Deep Learning in Image and Face Intrinsics
|
|
|
- Georgia Garrett
- 5 years ago
- Views:
Transcription

1 Deep Learning in Image and Face Intrinsics Theo Gevers Professor in Computer Vision: University of Amsterdam Co-founder: Sightcorp 3DUniversum Scanm WIC, Eindhoven, February 24th, 2018
2 Amsterdam A.I. - Computer Vision Group: from the lab to the real world 1. Image Intrinsics 2. Face Intrinsics 3. 3D Reconstruction Intrinsics
3 Intrinsic images: Old School Approach
4 Reflection Model C m b n, s e f d m n, s, v C s e c f C d e n s v f C c surface albedo illumination object surface normal illumination direction viewer s direction sensor sensitivity specular scene & viewpoint invariant scene dependent object shape variant scene dependent viewpoint variant camera dependent surface dependent
5 For giving the red, green and blue sensor response under white light. Consider normalized color: Then: Also holds for g and b. In the sequel: Consider the body reflection term: rgb Photometric Invariance: Proof d f, em C C b WB s n B G R B b B G R G g B G R R r,, d f d f d f, em d f, em r B G R b R b n s n s WB WB WB WB B G R C,, d f k C C


6 Colour Invariance / rgb space Original RGB image 3D plot of RGB image rgb image 3D plot of rgb image
7 Colour Invariance - Summary shadows shading highlights ill. intensity ill. Colour I R,G,B r,g,b c1,c2,c Hue l1,l2,l m1m2m no invariance + invariance

8 Summary: Intrinsic Images Old School Reflection models help to understand the image formation process. Color invariance at the pixel. White light source or successful color constancy. Be aware of instabilities d f c e, m d f e, m C C s C b, v n s n s
9 Intrinsic images: New School Approach AT THE PIXEL

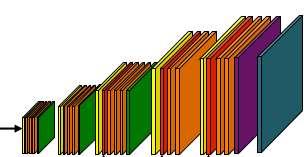

10 ConvNet: Encoder-Decoder Style Model Decoders Encoder S I R
11 Intrinsic images: New School End-to-end solution but no insight in why and how it works. Still outperformed by old school methods in terms of accuracy. Simple loss functions based on reconstruction loss ignoring the image formation model.
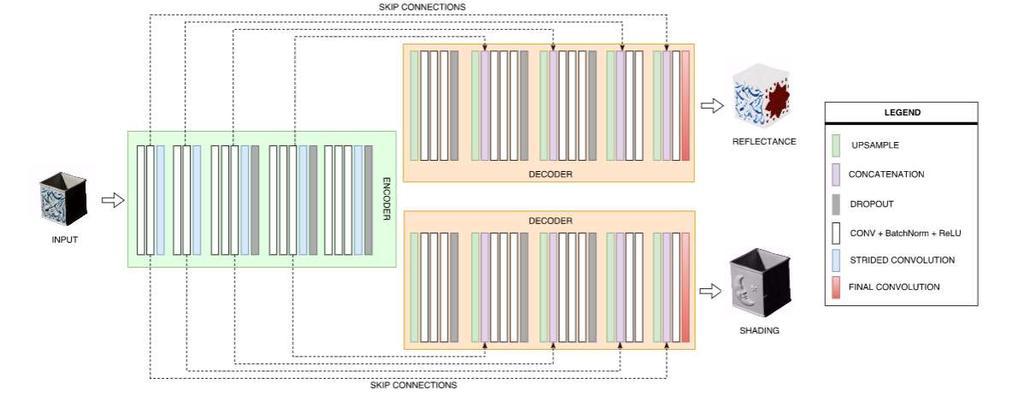

12 ConvNet: Encoder-Decoder Style
13 ShapeNet Rendered Dataset
14 Qualitative Results: MIT Dataset
15 IntrinsicNet: Conclusion Advantage + Integrated image formation model + Can capture most of the color information & shading + Colors are more vivid and eliminates most of the color artifacts + Fast and more memory efficient To be improved - Edge sharpness Next Retinex revisited
16 Intrinsic images: Old School Approach RETINEX DERIVATIVES
17 C C f And narrow-band filters: Then: Assuming body reflection Therefore, we have: Von Kries Model B G R C d f e m C C b,, for, s n B G R C e, m C C C b,, for n s R R b e, m R n s B G b e, m G n s B B b e, m B n s
18 Solving the Inverse Problem I Image e ˆ d 2 Laplacian I 2 eˆ 2 t Thresholding T d 2 Lightness l x, y Find lightness lx,y from tx,y: Poisson s Equation x l t 2 lx, y tx, y 2 y We have to find gx,y which satisfies x, y tu, vgx u y v l, x, y tx, y gx y l, dudv

19 Intrinsic Images Original Re-integrated Colour Channels Edge Maps of Channels Shadow Edges Removed
20 Intrinsic images: New School Approach Retinex-inspired ConvNets

21 RetiNet: Retinex-Inspired ConvNet RGB Differentiation R RGB Integration x, y gx y t, RGB d 2 eˆ 2 S RGB t x, y gx, y d R S

22 ShapeNet Rendered Dataset
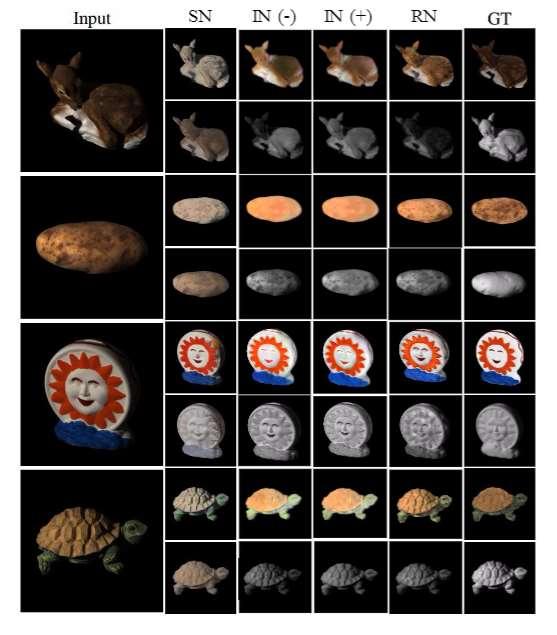
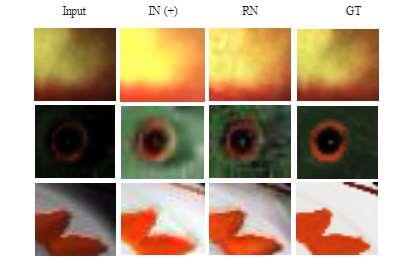
23 Qualitative Results: MIT Dataset
24 Summary Intrinsic image decomposition End-to-end solution. Full testing on intrinsic image decomposition using synthetic and real data. Full model including light source and highlights. Raw data preprocessing and augmentation.
25 Amsterdam A.I. - Computer Vision Group: from the lab to the real world 1. Image Intrinsics 2. Face Intrinsics 3. 3D Reconstruction Intrinsics

26 Basic Emotions

27 Face Analysis by Deep Learning Frame Happy




28 Sightcorp

29 FaceWarehouse: a 3D Facial Expression Database for Visual Computing Chen Cao Yanlin Weng Shun Zhou Yiying Tong Kun Zhou State Key Lab of CAD&CG, Zhejiang University Michigan State University


30 Face Analysis: The Face Model
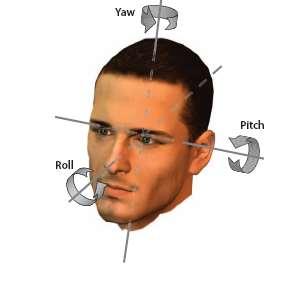
31 Face Analysis: The Camera Model

32 Face Analysis



33 Co nv 16 Co nv 32 Co nv 64 Co nv 128 Co nv 256 Co nv 256 DeCo nv 256 DeConv 256 DeConv 128 DeConv 64 DeConv 32 DeConv 16 DeCo nv 256 DeConv 256 DeConv 128 DeConv 64 DeConv 32 DeConv 16 DeCo nv 256 DeConv 256 DeConv 128 DeConv 64 DeConv 32 DeConv 16 Decoder- Shading Decoder -Specular Decoder- Albedo Encoder CNN Model: Supervised
34 Illumination Changes IMAGE ALBEDO SHADING SPECULARITY
35 Illumination, Geometry, Albedo Changes IMAGE ALBEDO SHADING SPECULARITY


36 CNN Model: Multi-Task Unsupervised Encoder Decoder rendering



37 Consumer Applications


38 Question: Is your presidency fake?

39 A.I. Face Technology Powered by:
40 Amsterdam A.I. - Computer Vision Group: from the lab to the real world 1. Image Intrinsics 2. Face Intrinsics 3. 3D Reconstruction Intrinsics



41 The True Depth camera of the iphone X: Face ID Apple s new TrueDepth camera for the iphone X sure works by using a projector to cast 30,000 dots on your face, which it then reads with an infrared camera like the Microsoft Kinect.



42 Consumer Applications: AR and VR Hololens Lenovo phab 2 pro

43 Retail & Fashion: 3D scans allow proper sizing for online shopping no more wasting time and product returns! Scan Faces and Bodies using Mobile Devices Virtual fitting, recommendation and tailoring 3DU has developed deep learning based automatic recognition algorithms which automatically detects 50K facial points eyes, temples, nose bridge, pupils, mouth corners etc. and body parts arms, waist, shoulders, legs etc..



44 Real Estate & Home Deco : Digital visits and try furniture at finger tips - refurnish your house from your couch Scan Rooms - Houses Virtual Tours, Measurements and Refurnishing


45 Scanm B.V.: Real Estate: Low-Cost Solution! Scan Rooms - Houses Equipment 3D Scanning for Everyone Lenovo + Rotator
46 Deep Learning in Computer Vision Object classification, detection and segmentation Optical flow Color constancy Intrinsic image decomposition 3D and slam Human behavior analysis Etc
Arnold W.M Smeulders Theo Gevers. University of Amsterdam smeulders}
 Arnold W.M Smeulders Theo evers University of Amsterdam email: smeulders@wins.uva.nl http://carol.wins.uva.nl/~{gevers smeulders} 0 Prolem statement Query matching Query 0 Prolem statement Query classes
Arnold W.M Smeulders Theo evers University of Amsterdam email: smeulders@wins.uva.nl http://carol.wins.uva.nl/~{gevers smeulders} 0 Prolem statement Query matching Query 0 Prolem statement Query classes
Supplementary Material: Specular Highlight Removal in Facial Images
 Supplementary Material: Specular Highlight Removal in Facial Images Chen Li 1 Stephen Lin 2 Kun Zhou 1 Katsushi Ikeuchi 2 1 State Key Lab of CAD&CG, Zhejiang University 2 Microsoft Research 1. Computation
Supplementary Material: Specular Highlight Removal in Facial Images Chen Li 1 Stephen Lin 2 Kun Zhou 1 Katsushi Ikeuchi 2 1 State Key Lab of CAD&CG, Zhejiang University 2 Microsoft Research 1. Computation
Introduction to Computer Vision. Week 8, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
HOW USEFUL ARE COLOUR INVARIANTS FOR IMAGE RETRIEVAL?
 HOW USEFUL ARE COLOUR INVARIANTS FOR IMAGE RETRIEVAL? Gerald Schaefer School of Computing and Technology Nottingham Trent University Nottingham, U.K. Gerald.Schaefer@ntu.ac.uk Abstract Keywords: The images
HOW USEFUL ARE COLOUR INVARIANTS FOR IMAGE RETRIEVAL? Gerald Schaefer School of Computing and Technology Nottingham Trent University Nottingham, U.K. Gerald.Schaefer@ntu.ac.uk Abstract Keywords: The images
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Color and Shading. Color. Shapiro and Stockman, Chapter 6. Color and Machine Vision. Color and Perception
 Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Radiance. Pixels measure radiance. This pixel Measures radiance along this ray
 Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Chapter 7. Conclusions and Future Work
 Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Illumination and Shading
 Illumination and Shading Light sources emit intensity: assigns intensity to each wavelength of light Humans perceive as a colour - navy blue, light green, etc. Exeriments show that there are distinct I
Illumination and Shading Light sources emit intensity: assigns intensity to each wavelength of light Humans perceive as a colour - navy blue, light green, etc. Exeriments show that there are distinct I
Color Constancy from Hyper-Spectral Data
 Color Constancy from Hyper-Spectral Data Th. Gevers, H. M. G. Stokman, J. van de Weijer Faculty of Science, University of Amsterdam, The Netherlands fgevers, stokman, joostwg@wins.uva.nl Abstract This
Color Constancy from Hyper-Spectral Data Th. Gevers, H. M. G. Stokman, J. van de Weijer Faculty of Science, University of Amsterdam, The Netherlands fgevers, stokman, joostwg@wins.uva.nl Abstract This
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
Light, Color, and Surface Reflectance. Shida Beigpour
 Light, Color, and Surface Reflectance Shida Beigpour Overview Introduction Multi-illuminant Intrinsic Image Estimation Multi-illuminant Scene Datasets Multi-illuminant Color Constancy Conclusions 2 Introduction
Light, Color, and Surface Reflectance Shida Beigpour Overview Introduction Multi-illuminant Intrinsic Image Estimation Multi-illuminant Scene Datasets Multi-illuminant Color Constancy Conclusions 2 Introduction
Deep Learning for Virtual Shopping. Dr. Jürgen Sturm Group Leader RGB-D
 Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
Computational Imaging for Self-Driving Vehicles
 CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
Physics-based Vision: an Introduction
 Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Digital Vision Face recognition
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 27 May 2007 Digital Vision Face recognition 1 Faces Faces are integral to human interaction Manual facial recognition is already used in everyday authentication
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 27 May 2007 Digital Vision Face recognition 1 Faces Faces are integral to human interaction Manual facial recognition is already used in everyday authentication
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Model-based Enhancement of Lighting Conditions in Image Sequences
 Model-based Enhancement of Lighting Conditions in Image Sequences Peter Eisert and Bernd Girod Information Systems Laboratory Stanford University {eisert,bgirod}@stanford.edu http://www.stanford.edu/ eisert
Model-based Enhancement of Lighting Conditions in Image Sequences Peter Eisert and Bernd Girod Information Systems Laboratory Stanford University {eisert,bgirod}@stanford.edu http://www.stanford.edu/ eisert
Lecture 24: More on Reflectance CAP 5415
 Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
Volume Illumination. Visualisation Lecture 11. Taku Komura. Institute for Perception, Action & Behaviour School of Informatics
 Volume Illumination Visualisation Lecture 11 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Volume Illumination Visualisation Lecture 11 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Lecture 15: Shading-I. CITS3003 Graphics & Animation
 Lecture 15: Shading-I CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 Objectives Learn that with appropriate shading so objects appear as threedimensional
Lecture 15: Shading-I CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 Objectives Learn that with appropriate shading so objects appear as threedimensional
Color Space Invariance for Various Edge Types in Simple Images. Geoffrey Hollinger and Dr. Bruce Maxwell Swarthmore College Summer 2003
 Color Space Invariance for Various Edge Types in Simple Images Geoffrey Hollinger and Dr. Bruce Maxwell Swarthmore College Summer 2003 Abstract This paper describes a study done to determine the color
Color Space Invariance for Various Edge Types in Simple Images Geoffrey Hollinger and Dr. Bruce Maxwell Swarthmore College Summer 2003 Abstract This paper describes a study done to determine the color
Face Recognition Markus Storer, 2007
 Face Recognition Markus Storer, 2007 Agenda Face recognition by humans 3D morphable models pose and illumination model creation model fitting results Face recognition vendor test 2006 Face Recognition
Face Recognition Markus Storer, 2007 Agenda Face recognition by humans 3D morphable models pose and illumination model creation model fitting results Face recognition vendor test 2006 Face Recognition
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Shape Segmentation with Projective Convolutional Networks
 3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
Advanced Vision Practical
 Advanced Vision Practical Bob Fisher School of Informatics February 2018 Abstract This describes the Advanced Vision assessed practical. The main goal is to reconstruct a box from a set of 3D point clouds
Advanced Vision Practical Bob Fisher School of Informatics February 2018 Abstract This describes the Advanced Vision assessed practical. The main goal is to reconstruct a box from a set of 3D point clouds
Photo-realistic Renderings for Machines Seong-heum Kim
 Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Specular Reflection Separation using Dark Channel Prior
 2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
CONTENTS. High-Accuracy Stereo Depth Maps Using Structured Light. Yeojin Yoon
 [Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
[Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
Why study Computer Vision?
 Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
MoFA: Model-based Deep Convolutional Face Autoencoder for Unsupervised Monocular Reconstruction
 MoFA: Model-based Deep Convolutional Face Autoencoder for Unsupervised Monocular Reconstruction Ayush Tewari Michael Zollhofer Hyeongwoo Kim Pablo Garrido Florian Bernard Patrick Perez Christian Theobalt
MoFA: Model-based Deep Convolutional Face Autoencoder for Unsupervised Monocular Reconstruction Ayush Tewari Michael Zollhofer Hyeongwoo Kim Pablo Garrido Florian Bernard Patrick Perez Christian Theobalt
5/14/2018. Experiences with AR and AI in development projects. Agenda. By: Sune Wolff, CTO & Partner at Unity Studios.
 Experiences with AR and AI in development projects By: Sune Wolff, CTO & Partner at Unity Studios Agenda 1 Introduction 2 3 AR and AI: Mutually Beneficial Technologies 4 Presentation of Cases and Experiences
Experiences with AR and AI in development projects By: Sune Wolff, CTO & Partner at Unity Studios Agenda 1 Introduction 2 3 AR and AI: Mutually Beneficial Technologies 4 Presentation of Cases and Experiences
Starting this chapter
 Computer Vision 5. Source, Shadow, Shading Department of Computer Engineering Jin-Ho Choi 05, April, 2012. 1/40 Starting this chapter The basic radiometric properties of various light sources Develop models
Computer Vision 5. Source, Shadow, Shading Department of Computer Engineering Jin-Ho Choi 05, April, 2012. 1/40 Starting this chapter The basic radiometric properties of various light sources Develop models
Light source estimation using feature points from specular highlights and cast shadows
 Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Using a Raster Display Device for Photometric Stereo
 DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
arxiv: v2 [cs.cv] 3 Apr 2018
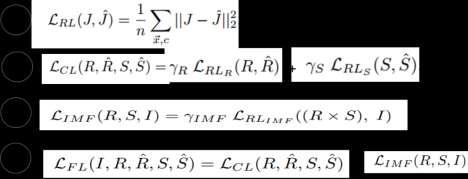
![arxiv: v2 [cs.cv] 3 Apr 2018](/thumbs/77/76627270.jpg "arxiv: v2 [cs.cv] 3 Apr 2018") CNN based Learning using Reflection and Retinex Models for Intrinsic Image Decomposition arxiv:1712.01056v2 [cs.cv] 3 Apr 2018 Abstract Most of the traditional work on intrinsic image decomposition rely
CNN based Learning using Reflection and Retinex Models for Intrinsic Image Decomposition arxiv:1712.01056v2 [cs.cv] 3 Apr 2018 Abstract Most of the traditional work on intrinsic image decomposition rely
Augmented Reality. Sung-eui Yoon
 Augmented Reality Sung-eui Yoon 1 Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing recent papers 2 Expectations Mid-term project presentation
Augmented Reality Sung-eui Yoon 1 Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing recent papers 2 Expectations Mid-term project presentation
Game Programming. Bing-Yu Chen National Taiwan University
 Game Programming Bing-Yu Chen National Taiwan University What is Computer Graphics? Definition the pictorial synthesis of real or imaginary objects from their computer-based models descriptions OUTPUT
Game Programming Bing-Yu Chen National Taiwan University What is Computer Graphics? Definition the pictorial synthesis of real or imaginary objects from their computer-based models descriptions OUTPUT
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
A Novel Algorithm for Color Image matching using Wavelet-SIFT
 International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Multimedia Technology CHAPTER 4. Video and Animation
 CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
DECOMPOSING and editing the illumination of a photograph
 IEEE TRANSACTIONS ON IMAGE PROCESSING, 2017 1 Illumination Decomposition for Photograph with Multiple Light Sources Ling Zhang, Qingan Yan, Zheng Liu, Hua Zou, and Chunxia Xiao, Member, IEEE Abstract Illumination
IEEE TRANSACTIONS ON IMAGE PROCESSING, 2017 1 Illumination Decomposition for Photograph with Multiple Light Sources Ling Zhang, Qingan Yan, Zheng Liu, Hua Zou, and Chunxia Xiao, Member, IEEE Abstract Illumination
Non-line-of-sight imaging
 Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 25 Course announcements Homework 6 will be posted tonight. - Will
Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 25 Course announcements Homework 6 will be posted tonight. - Will
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
We want to put a CG object in this room
 The Problem Temporally varying lighting What if we rearrange the furniture frequently? Mirror surfaces Diffuse surfaces We want to put a CG object in this room Are we allowed to put light probes on the
The Problem Temporally varying lighting What if we rearrange the furniture frequently? Mirror surfaces Diffuse surfaces We want to put a CG object in this room Are we allowed to put light probes on the
Image Processing Pipeline for Facial Expression Recognition under Variable Lighting
 Image Processing Pipeline for Facial Expression Recognition under Variable Lighting Ralph Ma, Amr Mohamed ralphma@stanford.edu, amr1@stanford.edu Abstract Much research has been done in the field of automated
Image Processing Pipeline for Facial Expression Recognition under Variable Lighting Ralph Ma, Amr Mohamed ralphma@stanford.edu, amr1@stanford.edu Abstract Much research has been done in the field of automated
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
General Principles of 3D Image Analysis
 General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
How do we draw a picture?
 1 How do we draw a picture? Define geometry. Now what? We can draw the edges of the faces. Wireframe. We can only draw the edges of faces that are visible. We can fill in the faces. Giving each object
1 How do we draw a picture? Define geometry. Now what? We can draw the edges of the faces. Wireframe. We can only draw the edges of faces that are visible. We can fill in the faces. Giving each object
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Computer Graphics. Bing-Yu Chen National Taiwan University The University of Tokyo
 Computer Graphics Bing-Yu Chen National Taiwan University The University of Tokyo Introduction The Graphics Process Color Models Triangle Meshes The Rendering Pipeline 1 What is Computer Graphics? modeling
Computer Graphics Bing-Yu Chen National Taiwan University The University of Tokyo Introduction The Graphics Process Color Models Triangle Meshes The Rendering Pipeline 1 What is Computer Graphics? modeling
Volume Illumination & Vector Field Visualisation
 Volume Illumination & Vector Field Visualisation Visualisation Lecture 11 Institute for Perception, Action & Behaviour School of Informatics Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Volume Illumination & Vector Field Visualisation Visualisation Lecture 11 Institute for Perception, Action & Behaviour School of Informatics Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
DeepSketch2Face: A Deep Learning Based Sketching System for 3D Face and Caricature Modeling. Part I: User Studies on the Interface
 DeepSketch2Face: A Deep Learning Based Sketching System for 3D Face and Caricature Modeling (Supplemental Materials) Xiaoguang Han, Chang Gao, Yizhou Yu The University of Hong Kong Stage I: User experience
DeepSketch2Face: A Deep Learning Based Sketching System for 3D Face and Caricature Modeling (Supplemental Materials) Xiaoguang Han, Chang Gao, Yizhou Yu The University of Hong Kong Stage I: User experience
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning
 ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein. Lecture 23: Photometric Stereo
 CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
Conversion of 2D Image into 3D and Face Recognition Based Attendance System
 Conversion of 2D Image into 3D and Face Recognition Based Attendance System Warsha Kandlikar, Toradmal Savita Laxman, Deshmukh Sonali Jagannath Scientist C, Electronics Design and Technology, NIELIT Aurangabad,
Conversion of 2D Image into 3D and Face Recognition Based Attendance System Warsha Kandlikar, Toradmal Savita Laxman, Deshmukh Sonali Jagannath Scientist C, Electronics Design and Technology, NIELIT Aurangabad,
Computational Foundations of Cognitive Science
 Computational Foundations of Cognitive Science Lecture 16: Models of Object Recognition Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk February 23, 2010 Frank Keller Computational
Computational Foundations of Cognitive Science Lecture 16: Models of Object Recognition Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk February 23, 2010 Frank Keller Computational
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model
 Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
Removing Shadows from Images
 Removing Shadows from Images Zeinab Sadeghipour Kermani School of Computing Science Simon Fraser University Burnaby, BC, V5A 1S6 Mark S. Drew School of Computing Science Simon Fraser University Burnaby,
Removing Shadows from Images Zeinab Sadeghipour Kermani School of Computing Science Simon Fraser University Burnaby, BC, V5A 1S6 Mark S. Drew School of Computing Science Simon Fraser University Burnaby,
Relighting for an Arbitrary Shape Object Under Unknown Illumination Environment
 Relighting for an Arbitrary Shape Object Under Unknown Illumination Environment Yohei Ogura (B) and Hideo Saito Keio University, 3-14-1 Hiyoshi, Kohoku, Yokohama, Kanagawa 223-8522, Japan {y.ogura,saito}@hvrl.ics.keio.ac.jp
Relighting for an Arbitrary Shape Object Under Unknown Illumination Environment Yohei Ogura (B) and Hideo Saito Keio University, 3-14-1 Hiyoshi, Kohoku, Yokohama, Kanagawa 223-8522, Japan {y.ogura,saito}@hvrl.ics.keio.ac.jp
Colour Reading: Chapter 6. Black body radiators
 Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
An ICA based Approach for Complex Color Scene Text Binarization
 An ICA based Approach for Complex Color Scene Text Binarization Siddharth Kherada IIIT-Hyderabad, India siddharth.kherada@research.iiit.ac.in Anoop M. Namboodiri IIIT-Hyderabad, India anoop@iiit.ac.in
An ICA based Approach for Complex Color Scene Text Binarization Siddharth Kherada IIIT-Hyderabad, India siddharth.kherada@research.iiit.ac.in Anoop M. Namboodiri IIIT-Hyderabad, India anoop@iiit.ac.in
Assignment #2. (Due date: 11/6/2012)
") Computer Vision I CSE 252a, Fall 2012 David Kriegman Assignment #2 (Due date: 11/6/2012) Name: Student ID: Email: Problem 1 [1 pts] Calculate the number of steradians contained in a spherical wedge with
Computer Vision I CSE 252a, Fall 2012 David Kriegman Assignment #2 (Due date: 11/6/2012) Name: Student ID: Email: Problem 1 [1 pts] Calculate the number of steradians contained in a spherical wedge with
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
High-Fidelity Facial and Speech Animation for VR HMDs
 High-Fidelity Facial and Speech Animation for VR HMDs Institute of Computer Graphics and Algorithms Vienna University of Technology Forecast facial recognition with Head-Mounted Display (HMD) two small
High-Fidelity Facial and Speech Animation for VR HMDs Institute of Computer Graphics and Algorithms Vienna University of Technology Forecast facial recognition with Head-Mounted Display (HMD) two small
Robot vision review. Martin Jagersand
 Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Computer Graphics and Visualization. What is computer graphics?
 CSCI 120 Computer Graphics and Visualization Shiaofen Fang Department of Computer and Information Science Indiana University Purdue University Indianapolis What is computer graphics? Computer graphics
CSCI 120 Computer Graphics and Visualization Shiaofen Fang Department of Computer and Information Science Indiana University Purdue University Indianapolis What is computer graphics? Computer graphics
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen?
 Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
VISOR vision sensors and the Eyesight vision systems
 VISOR vision sensors and the Eyesight vision systems Image processing made simple! VISOR Object Sensor VISOR Color VISOR Solar Sensor Eyesight Vision Systems from Page 112 from Page 62 from Page 80 from
VISOR vision sensors and the Eyesight vision systems Image processing made simple! VISOR Object Sensor VISOR Color VISOR Solar Sensor Eyesight Vision Systems from Page 112 from Page 62 from Page 80 from
Lighting and Shading
 Lighting and Shading Today: Local Illumination Solving the rendering equation is too expensive First do local illumination Then hack in reflections and shadows Local Shading: Notation light intensity in,
Lighting and Shading Today: Local Illumination Solving the rendering equation is too expensive First do local illumination Then hack in reflections and shadows Local Shading: Notation light intensity in,
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Computational Photography and Video: Intrinsic Images. Prof. Marc Pollefeys Dr. Gabriel Brostow
 Computational Photography and Video: Intrinsic Images Prof. Marc Pollefeys Dr. Gabriel Brostow Last Week Schedule Computational Photography and Video Exercises 18 Feb Introduction to Computational Photography
Computational Photography and Video: Intrinsic Images Prof. Marc Pollefeys Dr. Gabriel Brostow Last Week Schedule Computational Photography and Video Exercises 18 Feb Introduction to Computational Photography
Computer Graphics (CS 4731) Lecture 16: Lighting, Shading and Materials (Part 1)
 Lecture 16: Lighting, Shading and Materials (Part 1)") Computer Graphics (CS 4731) Lecture 16: Lighting, Shading and Materials (Part 1) Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Why do we need Lighting & shading? Sphere
Computer Graphics (CS 4731) Lecture 16: Lighting, Shading and Materials (Part 1) Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Why do we need Lighting & shading? Sphere
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
A NEW ILLUMINATION INVARIANT FEATURE BASED ON FREAK DESCRIPTOR IN RGB COLOR SPACE
 A NEW ILLUMINATION INVARIANT FEATURE BASED ON FREAK DESCRIPTOR IN RGB COLOR SPACE 1 SIOK YEE TAN, 2 HASLINA ARSHAD, 3 AZIZI ABDULLAH 1 Research Scholar, Faculty of Information Science and Technology, Universiti
A NEW ILLUMINATION INVARIANT FEATURE BASED ON FREAK DESCRIPTOR IN RGB COLOR SPACE 1 SIOK YEE TAN, 2 HASLINA ARSHAD, 3 AZIZI ABDULLAH 1 Research Scholar, Faculty of Information Science and Technology, Universiti
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
Deep Learning: Image Registration. Steven Chen and Ty Nguyen
 Deep Learning: Image Registration Steven Chen and Ty Nguyen Lecture Outline 1. Brief Introduction to Deep Learning 2. Case Study 1: Unsupervised Deep Homography 3. Case Study 2: Deep LucasKanade What is
Deep Learning: Image Registration Steven Chen and Ty Nguyen Lecture Outline 1. Brief Introduction to Deep Learning 2. Case Study 1: Unsupervised Deep Homography 3. Case Study 2: Deep LucasKanade What is
Waleed Pervaiz CSE 352
 Waleed Pervaiz CSE 352 Computer Vision is the technology that enables machines to see and obtain information from digital images. It is seen as an integral part of AI in fields such as pattern recognition
Waleed Pervaiz CSE 352 Computer Vision is the technology that enables machines to see and obtain information from digital images. It is seen as an integral part of AI in fields such as pattern recognition
Illumination and Shading
 Illumination and Shading Illumination and Shading z Illumination Models y Ambient y Diffuse y Attenuation y Specular Reflection z Interpolated Shading Models y Flat, Gouraud, Phong y Problems CS4451: Fall
Illumination and Shading Illumination and Shading z Illumination Models y Ambient y Diffuse y Attenuation y Specular Reflection z Interpolated Shading Models y Flat, Gouraud, Phong y Problems CS4451: Fall
Multi-sensor Gaze-tracking
 Multi-sensor Gaze-tracking Joe Rice March 2017 Abstract In this paper, we propose a method using multiple gaze-tracking-capable sensors along with fuzzy data-fusion techniques to improve gaze-estimation.
Multi-sensor Gaze-tracking Joe Rice March 2017 Abstract In this paper, we propose a method using multiple gaze-tracking-capable sensors along with fuzzy data-fusion techniques to improve gaze-estimation.