arxiv: v1 [cs.cv] 17 Oct 2016
|
|
|
- Gwendolyn O’Neal’
- 5 years ago
- Views:
Transcription

1 Parse Geometry from a Line: Monocular Depth Estimation with Partial Laser Observation Yiyi Liao 1, Lichao Huang 2, Yue Wang 1, Sarath Kodagoda 3, Yinan Yu 2, Yong Liu 1 arxiv: v1 [cs.cv] 17 Oct 2016 Abstract Many standard robotic platforms are equipped with at least a fixed 2D laser range finder and a monocular camera. Although those platforms do not have sensors for 3D depth sensing capability, knowledge of depth is an essential part in many robotics activities. Therefore, recently, there is an increasing interest in depth estimation using monocular images. As this task is inherently ambiguous, the data-driven estimated depth might be unreliable in robotics applications. In this paper, we have attempted to improve the precision of monocular depth estimation by introducing 2D planar observation from the remaining laser range finder without extra cost. Specifically, we construct a dense reference map from the sparse laser range data, redefining the depth estimation task as estimating the distance between the real and the reference depth. To solve the problem, we construct a novel residual of residual neural network, and tightly combine the classification and regression losses for continuous depth estimation. Experimental results suggest that our method achieves considerable promotion compared to the state-of-the-art methods on both NYUD2 and KITTI, validating the effectiveness of our method on leveraging the additional sensory information. We further demonstrate the potential usage of our method in obstacle avoidance where our methodology provides comprehensive depth information compared to the solution using monocular camera or 2D laser range finder alone. I. INTRODUCTION Depth information plays an important role in daily lives of human, and is also a valuable cue in computer vision and robotics tasks. Many research works have demonstrated the benefit of introducing the depth information for tasks such as object recognition and scene understanding [1] [3]. Recently, some researchers have opted to use monocular cameras to estimate the depths because of its inherent practical value. Monocular depth estimation is particularly challenging as it is a well known ill-posed problem. It is non trivial due to the vast amount of monocular depth cues, such as object sizes, texture gradients and overlaps needed for such depth estimations, in addition with the global scale of the scene. Thanks to the development of the deep convolutional neural networks over the recent years, remarkable advances are achieved on the task of monocular depth estimation [4] [8]. A possible reason is that the monocular cues can be better modeled with the larger capacity of the deep network. However, the global scale of the scene remains a major 1 Yiyi Liao, Yue Wang and Yong Liu are with the State Key Laboratory of Industrial Control Technology and Institute of Cyber-Systems and Control, Zhejiang University, Zhejiang, , China. Yong Liu is the corresponding author of this paper, yongliu@iipc.zju.edu.cn. 2 Lichao Huang and Yinan Yu are with the Horizon Robotics, China. 3 Sarath Kodagoda is with the Centre for Autonomous Systems (CAS), The University of Technology, Sydney, Australia. Fig. 1. Illustration of our proposed method. The input of our method is a single image and a planar of 2D laser range data, obtained from a monocular camera and a 2D laser range finder. The aim of this paper is to precisely estimate the dense depth of the full scene. ambiguity in monocular depth estimation [4]. With this ambiguity, the depth estimation result might be unreliable for robotics applications such as obstacle avoidance. In this regard, a natural option to consider is to see whether the global ambiguity can be resolved using complementary sensory information. We want to exploit this idea by introducing limited direct depth observations to the monocular depth estimation task using a planar 2D laser range finder. With the availability of cheap 2D laser range finders, this option can be attractive in robotics applications in terms of accuracy and cost of sensing. Illustrative examples can be found in Figure 1. Ideally, the partially observed depth information can be employed to better estimate the global scale while the monocular image can be exploited for the relative depth estimation. To achieve this goal, we construct a novel convolutional neural network architecture to solve the partially observed depth estimation task. For mobile robots, the proposed configuration for partial depth observation is very common. Many well-known robots such as Pioneer 1 and K5 Security Robot 2 are equipped with a camera and a 2D laser range finder. The 2D laser range finder is indispensable for navigation and obstacle avoidance on the mobile robot [9], [10]. We demonstrate that our method facilitates greater perception for obstacle avoidance compared to that of a single 2D laser range finder, as the latter has a very limited vertical field of view which might be insufficient to completely reflect the surrounding environments especially with voids. Therefore, our method is a painless extension for most mobile robots with no requirement of additional cost

2 The key task of this paper is to effectively leverage the limited and sparse 2D laser data for precisely estimation of the completed and dense depth. We formulate this problem as an end-to-end learning task based on a novel fully convolutional neural network. The contribution of this paper can be summarized as follows: We introduce the 2D laser range data to the task of monocular depth estimation by constructing a dense reference depth map from the sparse observation. With the dense reference map, the task of estimating the depth is redefined as estimating the residual depth between the real depth and the reference depth. To explicitly estimate the residual depth, we construct a novel network architecture named residual of residual neural network. Besides, the network combines both classification and regression losses for effectively estimating the continuous depth value. We conduct experiments on both indoor and outdoor environments and gain considerable promotion compared to the state-of-the-art monocular depth estimation methods, as well as another partially observed depth estimation method. We further demonstrate its potential usage in obstacle avoidance for mobile robots. The remainder of the paper is organized as follow: Section II gives a review of related works. The methodology for solving the partially observed depth estimation task is given in Section III, and the experimental results are presented in Section IV. Finally, we conclude the paper in Section V. II. RELATED WORKS In recent years, deep learning methods are intensively exploited in depth estimation using single images [4] [8]. Deep networks are validated to be more effective compared to the conventional methods based on hand-crafted features and graphical models [11], [12]. Eigen et al. [4] firstly proposed to regress the depth value in the end-to-end framework using deep neural network. That work was extended to simultaneously estimate the depths, surface normals and semantic labels in their latter work [5]. Liu et al. [6] proposed to combine Conditional Random Field (CRF) and the deep neural network for depth estimation. The deep neural network learned the unary and pairwise potentials and the CRF was jointly optimized with the network. More recently, Laina et al. [7] and Cao et al. [8] tackled the depth estimation task based on the Residual Neural Network (ResNet) [13], which won the first place on the classification and detection competition tasks at ILSVRC and COCO in Specifically, Laina et al. [7] regressed the depth value using the fully convolutional ResNet, and a novel up-convolutional scheme was developed for fine-grained estimation. Instead of regression, Cao et al. [8] regarded the depth estimation as a classification task, where the estimation probability could be obtained for refinement using CRF. Taking the advantage of the deep ResNet, Laina et al. [7] and Cao et al. [8] set a new baseline in the depth estimation task. As can be seen, previous works indicate a trend of learning all the variations in depth estimation using one deeper model, Fig. 2. Pipeline of the proposed method. A 3D surface is generated from the 2D laser scan along the gravity directly, which is then rendered to the image plane to generate a dense reference depth map. By combining the image and the reference depth, we estimate the depth based on a discriminative neural network, where the residual between the reference depth and the actual depth is explicitly estimated within the network. which might be difficult for disambiguating the global scale. Differently, in this paper, we propose to take the advantage of an external but common sensor on mobile robots to get an relatively reliable estimation of the global scale, upon which the variation that need to be modeled by the network could be reduced. To solve this partially observed depth estimation task, we propose a novel architecture of fully convolutional network. In robotics scenario, there are also attempts for depth estimation with partially observed depths. A popular topic is the dense depth reconstruction with fusion of sparse 3D laser range data and the monocular image [14], [15]. As the 3D laser range data is obtained, this problem is usually formulated as an inpainting problem considering the measurement compatibility and the smoothness regularization. Both [14] and [15] made efforts on designing the regularization term and presented outstanding performances, where the former introduced a second order smoothness term and the latter searched optimal regularizer for different scenes. It is to be noted that the inpainting method requires the laser range data to cover most of the scene, which means it can only work with 3D laser range finder. With only a single planar view of 2D laser range data, the inpainting formulation is intractable due to severely insufficient information. In this paper, we state the partially observed task as a discriminative learning task, which can estimate the depth even with a planar view. A relatively similar work to this paper is [16]. The authors proposed to use a Multi-modal Auto-Encoder to impute the missing depth in the sparse depth map estimated by structure from motion. In this paper, we alternatively estimate the residual between the real depth and the reference depth, which is shown to be more effective in the experiments. III. METHOD In this section, we present our novel methods for the partial observation task. The pipeline of our method is illustrated in Figure 2, which is composed of the input construction and the discriminative neural network.

3 Fig. 3. Our residual of residual network architecture. The network is designed based on the ResNet-50, with 50 convolutional layers and 5 deconvolutional layers. We add a global identity skip to send the reference depth to the last feature layer, which is denoted as the red line in the figure. The global identity skip encourages the network to explicitly learn the residual depth. Best viewed in color. A. Construction of reference depth Given the partially observed depth data with a 2D laser range finder, a naive idea of generating a sparse depth map is by associating the available laser range depths to pixels and rest of all the pixels are padded with zeros [16]. Intuitively, the network can hardly learn useful information from the sparse depth map generated using 2D laser range data due to the extremely sparse distribution. On the other hand, such sparse depth map is a mixture of two different categories of values. The zero value filled in the unknown region is the logical code to denote whether there is a valid depth value, while the depth value is a real number for the distance. Mixing the logical code and the depth value in the same map might confuse the network. To avoid the problems mentioned above, we construct a dense reference map where every pixel is assigned with a depth value, which we name as reference depth map. The generation process is visualized in Figure 2. Firstly, median filtering is applied to the laser scan readings for smoothness, followed by interpolation between adjacent laser points. The linear interpolation is employed for imputing the missing depth values. Secondly, at each point in the imputed laser scan, we generate a line along the gravity direction in 3D space, resulting in a family of lines composing a surface vertical to the ground plane. Finally, by rendering this virtual surface to the image plane of the corresponding monocular camera, we can obtain the dense reference depth map. A related work to our reference depth map is Stixel [17], which compactly represents the scene as many vertical rectangular sticks. Their work validates the feasibility of our depth map construction pipeline in real situation. After constructing the reference depth map, it is concatenated with the corresponding image as the input of the subsequent neural network for learning. Note that with a dense reference depth map as the input, the task of the depth estimator is transformed to sculpting a depth value from the reference, while it is originally formulated as creating a depth value from the unknown. This transformation significantly changes the declaration of the depth estimation problem, which we consider as one crucial reason for boosting the performance. B. Residual of residual network In order to sculpt the depth from the reference map, we want to estimate the difference between the real depth and the reference map, which we formally denote as residual depth. Here we use the residual neural network (ResNet) [13] as our network backbone because of its inherent design to learn the residual, as well as its superior performance on a wide range of computer vision tasks recently. It should be noted that, the residual in this paper, is assigned with exact physical concept, which reveals whether the actual depth is closer or further than the reference depth at each pixel. However, in the original ResNet, the network is actually learning a transformed residual since the input experiences nonlinear transformations during the feed-forward propagation. Thus we propose the residual of residual network to explicitly estimate the residual depth, which is particularly suited to the partially observed estimation tasks. Our network architecture is illustrated in Figure 3, where the main branch is a fully convolutional network extended from the standard ResNet-50. ResNet is composed of two kinds of residual blocks, i.e. the scaled residual blocks and the identical residual blocks. In both residual blocks, there are two branches, the lower one is an identity skip connection aiming at preserving the information of the block input, and the upper one consists of three convolutional layers which are encouraged to model the residual with respect to the input. Both kinds of blocks can be represented as x l+1 = σ(f (x l, W l ) + h(x l )) (1) where x l is the input of the lth block, W l is the weights of the three convolutional layers of the lth block, σ(x) = max(0, x) is the nonlinear ReLU layer. For the scaled residual blocks, h( ) is a convolutional layer to scale the feature maps, while in identical residual blocks h(x) is an identity mapping. Considering the nonlinear ReLU layer, as F (x l, W l ) and h(x l ) are not ensured to be positive, we have
4 the inequality σ(f (x l, W l ) + h(x l )) σ(f (x l, W l )) + σ(h(x l )) (2) Due to the existence of the nonlinear mapping, the block does not exactly learning the residual x l+1 x l between the input and the output, even though h( ) is the identity mapping in the identical residual block. Consequently, the full network learns a transformed residual between the network input x 0 and the final network output x L, rather than the residual depth x L x 0, where x 0 denotes the reference depth and x L denotes the actual depth in our model. In addition, the deconvolutional layers located between the residual blocks and the network output further transform the feature maps and interrupt our initial attempt for learning the residual depth. To encourage the network to explicitly learn to sculpt the depth from the reference depth, we add a global identity skip as the red line in Figure 3 to directly send the reference depth to the last feature map before the output, which can be presented as x L = x L 1 + x 0. Thus x L 1 is enforced to explicitly learn the residual depth map x L x 0. Hence there are two categories of identity skips in our network, i.e. the local identity skips connecting each residual block and the global identity skip connecting the full network, that is the reason it is called the residual of residual network. C. Combination of classification and regression Previous works usually formulate the depth estimation problem as a classification task or a regression task [4] [8]. In this paper, we construct a loss function tightly combining the classification loss and the regression loss. Specifically, a softmax layer is added on top of the final deconvolution layer as visualized in Figure 3. For classification, all depth values are discretized into K bins, where the center depth value of each bin is denoted as k. We set K = 101 in our experiments. Let us denote the input feature vector of the softmax layer as f i, then the probability of the corresponding sample i being assigned to the discretized depth k is computed as p k i = exp(f T i θ k) K k=1 exp(f T i θ k) Then the predicted depth is given as (3) ŷ i = arg max p k i (4) k As (4) can only provide a discretized depth estimation, we propose to calculate the predicted depth using the expected value as K ȳ i = p k i k (5) k=1 By calculating the expected value, we obtain a continuous depth estimation. The expectation is also more robust than the discretized value with the maximal probability. Furthermore, it is also more convenient for calculating the gradients with respect to the expected value (5) compared to the argmax value (4). With the predicted probability, the softmax classification loss is given as L c = M i=1 k=1 K δ([y i ] k) log(p k i ) (6) where M is the number of all samples, y i is the ground truth depth and [y i ] is the center depth value of the discretized bin that y i falls in. δ(x) = 1 when x = 0, otherwise δ(x) = 0. For regression, we use L1 loss to generate a constant gradient even when the difference is small, which is formulated as M L r = y i ȳ i (7) i=1 Then we combine the classification loss and the regression loss to train the network as L = L c + αl r (8) where α is the constant weight term. We set α = 1 in our experiments. When compared with individual classification or regression losses, our combination of both these two losses brings the following remarks: The classification loss alone cannot distinguish the difference across discretized bins while regression is able to provide larger penalty to the larger predictive errors. If the estimated depth falls into the correct bin, then the classification loss would vanish. The regression loss still works to eliminate the small loss within the bin, leading to a finer estimation. Compared to the solution with regression loss alone, our method can provide a probabilistic distribution. Furthermore, as the depth is computed as the expected value, it has a fixed range and thus is more robust compared to the direct regression. D. Estimation refinement As shown in Figure 3, the network outputs the predicted depth by summing the reference depth and the residual depth, without additional trainable layers. We further refine the predicted depth by applying the median filtering. It can reduce the noises generated from the summation and slightly promote the estimation performance. IV. EXPERIMENTS The experiments were preferably carried out on publicly available data sets for benchmarking and easier comparison. In this paper, we evaluate our method on the indoor dataset NYUD2 [1] and the outdoor dataset KITTI [18]. A. Experimental setup NYUD2 [1] is an indoor dataset collected using the Microsoft Kinect. It covers 464 scenes with 4 million raw image and depth pairs. We follow the official split to use 249 scenes for training and 215 scenes for testing. We sampled 50,000 images from the raw training data for training, where
5 the missing depth values were masked out during the training process. Test set includes 654 images with filled-in depth values, which is the same as the other monocular depth estimation methods [4] [8]. We simulated a laser scan that was perpendicular to the gravity direction, with a fixed height above the ground plane. In our experiment, the height was set as 80cm. Since NYUD2 is collected using a hand-held Kinect, the camera pose varies a lot between different frames, leading to an uncertain gravity direction. Thus we follow Gupta. et al [19] to estimate the gravity direction, of which we observe the accuracy is acceptable in our experiments. For the outdoor dataset KITTI [18], we use three scene categories ( City, Residential and Road ) in the raw data for training and testing, the same as Eigen et al. [4]. We sampled 5,000 images captured by the left color camera from 30 scenes for training, and 632 images from other 29 scenes for testing. With the relative small training set, the network is initialized with the weights learned from NYUD2. The ground truth depth was obtained with a Velodyne HDL- 64E 3D laser scanner, where the missing depth was masked out for both training and testing. As the Velodyne laser scanner observed 64 laser scans in each frame, we simulated a 2D laser range finder by taking one of the laser scans as our partially observed data. The laser scan was selected to be within a fixed range of polar angle in the spherical coordinate, which was set as 88 ± 2 in our experiment. As the sensors were fixed on a mobile car in the KITTI, the gravity direction was fixed for all frames and could be obtained from the offline calibration. It is to be noted that the gravity direction is also fixed in practical applications of both indoor and outdoor robots, and there is no requirement for the additional estimation of the gravity direction. For the network configuration, both image and reference depth in NYUD2 were reshaped as , and the predicted size was The input size of KITTI was set as , with output size Though the depth is only available at the half bottom of the image in KITTI, we input the full image into the network for learning the context. Note that the predicted result was up-scaled to the original size for evaluation on both NYUD2 and KITTI. We implemented our residual of residual network based on Caffe [20]. Following ResNet, we also used batch normalization for efficient convergence and the batchsize was set as 16. The loss was summed over all valid pixels and the learning rate η = n/1000, n denotes the iteration number. The model was trained for 80,000 iterations, which took about 33 hours on a Nvidia Titan X. Following [4], we used online data augmentation to avoid over-fitting. Specifically, the data augmentation steps include rotation, scaling, color transformation and flips. We used the following standard metrics to evaluate our performance, where y i is the ground truth depth, ȳ i is the estimated depth value and N is the number of total pixels: 1 Root Mean Squared Error (rms): N i (ȳ i y i ) 2 1 ȳ Mean Absolute Relative Error (rel): i y i N i y i 1 Mean log10 Error (log10): N i log 10 ȳ i log 10 y i Threshold δ k : percentage of y i, s.t. max( ȳi y i, yi ȳ i ) < δ k, δ = 1.25 and k = 1, 2, 3. B. Model evaluation To demonstrate the benefits gained from the reference map construction, the network design and the refinement process, we conducted comparison experiments on NYUD2 against some variants of our proposed method. Table I illustrates the comparison results. Note that all variants listed in the table were implemented based on ResNet-50 with the same network capacity. Specifically, we first performed the monocular depth estimation using only RGB image as a baseline. Then the laser information was added to the input as the reference depth map ( Ref. ), without the residual of residual structure ( Res. of Res. ). Furthermore, we added the global identity skip to explicitly estimate the residual depth. Finally, the refinement was performed to refine the predicted depth of our residual of residual network. All network architectures were trained in two different loss function settings, the classification loss alone ( C ) or the combination of classification and regression ( C.+R. ). As can be seen from the table, By comparing the results in the first two rows with the followings, it can be seen that the performance is substantially promoted with our reference depth map as the additional input. It validates the effectiveness of constructing a dense reference map from the sparse partial observation as described in Section III-A, which redefines the depth estimation task as sculpting the depth from the reference. Comparison between the results with and without the Res. of Res. structure demonstrates the superiority by adding the global identity skip. As we explained in Section III-B, the ResNet is inherently suited to our partially observed task as we want to learn the residual depth, adding the global identity skip further preserves the exact physical concept of the residual, resulting in the boosts of the estimation performance. By comparing the performances with classification loss alone and with combination of classification and regression, it can be seen that the combination raises the performances in all model variants. It demonstrates the benefit of our loss design as introduced in Section III-C. The refinement introduced in Section III-D further brings slight improvement to the estimation accuracy. C. Comparison with the state-of-the-art In Table II, we compared with the state-of-the-art depth estimation methods using our best model suggested in Table I. We conducted experiments on both NYUD2 and KITTI to validate the generalization ability of the proposed method. Quantitative results in Table II illustrates that the depth estimation accuracy is substantially promoted by adding a single planar view of laser range data, validating our hypothesis of



![[5] usually has a bias due to the ambiguity of the global scale.](/docs-images/83/87289105/images/6-3.jpg "Best viewed in color. Image Ours Ground truth Fig. 5. Comparison on KITTI.")

















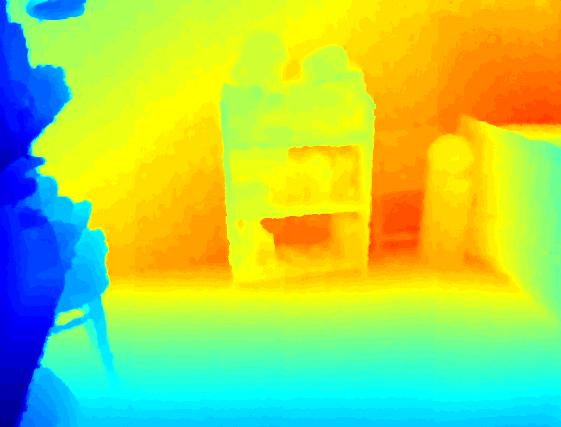
6 Image Eigen et al. Ours Image Ground truth Eigen et al. Ours Ground truth Fig. 4. Comparison on NYUD2. For each test image, the corresponding depth estimated by Eigen et al. [5], our method and the ground truth are given from left to right. Red denotes far and blue denotes close in the depth maps. It can be seen that the estimation of Eigen et al. [5] usually has a bias due to the ambiguity of the global scale. Best viewed in color. Image Ours Ground truth Fig. 5. Comparison on KITTI. For each test image, the corresponding depth estimated our method and the ground truth are given from left to right. Red denotes far and blue denotes close in the depth images, and missing values are denoted as dark red. The white circles demonstrate that missing depth value usually occurs due to the reflection when using the 3D laser range finder, while our method gives a reliable depth estimation. Best viewed in color. resolving the scale ambiguity with laser sensor information. It is to be noted that Cadena et al. [16] also tackled the depth estimation task with partially available depth. They proposed to reconstruct the dense depth from a sparse depth map with the unknown depth padded with a constant, while we formulate the partially observed estimation task as a residual learning task by constructing a dense reference map and achieves a considerable promotion. Corresponding qualitative comparisons are given in Figure 4 and Figure 5. For NYUD2, we compared with Eigen et al. [5] and the ground truth in Figure 4. As can be seen, taking the advantage of a single planar of laser data, our methods parse the scenes better with a more accurate estimation of the global scale. Figure 5 illustrates the comparison between our method and the ground truth obtained from the Velodyne laser range finder. Images and depth maps are cropped to show the region with laser observations. It is to be noted that the 3D laser range finder usually cannot observe valid depth values when scanning the windows of the cars, which might lead to unsafe predictions in the highlevel decision tasks. On the contrary, our method provides a relatively stable depth estimation regardless of the reflection. D. Analysis and potential usage To reveal the intrinsic impact of introducing the limited and sparse partial observation, we analyzed the depth estimation performances at different heights of the scene on NYUD2. Specifically, we generated a set of scans that are perpendicular to the gravity direction and sampled above the ground from 10cm to 210cm at equal distances. For all test images on NYUD2, the same evaluation metrics mentioned above were applied to evaluate on those individual scans. Figure 6 reveals the comparison between our monocular depth estimation results (second row in Table I) and our refined partially observed result (last row in Table I). It is to be noted that there is a minimum point in each error metric in Figure 6(a), 6(b), 6(c), and a corresponding maximum point in each accuracy metric in Figure 6(d), 6(e), 6(f). This is corresponding to the height of our laser scan (80cm), which demonstrates that the observed laser information is effectively preserved based on our residual of residual neural network. Furthermore, the partial observation not only increases the performance at the height of the 2D laser range finder, but also gives a considerable promotion to the performances of the overall scene. In addition, Figure 6 also indicates the possibility of further promotion by adding more
7 (a) rms (b) rel (c) log10 (d) δ 1 (e) δ 2 (f) δ 3 Fig. 6. Evaluation results at different heights. In each figure, the x-axis is the height in centimeter, and the y-axis is the evaluation metric. The blue line denotes the performance of the depth estimation with only RGB image, and the red line denotes the performance of the depth estimation with combination of the RGB image and a single line of laser range scan with height at 80cm. Best viewed in color. 2D laser range scans to the other heights. Figure 6 also demonstrates our method has a reliable root mean squared error below the heights of 80cm. This is particularly suited to the robotics applications. We demonstrate that our method has the potential for obstacle avoidance in Figure 7. Specifically, we parsed the geometry based on different methods for comparison. This includes the simulated 2D laser range finder, the estimated dense depth and the ground truth depth provided by the Kinect. Following the general method for obstacle avoidance based on point clouds, we projected each dense depth map to the 3D space, and then down-projected all the 3D points within the height (0, M] to the 2D plane to obtain the nearest obstacle in the scene. Here 0 is the height of the ground and M is a safe range that is usually set to be higher than the robot. We set M = 100cm in this example. The simulated laser range scan was also set to be perpendicular to the gravity direction, which can be directly presented in the 2D plane. For thorough comparison, we simulated two laser range finders at 20cm and 80cm above the ground plane respectively. Figure 7 demonstrates the images and the corresponding obstacle maps generated from different methods. As can be seen, the laser scanner set at 20cm fails to detect the upper stove and the seat of the chairs in Figure 7(a), 7(c) and 7(d), while the laser scanner set at 80cm misses the lower garbage bins as well as the seats in Figure 7(b), 7(c) and 7(d). These failure detections might lead to collision with the obstacles in practical applications, which suggests that it is challenging for reliable obstacle avoidance using a fixed 2D laser range finder due to its limited view, indicating the importance of understanding the 3D geometry. For depth estimation with only monocular images, there is usually a bias caused by the scale ambiguity. Our method relieve these problems by estimating the dense depth based on the 2D laser data, leading to a comprehensive depth estimation with higher reliability for obstacle avoidance. V. CONCLUSION This paper explores the monocular depth estimation task. By introducing sparse 2D laser range data into the depth estimation task, our method effectively alleviates the global scale ambiguity and produces a more reliable estimation result. We redefined the depth estimation task as a residual learning problem by constructing a dense reference map from the sparse laser range data. It was implemented with our residual of residual network, and the classification and regression losses are combined for more effective estimation. We conducted experiments on both indoor and outdoor datasets including NYUD2 and KITTI. The performance was compared with state-of-the-art techniques and our method shows superior results on both datasets, validating the effectiveness of the proposed method. Furthermore, it suggests a promising direction to use sparse laser data to guide dense depth estimation using learning methods. REFERENCES [1] N. Silberman, D. Hoiem, P. Kohli, and R. Fergus, Indoor segmentation and support inference from rgbd images, in European Conference on Computer Vision, pp , Springer, [2] Y. Liao, S. Kodagoda, Y. Wang, L. Shi, and Y. Liu, Understand scene categories by objects: A semantic regularized scene classifier using convolutional neural networks, in 2016 IEEE International Conference on Robotics and Automation (ICRA), pp , IEEE, [3] Y. Wang, S. Huang, R. Xiong, and J. Wu, A framework for multisession rgbd slam in low dynamic workspace environment, CAAI Transactions on Intelligence Technology, [4] D. Eigen, C. Puhrsch, and R. Fergus, Depth map prediction from a single image using a multi-scale deep network, in Advances in neural information processing systems, pp , [5] D. Eigen and R. Fergus, Predicting depth, surface normals and semantic labels with a common multi-scale convolutional architecture, in Proceedings of the IEEE International Conference on Computer Vision, pp , [6] F. Liu, C. Shen, G. Lin, and I. Reid, Learning depth from single monocular images using deep convolutional neural fields., IEEE transactions on pattern analysis and machine intelligence, [7] I. Laina, C. Rupprecht, V. Belagiannis, F. Tombari, and N. Navab, Deeper depth prediction with fully convolutional residual networks, arxiv preprint arxiv: , [8] Y. Cao, Z. Wu, and C. Shen, Estimating depth from monocular images as classification using deep fully convolutional residual networks, arxiv preprint arxiv: , [9] A. Cherubini, F. Spindler, and F. Chaumette, Autonomous visual navigation and laser-based moving obstacle avoidance, IEEE Transactions on Intelligent Transportation Systems, vol. 15, no. 5, pp , [10] Y. Liao, S. Kodagoda, Y. Wang, L. Shi, and Y. Liu, Place classification with a graph regularized deep neural network, IEEE Transactions on Cognitive and Developmental Systems, [11] A. Saxena, S. H. Chung, and A. Y. Ng, Learning depth from single monocular images, in Advances in Neural Information Processing Systems, pp , [12] A. Saxena, M. Sun, and A. Y. Ng, Make3d: Learning 3d scene structure from a single still image, IEEE transactions on pattern analysis and machine intelligence, vol. 31, no. 5, pp , [13] K. He, X. Zhang, S. Ren, and J. Sun, Deep residual learning for image recognition, 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [14] A. Harrison and P. Newman, Image and sparse laser fusion for dense scene reconstruction, in Field and Service Robotics, pp , Springer, 2010.

![The second row demonstrates the corresponding obstacle maps in the two-dimensional space, with the gravity direction eliminated. Best viewed in color. [15] P. Pinie s, L. M.](/docs-images/83/87289105/images/8-2.jpg "Paz, and P.")

![Robotics: Science and Systems, 2016. [17] H. Badino, U. Franke, and D.](/docs-images/83/87289105/images/8-4.jpg "Pfeiffer, The stixel world-a compact medium level representation of the 3d-world, in Joint Pattern Recognition Symposium, pp. 51 60, Springer, 2009. [18] A. Geiger, P.")
![Lenz, and R. Urtasun, Are we ready for autonomous driving? the kitti vision benchmark suite, in Conference on Computer Vision and Pattern Recognition (CVPR), 2012. [19] S.](/docs-images/83/87289105/images/8-5.jpg "Gupta, P. Arbelaez, and J.")
8 (a) (b) (c) (d) Fig. 7. Illustration of obstacle avoidance. The first row shows the image with the projected laser scan. The height of the laser is set at 20cm to simulate the real situation. The second row demonstrates the corresponding obstacle maps in the two-dimensional space, with the gravity direction eliminated. Best viewed in color. [15] P. Pinie s, L. M. Paz, and P. Newman, Too much tv is bad: Dense reconstruction from sparse laser with non-convex regularisation, in 2015 IEEE International Conference on Robotics and Automation (ICRA), pp , IEEE, [16] C. Cadena, A. Dick, and I. Reid, Multi-modal auto-encoders as joint estimators for robotics scene understanding, in Proc. Robotics: Science and Systems, [17] H. Badino, U. Franke, and D. Pfeiffer, The stixel world-a compact medium level representation of the 3d-world, in Joint Pattern Recognition Symposium, pp , Springer, [18] A. Geiger, P. Lenz, and R. Urtasun, Are we ready for autonomous driving? the kitti vision benchmark suite, in Conference on Computer Vision and Pattern Recognition (CVPR), [19] S. Gupta, P. Arbelaez, and J. Malik, Perceptual organization and recognition of indoor scenes from rgb-d images, in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp , [20] Y. Jia, E. Shelhamer, J. Donahue, S. Karayev, J. Long, R. Girshick, S. Guadarrama, and T. Darrell, Caffe: Convolutional architecture for fast feature embedding, arxiv preprint arxiv: , [21] M. Mancini, G. Costante, P. Valigi, and T. A. Ciarfuglia, Fast robust monocular depth estimation for obstacle detection with fully convolutional networks, arxiv preprint arxiv: , 2016.
9 TABLE I MODEL EVALUATION ON NYUD2. Input Res. of Res. Loss Refined Error (lower is better) Accuracy (higher is better) rms rel log10 δ 1 δ 2 δ 3 RGB C RGB C.+R RGB + Ref. No C RGB + Ref. No C.+R RGB + Ref. Yes C. No RGB + Ref. Yes C.+R. No RGB + Ref. Yes C.+R. Yes TABLE II COMPARISON WITH THE STATE-OF-THE-ART ON NYUD2 AND KITTI. Dataset NYUD2 KITTI Method Error (lower is better) Accuracy (higher is better) rms rel log10 δ 1 δ 2 δ 3 Liu et al. [6] Eigen et al. [4] Eigen et al. [5] Cao et al. [8] Laina et al. [7] Ours Saxena et al. [12] Eigen et al. [4] Mancini et al. [21] Cadena et al. [16] Ours
Fully Convolutional Network for Depth Estimation and Semantic Segmentation
 Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation
 AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Joint Object Detection and Viewpoint Estimation using CNN features
 Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol cguindel@ing.uc3m.es Intelligent Systems Laboratory Universidad Carlos III de Madrid
arxiv: v2 [cs.ro] 26 Feb 2018
![arxiv: v2 [cs.ro] 26 Feb 2018](/thumbs/81/83191831.jpg "arxiv: v2 [cs.ro] 26 Feb 2018") Sparse-to-Dense: Depth Prediction from Sparse Depth Samples and a Single Image Fangchang Ma 1 and Sertac Karaman 1 arxiv:179.7492v2 [cs.ro] 26 Feb 218 Abstract We consider the problem of dense depth prediction
Sparse-to-Dense: Depth Prediction from Sparse Depth Samples and a Single Image Fangchang Ma 1 and Sertac Karaman 1 arxiv:179.7492v2 [cs.ro] 26 Feb 218 Abstract We consider the problem of dense depth prediction
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Depth Estimation from Single Image Using CNN-Residual Network
 Depth Estimation from Single Image Using CNN-Residual Network Xiaobai Ma maxiaoba@stanford.edu Zhenglin Geng zhenglin@stanford.edu Zhi Bie zhib@stanford.edu Abstract In this project, we tackle the problem
Depth Estimation from Single Image Using CNN-Residual Network Xiaobai Ma maxiaoba@stanford.edu Zhenglin Geng zhenglin@stanford.edu Zhi Bie zhib@stanford.edu Abstract In this project, we tackle the problem
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Optimizing Monocular Cues for Depth Estimation from Indoor Images
 Optimizing Monocular Cues for Depth Estimation from Indoor Images Aditya Venkatraman 1, Sheetal Mahadik 2 1, 2 Department of Electronics and Telecommunication, ST Francis Institute of Technology, Mumbai,
Optimizing Monocular Cues for Depth Estimation from Indoor Images Aditya Venkatraman 1, Sheetal Mahadik 2 1, 2 Department of Electronics and Telecommunication, ST Francis Institute of Technology, Mumbai,
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Learning Depth from Single Images with Deep Neural Network Embedding Focal Length
 Learning Depth from Single Images with Deep Neural Network Embedding Focal Length Lei He, Guanghui Wang (Senior Member, IEEE) and Zhanyi Hu arxiv:1803.10039v1 [cs.cv] 27 Mar 2018 Abstract Learning depth
Learning Depth from Single Images with Deep Neural Network Embedding Focal Length Lei He, Guanghui Wang (Senior Member, IEEE) and Zhanyi Hu arxiv:1803.10039v1 [cs.cv] 27 Mar 2018 Abstract Learning depth
Learning visual odometry with a convolutional network
 Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
arxiv: v1 [cs.cv] 29 Mar 2018
![arxiv: v1 [cs.cv] 29 Mar 2018](/thumbs/77/76324907.jpg "arxiv: v1 [cs.cv] 29 Mar 2018") Structured Attention Guided Convolutional Neural Fields for Monocular Depth Estimation Dan Xu, Wei Wang, Hao Tang, Hong Liu 2, Nicu Sebe, Elisa Ricci,3 Multimedia and Human Understanding Group, University
Structured Attention Guided Convolutional Neural Fields for Monocular Depth Estimation Dan Xu, Wei Wang, Hao Tang, Hong Liu 2, Nicu Sebe, Elisa Ricci,3 Multimedia and Human Understanding Group, University
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
Learning with Side Information through Modality Hallucination
 Master Seminar Report for Recent Trends in 3D Computer Vision Learning with Side Information through Modality Hallucination Judy Hoffman, Saurabh Gupta, Trevor Darrell. CVPR 2016 Nan Yang Supervisor: Benjamin
Master Seminar Report for Recent Trends in 3D Computer Vision Learning with Side Information through Modality Hallucination Judy Hoffman, Saurabh Gupta, Trevor Darrell. CVPR 2016 Nan Yang Supervisor: Benjamin
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Depth Estimation from a Single Image Using a Deep Neural Network Milestone Report
 Figure 1: The architecture of the convolutional network. Input: a single view image; Output: a depth map. 3 Related Work In [4] they used depth maps of indoor scenes produced by a Microsoft Kinect to successfully
Figure 1: The architecture of the convolutional network. Input: a single view image; Output: a depth map. 3 Related Work In [4] they used depth maps of indoor scenes produced by a Microsoft Kinect to successfully
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
DEPT: Depth Estimation by Parameter Transfer for Single Still Images
 DEPT: Depth Estimation by Parameter Transfer for Single Still Images Xiu Li 1, 2, Hongwei Qin 1,2, Yangang Wang 3, Yongbing Zhang 1,2, and Qionghai Dai 1 1. Dept. of Automation, Tsinghua University 2.
DEPT: Depth Estimation by Parameter Transfer for Single Still Images Xiu Li 1, 2, Hongwei Qin 1,2, Yangang Wang 3, Yongbing Zhang 1,2, and Qionghai Dai 1 1. Dept. of Automation, Tsinghua University 2.
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015
 CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
Non-flat Road Detection Based on A Local Descriptor
 Non-flat Road Detection Based on A Local Descriptor Kangru Wang, Lei Qu, Lili Chen, Yuzhang Gu, Xiaolin Zhang Abstrct The detection of road surface and free space remains challenging for non-flat plane,
Non-flat Road Detection Based on A Local Descriptor Kangru Wang, Lei Qu, Lili Chen, Yuzhang Gu, Xiaolin Zhang Abstrct The detection of road surface and free space remains challenging for non-flat plane,
Mapping with Dynamic-Object Probabilities Calculated from Single 3D Range Scans
 Mapping with Dynamic-Object Probabilities Calculated from Single 3D Range Scans Philipp Ruchti Wolfram Burgard Abstract Various autonomous robotic systems require maps for robust and safe navigation. Particularly
Mapping with Dynamic-Object Probabilities Calculated from Single 3D Range Scans Philipp Ruchti Wolfram Burgard Abstract Various autonomous robotic systems require maps for robust and safe navigation. Particularly
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Pose estimation using a variety of techniques
 Pose estimation using a variety of techniques Keegan Go Stanford University keegango@stanford.edu Abstract Vision is an integral part robotic systems a component that is needed for robots to interact robustly
Pose estimation using a variety of techniques Keegan Go Stanford University keegango@stanford.edu Abstract Vision is an integral part robotic systems a component that is needed for robots to interact robustly
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
LSTM and its variants for visual recognition. Xiaodan Liang Sun Yat-sen University
 LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
Learning to Match. Jun Xu, Zhengdong Lu, Tianqi Chen, Hang Li
 Learning to Match Jun Xu, Zhengdong Lu, Tianqi Chen, Hang Li 1. Introduction The main tasks in many applications can be formalized as matching between heterogeneous objects, including search, recommendation,
Learning to Match Jun Xu, Zhengdong Lu, Tianqi Chen, Hang Li 1. Introduction The main tasks in many applications can be formalized as matching between heterogeneous objects, including search, recommendation,
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization
 Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material
 Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
Ryerson University CP8208. Soft Computing and Machine Intelligence. Naive Road-Detection using CNNS. Authors: Sarah Asiri - Domenic Curro
 Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Ryerson University CP8208 Soft Computing and Machine Intelligence Naive Road-Detection using CNNS Authors: Sarah Asiri - Domenic Curro April 24 2016 Contents 1 Abstract 2 2 Introduction 2 3 Motivation
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Indoor Object Recognition of 3D Kinect Dataset with RNNs
 Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION
 2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Supplementary: Cross-modal Deep Variational Hand Pose Estimation
 Supplementary: Cross-modal Deep Variational Hand Pose Estimation Adrian Spurr, Jie Song, Seonwook Park, Otmar Hilliges ETH Zurich {spurra,jsong,spark,otmarh}@inf.ethz.ch Encoder/Decoder Linear(512) Table
Supplementary: Cross-modal Deep Variational Hand Pose Estimation Adrian Spurr, Jie Song, Seonwook Park, Otmar Hilliges ETH Zurich {spurra,jsong,spark,otmarh}@inf.ethz.ch Encoder/Decoder Linear(512) Table
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Classifying a specific image region using convolutional nets with an ROI mask as input
 Classifying a specific image region using convolutional nets with an ROI mask as input 1 Sagi Eppel Abstract Convolutional neural nets (CNN) are the leading computer vision method for classifying images.
Classifying a specific image region using convolutional nets with an ROI mask as input 1 Sagi Eppel Abstract Convolutional neural nets (CNN) are the leading computer vision method for classifying images.
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image. Supplementary Material
 Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues
 2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
Feature-Fused SSD: Fast Detection for Small Objects
 Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document
 Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document Franziska Mueller 1,2 Dushyant Mehta 1,2 Oleksandr Sotnychenko 1 Srinath Sridhar 1 Dan Casas 3 Christian Theobalt
Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document Franziska Mueller 1,2 Dushyant Mehta 1,2 Oleksandr Sotnychenko 1 Srinath Sridhar 1 Dan Casas 3 Christian Theobalt
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Inception Network Overview. David White CS793
 Inception Network Overview David White CS793 So, Leonardo DiCaprio dreams about dreaming... https://m.media-amazon.com/images/m/mv5bmjaxmzy3njcxnf5bml5banbnxkftztcwnti5otm0mw@@._v1_sy1000_cr0,0,675,1 000_AL_.jpg
Inception Network Overview David White CS793 So, Leonardo DiCaprio dreams about dreaming... https://m.media-amazon.com/images/m/mv5bmjaxmzy3njcxnf5bml5banbnxkftztcwnti5otm0mw@@._v1_sy1000_cr0,0,675,1 000_AL_.jpg
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Convolution Neural Networks for Chinese Handwriting Recognition
 Convolution Neural Networks for Chinese Handwriting Recognition Xu Chen Stanford University 450 Serra Mall, Stanford, CA 94305 xchen91@stanford.edu Abstract Convolutional neural networks have been proven
Convolution Neural Networks for Chinese Handwriting Recognition Xu Chen Stanford University 450 Serra Mall, Stanford, CA 94305 xchen91@stanford.edu Abstract Convolutional neural networks have been proven
arxiv: v2 [cs.cv] 14 May 2018
![arxiv: v2 [cs.cv] 14 May 2018](/thumbs/79/79495201.jpg "arxiv: v2 [cs.cv] 14 May 2018") ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
ContextVP: Fully Context-Aware Video Prediction Wonmin Byeon 1234, Qin Wang 1, Rupesh Kumar Srivastava 3, and Petros Koumoutsakos 1 arxiv:1710.08518v2 [cs.cv] 14 May 2018 Abstract Video prediction models
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Ground Plane Detection with a Local Descriptor
 Ground Plane Detection with a Local Descriptor Kangru Wang, Lei Qu, Lili Chen, Yuzhang Gu, Dongchen Zhu, Xiaolin Zhang Shanghai Institute of Microsystem and Information Technology (SIMIT), Chinese Academy
Ground Plane Detection with a Local Descriptor Kangru Wang, Lei Qu, Lili Chen, Yuzhang Gu, Dongchen Zhu, Xiaolin Zhang Shanghai Institute of Microsystem and Information Technology (SIMIT), Chinese Academy
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models
 One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
International Journal of Computer Engineering and Applications, Volume XII, Special Issue, September 18,
 REAL-TIME OBJECT DETECTION WITH CONVOLUTION NEURAL NETWORK USING KERAS Asmita Goswami [1], Lokesh Soni [2 ] Department of Information Technology [1] Jaipur Engineering College and Research Center Jaipur[2]
REAL-TIME OBJECT DETECTION WITH CONVOLUTION NEURAL NETWORK USING KERAS Asmita Goswami [1], Lokesh Soni [2 ] Department of Information Technology [1] Jaipur Engineering College and Research Center Jaipur[2]
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
RSRN: Rich Side-output Residual Network for Medial Axis Detection
 RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
An efficient face recognition algorithm based on multi-kernel regularization learning
 Acta Technica 61, No. 4A/2016, 75 84 c 2017 Institute of Thermomechanics CAS, v.v.i. An efficient face recognition algorithm based on multi-kernel regularization learning Bi Rongrong 1 Abstract. A novel
Acta Technica 61, No. 4A/2016, 75 84 c 2017 Institute of Thermomechanics CAS, v.v.i. An efficient face recognition algorithm based on multi-kernel regularization learning Bi Rongrong 1 Abstract. A novel
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
On-line and Off-line 3D Reconstruction for Crisis Management Applications
 On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
DEPT: Depth Estimation by Parameter Transfer for Single Still Images
 DEPT: Depth Estimation by Parameter Transfer for Single Still Images Xiu Li 1,2, Hongwei Qin 1,2(B), Yangang Wang 3, Yongbing Zhang 1,2, and Qionghai Dai 1 1 Department of Automation, Tsinghua University,
DEPT: Depth Estimation by Parameter Transfer for Single Still Images Xiu Li 1,2, Hongwei Qin 1,2(B), Yangang Wang 3, Yongbing Zhang 1,2, and Qionghai Dai 1 1 Department of Automation, Tsinghua University,
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material
 Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Real-Time Depth Estimation from 2D Images
 Real-Time Depth Estimation from 2D Images Jack Zhu Ralph Ma jackzhu@stanford.edu ralphma@stanford.edu. Abstract ages. We explore the differences in training on an untrained network, and on a network pre-trained
Real-Time Depth Estimation from 2D Images Jack Zhu Ralph Ma jackzhu@stanford.edu ralphma@stanford.edu. Abstract ages. We explore the differences in training on an untrained network, and on a network pre-trained
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot
 Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot Yoichi Nakaguro Sirindhorn International Institute of Technology, Thammasat University P.O. Box 22, Thammasat-Rangsit Post Office,
Canny Edge Based Self-localization of a RoboCup Middle-sized League Robot Yoichi Nakaguro Sirindhorn International Institute of Technology, Thammasat University P.O. Box 22, Thammasat-Rangsit Post Office,
/10/$ IEEE 4048
 21 IEEE International onference on Robotics and Automation Anchorage onvention District May 3-8, 21, Anchorage, Alaska, USA 978-1-4244-54-4/1/$26. 21 IEEE 448 Fig. 2: Example keyframes of the teabox object.
21 IEEE International onference on Robotics and Automation Anchorage onvention District May 3-8, 21, Anchorage, Alaska, USA 978-1-4244-54-4/1/$26. 21 IEEE 448 Fig. 2: Example keyframes of the teabox object.
arxiv: v1 [cs.cv] 14 Dec 2016
![arxiv: v1 [cs.cv] 14 Dec 2016](/thumbs/88/115095109.jpg "arxiv: v1 [cs.cv] 14 Dec 2016") Detect, Replace, Refine: Deep Structured Prediction For Pixel Wise Labeling arxiv:1612.04770v1 [cs.cv] 14 Dec 2016 Spyros Gidaris University Paris-Est, LIGM Ecole des Ponts ParisTech spyros.gidaris@imagine.enpc.fr
Detect, Replace, Refine: Deep Structured Prediction For Pixel Wise Labeling arxiv:1612.04770v1 [cs.cv] 14 Dec 2016 Spyros Gidaris University Paris-Est, LIGM Ecole des Ponts ParisTech spyros.gidaris@imagine.enpc.fr
Visual Perception for Robots
 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Enabling a Robot to Open Doors Andrei Iancu, Ellen Klingbeil, Justin Pearson Stanford University - CS Fall 2007
 Enabling a Robot to Open Doors Andrei Iancu, Ellen Klingbeil, Justin Pearson Stanford University - CS 229 - Fall 2007 I. Introduction The area of robotic exploration is a field of growing interest and
Enabling a Robot to Open Doors Andrei Iancu, Ellen Klingbeil, Justin Pearson Stanford University - CS 229 - Fall 2007 I. Introduction The area of robotic exploration is a field of growing interest and