Automatic 3-D 3 D Model Acquisition from Range Images. Michael K. Reed and Peter K. Allen Computer Science Department Columbia University
|
|
|
- Beatrix Hoover
- 5 years ago
- Views:
Transcription
1 Automatic 3-D 3 D Model Acquisition from Range Images Michael K. Reed and Peter K. Allen Computer Science Department Columbia University
2 Introduction Objective: given an arbitrary object or scene, construct a representative CAD model Method: rangefinding sensor solid modeling view planning
3 Motivation: Applications Virtual environment generation acquire model for use in VRML, entertainment, etc Reverse engineering acquiring a model from a part copying/modification Part inspection compare acquired model to acceptable model 3D FAX transmit acquired model to remote RP machine Architectural site modeling
4 Talk Outline Introduction, motivation, & background Solid modeling of range images Sensor viewpoint planning Conclusions & future research
5 An Introduction to a Solution How do people solve this problem? An algorithm: Acquire data from viewpoint Model data (one viewpoint) Integrate with previous model Plan next view no Done? yes
6 Previous Work Computer Vision: oriented towards recognition task Computer Graphics: oriented towards recovery task [Dickenson et al. 1994] [Wu & Levine 1994] [Thompson et al. 1996] [Hoppe 1994] [Fua 1992] [Connolly 1989] [Tarbox & Gottshlich 1995] meshes & zippering: [Turk 1994] [Rutishauser 94] meshes & iso-surface extraction: [Curless 1996]
7 Previous Work: Issues Final model is not closed Single object only Shape and topological restrictions Assumed complete surface sampling No modeling of scene occlusion
8 Modeling Desiderata no topological constraints on object / scene resulting model is watertight incremental model improvement model acquisition in few views ability to support sensor viewpoint planning Our method attempts to deal with each of these issues

9 Modeling with Mesh Surfaces Advantages: able to accurately model many shapes effective at varying resolutions simple!

10 Modeling with Mesh Surfaces Integration: find overlap between 2 meshes clip & retriangulate
11 Modeling with Mesh Surfaces Issues: not closed until surface is completely imaged no representation of space occluded from sensor integration of non-manifold surfaces not welldefined Our solution: use mesh surface & volume! build solid model from each range image represent both imaged surface & occluded volume integrate using set intersection
12 Sensor Model Rangefinder acts as point light source in plane Motion of rangefinder is linear, perpendicular to scanning plane
13 Sensor Imaging Characteristics Range image: rectangular sampling Image has structure: surface elements occlusion elements

, m")
14 Constructing the Solid Sweep mesh surface M to form a solid S by: S = U extrude ( m ), m M m
15 Surface Type Attributes Surfaces in the model are tagged: imaged for those directly imaged by the sensor occlusion for those due to scene occlusion occlusion imaged
16 Merging Models from Different Views Each model is a solid, therefore we may use regularized set intersection to integrate: initialize composite model to the entire workspace acquire a new solid model update the composite model by set intersection with new model Assumption: the set described by each model must be a superset of the actual imaged object

17 Experimental Setup Sensor: Servo-Robot laser rangefinder Motion: IBM 7575 SCARA robot and turntable
18 Movie!!! cvpr.lnk


19 Example: Hip Replacement

20 Example: Hip Replacement

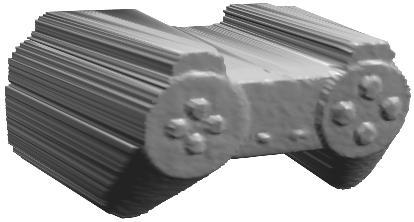
21 Example: Video Game Controller

22 Example: Video Game Controller

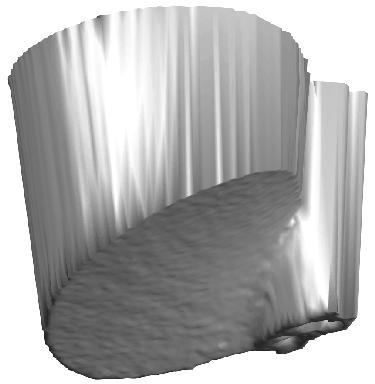
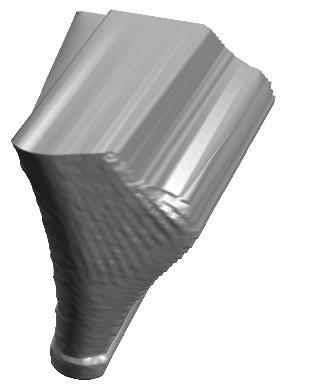
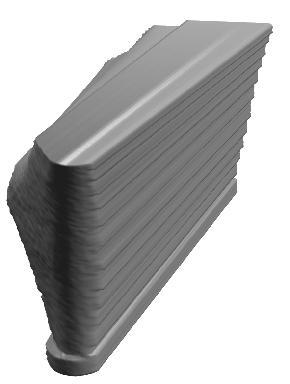
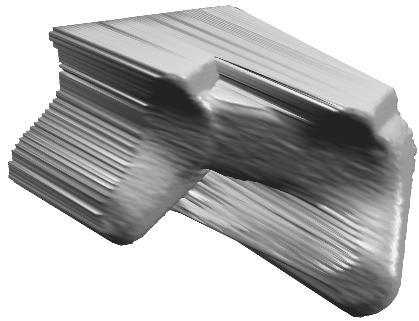
23 Example: Propeller Blade

24 Example: Propeller Blade


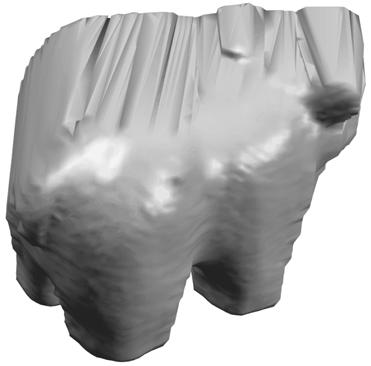
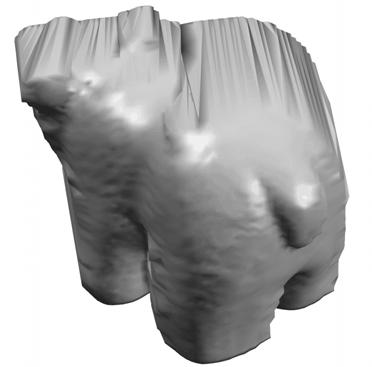
25 Example: Toy Bear in 4 Views


26 Example: Toy Bear in 4 Views
27 Effects of Sampling on Integration Violation of sampling theorem: mesh elements do not necessarily correspond to object surfaces! Background Object Rangefinder

28 Effects of Sampling on Integration Surfaces requiring dilation may be identified by their surface type attribute


29 Effects of Sampling on Integration Results: without dilation with dilation
30 Integration of View Planning Why plan sensor viewpoints? To ensure adequate model acquisition To reduce the number of sensing operations How does one determine the next view? Must represent what has not been sensed Must determine a viewpoint that will improve model
31 Previous Work: Planning in unknown environments [Connolly 1989] [Maver & Bajcsy 1990] [Whaite & Ferrie 1992] [Kutulakos 1994] [Pito 1997] Planning in known environments [Sedas-Gersey 1993] [Abrams 1997] [Tarabanis et al. 1995]
32 Strategy in Viewpoint Planning At what point should planning be done? at the outset? after some intial model? never? area of "occlusion" surface # of views ->
33 Integration of View Planning Caveats for methods in unknown environs: scene self-occlusion not considered use brute -force raycasting discrete solutions only Our approach: acquire preliminary model first, then plan plan to acquire occlusion surfaces (targets) apply static sensor planning methods solutions (plans) are in continuous space
34 Sensor Viewpoint Planning Our approach: target driven - computes visibility for target using the composite model operates in continuous space - solutions are 3-D volumes targets are selected from model surfaces labeled occlusion
35 Viewpoint Planning: Method Determine constraints on sensor position sensor imaging constraints model occlusion constraints sensor placement constraints Integrate constraints to form plan Discretize as final step (if necessary)


36 Sensor Imaging Constraints Describe limits of sensor s ability to acquire data rangefinder example: breakdown angle α, standoff:
37 Model Occlusion Constraints Describe space occluded from target Must be calculated for all occluding model surfaces! occlusion constraint volume occluding surface target surface

38 Sensor Placement Constraints Describe workspace positions available to sensor Usually a function of manipulator type
39 Constraint Integration Constraints are represented using solid modeling primitives Plan is calculated by: (imaging constraints - occlusion constraints) placement constraints
40 Planning Example Target is green, other model surfaces in red:
41 Planning Example Compute sensor imaging constraint:
42 Planning Example Compute model occlusion constraints:

43 Planning Example Compute visibility volume
44 Planning Example Compute sensor placement constraint:
45 Planning Example Intersect placement constraint with visibility volume:
46 Planning Example Discretize sensor space and test for inclusion:


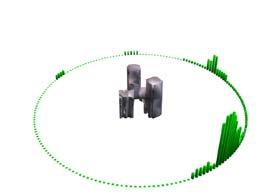
47 Example of View Planning: Strut Target: Occluded Surface of Max. Area

48 Example of View Planning: Strut

49 Example of View Planning: Strut

50 Strut: Final Model
51 Considering Multiple Targets

52 Including Sensor Placement Constraints

53 Example: Model City 3 buildings with very high occlusion:


54 City Model: After 4 Views

55 City Model: Target Visibility for 30 Largest Occluded Surfaces by Area

56 City Model: Placement Constraint



57 City Model: Total Plan
58 City Model: Final Reconstruction


59 City Model: Texture Mapped
60 City Model: Analysis View Volume Surface Area Occ. Area Plan Area % Planned % % % % % % % %
61 Efficiency Considerations Modeling restricted set union mesh sweep operation problem subdivision is set union Planning: target surface decimation occlusion constraints calculated only for model surfaces within imaging constraints volume
62 City Model: Analysis
63 Limitations Requires surrounding views No consideration of overlapping sampling in distinct images Planning does not consider partial visibility Requires a calibrated system
64 Conclusion The system presented has the following attributes: is incremental uses hybrid of both mesh and volume representations represents both imaged and unimaged surfaces for planning the next view determines a solid model at each step
65 Future Research Outdoor Scene Modeling Reduce number of full-model intersections subtraction for some modeling operations extension to other environments Optimal viewpoint and target selection partial visibility Reduction of model to canonical form use symmetry, features, heuristics consider common design principles

66 Range Scanning Outdoor Structures

67 Mesh Surface

68 Scan of Rodin s The Thinker

69 MOBILE ROBOT FOR SITE MODELING Outdoor Mobile Base Centimeter accuracy GPS system Omni-directional 360º Color Camera 80 meter laser scanner Integrated sonar units Wireless ethernet connection
3-D Modeling from Range Imagery: An Incremental Method with a Planning Component
 Image and Vision Computing 17 (1999) 99 111 3-D Modeling from Range Imagery: An Incremental Method with a Planning Component Michael K. Reed, Peter K. Allen* Computer Science Department, Columbia University,
Image and Vision Computing 17 (1999) 99 111 3-D Modeling from Range Imagery: An Incremental Method with a Planning Component Michael K. Reed, Peter K. Allen* Computer Science Department, Columbia University,
View Planning for Automated Site Modeling
 View Planning for Automated Site Modeling Paul S. Blaer and Peter K. Allen Department of Computer Science, Columbia University {pblaer,allen}@cs.columbia.edu Abstract We present a systematic method for
View Planning for Automated Site Modeling Paul S. Blaer and Peter K. Allen Department of Computer Science, Columbia University {pblaer,allen}@cs.columbia.edu Abstract We present a systematic method for
A Two-Stage Algorithm for Planning the Next View From Range Images
 A Two-Stage Algorithm for Planning the Next View From Range Images Miguel Angel García, Department of Computer Science Engineering Rovira i Virgili University Ctra. Salou s/n. 43006 Tarragona, Spain magarcia@etse.urv.es
A Two-Stage Algorithm for Planning the Next View From Range Images Miguel Angel García, Department of Computer Science Engineering Rovira i Virgili University Ctra. Salou s/n. 43006 Tarragona, Spain magarcia@etse.urv.es
Unwrapping of Urban Surface Models
 Unwrapping of Urban Surface Models Generation of virtual city models using laser altimetry and 2D GIS Abstract In this paper we present an approach for the geometric reconstruction of urban areas. It is
Unwrapping of Urban Surface Models Generation of virtual city models using laser altimetry and 2D GIS Abstract In this paper we present an approach for the geometric reconstruction of urban areas. It is
CSc Topics in Computer Graphics 3D Photography
 CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Generating 3D Meshes from Range Data
 Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Ruigang Yang and Peter K. Allen Department of Computer Science, Columbia University, New York, NY *
 Proceedings of the 1998 IEEE International Conference on Robotics & Automation Leuven, Belgium May 1998 Registering, Integrating, and Building CAD Models from Range Data Ruigang Yang and Peter K. Allen
Proceedings of the 1998 IEEE International Conference on Robotics & Automation Leuven, Belgium May 1998 Registering, Integrating, and Building CAD Models from Range Data Ruigang Yang and Peter K. Allen
Integrated View and Path Planning for an Autonomous six-dof Eye-in-hand Object Modeling System
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Integrated View and Path Planning for an Autonomous six-dof Eye-in-hand Object Modeling
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Integrated View and Path Planning for an Autonomous six-dof Eye-in-hand Object Modeling
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
A Solution to the Next Best View Problem for Automated Surface Acquisition
 1016 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 21, NO. 10, OCTOBER 1999 A Solution to the Next Best View Problem for Automated Surface Acquisition Richard Pito, Member, IEEE
1016 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 21, NO. 10, OCTOBER 1999 A Solution to the Next Best View Problem for Automated Surface Acquisition Richard Pito, Member, IEEE
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
A Best Next View selection algorithm incorporating a quality criterion
 A Best Next View selection algorithm incorporating a quality criterion Nikolaos A. Massios, Robert B. Fisher, Intelligent Autonomous Systems, Department of Artificial Intelligence, University of Amsterdam,
A Best Next View selection algorithm incorporating a quality criterion Nikolaos A. Massios, Robert B. Fisher, Intelligent Autonomous Systems, Department of Artificial Intelligence, University of Amsterdam,
coding of various parts showing different features, the possibility of rotation or of hiding covering parts of the object's surface to gain an insight
 Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
3D Object Representation. Michael Kazhdan ( /657)
") 3D Object Representation Michael Kazhdan (601.457/657) 3D Objects How can this object be represented in a computer? 3D Objects This one? H&B Figure 10.46 3D Objects This one? H&B Figure 9.9 3D Objects
3D Object Representation Michael Kazhdan (601.457/657) 3D Objects How can this object be represented in a computer? 3D Objects This one? H&B Figure 10.46 3D Objects This one? H&B Figure 9.9 3D Objects
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS
 DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS Tsunetake Kanatani,, Hideyuki Kume, Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Hyogo Prefectural
DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS Tsunetake Kanatani,, Hideyuki Kume, Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Hyogo Prefectural
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Free-form 3D object reconstruction from range images. C. Schütz, T. Jost, H. Hügli
 Free-form 3D object reconstruction from range images C. Schütz, T. Jost, H. Hügli Institute for Microtechnology University of Neuchatel, rue Breguet 2 CH-2000 Neuchatel, Switzerland email: christian.schutz@imt.unine.ch
Free-form 3D object reconstruction from range images C. Schütz, T. Jost, H. Hügli Institute for Microtechnology University of Neuchatel, rue Breguet 2 CH-2000 Neuchatel, Switzerland email: christian.schutz@imt.unine.ch
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Data Acquisition and View Planning for 3-D Modeling Tasks
 Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 TuB4.1 Data Acquisition and View Planning for 3-D Modeling Tasks Paul
Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 TuB4.1 Data Acquisition and View Planning for 3-D Modeling Tasks Paul
A 3-D Scanner Capturing Range and Color for the Robotics Applications
 J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
Ioannis Stamos and P eter K. Allen, Colum bia University,fistamos, acquisition, segmentation, volumetric modeling, viewpoint
 3 D Model Construction Using Range and Image Data Λ Ioannis Stamos and P eter K. Allen, Colum bia University,fistamos, alleng@cs.columbia.edu Abstract This paper deals with the automated creation of geometric
3 D Model Construction Using Range and Image Data Λ Ioannis Stamos and P eter K. Allen, Colum bia University,fistamos, alleng@cs.columbia.edu Abstract This paper deals with the automated creation of geometric
HOW TO RECONSTRUCT DAMAGED PARTS BASED ON PRECISE AND (PARTLY-)AUTOMATISED SCAN METHODS
AUTOMATISED SCAN METHODS") HOW TO RECONSTRUCT DAMAGED PARTS BASED ON PRECISE AND (PARTLY-)AUTOMATISED SCAN METHODS cirp GmbH 3D models features spare part identification load simulation mesh repair search in data bases machine learning
HOW TO RECONSTRUCT DAMAGED PARTS BASED ON PRECISE AND (PARTLY-)AUTOMATISED SCAN METHODS cirp GmbH 3D models features spare part identification load simulation mesh repair search in data bases machine learning
Ceilbot vision and mapping system
 Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Dedicated Software Algorithms for 3D Clouds of Points
 Dedicated Software Algorithms for 3D Clouds of Points Introduction AQSENSE develops and commercializes 3D image acquisition and processing technologies that allow high speed in-line 100% production inspection,
Dedicated Software Algorithms for 3D Clouds of Points Introduction AQSENSE develops and commercializes 3D image acquisition and processing technologies that allow high speed in-line 100% production inspection,
Some Thoughts on Visibility
 Some Thoughts on Visibility Frédo Durand MIT Lab for Computer Science Visibility is hot! 4 papers at Siggraph 4 papers at the EG rendering workshop A wonderful dedicated workshop in Corsica! A big industrial
Some Thoughts on Visibility Frédo Durand MIT Lab for Computer Science Visibility is hot! 4 papers at Siggraph 4 papers at the EG rendering workshop A wonderful dedicated workshop in Corsica! A big industrial
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Multiview Reconstruction
 Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Convergent Modeling and Reverse Engineering
 Convergent Modeling and Reverse Engineering 25 October 2017 Realize innovation. Tod Parrella NX Design Product Management Product Engineering Solutions tod.parrella@siemens.com Realize innovation. Siemens
Convergent Modeling and Reverse Engineering 25 October 2017 Realize innovation. Tod Parrella NX Design Product Management Product Engineering Solutions tod.parrella@siemens.com Realize innovation. Siemens
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
Recognizing Deformable Shapes. Salvador Ruiz Correa Ph.D. UW EE
 Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
Cell Decomposition for Building Model Generation at Different Scales
 Cell Decomposition for Building Model Generation at Different Scales Norbert Haala, Susanne Becker, Martin Kada Institute for Photogrammetry Universität Stuttgart Germany forename.lastname@ifp.uni-stuttgart.de
Cell Decomposition for Building Model Generation at Different Scales Norbert Haala, Susanne Becker, Martin Kada Institute for Photogrammetry Universität Stuttgart Germany forename.lastname@ifp.uni-stuttgart.de
Omni Stereo Vision of Cooperative Mobile Robots
 Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Recognizing Deformable Shapes. Salvador Ruiz Correa (CSE/EE576 Computer Vision I)
") Recognizing Deformable Shapes Salvador Ruiz Correa (CSE/EE576 Computer Vision I) Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes
Recognizing Deformable Shapes Salvador Ruiz Correa (CSE/EE576 Computer Vision I) Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Automated Feature-Based Range Registration of Urban Scenes of Large Scale
 Automated Feature-Based Range Registration of Urban Scenes of Large Scale Ioannis Stamos and Marius Leordeanu Department of Computer Science, Hunter College, City University of New York, NY, NY 1001 {istamos,mleordeanu}@hunter.cuny.edu
Automated Feature-Based Range Registration of Urban Scenes of Large Scale Ioannis Stamos and Marius Leordeanu Department of Computer Science, Hunter College, City University of New York, NY, NY 1001 {istamos,mleordeanu}@hunter.cuny.edu
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
LATEST TRENDS on APPLIED MATHEMATICS, SIMULATION, MODELLING
 3D surface reconstruction of objects by using stereoscopic viewing Baki Koyuncu, Kurtuluş Küllü bkoyuncu@ankara.edu.tr kkullu@eng.ankara.edu.tr Computer Engineering Department, Ankara University, Ankara,
3D surface reconstruction of objects by using stereoscopic viewing Baki Koyuncu, Kurtuluş Küllü bkoyuncu@ankara.edu.tr kkullu@eng.ankara.edu.tr Computer Engineering Department, Ankara University, Ankara,
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Reconstruction of complete 3D object model from multi-view range images.
 Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping
 74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Recognition: Face Recognition. Linda Shapiro EE/CSE 576
 Recognition: Face Recognition Linda Shapiro EE/CSE 576 1 Face recognition: once you ve detected and cropped a face, try to recognize it Detection Recognition Sally 2 Face recognition: overview Typical
Recognition: Face Recognition Linda Shapiro EE/CSE 576 1 Face recognition: once you ve detected and cropped a face, try to recognize it Detection Recognition Sally 2 Face recognition: overview Typical
Surface and Solid Geometry. 3D Polygons
 Surface and Solid Geometry D olygons Once we know our plane equation: Ax + By + Cz + D = 0, we still need to manage the truncation which leads to the polygon itself Functionally, we will need to do this
Surface and Solid Geometry D olygons Once we know our plane equation: Ax + By + Cz + D = 0, we still need to manage the truncation which leads to the polygon itself Functionally, we will need to do this
AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor
 AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor Takafumi Taketomi, Tomokazu Sato, and Naokazu Yokoya Graduate School of Information
AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor Takafumi Taketomi, Tomokazu Sato, and Naokazu Yokoya Graduate School of Information
INCORPORATION OF A-PRIORI INFORMATION IN PLANNING THE NEXT BEST VIEW
 INCORPORATION OF A-PRIORI INFORMATION IN PLANNING THE NEXT BEST VIEW Christoph Munkelt 1, Peter Kühmstedt 1 and Joachim Denzler 2 1 ) Fraunhofer IOF, Albert-Einstein-Str. 7, 07745 Jena, Germany Email:
INCORPORATION OF A-PRIORI INFORMATION IN PLANNING THE NEXT BEST VIEW Christoph Munkelt 1, Peter Kühmstedt 1 and Joachim Denzler 2 1 ) Fraunhofer IOF, Albert-Einstein-Str. 7, 07745 Jena, Germany Email:
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera
 Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera Wolfgang Niem, Jochen Wingbermühle Universität Hannover Institut für Theoretische Nachrichtentechnik und Informationsverarbeitung
Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera Wolfgang Niem, Jochen Wingbermühle Universität Hannover Institut für Theoretische Nachrichtentechnik und Informationsverarbeitung
View Planning and Automated Data Acquisition for Three-Dimensional Modeling of Complex Sites
 View Planning and Automated Data Acquisition for Three-Dimensional Modeling of Complex Sites Paul S. Blaer and Peter K. Allen Department of Computer Science Columbia University New York, New York 10027
View Planning and Automated Data Acquisition for Three-Dimensional Modeling of Complex Sites Paul S. Blaer and Peter K. Allen Department of Computer Science Columbia University New York, New York 10027
Manhattan-World Assumption for As-built Modeling Industrial Plant
 Manhattan-World Assumption for As-built Modeling Industrial Plant Tomohiro Mizoguchi 1, Tomokazu Kuma 2, Yoshikazu Kobayashi 3 and Kenji Shirai 4 Department of Computer Science, College of Engineering,
Manhattan-World Assumption for As-built Modeling Industrial Plant Tomohiro Mizoguchi 1, Tomokazu Kuma 2, Yoshikazu Kobayashi 3 and Kenji Shirai 4 Department of Computer Science, College of Engineering,
View Planning for Automated Three-Dimensional Object Reconstruction and Inspection
 View Planning for Automated Three-Dimensional Object Reconstruction and Inspection WILLIAM R. SCOTT and GERHARD ROTH National Research Council of Canada AND JEAN-FRANÇOIS RIVEST University of Ottawa Laser
View Planning for Automated Three-Dimensional Object Reconstruction and Inspection WILLIAM R. SCOTT and GERHARD ROTH National Research Council of Canada AND JEAN-FRANÇOIS RIVEST University of Ottawa Laser
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
Acquisition and Visualization of Colored 3D Objects
 Acquisition and Visualization of Colored 3D Objects Kari Pulli Stanford University Stanford, CA, U.S.A kapu@cs.stanford.edu Habib Abi-Rached, Tom Duchamp, Linda G. Shapiro and Werner Stuetzle University
Acquisition and Visualization of Colored 3D Objects Kari Pulli Stanford University Stanford, CA, U.S.A kapu@cs.stanford.edu Habib Abi-Rached, Tom Duchamp, Linda G. Shapiro and Werner Stuetzle University
Geometry and Texture Recovery of Scenes of Large Scale
 Computer Vision and Image Understanding 88, 94 118 (2002) doi:10.1006/cviu.2002.0963 Geometry and Texture Recovery of Scenes of Large Scale Ioannis Stamos Computer Science Department, Hunter College and
Computer Vision and Image Understanding 88, 94 118 (2002) doi:10.1006/cviu.2002.0963 Geometry and Texture Recovery of Scenes of Large Scale Ioannis Stamos Computer Science Department, Hunter College and
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Visibility. Tom Funkhouser COS 526, Fall Slides mostly by Frédo Durand
 Visibility Tom Funkhouser COS 526, Fall 2016 Slides mostly by Frédo Durand Visibility Compute which part of scene can be seen Visibility Compute which part of scene can be seen (i.e., line segment from
Visibility Tom Funkhouser COS 526, Fall 2016 Slides mostly by Frédo Durand Visibility Compute which part of scene can be seen Visibility Compute which part of scene can be seen (i.e., line segment from
Pattern Recognition for Autonomous. Pattern Recognition for Autonomous. Driving. Freie Universität t Berlin. Raul Rojas
 Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
3D Modeling I. CG08b Lior Shapira Lecture 8. Based on: Thomas Funkhouser,Princeton University. Thomas Funkhouser 2000
 3D Modeling I CG08b Lior Shapira Lecture 8 Based on: Thomas Funkhouser,Princeton University Course Syllabus I. Image processing II. Rendering III. Modeling IV. Animation Image Processing (Rusty Coleman,
3D Modeling I CG08b Lior Shapira Lecture 8 Based on: Thomas Funkhouser,Princeton University Course Syllabus I. Image processing II. Rendering III. Modeling IV. Animation Image Processing (Rusty Coleman,
Semi-automatic range to range registration: a feature-based method
 Semi-automatic range to range registration: a feature-based method Chen Chao Graduate Center of CUNY, New York, NY, CChen@gc.cuny.edu Ioannis Stamos Hunter College and Graduate Center of CUNY, New York,
Semi-automatic range to range registration: a feature-based method Chen Chao Graduate Center of CUNY, New York, NY, CChen@gc.cuny.edu Ioannis Stamos Hunter College and Graduate Center of CUNY, New York,
Overview of 3D Object Representations
 Overview of 3D Object Representations Thomas Funkhouser Princeton University C0S 426, Fall 2000 Course Syllabus I. Image processing II. Rendering III. Modeling IV. Animation Image Processing (Rusty Coleman,
Overview of 3D Object Representations Thomas Funkhouser Princeton University C0S 426, Fall 2000 Course Syllabus I. Image processing II. Rendering III. Modeling IV. Animation Image Processing (Rusty Coleman,
P1: OTA/XYZ P2: ABC c01 JWBK288-Cyganek December 5, :11 Printer Name: Yet to Come. Part I COPYRIGHTED MATERIAL
 Part I COPYRIGHTED MATERIAL 1 Introduction The purpose of this text on stereo-based imaging is twofold: it is to give students of computer vision a thorough grounding in the image analysis and projective
Part I COPYRIGHTED MATERIAL 1 Introduction The purpose of this text on stereo-based imaging is twofold: it is to give students of computer vision a thorough grounding in the image analysis and projective
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Simulation in Computer Graphics Space Subdivision. Matthias Teschner
 Simulation in Computer Graphics Space Subdivision Matthias Teschner Outline Introduction Uniform grid Octree and k-d tree BSP tree University of Freiburg Computer Science Department 2 Model Partitioning
Simulation in Computer Graphics Space Subdivision Matthias Teschner Outline Introduction Uniform grid Octree and k-d tree BSP tree University of Freiburg Computer Science Department 2 Model Partitioning
Dedication This thesis is dedicated to my parents Patricia Jo Wong and Seok Pin Wong who have given me the means to get this far and have never doubte
 AN ALGORITHM AND SYSTEM FOR FINDING THE NEXT BEST VIEW IN A 3-D OBJECT MODELING TASK A thesis Presented for the Master of Science Degree The University of Tennessee, Knoxville Laurana Moy-ping Wong May
AN ALGORITHM AND SYSTEM FOR FINDING THE NEXT BEST VIEW IN A 3-D OBJECT MODELING TASK A thesis Presented for the Master of Science Degree The University of Tennessee, Knoxville Laurana Moy-ping Wong May
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Mapping textures on 3D geometric model using reflectance image
 Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Modeling, Combining, and Rendering Dynamic Real-World Events From Image Sequences
 Modeling, Combining, and Rendering Dynamic Real-World Events From Image s Sundar Vedula, Peter Rander, Hideo Saito, and Takeo Kanade The Robotics Institute Carnegie Mellon University Abstract Virtualized
Modeling, Combining, and Rendering Dynamic Real-World Events From Image s Sundar Vedula, Peter Rander, Hideo Saito, and Takeo Kanade The Robotics Institute Carnegie Mellon University Abstract Virtualized
LAIR. UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology
 UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology COS 402: Artificial Intelligence - Sept. 2011 Christopher M. Clark Outline! Past Projects! Maltese Cistern Mapping!
UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology COS 402: Artificial Intelligence - Sept. 2011 Christopher M. Clark Outline! Past Projects! Maltese Cistern Mapping!
CS4620/5620: Lecture 14 Pipeline
 CS4620/5620: Lecture 14 Pipeline 1 Rasterizing triangles Summary 1! evaluation of linear functions on pixel grid 2! functions defined by parameter values at vertices 3! using extra parameters to determine
CS4620/5620: Lecture 14 Pipeline 1 Rasterizing triangles Summary 1! evaluation of linear functions on pixel grid 2! functions defined by parameter values at vertices 3! using extra parameters to determine
Collision Detection based on Spatial Partitioning
 Simulation in Computer Graphics Collision Detection based on Spatial Partitioning Matthias Teschner Computer Science Department University of Freiburg Outline introduction uniform grid Octree and k-d tree
Simulation in Computer Graphics Collision Detection based on Spatial Partitioning Matthias Teschner Computer Science Department University of Freiburg Outline introduction uniform grid Octree and k-d tree
Visual Learning and Recognition of 3D Objects from Appearance
 Visual Learning and Recognition of 3D Objects from Appearance (H. Murase and S. Nayar, "Visual Learning and Recognition of 3D Objects from Appearance", International Journal of Computer Vision, vol. 14,
Visual Learning and Recognition of 3D Objects from Appearance (H. Murase and S. Nayar, "Visual Learning and Recognition of 3D Objects from Appearance", International Journal of Computer Vision, vol. 14,
CELL DECOMPOSITION FOR THE GENERATION OF BUILDING MODELS AT MULTIPLE SCALES
 CELL DECOMPOSITION FOR THE GENERATION OF BUILDING MODELS AT MULTIPLE SCALES Norbert Haala, Susanne Becker, Martin Kada Institute for Photogrammetry, Universitaet Stuttgart Geschwister-Scholl-Str. 24D,
CELL DECOMPOSITION FOR THE GENERATION OF BUILDING MODELS AT MULTIPLE SCALES Norbert Haala, Susanne Becker, Martin Kada Institute for Photogrammetry, Universitaet Stuttgart Geschwister-Scholl-Str. 24D,
L1 - Introduction. Contents. Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming
 L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
A Volumetric Method for Building Complex Models from Range Images
 A Volumetric Method for Building Complex Models from Range Images Brian Curless Marc Levoy Computer Graphics Laboratory Stanford University Introduction Goal Given a set of aligned, dense range images,
A Volumetric Method for Building Complex Models from Range Images Brian Curless Marc Levoy Computer Graphics Laboratory Stanford University Introduction Goal Given a set of aligned, dense range images,
Complex Models from Range Images. A Volumetric Method for Building. Brian Curless. Marc Levoy. Computer Graphics Laboratory. Stanford University
 A Volumetric Method for Building Complex Models from Range Images Computer Graphics Laboratory Stanford University Brian Curless Marc Levoy Introduction Goal Given a set of aligned, dense range images,
A Volumetric Method for Building Complex Models from Range Images Computer Graphics Laboratory Stanford University Brian Curless Marc Levoy Introduction Goal Given a set of aligned, dense range images,
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots
 Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Estimation of common groundplane based on co-motion statistics
 Estimation of common groundplane based on co-motion statistics Zoltan Szlavik, Laszlo Havasi 2, Tamas Sziranyi Analogical and Neural Computing Laboratory, Computer and Automation Research Institute of
Estimation of common groundplane based on co-motion statistics Zoltan Szlavik, Laszlo Havasi 2, Tamas Sziranyi Analogical and Neural Computing Laboratory, Computer and Automation Research Institute of
Integrated High-Quality Acquisition of Geometry and Appearance for Cultural Heritage
 Integrated High-Quality Acquisition of Geometry and Appearance for Cultural Heritage Christopher Schwartz, Michael Weinmann, Roland Ruiters, Reinhard Klein Institute of Computer Science II Computer Graphics
Integrated High-Quality Acquisition of Geometry and Appearance for Cultural Heritage Christopher Schwartz, Michael Weinmann, Roland Ruiters, Reinhard Klein Institute of Computer Science II Computer Graphics
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
ARCHITECTURE & GAMES. A is for Architect Simple Mass Modeling FORM & SPACE. Industry Careers Framework. Applied. Getting Started.
 A is for Architect Simple Mass Modeling One of the first introductions to form and space usually comes at a very early age. As an infant, you might have played with building blocks to help hone your motor
A is for Architect Simple Mass Modeling One of the first introductions to form and space usually comes at a very early age. As an infant, you might have played with building blocks to help hone your motor
3D Digitization of a Hand-held Object with a Wearable Vision Sensor
 3D Digitization of a Hand-held Object with a Wearable Vision Sensor Sotaro TSUKIZAWA, Kazuhiko SUMI, and Takashi MATSUYAMA tsucky@vision.kuee.kyoto-u.ac.jp sumi@vision.kuee.kyoto-u.ac.jp tm@i.kyoto-u.ac.jp
3D Digitization of a Hand-held Object with a Wearable Vision Sensor Sotaro TSUKIZAWA, Kazuhiko SUMI, and Takashi MATSUYAMA tsucky@vision.kuee.kyoto-u.ac.jp sumi@vision.kuee.kyoto-u.ac.jp tm@i.kyoto-u.ac.jp
3D Complex Scenes Segmentation from a Single Range Image Using Virtual Exploration
 3D Complex Scenes Segmentation from a Single Range Image Using Virtual Exploration P. Merchán 1, A. Adán 2, S. Salamanca 1, C. Cerrada 3 1 Escuela de Ingenierías Industriales, Universidad de Extremadura,
3D Complex Scenes Segmentation from a Single Range Image Using Virtual Exploration P. Merchán 1, A. Adán 2, S. Salamanca 1, C. Cerrada 3 1 Escuela de Ingenierías Industriales, Universidad de Extremadura,
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Intelligent Outdoor Navigation of a Mobile Robot Platform Using a Low Cost High Precision RTK-GPS and Obstacle Avoidance System
 Intelligent Outdoor Navigation of a Mobile Robot Platform Using a Low Cost High Precision RTK-GPS and Obstacle Avoidance System Under supervision of: Prof. Dr. -Ing. Klaus-Dieter Kuhnert Dipl.-Inform.
Intelligent Outdoor Navigation of a Mobile Robot Platform Using a Low Cost High Precision RTK-GPS and Obstacle Avoidance System Under supervision of: Prof. Dr. -Ing. Klaus-Dieter Kuhnert Dipl.-Inform.
STATEMENT REGARDING FEDERALLY SPONSORED RESEARCH OR THE NAMES OF THE PARTIES TO A JOINT RESEARCH AGREEMENT.
 TITLE OF INVENTION. A distance measuring device using a method of spanning separately targeted endpoints. This application claims the benefit of U.S. Provisional Application No. 61/477,511, filed April
TITLE OF INVENTION. A distance measuring device using a method of spanning separately targeted endpoints. This application claims the benefit of U.S. Provisional Application No. 61/477,511, filed April
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
A Simulation of Automatic 3D Acquisition and Post-processing Pipeline
 A Simulation of Automatic 3D Acquisition and Post-processing Pipeline Arsalan MALIK, Benjamin LORIOT, Youssef BOKHABRINE, Patrick GORRIA and Ralph SEULIN Le2i Laboratory - UMR CNRS 5158 - Université de
A Simulation of Automatic 3D Acquisition and Post-processing Pipeline Arsalan MALIK, Benjamin LORIOT, Youssef BOKHABRINE, Patrick GORRIA and Ralph SEULIN Le2i Laboratory - UMR CNRS 5158 - Université de
Dual-Beam Structured-Light Scanning for 3-D Object Modeling
 Dual-Beam Structured-Light Scanning for 3-D Object Modeling Johnny Park, Guilherme N. DeSouza, and Avinash C. Kak Robot Vision Laboratory, Purdue University 1285 EE Building, West Lafayette, IN. 47907-1285
Dual-Beam Structured-Light Scanning for 3-D Object Modeling Johnny Park, Guilherme N. DeSouza, and Avinash C. Kak Robot Vision Laboratory, Purdue University 1285 EE Building, West Lafayette, IN. 47907-1285
3D Collision Avoidance for Navigation in Unstructured Environments
 3D Collision Avoidance for Navigation in Unstructured Environments Armin Hornung Humanoid Robots Lab, University of Freiburg May 5, 2011 Motivation Personal robots are to operate in arbitrary complex environments:
3D Collision Avoidance for Navigation in Unstructured Environments Armin Hornung Humanoid Robots Lab, University of Freiburg May 5, 2011 Motivation Personal robots are to operate in arbitrary complex environments:
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of