Fast Border Ownership Assignment with Bio-Inspired Features
|
|
|
- Shavonne Thomas
- 5 years ago
- Views:
Transcription
1 Fast Border Ownership Assignment with Bio-Inspired Features Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos Computer Vision Lab and UMIACS University of Maryland College Park

2 What is Border Ownership? Background Foreground Foreground Background

3 Motivations: Psychological & Biological V2 cell that prefers bright Figure on the left Selective nature of border ownership neurons (V2 & V4): Zhou et al., J. Neuroscience 2000 Fast response time, <75ms from stimulus onset. Figure-ground organization and attention are closely related Sugihara et al., J. Neurophysiology 2011 Craft et al, J. Neurophysiology 2007




4 Application: Figure-Ground Segmentation without BO With BO


5 Shape perception and object recognition Rubin, 1915 Bregman, 1981





6 Related Work BG FG Border-ownership assignment to Edges using multiple cues + CRF Ren et al., ECCV 2006 Leichter & Lindenbaum, ICCV 2009 Hill Boat Object proposals Cheng et al. CVPR 2014 Yao et al., CVPR 2012 Gupta et al., CVPR 2013 Depth + Normals from 2D Saxena et al., PAMI 2009 E NIPS A X

")

7 Approach Overview 1. Extract patch-based features sensitive to ownership 2. Train a Structured Random Forest (SRF) that saves ownership structure at leaf nodes 3. Fast inference using SRF by averaging responses over all decision trees


8 Feature Extraction Three different features: 1. Histogram of Gradients (HoG) 2. Spectral features of grayscale intensity 3. Gestalt-like grouping features HoG orientations encodes local shape: convexity and concavity. Magnitude localizes good boundary locations. Palmer, Vision Science 1999 Orientation (4 directions) + Magnitude


9 Feature Extraction: Local Ownership Cues Extremal edges or image folds are characteristic changes in intensity along boundaries. Huggins & Zucker, ICCV 2001 Psychophysical experiments have shown them to be one of the strongest cues for ownership. Ghose & Palmer, J. Vision 2010









10 Feature Extraction: Local Ownership Cues c1 c2 c3 c4 Annotations c5 c6 c7 c8 L CVPR PC PCA 5 10 c1 PC2 displays grayscale variations indicative of extremal edges. Ramenahalli CISS 15

 contextual cues.")



11 Feature Extraction: Global Ownership Cues Border ownership is also determined by longer range (global) contextual cues. Craft et al., J. Neurophysiology 2007 Implementation through visual operators G patterns: A: Gratings. B. Responses of a V4 cell Cells tuned to these patterns have been observed area V4 of macaques : Gallant et al., Science 1993


12 The Image Torque: Global Closure Torque in Physics Torque r F Torque in Images Torque r F Distance (radius) r image plane 0 r q F Force F F q edge point force along the tangent of the edge










13 The Image Torque: Global Closure Torque values for different patch sizes Torque value map -0.6 size Key Properties: 1. Largest response for closed contours at scale of patch. 2. Useful for attention and proto-segmentation. Input Patch size Nishigaki et al., CVPR 2012


.")

14 Feature Extraction: Global Ownership Cues Rewriting the image torque as a scalar product of the edges (tangent vectors) E(x,y) and a circular gradient field g(x,y). E(x,y) g (x,y) y x Radial Spiral Hyperbolic gradient field E(x,y) E(x,y) E(x,y)
:")
: Closure Radial Spiral")
15 Feature Extraction: Global Ownership Cues Responses over geometric patterns (max response over multiple scales): Responses over a real image are the Gestalt-like features (over multiple scales): Closure Radial Spiral Hyperbolic
 BSDS (100")
 Martin et al.")


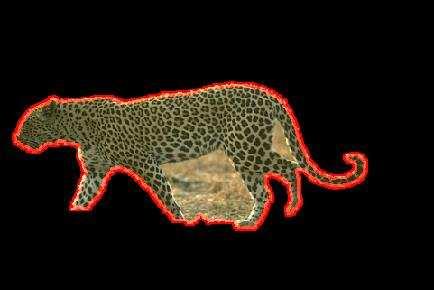
16 Results Predicted boundaries (red) and ownership (FG: green, BG:blue) BSDS (100 training/100 testing) NYU-Depth (795 training/ 654 testing) Martin et al., PAMI 2004 Silberman et al., ECCV 2012 Ownership prediction accuracy: Ren et al., ECCV 2006 Leichter & Lindenbaum, ICCV 2009 Boundary prediction accuracy: Arbelaez et al., PAMI 2011 Dollar et al., PAMI 2015

17 Results Real-time Red: Boundaries, Green: Foreground, Blue: Background
18 Outlook & Summary We have presented an approach for border ownership assignment: 1. Fast inference with state-of-the-art results. 2. Simultaneous boundary detection. 3. Validates the usefulness of shape, Gestalt and Extremal edge cues for this task. Closely related to: Saliency and attention Object proposals Application: Layered segmentation Application: Scene understanding


19 Acknowledgments Code, Data and Full Results
What Happened to the Representations of Perception? Cornelia Fermüller Computer Vision Laboratory University of Maryland
 What Happened to the Representations of Perception? Cornelia Fermüller Computer Vision Laboratory University of Maryland Why we study manipulation actions? 2. Learning from humans to teach robots Y Yang,
What Happened to the Representations of Perception? Cornelia Fermüller Computer Vision Laboratory University of Maryland Why we study manipulation actions? 2. Learning from humans to teach robots Y Yang,
Fast 2D Border Ownership Assignment
 Fast 2D Border Ownership Assignment Ching L. Teo Cornelia Fermüller Yiannis Aloimonos cteo@cs.umd.edu fer@umiacs.umd.edu yiannis@cs.umd.edu Computer Vision Lab, University of Maryland, College Park, MD
Fast 2D Border Ownership Assignment Ching L. Teo Cornelia Fermüller Yiannis Aloimonos cteo@cs.umd.edu fer@umiacs.umd.edu yiannis@cs.umd.edu Computer Vision Lab, University of Maryland, College Park, MD
The Image Torque Operator: A New Tool for Mid-level Vision
 The Image Torque Operator: A New Tool for Mid-level Vision Morimichi Nishigaki University of Maryland College Park, MD 20742 michi@cs.umd.edu Cornelia Fermüller University of Mayland College Park, MD 20742
The Image Torque Operator: A New Tool for Mid-level Vision Morimichi Nishigaki University of Maryland College Park, MD 20742 michi@cs.umd.edu Cornelia Fermüller University of Mayland College Park, MD 20742
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Contour Detection and Characterization for Asynchronous Event Sensors
 Contour Detection and Characterization for Asynchronous Event Sensors Francisco Barranco 1,2, Ching L. Teo 1, Cornelia Fermüller 1, Yiannis Aloimonos 1 1 Computer Vision Lab, University of Maryland (USA)
Contour Detection and Characterization for Asynchronous Event Sensors Francisco Barranco 1,2, Ching L. Teo 1, Cornelia Fermüller 1, Yiannis Aloimonos 1 1 Computer Vision Lab, University of Maryland (USA)
Recap from Monday. Visualizing Networks Caffe overview Slides are now online
 Recap from Monday Visualizing Networks Caffe overview Slides are now online Today Edges and Regions, GPB Fast Edge Detection Using Structured Forests Zhihao Li Holistically-Nested Edge Detection Yuxin
Recap from Monday Visualizing Networks Caffe overview Slides are now online Today Edges and Regions, GPB Fast Edge Detection Using Structured Forests Zhihao Li Holistically-Nested Edge Detection Yuxin
arxiv: v4 [cs.cv] 24 Jul 2016
![arxiv: v4 [cs.cv] 24 Jul 2016](/thumbs/93/112279982.jpg "arxiv: v4 [cs.cv] 24 Jul 2016") arxiv:5.06457v4 [cs.cv] 24 Jul 206 DOC: Deep OCclusion Estimation From a Single Image Peng Wang Alan Yuille,2 University of California, Los Angeles, 2 John Hopkins University {jerryking234, alan.l.yuille}@gmail.com
arxiv:5.06457v4 [cs.cv] 24 Jul 206 DOC: Deep OCclusion Estimation From a Single Image Peng Wang Alan Yuille,2 University of California, Los Angeles, 2 John Hopkins University {jerryking234, alan.l.yuille}@gmail.com
IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues
 2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Fixation-Based Visual Image Segmentation using the concept of Border-ownership
 Fixation-Based Visual Image Segmentation using the concept of Border-ownership Manjusha Singh 1, Abhishek Misal 2 Assistant Professor, Dept of CSE, Chhatrapati Shivaji Institute of Technology, Durg, Chattisgarh,
Fixation-Based Visual Image Segmentation using the concept of Border-ownership Manjusha Singh 1, Abhishek Misal 2 Assistant Professor, Dept of CSE, Chhatrapati Shivaji Institute of Technology, Durg, Chattisgarh,
6. Applications - Text recognition in videos - Semantic video analysis
 6. Applications - Text recognition in videos - Semantic video analysis Stephan Kopf 1 Motivation Goal: Segmentation and classification of characters Only few significant features are visible in these simple
6. Applications - Text recognition in videos - Semantic video analysis Stephan Kopf 1 Motivation Goal: Segmentation and classification of characters Only few significant features are visible in these simple
Embedding High-Level Information into Low Level Vision: Efficient Object Search in Clutter
 Embedding High-Level Information into Low Level Vision: Efficient Object Search in Clutter Ching L. Teo, Austin Myers, Cornelia Fermüller, Yiannis Aloimonos Abstract The ability to search visually for
Embedding High-Level Information into Low Level Vision: Efficient Object Search in Clutter Ching L. Teo, Austin Myers, Cornelia Fermüller, Yiannis Aloimonos Abstract The ability to search visually for
Learning the Ecological Statistics of Perceptual Organization
 Learning the Ecological Statistics of Perceptual Organization Charless Fowlkes work with David Martin, Xiaofeng Ren and Jitendra Malik at University of California at Berkeley 1 How do ideas from perceptual
Learning the Ecological Statistics of Perceptual Organization Charless Fowlkes work with David Martin, Xiaofeng Ren and Jitendra Malik at University of California at Berkeley 1 How do ideas from perceptual
Solution: filter the image, then subsample F 1 F 2. subsample blur subsample. blur
 Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Investigating How and When Perceptual Organization Cues Improve Boundary Detection in Natural Images
 Investigating How and When Perceptual Organization Cues Improve Boundary Detection in Natural Images Leandro A. Loss, George Bebis, Mircea Nicolescu Computer Vision Laboratory University of Nevada, Reno
Investigating How and When Perceptual Organization Cues Improve Boundary Detection in Natural Images Leandro A. Loss, George Bebis, Mircea Nicolescu Computer Vision Laboratory University of Nevada, Reno
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Vision and Image Processing Lab., CRV Tutorial day- May 30, 2010 Ottawa, Canada
 Spatio-Temporal Salient Features Amir H. Shabani Vision and Image Processing Lab., University of Waterloo, ON CRV Tutorial day- May 30, 2010 Ottawa, Canada 1 Applications Automated surveillance for scene
Spatio-Temporal Salient Features Amir H. Shabani Vision and Image Processing Lab., University of Waterloo, ON CRV Tutorial day- May 30, 2010 Ottawa, Canada 1 Applications Automated surveillance for scene
Saliency Detection in Aerial Imagery
 Saliency Detection in Aerial Imagery using Multi-scale SLIC Segmentation Samir Sahli 1, Daniel A. Lavigne 2 and Yunlong Sheng 1 1- COPL, Image Science group, Laval University, Quebec, Canada 2- Defence
Saliency Detection in Aerial Imagery using Multi-scale SLIC Segmentation Samir Sahli 1, Daniel A. Lavigne 2 and Yunlong Sheng 1 1- COPL, Image Science group, Laval University, Quebec, Canada 2- Defence
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Speaker: Ming-Ming Cheng Nankai University 15-Sep-17 Towards Weakly Supervised Image Understanding
 Towards Weakly Supervised Image Understanding (WSIU) Speaker: Ming-Ming Cheng Nankai University http://mmcheng.net/ 1/50 Understanding Visual Information Image by kirkh.deviantart.com 2/50 Dataset Annotation
Towards Weakly Supervised Image Understanding (WSIU) Speaker: Ming-Ming Cheng Nankai University http://mmcheng.net/ 1/50 Understanding Visual Information Image by kirkh.deviantart.com 2/50 Dataset Annotation
Fast and Bottom-Up Object Detection, Segmentation, and Evaluation using Gestalt Principles
 Fast and Bottom-Up Object Detection, Segmentation, and Evaluation using Gestalt Principles Gert Kootstra and Danica Kragic Abstract In many scenarios, domestic robot will regularly encounter unknown objects.
Fast and Bottom-Up Object Detection, Segmentation, and Evaluation using Gestalt Principles Gert Kootstra and Danica Kragic Abstract In many scenarios, domestic robot will regularly encounter unknown objects.
LEARNING BOUNDARIES WITH COLOR AND DEPTH. Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen
 LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Boundaries and Sketches
 Boundaries and Sketches Szeliski 4.2 Computer Vision James Hays Many slides from Michael Maire, Jitendra Malek Today s lecture Segmentation vs Boundary Detection Why boundaries / Grouping? Recap: Canny
Boundaries and Sketches Szeliski 4.2 Computer Vision James Hays Many slides from Michael Maire, Jitendra Malek Today s lecture Segmentation vs Boundary Detection Why boundaries / Grouping? Recap: Canny
Superpixel Segmentation using Depth
 Superpixel Segmentation using Depth Information Superpixel Segmentation using Depth Information David Stutz June 25th, 2014 David Stutz June 25th, 2014 01 Introduction - Table of Contents 1 Introduction
Superpixel Segmentation using Depth Information Superpixel Segmentation using Depth Information David Stutz June 25th, 2014 David Stutz June 25th, 2014 01 Introduction - Table of Contents 1 Introduction
Outline. Segmentation & Grouping. Examples of grouping in vision. Grouping in vision. Grouping in vision 2/9/2011. CS 376 Lecture 7 Segmentation 1
 Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
CS 2770: Computer Vision. Edges and Segments. Prof. Adriana Kovashka University of Pittsburgh February 21, 2017
 CS 2770: Computer Vision Edges and Segments Prof. Adriana Kovashka University of Pittsburgh February 21, 2017 Edges vs Segments Figure adapted from J. Hays Edges vs Segments Edges More low-level Don t
CS 2770: Computer Vision Edges and Segments Prof. Adriana Kovashka University of Pittsburgh February 21, 2017 Edges vs Segments Figure adapted from J. Hays Edges vs Segments Edges More low-level Don t
Robust Zero Watermarking for Still and Similar Images Using a Learning Based Contour Detection
 Robust Zero Watermarking for Still and Similar Images Using a Learning Based Contour Detection Shahryar Ehsaee and Mansour Jamzad (&) Department of Computer Engineering, Sharif University of Technology,
Robust Zero Watermarking for Still and Similar Images Using a Learning Based Contour Detection Shahryar Ehsaee and Mansour Jamzad (&) Department of Computer Engineering, Sharif University of Technology,
Modeling Visual Cortex V4 in Naturalistic Conditions with Invari. Representations
 Modeling Visual Cortex V4 in Naturalistic Conditions with Invariant and Sparse Image Representations Bin Yu Departments of Statistics and EECS University of California at Berkeley Rutgers University, May
Modeling Visual Cortex V4 in Naturalistic Conditions with Invariant and Sparse Image Representations Bin Yu Departments of Statistics and EECS University of California at Berkeley Rutgers University, May
Semantic Classification of Boundaries from an RGBD Image
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Semantic Classification of Boundaries from an RGBD Image Soni, N.; Namboodiri, A.; Ramalingam, S.; Jawahar, C.V. TR2015-102 September 2015
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Semantic Classification of Boundaries from an RGBD Image Soni, N.; Namboodiri, A.; Ramalingam, S.; Jawahar, C.V. TR2015-102 September 2015
Contour Detection and Hierarchical Image Segmentation Some Experiments
 Contour Detection and Hierarchical Image Segmentation Some Experiments CS395T Visual Recognition Presented by Elad Liebman Overview Understanding the method better: The importance of thresholding the ouput
Contour Detection and Hierarchical Image Segmentation Some Experiments CS395T Visual Recognition Presented by Elad Liebman Overview Understanding the method better: The importance of thresholding the ouput
Visual Material Traits Recognizing Per-Pixel Material Context
 Visual Material Traits Recognizing Per-Pixel Material Context Gabriel Schwartz gbs25@drexel.edu Ko Nishino kon@drexel.edu 1 / 22 2 / 22 Materials as Visual Context What tells us this road is unsafe? 3
Visual Material Traits Recognizing Per-Pixel Material Context Gabriel Schwartz gbs25@drexel.edu Ko Nishino kon@drexel.edu 1 / 22 2 / 22 Materials as Visual Context What tells us this road is unsafe? 3
Precision-Recall-Classification Evaluation Framework: Application to Depth Estimation on Single Images
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Precision-Recall-Classification
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Precision-Recall-Classification
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Decomposing a Scene into Geometric and Semantically Consistent Regions
 Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
CS 556: Computer Vision. Lecture 18
 CS 556: Computer Vision Lecture 18 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Color 2 Perception of Color The sensation of color is caused by the brain Strongly affected by: Other nearby colors
CS 556: Computer Vision Lecture 18 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Color 2 Perception of Color The sensation of color is caused by the brain Strongly affected by: Other nearby colors
Closing the Loop for Edge Detection and Object Proposals
 Closing the Loop for Edge Detection and Object Proposals Yao Lu and Linda Shapiro University of Washington {luyao, shapiro}@cs.washington.edu Abstract Edge grouping and object perception are unified procedures
Closing the Loop for Edge Detection and Object Proposals Yao Lu and Linda Shapiro University of Washington {luyao, shapiro}@cs.washington.edu Abstract Edge grouping and object perception are unified procedures
Recognition of the Target Image Based on POM
 Recognition of the Target Image Based on POM R.Haritha Department of ECE SJCET Yemmiganur K.Sudhakar Associate Professor HOD, Department of ECE SJCET Yemmiganur T.Chakrapani Associate Professor Department
Recognition of the Target Image Based on POM R.Haritha Department of ECE SJCET Yemmiganur K.Sudhakar Associate Professor HOD, Department of ECE SJCET Yemmiganur T.Chakrapani Associate Professor Department
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS
 CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
Lecture 16 Segmentation and Scene understanding
 Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Surfaces. Science B44. Lecture 11 Surfaces. Surfaces. 1. What problem do surfaces solve? 2. How are surfaces discovered
 Science B44 Lecture 11 Surfaces Surfaces 1. What problem do surfaces solve 2. How are surfaces discovered, grouping 3. Modal and amodal completion 4. Border ownership and figure-ground 5. Top-down help
Science B44 Lecture 11 Surfaces Surfaces 1. What problem do surfaces solve 2. How are surfaces discovered, grouping 3. Modal and amodal completion 4. Border ownership and figure-ground 5. Top-down help
STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE. Nan Hu. Stanford University Electrical Engineering
 STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE Nan Hu Stanford University Electrical Engineering nanhu@stanford.edu ABSTRACT Learning 3-D scene structure from a single still
STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE Nan Hu Stanford University Electrical Engineering nanhu@stanford.edu ABSTRACT Learning 3-D scene structure from a single still
Medial Features for Superpixel Segmentation
 Medial Features for Superpixel Segmentation David Engel Luciano Spinello Rudolph Triebel Roland Siegwart Heinrich H. Bülthoff Cristóbal Curio Max Planck Institute for Biological Cybernetics Spemannstr.
Medial Features for Superpixel Segmentation David Engel Luciano Spinello Rudolph Triebel Roland Siegwart Heinrich H. Bülthoff Cristóbal Curio Max Planck Institute for Biological Cybernetics Spemannstr.
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation and Grouping
 CS 1699: Intro to Computer Vision Segmentation and Grouping Prof. Adriana Kovashka University of Pittsburgh September 24, 2015 Goals: Grouping in vision Gather features that belong together Obtain an intermediate
CS 1699: Intro to Computer Vision Segmentation and Grouping Prof. Adriana Kovashka University of Pittsburgh September 24, 2015 Goals: Grouping in vision Gather features that belong together Obtain an intermediate
Learning Spatial Context: Using Stuff to Find Things
 Learning Spatial Context: Using Stuff to Find Things Wei-Cheng Su Motivation 2 Leverage contextual information to enhance detection Some context objects are non-rigid and are more naturally classified
Learning Spatial Context: Using Stuff to Find Things Wei-Cheng Su Motivation 2 Leverage contextual information to enhance detection Some context objects are non-rigid and are more naturally classified
Cue Integration for Figure/Ground Labeling
 Cue Integration for Figure/Ground Labeling Xiaofeng Ren, Charless C. Fowlkes and Jitendra Malik Computer Science Division, University of California, Berkeley, CA 94720 {xren,fowlkes,malik}@cs.berkeley.edu
Cue Integration for Figure/Ground Labeling Xiaofeng Ren, Charless C. Fowlkes and Jitendra Malik Computer Science Division, University of California, Berkeley, CA 94720 {xren,fowlkes,malik}@cs.berkeley.edu
Learning and Matching Line Aspects for Articulated Objects
 Learning and Matching Line Aspects for Articulated Objects Xiaofeng Ren Toyota Technological Institute at Chicago 1427 E. 6th Street, Chicago, IL 6637 xren@tti-c.org Abstract Traditional aspect graphs
Learning and Matching Line Aspects for Articulated Objects Xiaofeng Ren Toyota Technological Institute at Chicago 1427 E. 6th Street, Chicago, IL 6637 xren@tti-c.org Abstract Traditional aspect graphs
Context. CS 554 Computer Vision Pinar Duygulu Bilkent University. (Source:Antonio Torralba, James Hays)
") Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Active Segmentation for Robotics
 Active Segmentation for Robotics Ajay Mishra Yiannis Aloimonos Cornelia Fermuller Institute for Advanced Computer Studies University of Maryland, College Park, MD 20742 {mishraka@umiacs,yiannis@cs,fer@umiacs}.umd.edu
Active Segmentation for Robotics Ajay Mishra Yiannis Aloimonos Cornelia Fermuller Institute for Advanced Computer Studies University of Maryland, College Park, MD 20742 {mishraka@umiacs,yiannis@cs,fer@umiacs}.umd.edu
High Level Computer Vision. Basic Image Processing - April 26, 2o17. Bernt Schiele - Mario Fritz -
 High Level Computer Vision Basic Image Processing - April 26, 2o17 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de mpi-inf.mpg.de/hlcv Today - Basics of Digital Image Processing
High Level Computer Vision Basic Image Processing - April 26, 2o17 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de mpi-inf.mpg.de/hlcv Today - Basics of Digital Image Processing
Edge Detection. Computer Vision Shiv Ram Dubey, IIIT Sri City
 Edge Detection Computer Vision Shiv Ram Dubey, IIIT Sri City Previous two classes: Image Filtering Spatial domain Smoothing, sharpening, measuring texture * = FFT FFT Inverse FFT = Frequency domain Denoising,
Edge Detection Computer Vision Shiv Ram Dubey, IIIT Sri City Previous two classes: Image Filtering Spatial domain Smoothing, sharpening, measuring texture * = FFT FFT Inverse FFT = Frequency domain Denoising,
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
CMPSCI 670: Computer Vision! Grouping
 CMPSCI 670: Computer Vision! Grouping University of Massachusetts, Amherst October 14, 2014 Instructor: Subhransu Maji Slides credit: Kristen Grauman and others Final project guidelines posted Milestones
CMPSCI 670: Computer Vision! Grouping University of Massachusetts, Amherst October 14, 2014 Instructor: Subhransu Maji Slides credit: Kristen Grauman and others Final project guidelines posted Milestones
Seeing the unseen. Data-driven 3D Understanding from Single Images. Hao Su
 Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Deep Convolutional Neural Networks. Nov. 20th, 2015 Bruce Draper
 Deep Convolutional Neural Networks Nov. 20th, 2015 Bruce Draper Background: Fully-connected single layer neural networks Feed-forward classification Trained through back-propagation Example Computer Vision
Deep Convolutional Neural Networks Nov. 20th, 2015 Bruce Draper Background: Fully-connected single layer neural networks Feed-forward classification Trained through back-propagation Example Computer Vision
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Detecting Salient Contours Using Orientation Energy Distribution. Part I: Thresholding Based on. Response Distribution
 Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Lecture 16: Object recognition: Part-based generative models
 Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Grouping and Segmentation
 03/17/15 Grouping and Segmentation Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Segmentation and grouping Gestalt cues By clustering (mean-shift) By boundaries (watershed)
03/17/15 Grouping and Segmentation Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Segmentation and grouping Gestalt cues By clustering (mean-shift) By boundaries (watershed)
SYMMETRY DETECTION VIA CONTOUR GROUPING
 SYMMETRY DETECTION VIA CONTOUR GROUPING Yansheng Ming, Hongdong Li Australian National University Xuming He NICTA ABSTRACT This paper presents a simple but effective model for detecting the symmetric axes
SYMMETRY DETECTION VIA CONTOUR GROUPING Yansheng Ming, Hongdong Li Australian National University Xuming He NICTA ABSTRACT This paper presents a simple but effective model for detecting the symmetric axes
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Detecting Object Boundaries Using Low-, Mid-, and High-level Information
 Detecting Object Boundaries Using Low-, Mid-, and High-level Information Songfeng Zheng Dept. of Statistics, UCLA sfzheng@stat.ucla.edu Zhuowen Tu Lab of Neuro Imaging, UCLA zhuowen.tu@loni.ucla.edu Alan
Detecting Object Boundaries Using Low-, Mid-, and High-level Information Songfeng Zheng Dept. of Statistics, UCLA sfzheng@stat.ucla.edu Zhuowen Tu Lab of Neuro Imaging, UCLA zhuowen.tu@loni.ucla.edu Alan
GEDContours: A High Speed Contour Detector for Grayscale Images
 GEDContours: A High Speed Contour Detector for Grascale Images Cunet Akinlar cakinlar@anadolu.edu.tr Anadolu Universit, Computer Engineering Department, Eskisehir, Turke Abstract We propose a high-speed
GEDContours: A High Speed Contour Detector for Grascale Images Cunet Akinlar cakinlar@anadolu.edu.tr Anadolu Universit, Computer Engineering Department, Eskisehir, Turke Abstract We propose a high-speed
Segmentation and Grouping April 19 th, 2018
 Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Scale-Invariant Contour Completion using Conditional Random Fields
 Scale-Invariant Contour Completion using Conditional Random Fields Xiaofeng Ren, Charless C. Fowlkes, Jitendra Malik Computer Science Division University of California, Berkeley, CA 9472 {xren,fowlkes,malik}@cs.berkeley.edu
Scale-Invariant Contour Completion using Conditional Random Fields Xiaofeng Ren, Charless C. Fowlkes, Jitendra Malik Computer Science Division University of California, Berkeley, CA 9472 {xren,fowlkes,malik}@cs.berkeley.edu
Contour-Based Recognition
 Contour-Based Recognition Yong Xu 1, Yuhui Quan 1, Zhuming Zhang 1, Hui Ji 2, Cornelia Fermüller 3, Morimichi Nishigaki 3 and Daniel Dementhon 4 1 School of Computer Science & Engineering, South China
Contour-Based Recognition Yong Xu 1, Yuhui Quan 1, Zhuming Zhang 1, Hui Ji 2, Cornelia Fermüller 3, Morimichi Nishigaki 3 and Daniel Dementhon 4 1 School of Computer Science & Engineering, South China
PERCEPTION. 2D1380 Artificial Intelligence. 2D1380 Artificial Intelligence. 2D1380 Artificial Intelligence. 2D1380 Artificial Intelligence
 PERCEPTION Danica Kragic Computer vision Develop computational models and algorithms that can be used for solving visual tasks and for interacting with the world. Applications: robot vision (autonomous
PERCEPTION Danica Kragic Computer vision Develop computational models and algorithms that can be used for solving visual tasks and for interacting with the world. Applications: robot vision (autonomous
Grouping and Segmentation
 Grouping and Segmentation CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Kristen Grauman ) Goals: Grouping in vision Gather features that belong together Obtain an intermediate representation
Grouping and Segmentation CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Kristen Grauman ) Goals: Grouping in vision Gather features that belong together Obtain an intermediate representation
LSTM and its variants for visual recognition. Xiaodan Liang Sun Yat-sen University
 LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
CPSC 532E Week 6: Lecture. Surface Perception; Completion
 Week 6: Lecture Surface Perception; Completion Reflectance functions Shape from shading; shape from texture Visual Completion Figure/Ground ACM Transactions on Applied Perception - Call for papers Numerous
Week 6: Lecture Surface Perception; Completion Reflectance functions Shape from shading; shape from texture Visual Completion Figure/Ground ACM Transactions on Applied Perception - Call for papers Numerous
Detecting Junctions in Photographs of Objects. Abstract. the gp b algorithm (Arbeláez et al., 2010) uses local cues such as brightness, color,
 uses local cues such as brightness, color,") Thesis advisor Todd Zickler Author Hyunho Richard Lee Detecting Junctions in Photographs of Objects Abstract Line drawings are inherently simple, yet retain most of the information of a full image. This
Thesis advisor Todd Zickler Author Hyunho Richard Lee Detecting Junctions in Photographs of Objects Abstract Line drawings are inherently simple, yet retain most of the information of a full image. This
Learning Attention Map from Images
 Learning Attention Map from Images Yao Lu, Wei Zhang, Cheng Jin and Xiangyang Xue School of Computer Science, Fudan University, Shanghai, China {yaolu, weizh, jc, xyxue}@fudan.edu.cn Abstract While bottom-up
Learning Attention Map from Images Yao Lu, Wei Zhang, Cheng Jin and Xiangyang Xue School of Computer Science, Fudan University, Shanghai, China {yaolu, weizh, jc, xyxue}@fudan.edu.cn Abstract While bottom-up
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Towards Spatio-Temporally Consistent Semantic Mapping
 Towards Spatio-Temporally Consistent Semantic Mapping Zhe Zhao, Xiaoping Chen University of Science and Technology of China, zhaozhe@mail.ustc.edu.cn,xpchen@ustc.edu.cn Abstract. Intelligent robots require
Towards Spatio-Temporally Consistent Semantic Mapping Zhe Zhao, Xiaoping Chen University of Science and Technology of China, zhaozhe@mail.ustc.edu.cn,xpchen@ustc.edu.cn Abstract. Intelligent robots require
LEARNING-BASED DEPTH ESTIMATION FROM 2D IMAGES USING GIST AND SALIENCY. José L. Herrera Janusz Konrad Carlos R. del-bianco Narciso García
 LEARNING-BASED DEPTH ESTIMATION FROM 2D IMAGES USING GIST AND SALIENCY José L. Herrera Janusz Konrad Carlos R. del-bianco Narciso García ABSTRACT Although there has been a significant proliferation of
LEARNING-BASED DEPTH ESTIMATION FROM 2D IMAGES USING GIST AND SALIENCY José L. Herrera Janusz Konrad Carlos R. del-bianco Narciso García ABSTRACT Although there has been a significant proliferation of
Multi-script Text Extraction from Natural Scenes
 Multi-script Text Extraction from Natural Scenes Lluís Gómez and Dimosthenis Karatzas Computer Vision Center Universitat Autònoma de Barcelona Email: {lgomez,dimos}@cvc.uab.es Abstract Scene text extraction
Multi-script Text Extraction from Natural Scenes Lluís Gómez and Dimosthenis Karatzas Computer Vision Center Universitat Autònoma de Barcelona Email: {lgomez,dimos}@cvc.uab.es Abstract Scene text extraction
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Segmentation with non-linear constraints on appearance, complexity, and geometry
 IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
Scale-invariant shape features for recognition of object categories
 Scale-invariant shape features for recognition of object categories Frédéric Jurie and Cordelia Schmid GRAVIR, INRIA-CNRS, 655 avenue de l Europe, Montbonnot 38330, France {Frederic.Jurie, Cordelia.Schmid}@inrialpes.fr,
Scale-invariant shape features for recognition of object categories Frédéric Jurie and Cordelia Schmid GRAVIR, INRIA-CNRS, 655 avenue de l Europe, Montbonnot 38330, France {Frederic.Jurie, Cordelia.Schmid}@inrialpes.fr,
Computer Vision I. Announcement. Corners. Edges. Numerical Derivatives f(x) Edge and Corner Detection. CSE252A Lecture 11
 Edge and Corner Detection. CSE252A Lecture 11") Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
3D Object Recognition: A Model of View-Tuned Neurons
 3D Object Recognition: A Model of View-Tuned Neurons Emanuela Bricolo Tomaso Poggio Department of Brain and Cognitive Sciences Massachusetts Institute of Technology Cambridge, MA 02139 {emanuela,tp}gai.mit.edu
3D Object Recognition: A Model of View-Tuned Neurons Emanuela Bricolo Tomaso Poggio Department of Brain and Cognitive Sciences Massachusetts Institute of Technology Cambridge, MA 02139 {emanuela,tp}gai.mit.edu
Quasi-thematic Features Detection & Tracking. Future Rover Long-Distance Autonomous Navigation
 Quasi-thematic Feature Detection And Tracking For Future Rover Long-Distance Autonomous Navigation Authors: Affan Shaukat, Conrad Spiteri, Yang Gao, Said Al-Milli, and Abhinav Bajpai Surrey Space Centre,
Quasi-thematic Feature Detection And Tracking For Future Rover Long-Distance Autonomous Navigation Authors: Affan Shaukat, Conrad Spiteri, Yang Gao, Said Al-Milli, and Abhinav Bajpai Surrey Space Centre,
Evaluation of regions-of-interest based attention algorithms using a probabilistic measure
 Evaluation of regions-of-interest based attention algorithms using a probabilistic measure Martin Clauss, Pierre Bayerl and Heiko Neumann University of Ulm, Dept. of Neural Information Processing, 89081
Evaluation of regions-of-interest based attention algorithms using a probabilistic measure Martin Clauss, Pierre Bayerl and Heiko Neumann University of Ulm, Dept. of Neural Information Processing, 89081
Supplementary Materials for Salient Object Detection: A
 Supplementary Materials for Salient Object Detection: A Discriminative Regional Feature Integration Approach Huaizu Jiang, Zejian Yuan, Ming-Ming Cheng, Yihong Gong Nanning Zheng, and Jingdong Wang Abstract
Supplementary Materials for Salient Object Detection: A Discriminative Regional Feature Integration Approach Huaizu Jiang, Zejian Yuan, Ming-Ming Cheng, Yihong Gong Nanning Zheng, and Jingdong Wang Abstract
Fast Edge Detection Using Structured Forests
 Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
Figure/Ground Assignment in Natural Images
 igure/round Assignment in Natural Images Xiaofeng Ren, Charless C. owlkes and Jitendra Malik Computer Science Division University of California at Berkeley Berkeley, CA 94720 USA Abstract. igure/ground
igure/round Assignment in Natural Images Xiaofeng Ren, Charless C. owlkes and Jitendra Malik Computer Science Division University of California at Berkeley Berkeley, CA 94720 USA Abstract. igure/ground
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Efficient Visual Coding: From Retina To V2
 Efficient Visual Coding: From Retina To V Honghao Shan Garrison Cottrell Computer Science and Engineering UCSD La Jolla, CA 9093-0404 shanhonghao@gmail.com, gary@ucsd.edu Abstract The human visual system
Efficient Visual Coding: From Retina To V Honghao Shan Garrison Cottrell Computer Science and Engineering UCSD La Jolla, CA 9093-0404 shanhonghao@gmail.com, gary@ucsd.edu Abstract The human visual system
Reconstructive Sparse Code Transfer for Contour Detection and Semantic Labeling
 Reconstructive Sparse Code Transfer for Contour Detection and Semantic Labeling Michael Maire 1,2 Stella X. Yu 3 Pietro Perona 2 1 TTI Chicago 2 California Institute of Technology 3 University of California
Reconstructive Sparse Code Transfer for Contour Detection and Semantic Labeling Michael Maire 1,2 Stella X. Yu 3 Pietro Perona 2 1 TTI Chicago 2 California Institute of Technology 3 University of California
Object Recognition and Segmentation in Indoor Scenes from RGB-D Images
 Object Recognition and Segmentation in Indoor Scenes from RGB-D Images Md. Alimoor Reza Department of Computer Science George Mason University mreza@masonlive.gmu.edu Jana Kosecka Department of Computer
Object Recognition and Segmentation in Indoor Scenes from RGB-D Images Md. Alimoor Reza Department of Computer Science George Mason University mreza@masonlive.gmu.edu Jana Kosecka Department of Computer
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous