Spatially-global integration of closed contours by means of shortest-path in a log-polar representation
|
|
|
- Bertram Carter
- 5 years ago
- Views:
Transcription
1 Spatially-global integration of closed contours by means of shortest-path in a log-polar representation Terry Kwon and Kunal Agrawal, Yunfeng Li, Zygmunt Pizlo Support: National Eye Institute Purdue University 1
2 Outline Introduction Model Experiments Discussion 2
3 Introduction 3


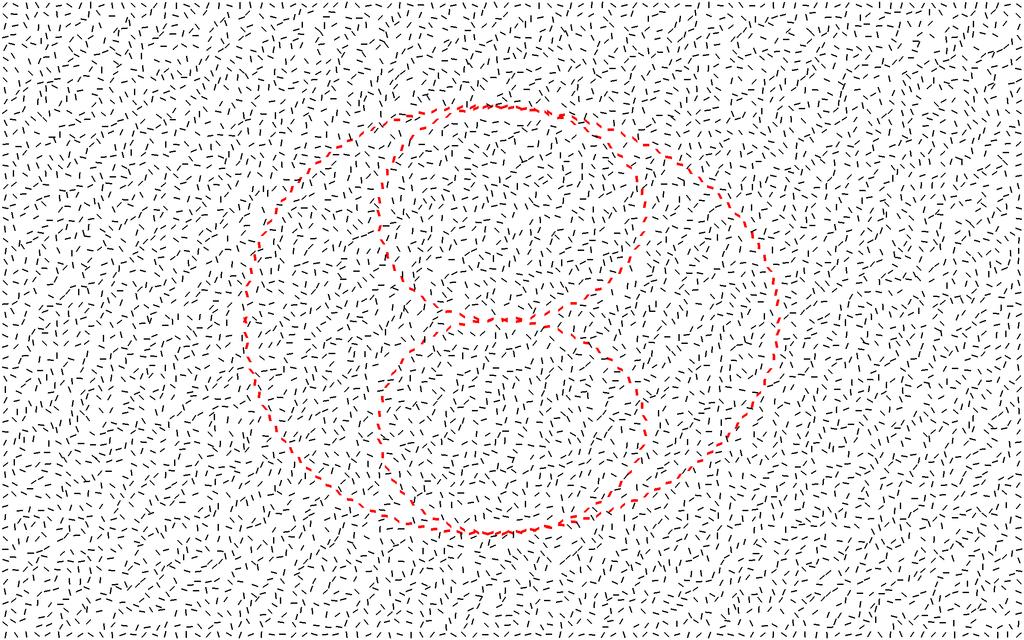
4 Motivation Integrating fragmented, closed contours is difficult because there are many spurious contours. 4
5 Synthetic image illustrating the nature of the problem.
6 Prior models Most prior models, like Sha shua & Ullman s (1988) structural saliency, keep growing the contour based on local smoothness criteria. But these models do not guarantee that the most salient contour will be a closed curve. How to use local computations and guarantee closure? Change the problem s representation and use spatially-global mechanism. 6


7 Log-polar mapping of the retina in area V1 Tootell et al. (1982) A circle on the retina maps into an almost straight line in area V1. 7
8 Log-polar representation A circle on the retina maps into a straight line in area V1. A convex curve on the retina maps into a smooth open curve in area V1. One semi-axis on the retina has two representations in area V1. So, by solving the shortest path problem between a point and itself in the area V1, we (i.e., the visual system) are likely to detect a closed, 8 smooth and convex curve on the retina.
9 Examples of log-polar representation Three squares whose centers coincide with the center of the retina are represented by identical curves in the log-polar coordinates except for a translation along the horizontal or vertical axis. The log-polar representation is deformed by translation on the retina. But, local angles are always preserved (Conformal mapping). 9
10 Model 10
11
12
13

14
15
16 Shortest path model (Model SP) Generate a random polygon Fragment the contour Perturb the orientation of edges Add noise edges Transform back to the Cartesian coordinate Find the shortest (least-cost) path Transform into the log-polar representation 16
17 How the shortest path model works Convert contours to the log-polar representation. The origin of the polar coordinate system is the center of the image (fixation point). Existing edges have cost zero. Interpolated edges have cost equal to the Euclidean distance in the log-polar representation. It is cheaper to go through existing contours. Find the shortest (least cost) path from the starting point to itself. Transform it back to the Cartesian (retinal) coordinates. 17
18 Shortest path model (Model SP) misses concave parts of concave curves Object s contour Fragmented contour Fragmented contour with noise Reconstructed contour Shortest path in LPR Log-polar representation (LPR) 18
")
19 Local interpolation as the front-end helps (Model LI-SP) Fragmented contour Fragmented contour with noise Local Interpolation Reconstructed contour Shortest path in LPR Log-polar representation (LPR) 19
20 Experiment: presented at VSS last year Subjects drew the contours using a stylus. Their contours were very similar to the contours drawn by the model. 20
21 Experiment: presented at VSS this year The effect of the fixation position on detection of curves. 21
22 Effect of fixation points A closed curve is mapped to an open curve as long as the fixation point is inside. If the fixation point is outside, then the closed curve is projected to another closed curve in the log-polar representation. In this case, the shortest path in area V1 will not detect a closed curve on the retina. The model can find the shortest path only when the fixation position is inside. 22
23 Method 4 subjects (one naïve) Egg-like (oval) stimuli: x ±0.04x + y2 4 2 = 1 Fragmented and mixed with noise. 20 of jitter level of the edges in the egg: -25 to -15 or 15 to 25 Moderate level of perturbation to minimize the local interpolation based on smoothness 23
24
25 Procedure We used a signal detection experiment. Each trial started with a fixation cross in the center of the screen. Right after the subject pressed a middle mouse button, the stimulus was shown for 100 msec. The subject was asked to report the direction of the egg with the mouse. A beep was sounded after an incorrect response. 25
26 Types of stimuli Question: How much difference exists between central and peripheral viewing of a closed curve? Confounding factor: Retinal eccentricity To control for this factor, we used big eggs for the central viewing and small eggs for peripheral viewing. 26
27 27
28 Types of stimuli Another confounding factor: number of samples To control for this factor, we used sparse sampling for big eggs and dense sampling for small eggs. 28
29 29
30
31
32
33
34
35
36
37
38
39 Weighted Average of Subjects' Sensitivity d' Dense Sampling Sparse Sampling 1 0 Central Viewing Peripheral 39
40 More results In my poster on Saturday. 40
41 Conclusions The shortest path model in area V1 implements 4 conventional Gestalt principles of perceptual organization: closure, proximity, good continuation and convexity. Local interpolation is the front-end This mechanism operates in the human visual system only when the fixation position is inside the closed curve (center of gravity tendency). Visual system solves a difficult problem by changing the problem s representation. This part of Gestalt s contribution was emphasized by Wertheimer and by Duncker in the context of insight problem solving.
42 Thank you.
Journal of Problem Solving The Role of Problem Representation in Producing Near-Optimal TSP Tours
 Journal of Problem Solving The Role of Problem Representation in Producing Near-Optimal TSP Tours Pierson Fleischer, Sébastien Hélie, and Zygmunt Pizlo Purdue University Correspondence: Correspondence
Journal of Problem Solving The Role of Problem Representation in Producing Near-Optimal TSP Tours Pierson Fleischer, Sébastien Hélie, and Zygmunt Pizlo Purdue University Correspondence: Correspondence
What is Computer Vision?
 Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves
 CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
MET 107 Drawing Tool (Shapes) Notes Day 3
 Notes Day 3") MET 107 Drawing Tool (Shapes) Notes Day 3 Shapes: (Insert Tab Shapes) Example: Select on the rounded rectangle Then use the mouse to position the upper left corner and produce the size by dragging out
MET 107 Drawing Tool (Shapes) Notes Day 3 Shapes: (Insert Tab Shapes) Example: Select on the rounded rectangle Then use the mouse to position the upper left corner and produce the size by dragging out
Shape Constancy and Shape Recovery: wherein Human and Computer Vision Meet
 Shape Constancy and Shape Recovery: wherein Human and Computer Vision Meet Zygmunt Pizlo Purdue University, U.S.A. Acknowledgments: Y. Li, T. Sawada, R.M. Steinman Support: NSF, US Department of Energy,
Shape Constancy and Shape Recovery: wherein Human and Computer Vision Meet Zygmunt Pizlo Purdue University, U.S.A. Acknowledgments: Y. Li, T. Sawada, R.M. Steinman Support: NSF, US Department of Energy,
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
Perceptual Organization and Visual Design
 Perceptual Organization and Visual Design Heidi Lam January 20, 2003 Outline Perceptual Organization: Theory Gestalt Laws Transparency Summary 1 Perceptual Organization How all the bits and pieces of visual
Perceptual Organization and Visual Design Heidi Lam January 20, 2003 Outline Perceptual Organization: Theory Gestalt Laws Transparency Summary 1 Perceptual Organization How all the bits and pieces of visual
Perception Viewed as an Inverse Problem
 Perception Viewed as an Inverse Problem Fechnerian Causal Chain of Events - an evaluation Fechner s study of outer psychophysics assumes that the percept is a result of a causal chain of events: Distal
Perception Viewed as an Inverse Problem Fechnerian Causal Chain of Events - an evaluation Fechner s study of outer psychophysics assumes that the percept is a result of a causal chain of events: Distal
PARAMETRIC EQUATIONS AND POLAR COORDINATES
 10 PARAMETRIC EQUATIONS AND POLAR COORDINATES PARAMETRIC EQUATIONS & POLAR COORDINATES A coordinate system represents a point in the plane by an ordered pair of numbers called coordinates. PARAMETRIC EQUATIONS
10 PARAMETRIC EQUATIONS AND POLAR COORDINATES PARAMETRIC EQUATIONS & POLAR COORDINATES A coordinate system represents a point in the plane by an ordered pair of numbers called coordinates. PARAMETRIC EQUATIONS
Edge Grouping for Detecting Salient Boundaries with Sharp Corners
 Edge Grouping for Detecting Salient Boundaries with Sharp Corners Joachim S. Stahl Department of Computer Science Clarkson University, Potsdam, NY 13676 jstahl@clarkson.edu Abstract. The Gestalt law of
Edge Grouping for Detecting Salient Boundaries with Sharp Corners Joachim S. Stahl Department of Computer Science Clarkson University, Potsdam, NY 13676 jstahl@clarkson.edu Abstract. The Gestalt law of
CS337 INTRODUCTION TO COMPUTER GRAPHICS. Describing Shapes. Constructing Objects in Computer Graphics. Bin Sheng Representing Shape 9/20/16 1/15
 Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Solution: filter the image, then subsample F 1 F 2. subsample blur subsample. blur
 Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
On the main screen top left side enter your name and specify if you are a clinician or not.
 Document name: SOP_VAMPIRE_ANNOTATION_TOOL Title: VAMPIRE-Annotation Tool Author: Ilaria Pieretti Version: 10 10 Background: VAMPIRE (Vascular Assessment and Measurement Platform for Images of the Retina)
Document name: SOP_VAMPIRE_ANNOTATION_TOOL Title: VAMPIRE-Annotation Tool Author: Ilaria Pieretti Version: 10 10 Background: VAMPIRE (Vascular Assessment and Measurement Platform for Images of the Retina)
CS123 INTRODUCTION TO COMPUTER GRAPHICS. Describing Shapes. Constructing Objects in Computer Graphics 1/15
 Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Visual detection of symmetry of 3D shapes
 Journal of Vision (010) 10(6):4, 1 http://www.journalofvision.org/content/10/6/4 1 Visual detection of symmetry of 3D shapes Tadamasa Sawada Department of Psychological Science, Purdue University, West
Journal of Vision (010) 10(6):4, 1 http://www.journalofvision.org/content/10/6/4 1 Visual detection of symmetry of 3D shapes Tadamasa Sawada Department of Psychological Science, Purdue University, West
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
coding of various parts showing different features, the possibility of rotation or of hiding covering parts of the object's surface to gain an insight
 Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Edge Grouping Combining Boundary and Region Information
 University of South Carolina Scholar Commons Faculty Publications Computer Science and Engineering, Department of 10-1-2007 Edge Grouping Combining Boundary and Region Information Joachim S. Stahl Song
University of South Carolina Scholar Commons Faculty Publications Computer Science and Engineering, Department of 10-1-2007 Edge Grouping Combining Boundary and Region Information Joachim S. Stahl Song
MPEG-7 Visual shape descriptors
 MPEG-7 Visual shape descriptors Miroslaw Bober presented by Peter Tylka Seminar on scientific soft skills 22.3.2012 Presentation Outline Presentation Outline Introduction to problem Shape spectrum - 3D
MPEG-7 Visual shape descriptors Miroslaw Bober presented by Peter Tylka Seminar on scientific soft skills 22.3.2012 Presentation Outline Presentation Outline Introduction to problem Shape spectrum - 3D
2D Object Definition (1/3)
") 2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
Section 10.1 Polar Coordinates
 Section 10.1 Polar Coordinates Up until now, we have always graphed using the rectangular coordinate system (also called the Cartesian coordinate system). In this section we will learn about another system,
Section 10.1 Polar Coordinates Up until now, we have always graphed using the rectangular coordinate system (also called the Cartesian coordinate system). In this section we will learn about another system,
The Ray model of Light. Reflection. Class 18
 The Ray model of Light Over distances of a terrestrial scale light travels in a straight line. The path of a laser is now the best way we have of defining a straight line. The model of light which assumes
The Ray model of Light Over distances of a terrestrial scale light travels in a straight line. The path of a laser is now the best way we have of defining a straight line. The model of light which assumes
COMPRESSED DETECTION VIA MANIFOLD LEARNING. Hyun Jeong Cho, Kuang-Hung Liu, Jae Young Park. { zzon, khliu, jaeypark
 COMPRESSED DETECTION VIA MANIFOLD LEARNING Hyun Jeong Cho, Kuang-Hung Liu, Jae Young Park Email : { zzon, khliu, jaeypark } @umich.edu 1. INTRODUCTION In many imaging applications such as Computed Tomography
COMPRESSED DETECTION VIA MANIFOLD LEARNING Hyun Jeong Cho, Kuang-Hung Liu, Jae Young Park Email : { zzon, khliu, jaeypark } @umich.edu 1. INTRODUCTION In many imaging applications such as Computed Tomography
6. Applications - Text recognition in videos - Semantic video analysis
 6. Applications - Text recognition in videos - Semantic video analysis Stephan Kopf 1 Motivation Goal: Segmentation and classification of characters Only few significant features are visible in these simple
6. Applications - Text recognition in videos - Semantic video analysis Stephan Kopf 1 Motivation Goal: Segmentation and classification of characters Only few significant features are visible in these simple
Making Science Graphs and Interpreting Data
 Making Science Graphs and Interpreting Data Eye Opener: 5 mins What do you see? What do you think? Look up terms you don t know What do Graphs Tell You? A graph is a way of expressing a relationship between
Making Science Graphs and Interpreting Data Eye Opener: 5 mins What do you see? What do you think? Look up terms you don t know What do Graphs Tell You? A graph is a way of expressing a relationship between
Appendix 1: Manual for Fovea Software
 1 Appendix 1: Manual for Fovea Software Fovea is a software to calculate foveal width and depth by detecting local maxima and minima from fovea images in order to estimate foveal depth and width. This
1 Appendix 1: Manual for Fovea Software Fovea is a software to calculate foveal width and depth by detecting local maxima and minima from fovea images in order to estimate foveal depth and width. This
Template Matching Rigid Motion. Find transformation to align two images. Focus on geometric features
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Creating and editing vector maps
 Software PHOTOMOD Module PHOTOMOD VectOr Creating and editing vector maps Racurs, Moscow, 2009 PHOTOMOD CONTENTS 1. GENERAL PURPOSE OF VECTOR MAP EDITOR... 3 2. VECTOR MAP EDITOR MANAGING.... 3 3. ADDING
Software PHOTOMOD Module PHOTOMOD VectOr Creating and editing vector maps Racurs, Moscow, 2009 PHOTOMOD CONTENTS 1. GENERAL PURPOSE OF VECTOR MAP EDITOR... 3 2. VECTOR MAP EDITOR MANAGING.... 3 3. ADDING
Learning video saliency from human gaze using candidate selection
 Learning video saliency from human gaze using candidate selection Rudoy, Goldman, Shechtman, Zelnik-Manor CVPR 2013 Paper presentation by Ashish Bora Outline What is saliency? Image vs video Candidates
Learning video saliency from human gaze using candidate selection Rudoy, Goldman, Shechtman, Zelnik-Manor CVPR 2013 Paper presentation by Ashish Bora Outline What is saliency? Image vs video Candidates
Reflection and Mirrors
 Reflection and Mirrors 1 The Law of Reflection The angle of incidence equals the angle of reflection. 2 The Law of Reflection When light strikes a surface it is reflected. The light ray striking the surface
Reflection and Mirrors 1 The Law of Reflection The angle of incidence equals the angle of reflection. 2 The Law of Reflection When light strikes a surface it is reflected. The light ray striking the surface
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
Möbius Transformations in Scientific Computing. David Eppstein
 Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Salient Boundary Detection using Ratio Contour
 Salient Boundary Detection using Ratio Contour Song Wang, Toshiro Kubota Dept. Computer Science & Engineering University of South Carolina Columbia, SC 29208 {songwang kubota}@cse.sc.edu Jeffrey Mark Siskind
Salient Boundary Detection using Ratio Contour Song Wang, Toshiro Kubota Dept. Computer Science & Engineering University of South Carolina Columbia, SC 29208 {songwang kubota}@cse.sc.edu Jeffrey Mark Siskind
Reflection & Mirrors
 Reflection & Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media A ray of light is
Reflection & Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media A ray of light is
Perception of Surfaces from Line Drawings
 Perception of Surfaces from Line Drawings CHRISTOPH HOFFMANN 1, ZYGMUNT PIZLO 2, VOICU POPESCU 1, STEVE PRICE 1 1 Computer Sciences, 2 Psychological Sciences, Purdue University We test the perception of
Perception of Surfaces from Line Drawings CHRISTOPH HOFFMANN 1, ZYGMUNT PIZLO 2, VOICU POPESCU 1, STEVE PRICE 1 1 Computer Sciences, 2 Psychological Sciences, Purdue University We test the perception of
Stereoscopic transparency: a test for binocular vision s disambiguating power 1
 Vision Research 38 (1998) 2913 2932 Stereoscopic transparency: a test for binocular vision s disambiguating power 1 Sergei Gepshtein 2, Alexander Cooperman * Brain Research Center, Department of Neurobiology,
Vision Research 38 (1998) 2913 2932 Stereoscopic transparency: a test for binocular vision s disambiguating power 1 Sergei Gepshtein 2, Alexander Cooperman * Brain Research Center, Department of Neurobiology,
Polar Coordinates. Chapter 10: Parametric Equations and Polar coordinates, Section 10.3: Polar coordinates 27 / 45
 : Given any point P = (x, y) on the plane r stands for the distance from the origin (0, 0). θ stands for the angle from positive x-axis to OP. Polar coordinate: (r, θ) Chapter 10: Parametric Equations
: Given any point P = (x, y) on the plane r stands for the distance from the origin (0, 0). θ stands for the angle from positive x-axis to OP. Polar coordinate: (r, θ) Chapter 10: Parametric Equations
For each question, indicate whether the statement is true or false by circling T or F, respectively.
 True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
Calypso Construction Features. Construction Features 1
 Calypso 1 The Construction dropdown menu contains several useful construction features that can be used to compare two other features or perform special calculations. Construction features will show up
Calypso 1 The Construction dropdown menu contains several useful construction features that can be used to compare two other features or perform special calculations. Construction features will show up
For Information on SNAKEs. Active Contours (SNAKES) Improve Boundary Detection. Back to boundary detection. This is non-parametric
 Improve Boundary Detection. Back to boundary detection. This is non-parametric") Active Contours (SNAKES) Back to boundary detection This time using perceptual grouping. This is non-parametric We re not looking for a contour of a specific shape. Just a good contour. For Information
Active Contours (SNAKES) Back to boundary detection This time using perceptual grouping. This is non-parametric We re not looking for a contour of a specific shape. Just a good contour. For Information
Detection of Convexity and Concavity in Context
 Journal of Experimental Psychology: Human Perception and Performance 2008, Vol. 34, No. 4, 775 789 Copyright 2008 by the American Psychological Association 0096-1523/08/$12.00 DOI: 10.1037/0096-1523.34.4.775
Journal of Experimental Psychology: Human Perception and Performance 2008, Vol. 34, No. 4, 775 789 Copyright 2008 by the American Psychological Association 0096-1523/08/$12.00 DOI: 10.1037/0096-1523.34.4.775
SHAPE AND STRUCTURE. Shape and Structure. An explanation of Mathematical terminology
 Shape and Structure An explanation of Mathematical terminology 2005 1 POINT A dot Dots join to make lines LINE A line is 1 dimensional (length) A line is a series of points touching each other and extending
Shape and Structure An explanation of Mathematical terminology 2005 1 POINT A dot Dots join to make lines LINE A line is 1 dimensional (length) A line is a series of points touching each other and extending
Lecture Outline Chapter 26. Physics, 4 th Edition James S. Walker. Copyright 2010 Pearson Education, Inc.
 Lecture Outline Chapter 26 Physics, 4 th Edition James S. Walker Chapter 26 Geometrical Optics Units of Chapter 26 The Reflection of Light Forming Images with a Plane Mirror Spherical Mirrors Ray Tracing
Lecture Outline Chapter 26 Physics, 4 th Edition James S. Walker Chapter 26 Geometrical Optics Units of Chapter 26 The Reflection of Light Forming Images with a Plane Mirror Spherical Mirrors Ray Tracing
4 Parametrization of closed curves and surfaces
 4 Parametrization of closed curves and surfaces Parametrically deformable models give rise to the question of obtaining parametrical descriptions of given pixel or voxel based object contours or surfaces,
4 Parametrization of closed curves and surfaces Parametrically deformable models give rise to the question of obtaining parametrical descriptions of given pixel or voxel based object contours or surfaces,
Shape effects on memory for location
 Psychonomic Bulletin & Review 2007, 14 (4), 681-686 Shape effects on memory for location Douglas H. Wedell, Sylvia Fitting, and Gary L. Allen University of South Carolina, Columbia, South Carolina The
Psychonomic Bulletin & Review 2007, 14 (4), 681-686 Shape effects on memory for location Douglas H. Wedell, Sylvia Fitting, and Gary L. Allen University of South Carolina, Columbia, South Carolina The
Complex Numbers, Polar Equations, and Parametric Equations. Copyright 2017, 2013, 2009 Pearson Education, Inc.
 8 Complex Numbers, Polar Equations, and Parametric Equations Copyright 2017, 2013, 2009 Pearson Education, Inc. 1 8.5 Polar Equations and Graphs Polar Coordinate System Graphs of Polar Equations Conversion
8 Complex Numbers, Polar Equations, and Parametric Equations Copyright 2017, 2013, 2009 Pearson Education, Inc. 1 8.5 Polar Equations and Graphs Polar Coordinate System Graphs of Polar Equations Conversion
Mirrors. N.G. Schultheiss translated and adapted by K. Schadenberg
 Mirrors N.G. Schultheiss translated and adapted by K. Schadenberg 1 Introduction This module Mirrors summarizes and extents your basic knowledge about mirrors. After this module you can proceed with the
Mirrors N.G. Schultheiss translated and adapted by K. Schadenberg 1 Introduction This module Mirrors summarizes and extents your basic knowledge about mirrors. After this module you can proceed with the
LIGHT-REFLECTION AND REFRACTION. It is a form of energy which is needed to see things around us. It travels in a straight line.
 LIGHT-REFLECTION AND REFRACTION Class: 10 (Boys) Sub: PHYSICS NOTES-Reflection Light: It is a form of energy which is needed to see things around us. It travels in a straight line. Nature of Light: Light
LIGHT-REFLECTION AND REFRACTION Class: 10 (Boys) Sub: PHYSICS NOTES-Reflection Light: It is a form of energy which is needed to see things around us. It travels in a straight line. Nature of Light: Light
CSC 2521 Final Project Report. Hanieh Bastani
 CSC 2521 Final Project Report Hanieh Bastani December, 2007 NPR Renderer: Overview I implemented a 3D NPR renderer which supports contours, suggestive contours, and toon shading. For this implementation,
CSC 2521 Final Project Report Hanieh Bastani December, 2007 NPR Renderer: Overview I implemented a 3D NPR renderer which supports contours, suggestive contours, and toon shading. For this implementation,
Visual interpolation and extrapolation of contours
 Visual interpolation and extrapolation of contours Jacqueline M. Fulvio, Manish Singh and Laurence T. Maloney In Gepshtein, S., Singh, M. & Maloney, L. T. (2015), Oxford Handbook of Computational Perceptual
Visual interpolation and extrapolation of contours Jacqueline M. Fulvio, Manish Singh and Laurence T. Maloney In Gepshtein, S., Singh, M. & Maloney, L. T. (2015), Oxford Handbook of Computational Perceptual
Mathematical Morphology and Distance Transforms. Robin Strand
 Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Topographic Mapping with fmri
 Topographic Mapping with fmri Retinotopy in visual cortex Tonotopy in auditory cortex signal processing + neuroimaging = beauty! Topographic Mapping with fmri Retinotopy in visual cortex Tonotopy in auditory
Topographic Mapping with fmri Retinotopy in visual cortex Tonotopy in auditory cortex signal processing + neuroimaging = beauty! Topographic Mapping with fmri Retinotopy in visual cortex Tonotopy in auditory
Appendix 2: PREPARATION & INTERPRETATION OF GRAPHS
 Appendi 2: PREPARATION & INTERPRETATION OF GRAPHS All of you should have had some eperience in plotting graphs. Some of you may have done this in the distant past. Some may have done it only in math courses
Appendi 2: PREPARATION & INTERPRETATION OF GRAPHS All of you should have had some eperience in plotting graphs. Some of you may have done this in the distant past. Some may have done it only in math courses
Aim: How do we find the volume of a figure with a given base? Get Ready: The region R is bounded by the curves. y = x 2 + 1
 Get Ready: The region R is bounded by the curves y = x 2 + 1 y = x + 3. a. Find the area of region R. b. The region R is revolved around the horizontal line y = 1. Find the volume of the solid formed.
Get Ready: The region R is bounded by the curves y = x 2 + 1 y = x + 3. a. Find the area of region R. b. The region R is revolved around the horizontal line y = 1. Find the volume of the solid formed.
Trigonometry Review Version 0.1 (September 6, 2004)
") Trigonometry Review Version 0. (September, 00 Martin Jackson, University of Puget Sound The purpose of these notes is to provide a brief review of trigonometry for students who are taking calculus. The
Trigonometry Review Version 0. (September, 00 Martin Jackson, University of Puget Sound The purpose of these notes is to provide a brief review of trigonometry for students who are taking calculus. The
Chapter 5snow year.notebook March 15, 2018
 Chapter 5: Statistical Reasoning Section 5.1 Exploring Data Measures of central tendency (Mean, Median and Mode) attempt to describe a set of data by identifying the central position within a set of data
Chapter 5: Statistical Reasoning Section 5.1 Exploring Data Measures of central tendency (Mean, Median and Mode) attempt to describe a set of data by identifying the central position within a set of data
Collision detection for Point Clouds
 Collision detection for Point Clouds Gabriel Zachmann Bonn University zach@cs.uni-bonn.de Motivation Modern acquisition techniques (laser scanners) lead to modern object representation Efficient rendering
Collision detection for Point Clouds Gabriel Zachmann Bonn University zach@cs.uni-bonn.de Motivation Modern acquisition techniques (laser scanners) lead to modern object representation Efficient rendering
Optimal Grouping of Line Segments into Convex Sets 1
 Optimal Grouping of Line Segments into Convex Sets 1 B. Parvin and S. Viswanathan Imaging and Distributed Computing Group Information and Computing Sciences Division Lawrence Berkeley National Laboratory,
Optimal Grouping of Line Segments into Convex Sets 1 B. Parvin and S. Viswanathan Imaging and Distributed Computing Group Information and Computing Sciences Division Lawrence Berkeley National Laboratory,
Def De orma f tion orma Disney/Pixar
 Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Interface Overview. Menu Bar. Control Palette. Toolbox. Palettes. Document Window. Status Bar
 Lesson overview: This module covers basic elements of the Illustrator work area. Learn how to open and close plaettes, choose tools, and learn the funtions of each tool. Learn how to reset your workspace
Lesson overview: This module covers basic elements of the Illustrator work area. Learn how to open and close plaettes, choose tools, and learn the funtions of each tool. Learn how to reset your workspace
along the curves is usually an image of edge points that represent simple incomplete shapes. These edge points are represented as a binary image with
 Multiple Contour Finding and Perceptual Grouping using Minimal Paths Laurent D. COHEN CEREMADE, UMR 7534, Universite Paris-Dauphine 75775 Paris cedex 16, France; Email: cohen@ceremade.dauphine.fr Abstract
Multiple Contour Finding and Perceptual Grouping using Minimal Paths Laurent D. COHEN CEREMADE, UMR 7534, Universite Paris-Dauphine 75775 Paris cedex 16, France; Email: cohen@ceremade.dauphine.fr Abstract
Image Processing: Final Exam November 10, :30 10:30
 Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
Graphics and Interaction Rendering pipeline & object modelling
 433-324 Graphics and Interaction Rendering pipeline & object modelling Department of Computer Science and Software Engineering The Lecture outline Introduction to Modelling Polygonal geometry The rendering
433-324 Graphics and Interaction Rendering pipeline & object modelling Department of Computer Science and Software Engineering The Lecture outline Introduction to Modelling Polygonal geometry The rendering
A Patch Prior for Dense 3D Reconstruction in Man-Made Environments
 A Patch Prior for Dense 3D Reconstruction in Man-Made Environments Christian Häne 1, Christopher Zach 2, Bernhard Zeisl 1, Marc Pollefeys 1 1 ETH Zürich 2 MSR Cambridge October 14, 2012 A Patch Prior for
A Patch Prior for Dense 3D Reconstruction in Man-Made Environments Christian Häne 1, Christopher Zach 2, Bernhard Zeisl 1, Marc Pollefeys 1 1 ETH Zürich 2 MSR Cambridge October 14, 2012 A Patch Prior for
Investigating How and When Perceptual Organization Cues Improve Boundary Detection in Natural Images
 Investigating How and When Perceptual Organization Cues Improve Boundary Detection in Natural Images Leandro A. Loss, George Bebis, Mircea Nicolescu Computer Vision Laboratory University of Nevada, Reno
Investigating How and When Perceptual Organization Cues Improve Boundary Detection in Natural Images Leandro A. Loss, George Bebis, Mircea Nicolescu Computer Vision Laboratory University of Nevada, Reno
This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and
 This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and education use, including for instruction at the authors institution
This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and education use, including for instruction at the authors institution
BRDF measurement and color appearance simulation based on iccmax framework
 BRDF measurement and color appearance simulation based on iccmax framework Wei-Chun HUNG, Pei-Li SUN 2017/06/28 Graduate Institute of Color and Illumination Tech., Nat. Taiwan Univ. of Sci. & Tech. Page
BRDF measurement and color appearance simulation based on iccmax framework Wei-Chun HUNG, Pei-Li SUN 2017/06/28 Graduate Institute of Color and Illumination Tech., Nat. Taiwan Univ. of Sci. & Tech. Page
CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION
 60 CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION 3.1 IMPORTANCE OF OPTIC DISC Ocular fundus images provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular
60 CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION 3.1 IMPORTANCE OF OPTIC DISC Ocular fundus images provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular
Chapter 12: Quadratic and Cubic Graphs
 Chapter 12: Quadratic and Cubic Graphs Section 12.1 Quadratic Graphs x 2 + 2 a 2 + 2a - 6 r r 2 x 2 5x + 8 2y 2 + 9y + 2 All the above equations contain a squared number. They are therefore called quadratic
Chapter 12: Quadratic and Cubic Graphs Section 12.1 Quadratic Graphs x 2 + 2 a 2 + 2a - 6 r r 2 x 2 5x + 8 2y 2 + 9y + 2 All the above equations contain a squared number. They are therefore called quadratic
Research on-board LIDAR point cloud data pretreatment
 Acta Technica 62, No. 3B/2017, 1 16 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on-board LIDAR point cloud data pretreatment Peng Cang 1, Zhenglin Yu 1, Bo Yu 2, 3 Abstract. In view of the
Acta Technica 62, No. 3B/2017, 1 16 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on-board LIDAR point cloud data pretreatment Peng Cang 1, Zhenglin Yu 1, Bo Yu 2, 3 Abstract. In view of the
Physics for Scientists & Engineers 2
 Geometric Optics Physics for Scientists & Engineers 2 Spring Semester 2005 Lecture 36! The study of light divides itself into three fields geometric optics wave optics quantum optics! In the previous chapter,
Geometric Optics Physics for Scientists & Engineers 2 Spring Semester 2005 Lecture 36! The study of light divides itself into three fields geometric optics wave optics quantum optics! In the previous chapter,
Rational Numbers: Graphing: The Coordinate Plane
 Rational Numbers: Graphing: The Coordinate Plane A special kind of plane used in mathematics is the coordinate plane, sometimes called the Cartesian plane after its inventor, René Descartes. It is one
Rational Numbers: Graphing: The Coordinate Plane A special kind of plane used in mathematics is the coordinate plane, sometimes called the Cartesian plane after its inventor, René Descartes. It is one
4.G.1. Name Date. Geometry. Use the figure below to answer questions Draw an intersecting line through the line below. E H
 Name Date ssessment 1 4.G.1 questions 1-3. 5. Draw an intersecting line through the line below. E H B C D G F 6. Draw a perpendicular line through the set of lines below. 1. Name a pair of parallel lines.
Name Date ssessment 1 4.G.1 questions 1-3. 5. Draw an intersecting line through the line below. E H B C D G F 6. Draw a perpendicular line through the set of lines below. 1. Name a pair of parallel lines.
Shape Blending Using the Star-Skeleton Representation
 Shape Blending Using the Star-Skeleton Representation Michal Shapira Ari Rappoport Institute of Computer Science, The Hebrew University of Jerusalem Jerusalem 91904, Israel. arir@cs.huji.ac.il Abstract:
Shape Blending Using the Star-Skeleton Representation Michal Shapira Ari Rappoport Institute of Computer Science, The Hebrew University of Jerusalem Jerusalem 91904, Israel. arir@cs.huji.ac.il Abstract:
Scalar Visualization
 Scalar Visualization Visualizing scalar data Popular scalar visualization techniques Color mapping Contouring Height plots outline Recap of Chap 4: Visualization Pipeline 1. Data Importing 2. Data Filtering
Scalar Visualization Visualizing scalar data Popular scalar visualization techniques Color mapping Contouring Height plots outline Recap of Chap 4: Visualization Pipeline 1. Data Importing 2. Data Filtering
4.2 Description of surfaces by spherical harmonic functions
 Chapter 4. Parametrization of closed curves and surfaces Im[z] Im[z] Translation Im[z] Im[z] Rotation Scale Starting point Re[z] Re[z] Re[z] Re[z] a b c d Figure 4.: Normalization steps of Fourier coefficients;
Chapter 4. Parametrization of closed curves and surfaces Im[z] Im[z] Translation Im[z] Im[z] Rotation Scale Starting point Re[z] Re[z] Re[z] Re[z] a b c d Figure 4.: Normalization steps of Fourier coefficients;
Chapter 12: Pull Toy - Solids and Transforms
 This tutorial demonstrates using solid primitives and simple transforms. You will learn how to: Enter coordinates to place points exactly. Draw a free-form curve and polygon. Create a pipe along a curve.
This tutorial demonstrates using solid primitives and simple transforms. You will learn how to: Enter coordinates to place points exactly. Draw a free-form curve and polygon. Create a pipe along a curve.
Ellipse fitting using orthogonal hyperbolae and Stirling s oval
 Ellipse fitting using orthogonal hyperbolae and Stirling s oval Paul L. Rosin Abstract Two methods for approximating the normal distance to an ellipse using a) its orthogonal hyperbolae, and b) Stirling
Ellipse fitting using orthogonal hyperbolae and Stirling s oval Paul L. Rosin Abstract Two methods for approximating the normal distance to an ellipse using a) its orthogonal hyperbolae, and b) Stirling
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
COMP371 COMPUTER GRAPHICS
 COMP371 COMPUTER GRAPHICS LECTURE 14 RASTERIZATION 1 Lecture Overview Review of last class Line Scan conversion Polygon Scan conversion Antialiasing 2 Rasterization The raster display is a matrix of picture
COMP371 COMPUTER GRAPHICS LECTURE 14 RASTERIZATION 1 Lecture Overview Review of last class Line Scan conversion Polygon Scan conversion Antialiasing 2 Rasterization The raster display is a matrix of picture
Polar Coordinates. Chapter 10: Parametric Equations and Polar coordinates, Section 10.3: Polar coordinates 28 / 46
 Polar Coordinates Polar Coordinates: Given any point P = (x, y) on the plane r stands for the distance from the origin (0, 0). θ stands for the angle from positive x-axis to OP. Polar coordinate: (r, θ)
Polar Coordinates Polar Coordinates: Given any point P = (x, y) on the plane r stands for the distance from the origin (0, 0). θ stands for the angle from positive x-axis to OP. Polar coordinate: (r, θ)
Shape constancy from novel views
 Perception & Psychophysics 1999, 61 (7), 1299-1307 Shape constancy from novel views ZYGMUNT PIZLO and ADAM K. STEVENSON Purdue University, West Lafayette, Indiana Prior experiments on shape constancy from
Perception & Psychophysics 1999, 61 (7), 1299-1307 Shape constancy from novel views ZYGMUNT PIZLO and ADAM K. STEVENSON Purdue University, West Lafayette, Indiana Prior experiments on shape constancy from
A Sketch Interpreter System with Shading and Cross Section Lines
 Journal for Geometry and Graphics Volume 9 (2005), No. 2, 177 189. A Sketch Interpreter System with Shading and Cross Section Lines Kunio Kondo 1, Haruki Shizuka 1, Weizhong Liu 1, Koichi Matsuda 2 1 Dept.
Journal for Geometry and Graphics Volume 9 (2005), No. 2, 177 189. A Sketch Interpreter System with Shading and Cross Section Lines Kunio Kondo 1, Haruki Shizuka 1, Weizhong Liu 1, Koichi Matsuda 2 1 Dept.
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
INSTRUCTORS: A. SANPHAWAT JATUPATWARANGKUL A. NATTAPOL SUPHAWONG A. THEEPRAKORN LUNTHOMRATTANA COMPUTER AIDED DESIGN I AUTOCAD AND ILLUSTRATOR CS
 INSTRUCTORS: A. SANPHAWAT JATUPATWARANGKUL A. NATTAPOL SUPHAWONG A. THEEPRAKORN LUNTHOMRATTANA COMPUTER AIDED DESIGN I AUTOCAD AND ILLUSTRATOR CS BITMAP IMAGES VS VECTOR GRAPHICS WORKING WITH BITMAP IMAGES
INSTRUCTORS: A. SANPHAWAT JATUPATWARANGKUL A. NATTAPOL SUPHAWONG A. THEEPRAKORN LUNTHOMRATTANA COMPUTER AIDED DESIGN I AUTOCAD AND ILLUSTRATOR CS BITMAP IMAGES VS VECTOR GRAPHICS WORKING WITH BITMAP IMAGES
Grouping of Isolated Non-directional Cues with Straight Offset Polygons
 Grouping of Isolated Non-directional Cues with Straight Offset Polygons Toshiro Kubota Mathematical Sciences, Susquehanna University, Selinsgrove PA U.S.A. kubota@susqu.edu Keywords: Abstract: Dot Patterns,
Grouping of Isolated Non-directional Cues with Straight Offset Polygons Toshiro Kubota Mathematical Sciences, Susquehanna University, Selinsgrove PA U.S.A. kubota@susqu.edu Keywords: Abstract: Dot Patterns,
CS 556: Computer Vision. Lecture 18
 CS 556: Computer Vision Lecture 18 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Color 2 Perception of Color The sensation of color is caused by the brain Strongly affected by: Other nearby colors
CS 556: Computer Vision Lecture 18 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Color 2 Perception of Color The sensation of color is caused by the brain Strongly affected by: Other nearby colors
Motivations and Generalizations. Ali Torkamani
 Distribution Tracking B Active Contours, Motivations and Generalizations Ali Torkamani Outline Motivation Calculus of Variations Statistical Distance Earl works on Snakes and Active Contour Models Active
Distribution Tracking B Active Contours, Motivations and Generalizations Ali Torkamani Outline Motivation Calculus of Variations Statistical Distance Earl works on Snakes and Active Contour Models Active
Jim Lambers MAT 169 Fall Semester Lecture 33 Notes
 Jim Lambers MAT 169 Fall Semester 2009-10 Lecture 33 Notes These notes correspond to Section 9.3 in the text. Polar Coordinates Throughout this course, we have denoted a point in the plane by an ordered
Jim Lambers MAT 169 Fall Semester 2009-10 Lecture 33 Notes These notes correspond to Section 9.3 in the text. Polar Coordinates Throughout this course, we have denoted a point in the plane by an ordered
pine cone Ratio = 13:8 or 8:5
 Chapter 10: Introducing Geometry 10.1 Basic Ideas of Geometry Geometry is everywhere o Road signs o Carpentry o Architecture o Interior design o Advertising o Art o Science Understanding and appreciating
Chapter 10: Introducing Geometry 10.1 Basic Ideas of Geometry Geometry is everywhere o Road signs o Carpentry o Architecture o Interior design o Advertising o Art o Science Understanding and appreciating
Math Boot Camp: Coordinate Systems
 Math Boot Camp: Coordinate Systems You can skip this boot camp if you can answer the following question: Staying on a sphere of radius R, what is the shortest distance between the point (0, 0, R) on the
Math Boot Camp: Coordinate Systems You can skip this boot camp if you can answer the following question: Staying on a sphere of radius R, what is the shortest distance between the point (0, 0, R) on the
Chapter 26 Geometrical Optics
 Chapter 26 Geometrical Optics 1 Overview of Chapter 26 The Reflection of Light Forming Images with a Plane Mirror Spherical Mirrors Ray Tracing and the Mirror Equation The Refraction of Light Ray Tracing
Chapter 26 Geometrical Optics 1 Overview of Chapter 26 The Reflection of Light Forming Images with a Plane Mirror Spherical Mirrors Ray Tracing and the Mirror Equation The Refraction of Light Ray Tracing
Chapter 23. Geometrical Optics: Mirrors and Lenses and other Instruments
 Chapter 23 Geometrical Optics: Mirrors and Lenses and other Instruments HITT1 A small underwater pool light is 1 m below the surface of a swimming pool. What is the radius of the circle of light on the
Chapter 23 Geometrical Optics: Mirrors and Lenses and other Instruments HITT1 A small underwater pool light is 1 m below the surface of a swimming pool. What is the radius of the circle of light on the
9.1 Parametric Curves
 Math 172 Chapter 9A notes Page 1 of 20 9.1 Parametric Curves So far we have discussed equations in the form. Sometimes and are given as functions of a parameter. Example. Projectile Motion Sketch and axes,
Math 172 Chapter 9A notes Page 1 of 20 9.1 Parametric Curves So far we have discussed equations in the form. Sometimes and are given as functions of a parameter. Example. Projectile Motion Sketch and axes,
Optics II. Reflection and Mirrors
 Optics II Reflection and Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media The
Optics II Reflection and Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media The
Today s Hall of Fame and Shame is a comparison of two generations of Google Advanced Search. This is the old interface.
 1 Today s Hall of Fame and Shame is a comparison of two generations of Google Advanced Search. This is the old interface. 2 And this is the new interface. (If you can t read the image, go to http://www.google.com/advanced_search.)
1 Today s Hall of Fame and Shame is a comparison of two generations of Google Advanced Search. This is the old interface. 2 And this is the new interface. (If you can t read the image, go to http://www.google.com/advanced_search.)
Subset Warping: Rubber Sheeting with Cuts
 Subset Warping: Rubber Sheeting with Cuts Pierre Landau and Eric Schwartz February 14, 1994 Correspondence should be sent to: Eric Schwartz Department of Cognitive and Neural Systems Boston University
Subset Warping: Rubber Sheeting with Cuts Pierre Landau and Eric Schwartz February 14, 1994 Correspondence should be sent to: Eric Schwartz Department of Cognitive and Neural Systems Boston University
SUBDIVISION ALGORITHMS FOR MOTION DESIGN BASED ON HOMOLOGOUS POINTS
 SUBDIVISION ALGORITHMS FOR MOTION DESIGN BASED ON HOMOLOGOUS POINTS M. Hofer and H. Pottmann Institute of Geometry Vienna University of Technology, Vienna, Austria hofer@geometrie.tuwien.ac.at, pottmann@geometrie.tuwien.ac.at
SUBDIVISION ALGORITHMS FOR MOTION DESIGN BASED ON HOMOLOGOUS POINTS M. Hofer and H. Pottmann Institute of Geometry Vienna University of Technology, Vienna, Austria hofer@geometrie.tuwien.ac.at, pottmann@geometrie.tuwien.ac.at
Previously... contour or image rendering in 2D
 Volume Rendering Visualisation Lecture 10 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Volume Rendering 1 Previously... contour or image rendering in 2D 2D Contour line
Volume Rendering Visualisation Lecture 10 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Volume Rendering 1 Previously... contour or image rendering in 2D 2D Contour line
Multi-projector-type immersive light field display
 Multi-projector-type immersive light field display Qing Zhong ( é) 1, Beishi Chen (í ì) 1, Haifeng Li (Ó ô) 1, Xu Liu ( Ê) 1, Jun Xia ( ) 2, Baoping Wang ( ) 2, and Haisong Xu (Å Ø) 1 1 State Key Laboratory
Multi-projector-type immersive light field display Qing Zhong ( é) 1, Beishi Chen (í ì) 1, Haifeng Li (Ó ô) 1, Xu Liu ( Ê) 1, Jun Xia ( ) 2, Baoping Wang ( ) 2, and Haisong Xu (Å Ø) 1 1 State Key Laboratory