 Professor 1 Department of Electronics and Communication, 1 VVCE, Mysore, India Abstract -
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Discriminative Object Class Models of Appearance and Shape by Correlatons
 Discriminative Object Class Models of Appearance and Shape by Correlatons S. Savarese, J. Winn, A. Criminisi University of Illinois at Urbana-Champaign Microsoft Research Ltd., Cambridge, CB3 0FB, United
Discriminative Object Class Models of Appearance and Shape by Correlatons S. Savarese, J. Winn, A. Criminisi University of Illinois at Urbana-Champaign Microsoft Research Ltd., Cambridge, CB3 0FB, United
A Hierarchical Compositional System for Rapid Object Detection
 A Hierarchical Compositional System for Rapid Object Detection Long Zhu and Alan Yuille Department of Statistics University of California at Los Angeles Los Angeles, CA 90095 {lzhu,yuille}@stat.ucla.edu
A Hierarchical Compositional System for Rapid Object Detection Long Zhu and Alan Yuille Department of Statistics University of California at Los Angeles Los Angeles, CA 90095 {lzhu,yuille}@stat.ucla.edu
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Silhouette Coherence for Camera Calibration under Circular Motion
 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Appendix I 2 I. ERROR ANALYSIS OF THE SILHOUETTE COHERENCE AS A FUNCTION OF SILHOUETTE
Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Appendix I 2 I. ERROR ANALYSIS OF THE SILHOUETTE COHERENCE AS A FUNCTION OF SILHOUETTE
Texton Clustering for Local Classification using Scene-Context Scale
 Texton Clustering for Local Classification using Scene-Context Scale Yousun Kang Tokyo Polytechnic University Atsugi, Kanakawa, Japan 243-0297 Email: yskang@cs.t-kougei.ac.jp Sugimoto Akihiro National
Texton Clustering for Local Classification using Scene-Context Scale Yousun Kang Tokyo Polytechnic University Atsugi, Kanakawa, Japan 243-0297 Email: yskang@cs.t-kougei.ac.jp Sugimoto Akihiro National
Ulas Bagci
 CAP5415-Computer Vision Lecture 14-Decision Forests for Computer Vision Ulas Bagci bagci@ucf.edu 1 Readings Slide Credits: Criminisi and Shotton Z. Tu R.Cipolla 2 Common Terminologies Randomized Decision
CAP5415-Computer Vision Lecture 14-Decision Forests for Computer Vision Ulas Bagci bagci@ucf.edu 1 Readings Slide Credits: Criminisi and Shotton Z. Tu R.Cipolla 2 Common Terminologies Randomized Decision
Fusing shape and appearance information for object category detection
 1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
Automatic Dense Semantic Mapping From Visual Street-level Imagery
 Automatic Dense Semantic Mapping From Visual Street-level Imagery Sunando Sengupta [1], Paul Sturgess [1], Lubor Ladicky [2], Phillip H.S. Torr [1] [1] Oxford Brookes University [2] Visual Geometry Group,
Automatic Dense Semantic Mapping From Visual Street-level Imagery Sunando Sengupta [1], Paul Sturgess [1], Lubor Ladicky [2], Phillip H.S. Torr [1] [1] Oxford Brookes University [2] Visual Geometry Group,
3D Reconstruction of Human Bodies with Clothes from Un-calibrated Monocular Video Images
 3D Reconstruction of Human Bodies with Clothes from Un-calibrated Monocular Video Images presented by Tran Cong Thien Qui PhD Candidate School of Computer Engineering & Institute for Media Innovation Supervisor:
3D Reconstruction of Human Bodies with Clothes from Un-calibrated Monocular Video Images presented by Tran Cong Thien Qui PhD Candidate School of Computer Engineering & Institute for Media Innovation Supervisor:
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Report: Reducing the error rate of a Cat classifier
 Report: Reducing the error rate of a Cat classifier Raphael Sznitman 6 August, 2007 Abstract The following report discusses my work at the IDIAP from 06.2007 to 08.2007. This work had for objective to
Report: Reducing the error rate of a Cat classifier Raphael Sznitman 6 August, 2007 Abstract The following report discusses my work at the IDIAP from 06.2007 to 08.2007. This work had for objective to
Incremental Learning of Object Detectors Using a Visual Shape Alphabet
 Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
High-Level Computer Vision
 High-Level Computer Vision Detection of classes of objects (faces, motorbikes, trees, cheetahs) in images Recognition of specific objects such as George Bush or machine part #45732 Classification of images
High-Level Computer Vision Detection of classes of objects (faces, motorbikes, trees, cheetahs) in images Recognition of specific objects such as George Bush or machine part #45732 Classification of images
Exploiting scene constraints to improve object detection algorithms for industrial applications
 Exploiting scene constraints to improve object detection algorithms for industrial applications PhD Public Defense Steven Puttemans Promotor: Toon Goedemé 2 A general introduction Object detection? Help
Exploiting scene constraints to improve object detection algorithms for industrial applications PhD Public Defense Steven Puttemans Promotor: Toon Goedemé 2 A general introduction Object detection? Help
Talk plan. 3d model. Applications: cultural heritage 5/9/ d shape reconstruction from photographs: a Multi-View Stereo approach
 Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Introduction to behavior-recognition and object tracking
 Introduction to behavior-recognition and object tracking Xuan Mo ipal Group Meeting April 22, 2011 Outline Motivation of Behavior-recognition Four general groups of behaviors Core technologies Future direction
Introduction to behavior-recognition and object tracking Xuan Mo ipal Group Meeting April 22, 2011 Outline Motivation of Behavior-recognition Four general groups of behaviors Core technologies Future direction
A Boundary-Fragment-Model for Object Detection
 A Boundary-Fragment-Model for Object Detection Andreas Opelt 1,AxelPinz 1, and Andrew Zisserman 2 1 Vision-based Measurement Group, Inst. of El. Measurement and Meas. Sign. Proc. Graz, University of Technology,
A Boundary-Fragment-Model for Object Detection Andreas Opelt 1,AxelPinz 1, and Andrew Zisserman 2 1 Vision-based Measurement Group, Inst. of El. Measurement and Meas. Sign. Proc. Graz, University of Technology,
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
PHOG:Photometric and geometric functions for textured shape retrieval. Presentation by Eivind Kvissel
 PHOG:Photometric and geometric functions for textured shape retrieval Presentation by Eivind Kvissel Introduction This paper is about tackling the issue of textured 3D object retrieval. Thanks to advances
PHOG:Photometric and geometric functions for textured shape retrieval Presentation by Eivind Kvissel Introduction This paper is about tackling the issue of textured 3D object retrieval. Thanks to advances
Towards the completion of assignment 1
 Towards the completion of assignment 1 What to do for calibration What to do for point matching What to do for tracking What to do for GUI COMPSCI 773 Feature Point Detection Why study feature point detection?
Towards the completion of assignment 1 What to do for calibration What to do for point matching What to do for tracking What to do for GUI COMPSCI 773 Feature Point Detection Why study feature point detection?
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Mapping textures on 3D geometric model using reflectance image
 Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Visual Object Recognition
 Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Image Classification pipeline. Lecture 2-1
 Lecture 2: Image Classification pipeline Lecture 2-1 Administrative: Piazza For questions about midterm, poster session, projects, etc, use Piazza! SCPD students: Use your @stanford.edu address to register
Lecture 2: Image Classification pipeline Lecture 2-1 Administrative: Piazza For questions about midterm, poster session, projects, etc, use Piazza! SCPD students: Use your @stanford.edu address to register
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
People Tracking and Segmentation Using Efficient Shape Sequences Matching
 People Tracking and Segmentation Using Efficient Shape Sequences Matching Junqiu Wang, Yasushi Yagi, and Yasushi Makihara The Institute of Scientific and Industrial Research, Osaka University 8-1 Mihogaoka,
People Tracking and Segmentation Using Efficient Shape Sequences Matching Junqiu Wang, Yasushi Yagi, and Yasushi Makihara The Institute of Scientific and Industrial Research, Osaka University 8-1 Mihogaoka,
The Analysis of Animate Object Motion using Neural Networks and Snakes
 The Analysis of Animate Object Motion using Neural Networks and Snakes Ken Tabb, Neil Davey, Rod Adams & Stella George e-mail {K.J.Tabb, N.Davey, R.G.Adams, S.J.George}@herts.ac.uk http://www.health.herts.ac.uk/ken/vision/
The Analysis of Animate Object Motion using Neural Networks and Snakes Ken Tabb, Neil Davey, Rod Adams & Stella George e-mail {K.J.Tabb, N.Davey, R.G.Adams, S.J.George}@herts.ac.uk http://www.health.herts.ac.uk/ken/vision/
Block Diagram. Physical World. Image Acquisition. Enhancement and Restoration. Segmentation. Feature Selection/Extraction.
 Block Diagram Physical World Image Acquisition Imaging Image Sampling, Quantization, Compression Image Processing Enhancement and Restoration Segmentation Image Analysis Feature Selection/Extraction Image
Block Diagram Physical World Image Acquisition Imaging Image Sampling, Quantization, Compression Image Processing Enhancement and Restoration Segmentation Image Analysis Feature Selection/Extraction Image
Invariant Features from Interest Point Groups
 Invariant Features from Interest Point Groups Matthew Brown and David Lowe {mbrown lowe}@cs.ubc.ca Department of Computer Science, University of British Columbia, Vancouver, Canada. Abstract This paper
Invariant Features from Interest Point Groups Matthew Brown and David Lowe {mbrown lowe}@cs.ubc.ca Department of Computer Science, University of British Columbia, Vancouver, Canada. Abstract This paper
Real Time Stereo Vision Based Pedestrian Detection Using Full Body Contours
 Real Time Stereo Vision Based Pedestrian Detection Using Full Body Contours Ion Giosan, Sergiu Nedevschi, Silviu Bota Technical University of Cluj-Napoca {Ion.Giosan, Sergiu.Nedevschi, Silviu.Bota}@cs.utcluj.ro
Real Time Stereo Vision Based Pedestrian Detection Using Full Body Contours Ion Giosan, Sergiu Nedevschi, Silviu Bota Technical University of Cluj-Napoca {Ion.Giosan, Sergiu.Nedevschi, Silviu.Bota}@cs.utcluj.ro
차세대지능형자동차를위한신호처리기술 정호기
 차세대지능형자동차를위한신호처리기술 008.08. 정호기 E-mail: hgjung@mando.com hgjung@yonsei.ac.kr 0 . 지능형자동차의미래 ) 단위 system functions 운전자상황인식 얼굴방향인식 시선방향인식 졸음운전인식 운전능력상실인식 차선인식, 전방장애물검출및분류 Lane Keeping System + Adaptive Cruise
차세대지능형자동차를위한신호처리기술 008.08. 정호기 E-mail: hgjung@mando.com hgjung@yonsei.ac.kr 0 . 지능형자동차의미래 ) 단위 system functions 운전자상황인식 얼굴방향인식 시선방향인식 졸음운전인식 운전능력상실인식 차선인식, 전방장애물검출및분류 Lane Keeping System + Adaptive Cruise
Waleed Pervaiz CSE 352
 Waleed Pervaiz CSE 352 Computer Vision is the technology that enables machines to see and obtain information from digital images. It is seen as an integral part of AI in fields such as pattern recognition
Waleed Pervaiz CSE 352 Computer Vision is the technology that enables machines to see and obtain information from digital images. It is seen as an integral part of AI in fields such as pattern recognition
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES
 COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
Sensor Fusion-Based Parking Assist System
 Sensor Fusion-Based Parking Assist System 2014-01-0327 Jaeseob Choi, Eugene Chang, Daejoong Yoon, and Seongsook Ryu Hyundai & Kia Corp. Hogi Jung and Jaekyu Suhr Hanyang Univ. Published 04/01/2014 CITATION:
Sensor Fusion-Based Parking Assist System 2014-01-0327 Jaeseob Choi, Eugene Chang, Daejoong Yoon, and Seongsook Ryu Hyundai & Kia Corp. Hogi Jung and Jaekyu Suhr Hanyang Univ. Published 04/01/2014 CITATION:
A probabilistic distribution approach for the classification of urban roads in complex environments
 A probabilistic distribution approach for the classification of urban roads in complex environments Giovani Bernardes Vitor 1,2, Alessandro Corrêa Victorino 1, Janito Vaqueiro Ferreira 2 1 Automatique,
A probabilistic distribution approach for the classification of urban roads in complex environments Giovani Bernardes Vitor 1,2, Alessandro Corrêa Victorino 1, Janito Vaqueiro Ferreira 2 1 Automatique,
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Tracking People. Tracking People: Context
 Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
The Analysis of Animate Object Motion using Neural Networks and Snakes
 The Analysis of Animate Object Motion using Neural Networks and Snakes Ken Tabb, Neil Davey, Rod Adams & Stella George e-mail {K.J.Tabb, N.Davey, R.G.Adams, S.J.George}@herts.ac.uk http://www.health.herts.ac.uk/ken/vision/
The Analysis of Animate Object Motion using Neural Networks and Snakes Ken Tabb, Neil Davey, Rod Adams & Stella George e-mail {K.J.Tabb, N.Davey, R.G.Adams, S.J.George}@herts.ac.uk http://www.health.herts.ac.uk/ken/vision/
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
Object detection using non-redundant local Binary Patterns
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
Combining Appearance and Structure from Motion Features for Road Scene Understanding
 STURGESS et al.: COMBINING APPEARANCE AND SFM FEATURES 1 Combining Appearance and Structure from Motion Features for Road Scene Understanding Paul Sturgess paul.sturgess@brookes.ac.uk Karteek Alahari karteek.alahari@brookes.ac.uk
STURGESS et al.: COMBINING APPEARANCE AND SFM FEATURES 1 Combining Appearance and Structure from Motion Features for Road Scene Understanding Paul Sturgess paul.sturgess@brookes.ac.uk Karteek Alahari karteek.alahari@brookes.ac.uk
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps
 OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Silhouette Coherence for Camera Calibration under Circular Motion
 1 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Abstract We present a new approach to camera calibration as a part of a complete
1 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Abstract We present a new approach to camera calibration as a part of a complete
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha